

Optimal Control for Ride Comfort of Cooperative Adaptive Cruise Control System Under Mixed Traffic Flow
-
摘要:
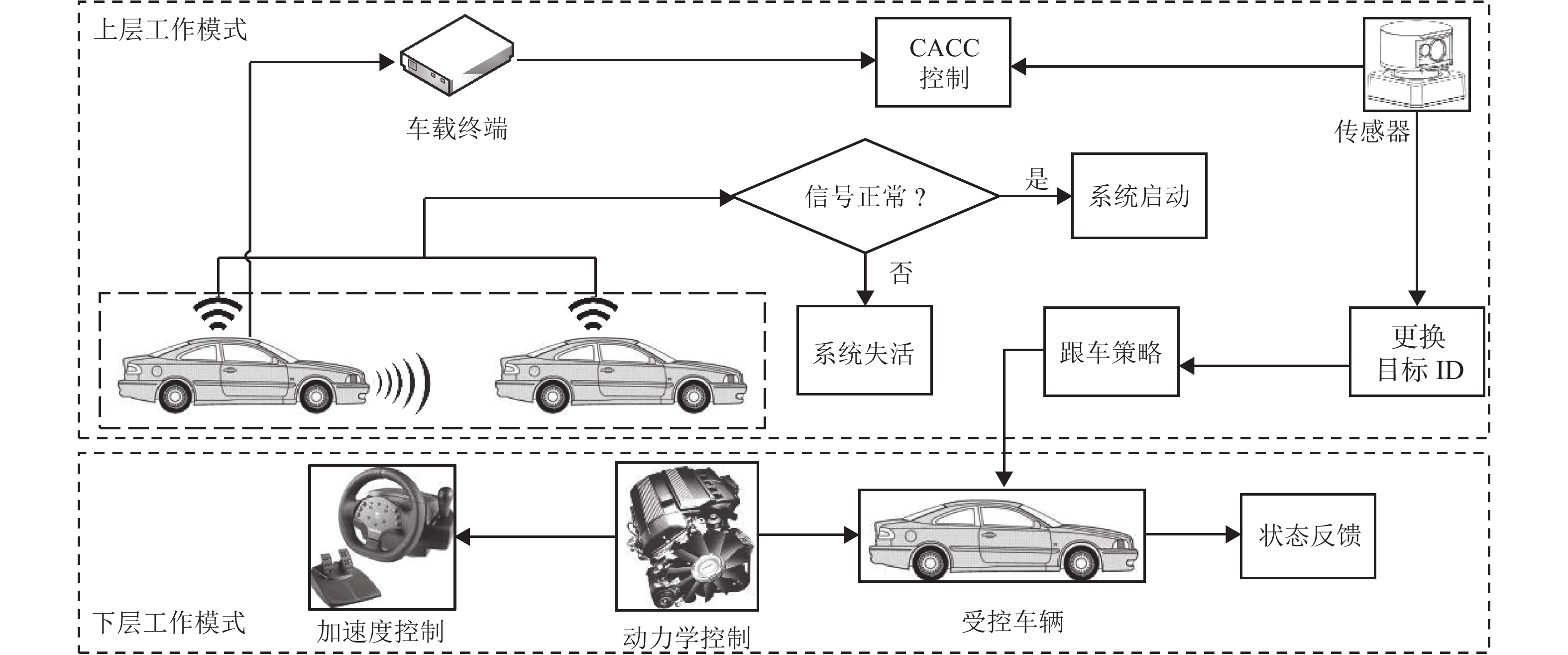
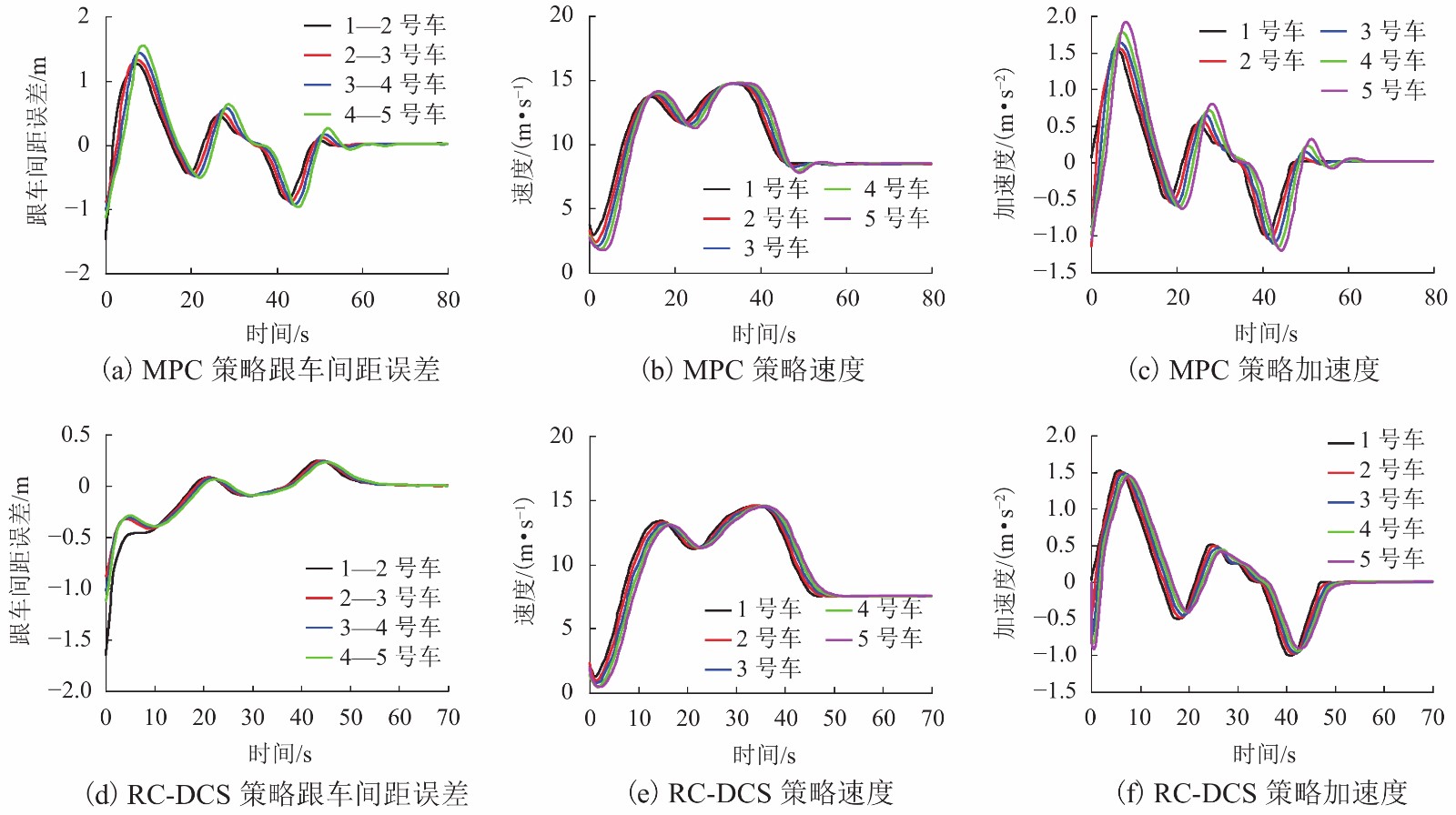
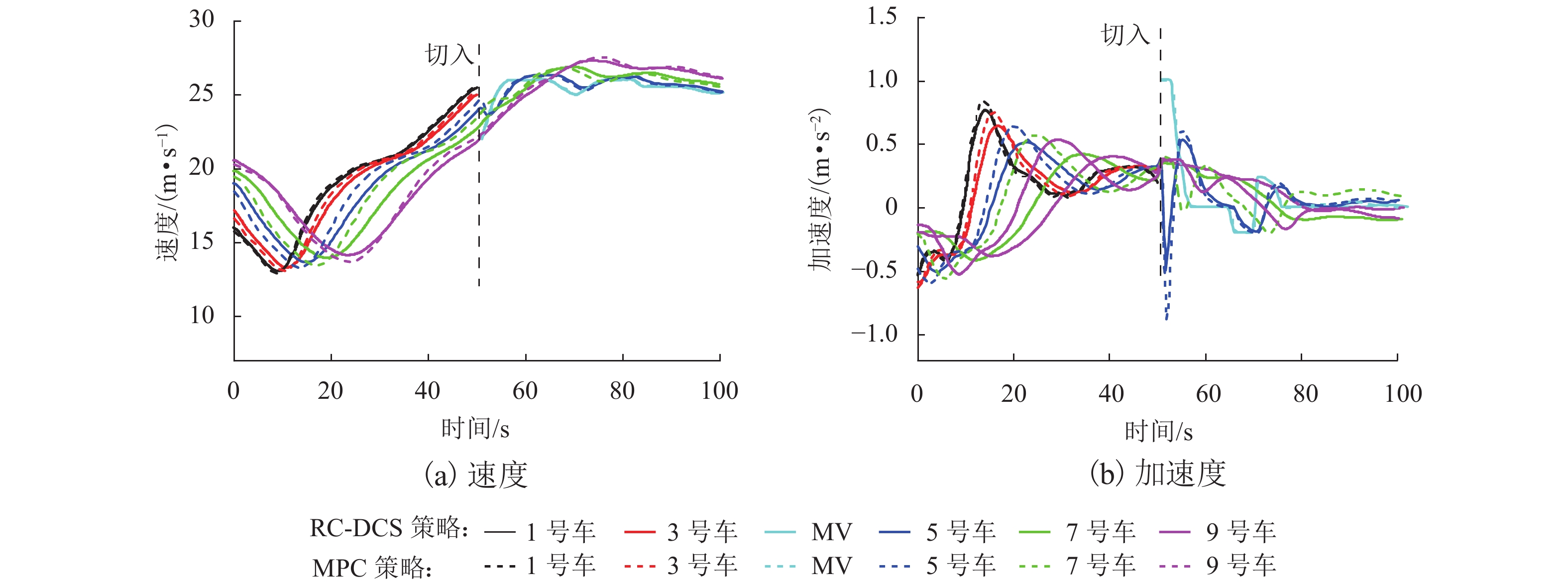
为提升协同式自适应巡航(cooperative adaptive cruise control,CACC)系统在由自动网联汽车(connected automated vehicle,CAV)和人工驾驶汽车(manual vehicle,MV)构成的混行交通流下的驾乘舒适性,提出考虑驾乘舒适性的双层控制策略(dual-layer control strategy considering ride comfort,RC-DCS). 上层控制器从宏观角度出发,采用两状态空间模型调整跟车间距及车速,并利用代价函数改善车队的整体稳定性和舒适性;下层控制器从微观角度出发,优化单车的油门和制动踏板切换逻辑,稳定实际加速度输出,降低车辆频繁加减速引起的自身俯仰. 试验结果表明:RC-DCS在跟随MV工况中跟车间距误差和加速度分别降低了72.44%和24.87%;在MV插入CACC车队工况中通过增大跟车时距0.4 s以减少加速度波动;在跟车、紧急制动、旁车切入3种典型工况中,单车加速度标准差分别降低了9.6%、10.4%、2.9%.
Abstract:To improve the ride comfort of cooperative adaptive cruise control (CACC) system under the mixed traffic flow that comprises connected automated vehicle (CAV) and manual vehicle (MV), a dual-layer control strategy considering ride comfort (RC-DCS) is proposed. From a macro perspective, the upper controller adopts a two-state space model to adjust the following distance and speed, and improve the overall stability and comfort of the fleet by the use of the cost function. From a microscopic perspective, the lower controller optimizes the logic of switching the throttle and brake pedal of a single vehicle, and stabilizes its actual acceleration output, thereby reducing the pitch caused by frequent acceleration and deceleration. The experimental results show that, the RC-DCS can reduce the following distance