

Cooperative Control Algorithm for Vehicle at Intersection Based on Driving Safety Field Model
-
摘要:
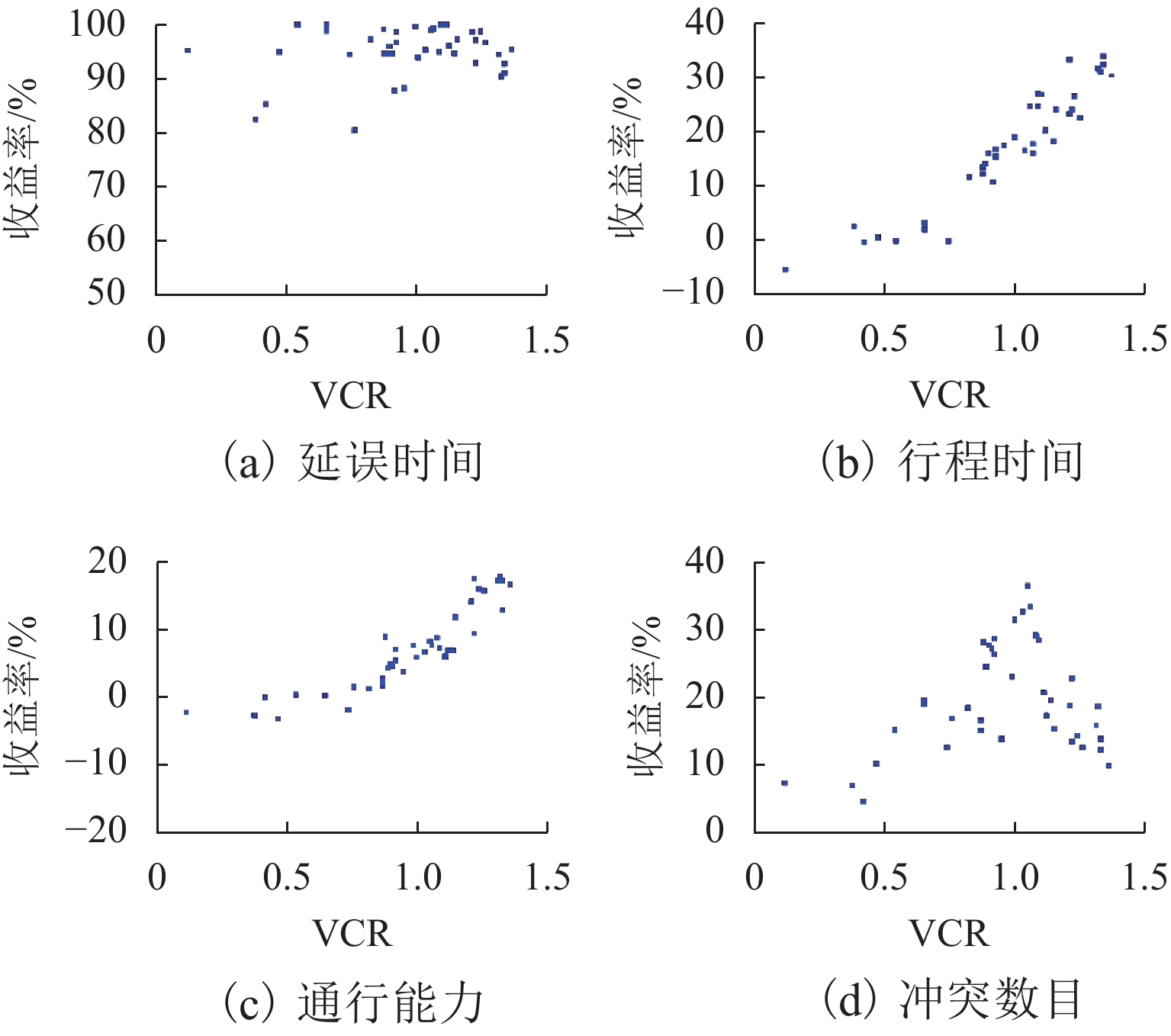
为了提高网联环境无信号交叉口自动驾驶车辆的行车安全与通行效率问题,首先,建立无信号交叉口的行车安全场模型,构建包括车辆动力性能、制动性能以及通行交叉口所有车辆行车风险的目标函数,并设定相应的约束条件;然后,采用模型预测控制方法优化驶向交叉口车辆的行车策略;最后,基于VISSIM、MATLAB和NS3构建联合仿真试验平台,分别以车辆碰撞冲突类型、行车风险改善和道路拥堵程度验证并分析算法性能. 试验结果表明:在车流量和流量容积比大于1.0时,相比于传统的感应控制系统,本文提出的算法在延误时间、行程时间、冲突数目和通行能力的收益率分别大于90%、10%、10%和5%;在通信延迟低于100 ms,数据丢包在35%内,仍能够保证交叉口内车辆的通行效率.