error and acceleration by 72.44% and 24.87% respectively in following MV condition. In the condition of MV cut-in CACC fleet, the acceleration fluctuation is reduced by increasing the following headway of 0.4 s. In the three typical conditions of vehicle following, emergency braking and cut-in, the standard deviation of the single-vehicle acceleration is reduced by 9.6%, 10.4% and 2.9%, respectively.
-
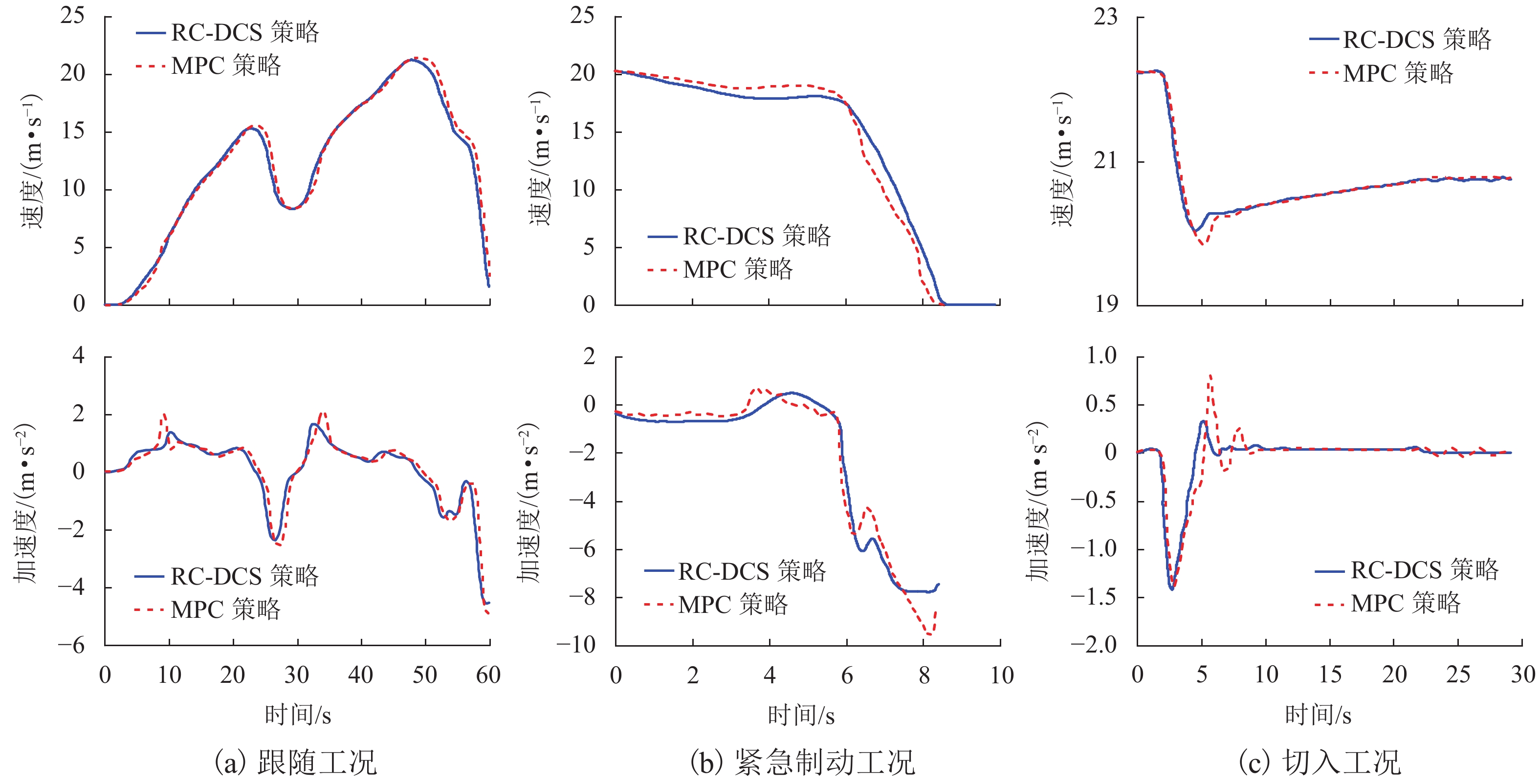
图 5 典型工况下单车试验结果对比
Figure 5. Result comparison of single vehicle experiments under typical working conditions
表 1 控制规则表
Table 1. Control rules
ev ea NB NS ZO PS PB NB NB NB NS NS ZO NS NB NS NS ZO PS ZO NS NS ZO PS PS PS NS ZO PS PS PB PB ZO PS PS PB PB  下载: 导出CSV
下载: 导出CSV
表 2 切换控制策略
Table 2. Switching control strategies
当前
状态输出方案 减速区域
(ev < −0.1)保持区域
(−0.1 ≤ ev ≤ 0.1)加速区域
(ev > 0.1)TA TC TC TC BA BC BC BC NA BC NO TC
下载: 导出CSV
-
[1] BANSAL P, KOCKELMAN K M. Forecasting Americans’ long-term adoption of connected and autonomous vehicle technologies[J]. Transportation Research Part A:Policy and Practice, 2017, 95: 49-63. doi: 10.1016/j.tra.2016.10.013 [2] KILINC A S, BAYBURA T. Determination of minimum horizontal curve radius used in the design of transportation structures, depending on the limit value of comfort criterion lateral jerk[R]. Rome: University of Saskatchewan, 2012. [3] FORSTBERG J. Ride comfort and motion sickness in tilting trains: Human responses to motion environments in train and simulator experiments[D]. Stockholm: Royal Institute of Technology, 