Abstract:In order to improve the driving safety and traffic efficiency of connected and automated vehicle (CAV) at non-signalized intersection, firstly, a driving safety field model of non-signalized intersection is established, the objective function considering vehicle performance and traffic risk of all vehicles at intersection is constructed, and the corresponding constraints are also proposed. The model predictive control is used to optimize driving strategy for all vehicles at the intersection. Co-simulation platform is built based on VISSIM, MATLAB and NS3, which verifies and analyzes the performance of the proposed algorithm based on vehicle collision type, driving risk improvement and traffic congestion level, respectively. The experimental results show that when the ratio of traffic flow to traffic volume is greater than 1.0, compared with the traditional actuated control system, the gain of the proposed algorithm is greater than 90%, 10%, 10% and 5% in delay time, travel time, number of conflicts and traffic capacity, respectively. When the communication delay is less than 100 ms and the data packet loss is within 35%, the vehicle traffic efficiency at the intersection can still be guaranteed.
-
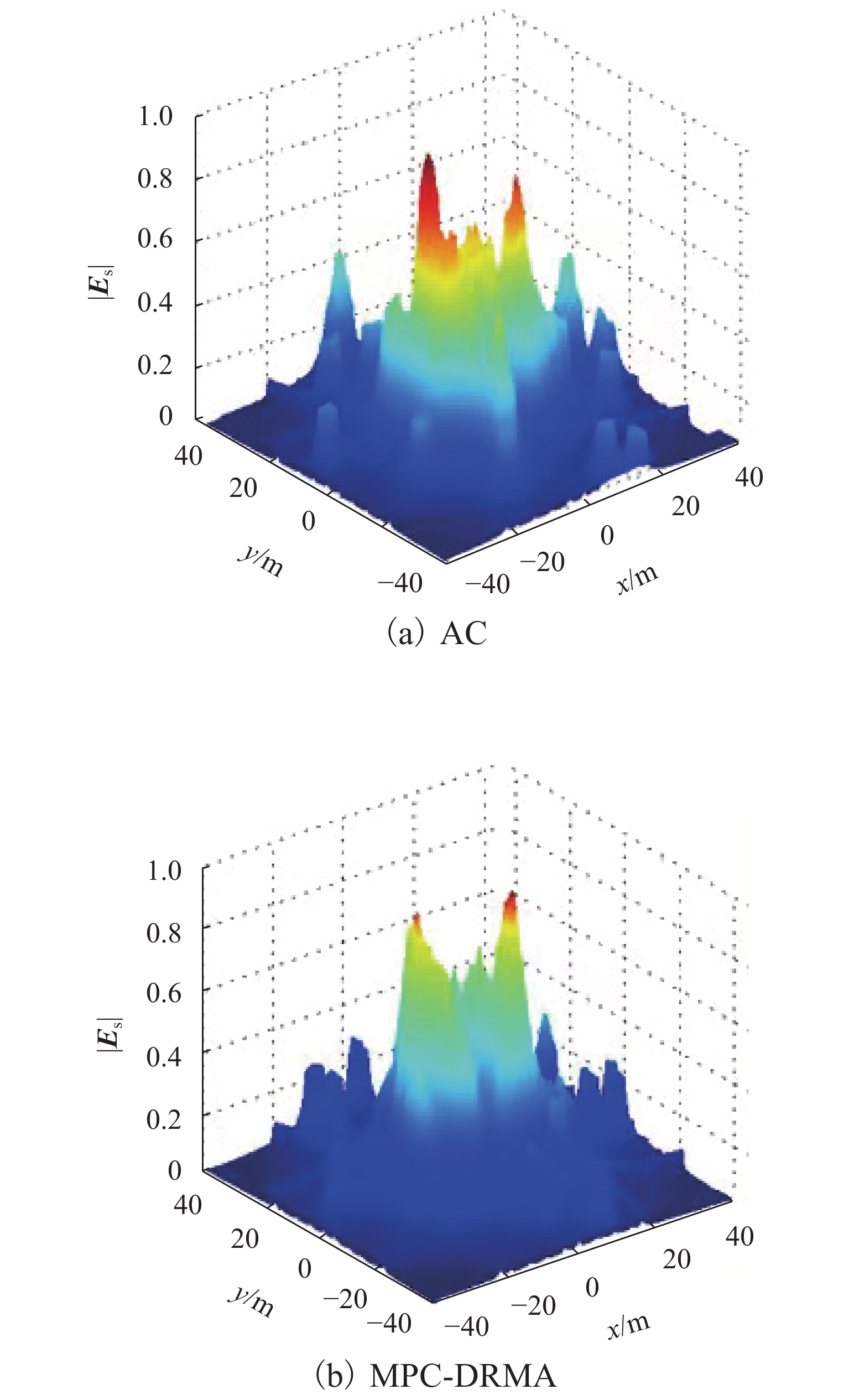
图 5 车辆冲突场强分布三维图
Figure 5. Three-dimensional diagram of field intensity distribution for vehicle conflict
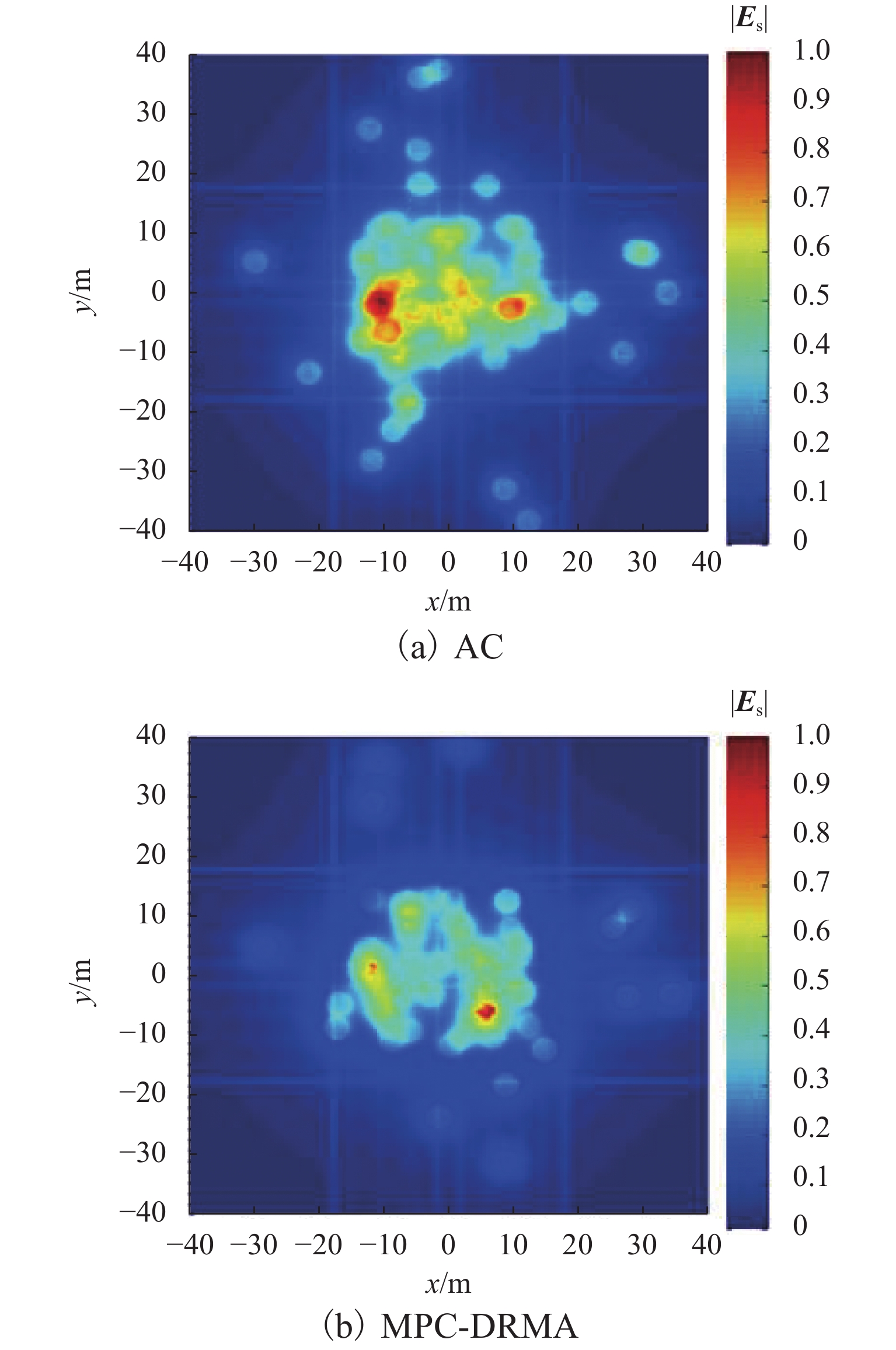
图 6 车辆冲突场强分布二维图
Figure 6. Two-dimensional diagram of field intensity distribution for vehicle conflict
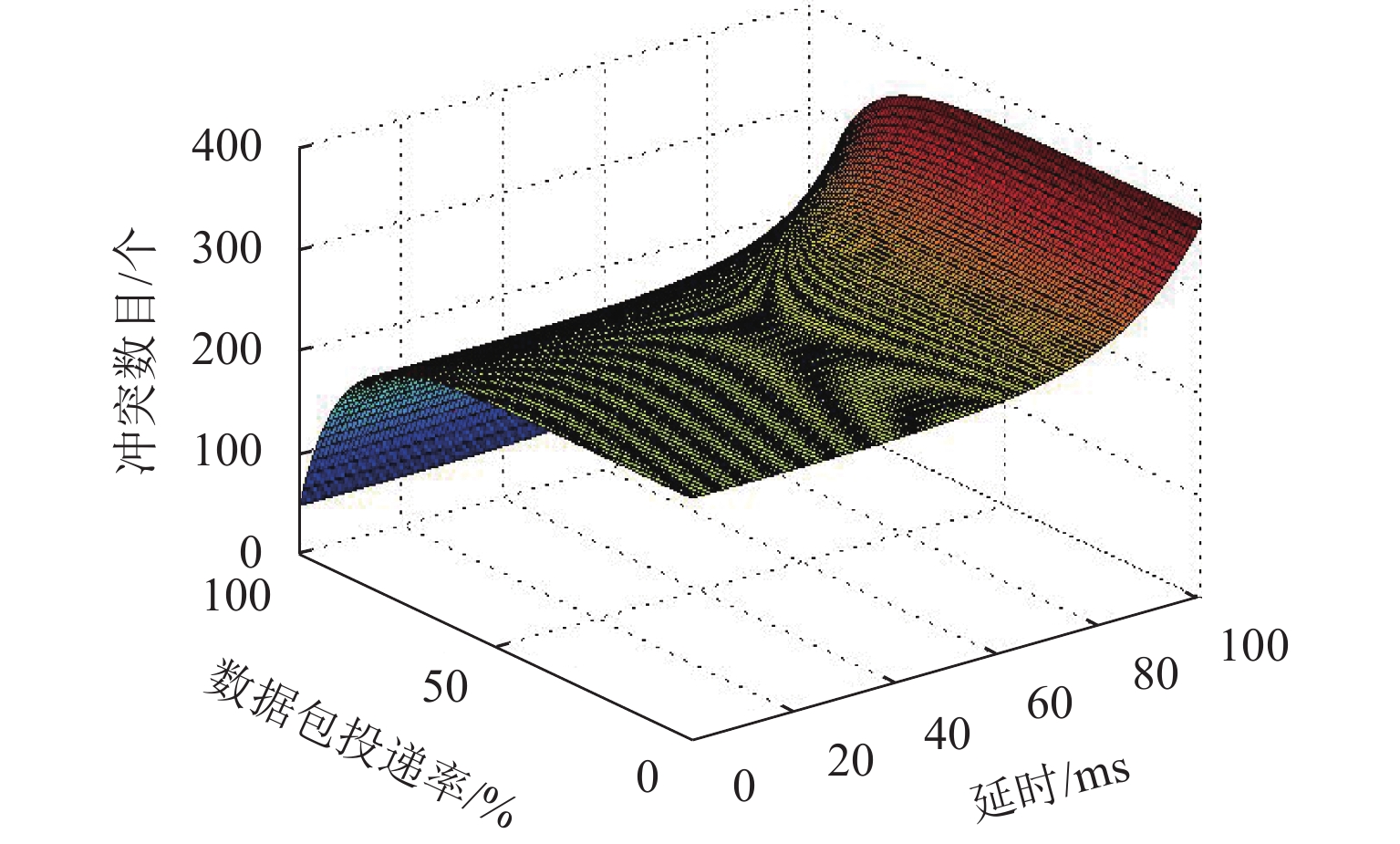
图 9 冲突数目与数据包投递率、平均端到端延迟的关系
Figure 9. Relationship between number of conflicts, PDR and Avdelay
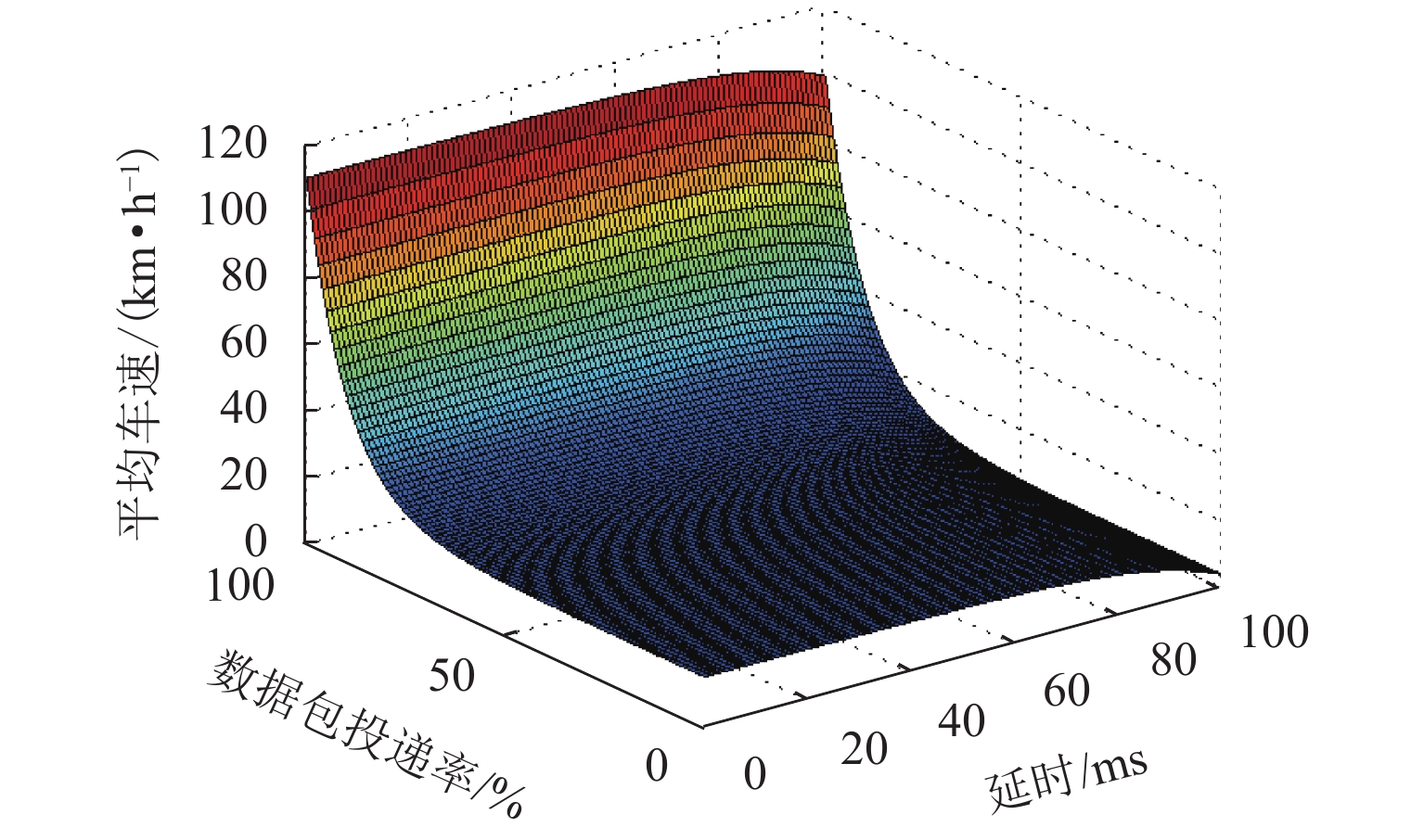
图 10 平均车速与数据包投递率、平均端到端延迟的关系
Figure 10. Relationship between average speed, PDR and Avdelay
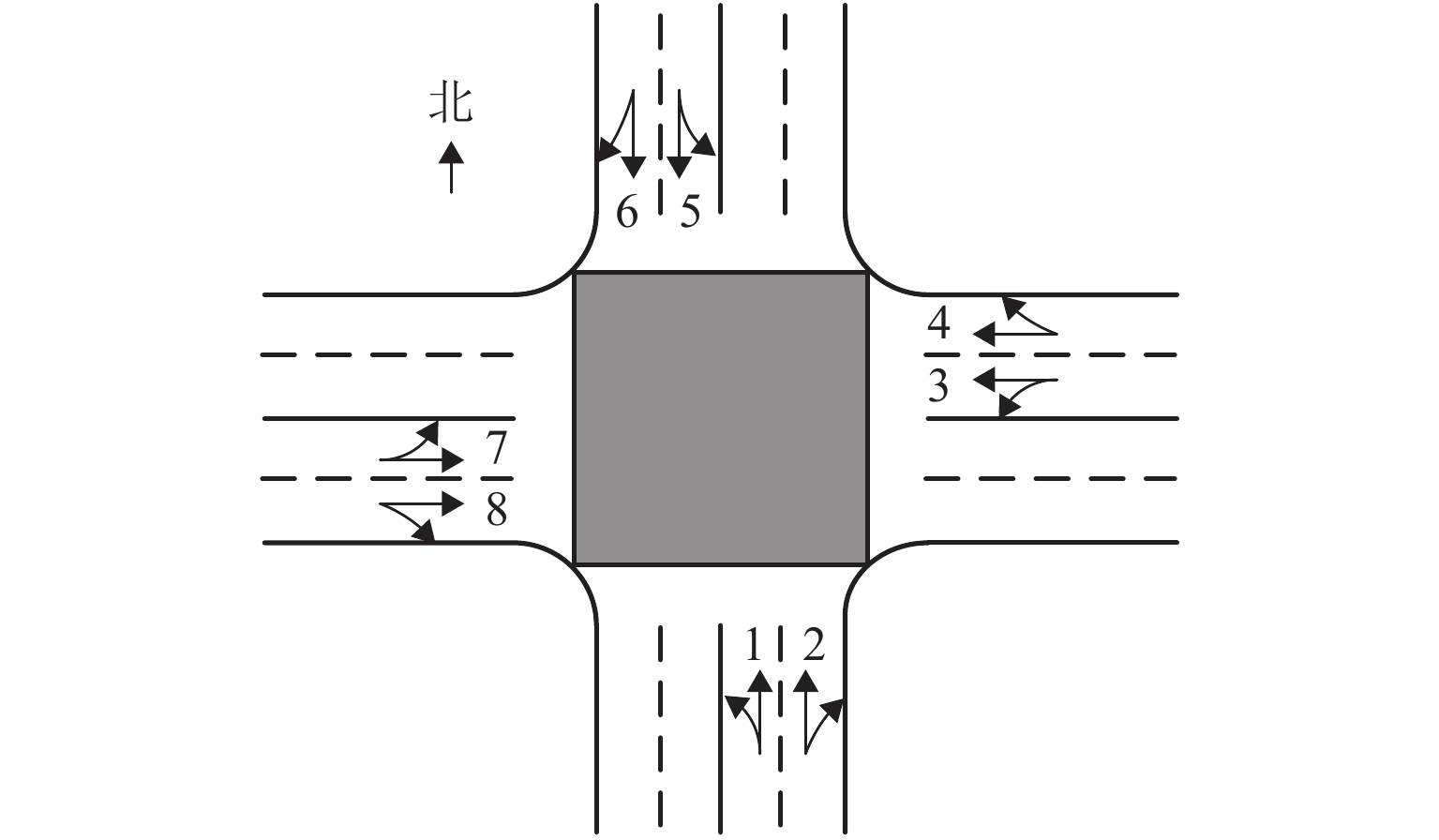