2000. [4] POWELL J P, PALACÍN R. Passenger stability within moving railway vehicles:limits on maximum longitudinal acceleration[J]. Urban Rail Transit, 2015, 1(2): 95-103. doi: 10.1007/s40864-015-0012-y [5] GOLDING J F, MUELLER A G, GRESTY M A. A motion sickness maximum around the 0.2 Hz frequency range of horizontal translational oscillation[J]. Aviation,Space,and Environmental Medicine, 2001, 72(3): 188-192. [6] DONOHEW B E, GRIFFIN M J. Motion sickness:effect of the frequency of lateral oscillation[J]. Aviation,Space,and Environmental Medicine, 2004, 75(8): 649-656. [7] CHEUNG B, NAKASHIMA A. A review on the effects of frequency of oscillation on motion sickness[R]. Toronto: Defence Research and Development Toronto, 2006. [8] ELBANHAWI M, SIMIC M, JAZAR R. In the passenger seat:investigating ride comfort measures in autonomous cars[J]. IEEE Intelligent Transportation Systems Magazine, 2015, 7(3): 4-17. doi: 10.1109/MITS.2015.2405571 [9] MILAKIS D, VAN AREM B, WEE B V. Policy and society related implications of automated driving:a review of literature and directions for future research[J]. Journal of Intelligent Transportation Systems, 2017, 21(4): 324-348. doi: 10.1080/15472450.2017.1291351 [10] YANG C Y D, OZBAY K, BAN X. Developments in connected and automated vehicles[J]. Journal of Intelligent Transportation Systems, 2017, 21(1/2/3/4/5/6): 251-254. [11] HOOGENDOORN R G, VAN ARERM B, HOOGENDOOM S. Automated driving,traffic flow efficiency,and human factors:literature review[J]. Transportation Research Record, 2014, 2422(1): 113-120. doi: 10.3141/2422-13 [12] TALEBPOUR A, MAHMASSANI H S. Influence of connected and autonomous vehicles on traffic flow stability and throughput[J]. Transportation Research Part C:Emerging Technologies, 2016, 71: 143-163. doi: 10.1016/j.trc.2016.07.007 [13] SHLADOVER S E. Connected and automated vehicle systems:introduction and overview[J]. Journal of Intelligent Transportation Systems, 2018, 22(3): 190-200. doi: 10.1080/15472450.2017.1336053 [14] JIA D Y, NGODUY D. Enhanced cooperative car-following traffic model with the combination of V2V and V2I communication[J]. Transportation Research Part B:Methodological, 2016, 90: 172-191. doi: 10.1016/j.trb.2016.03.008 [15] SUN J, ZHENG Z D, SUN J. Stability analysis methods and their applicability to car-following models in conventional and connected environments[J]. Transportation Research Part B:Methodological, 2018, 109: 212-237. doi: 10.1016/j.trb.2018.01.013 [16] ZHOU Y, WANG M, AHN S. Distributed model predictive control approach for cooperative car-following with guaranteed local and string stability[J]. Transportation Research Part B:Methodological, 2019, 128: 69-86. doi: 10.1016/j.trb.2019.07.001 [17] MA Y L, LI Z X, MALEKIAN R, et al. Hierarchical fuzzy logic-based variable structure control for vehicles platooning[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(4): 1329-1340. doi: 10.1109/TITS.2018.2846198 [18] 王平,高天赐,汪鑫,等. 基于拟合平纵断面的铁路特大桥梁线路平顺性评估[J]. 西南交通大学学报,2020,55(2): 231-237, 272. doi: 10.1007/s12239-018-0034-zWANG Ping, GAO Tianci, WANG Xin, et al. Smoothness estimation of super-large bridges in railway line based on fitting railway plane and profile[J]. Journal of Southwest Jiaotong University, 2020, 55(2): 231-237, 272. doi: 10.1007/s12239-018-0034-z [19] SONG X L, WANG K, HE D F. Switching multi-objective receding horizon control for CACC of mixed vehicle strings[J]. IEEE Access, 2020, 8: 79684-79694. doi: 10.1109/ACCESS.2020.2990426 [20] ZHU M, CHEN H Y, XIONG G M. A model predictive speed tracking control approach for autonomous ground vehicles[J]. Mechanical Systems and Signal Processing, 2017, 87: 138-152. doi: 10.1016/j.ymssp.2016.03.003 [21] ZHOU Y J, ZHU H B, GUO M M, et al. Impact of CACC vehicles’ cooperative driving strategy on mixed four-lane highway traffic flow[J]. Physica A:Statistical Mechanics and Its Applications, 2020, 540: 122721.1-122721.13. doi: 10.1016/j.physa.2019.122721 [22] HE Y L, ZHOU Q, MAKRIDIS M, et al. Multiobjective co-optimization of cooperative adaptive cruise control and energy management strategy for PHEVs[J]. IEEE Transactions on Transportation Electrification, 2020, 6(1): 346-355. doi: 10.1109/TTE.2020.2974588 [23] NIE L Z, GUAN J Y, LU C H, et al. Longitudinal speed control of autonomous vehicle based on a self-adaptive PID of radial basis function neural network[J]. IET Intelligent Transport Systems, 2018, 12(6): 485-494. doi: 10.1049/iet-its.2016.0293 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 886
- HTML全文浏览量: 483
- PDF下载量: 27
- 被引次数: 0