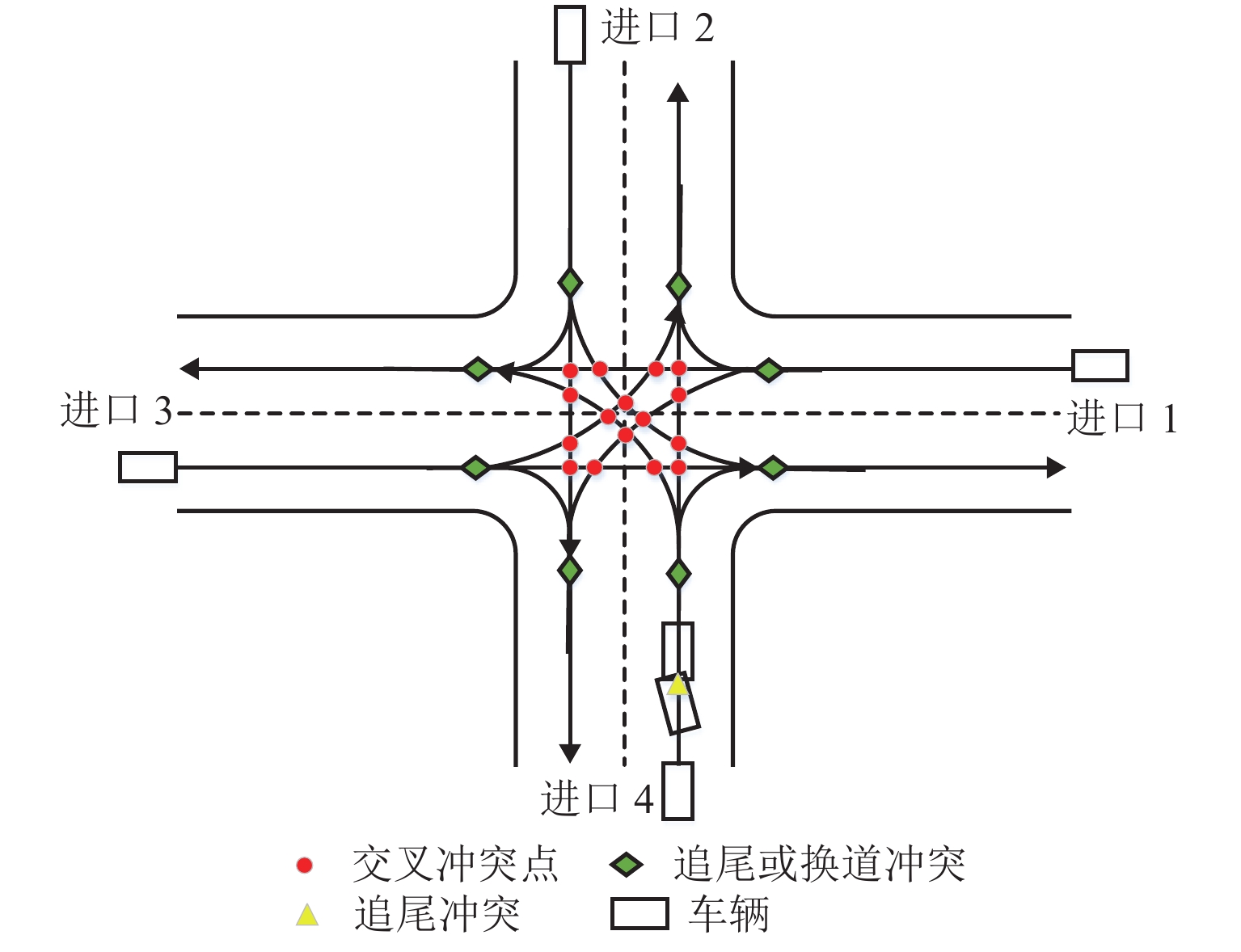
表 1 交叉口相位冲突
Table 1. Phase conflict at intersection
车道 车道 1 2 3 4 5 6 7 8 1 0 1 1 1 0 1 1 2 0 1 1 1 0 1 1 3 1 1 0 1 1 0 1 4 1 1 0 1 1 1 0 5 1 1 1 1 0 1 1 6 0 0 1 1 0 1 1 7 1 1 0 1 1 1 0 8 1 1 1 0 1 1 0  下载: 导出CSV
下载: 导出CSV
表 2 仿真参数
Table 2. Simulation parameters
主要参数 数值 机动车车道饱和流量/(辆·h−1) 1 900 车辆期望车速/(m·s−1) 16.67 最高车速/( m·s−1) 23.00 最低车速/( m·s−1) 3.00 车头时距/s 1.0 加速度最大值/( m·s−2) 4 加速度最小值/( m·s−2) −3 Ka 10 Kv 0.6 最大等待时间/s 100
下载: 导出CSV
-
[1] 中华人民共和国国家统计局. 中国统计年鉴2017[M].北京: 中国统计出版社, 2017. [2] 李克强,戴一凡,李升波,等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报,2017,8(1): 1-14. doi: 10.3969/j.issn.1674-8484.2017.01.001LI Keqiang, DAI Yifan, LI Shengbo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. Journal of Automotive Safety and Energy, 2017, 8(1): 1-14. doi: 10.3969/j.issn.1674-8484.2017.01.001 [3] LIN P Q, LIU J H, JIN P J, et al. Autonomous vehicle-intersection coordination method in a connected vehicle environment[J]. IEEE Intelligent Transportation Systems Magazine, 2017, 9(4): 37-47. doi: 10.1109/MITS.2017.2743167 [4] DRESNER K, STONE P. A multiagent approach to autonomous intersection management[J]. Journal of Artificial Intelligence Research, 2008, 31: 591-656. doi: 10.1613/jair.2502 [5] CHOUDHURY A, MASZCZYK T, MATH C B, et al. An integrated simulation environment for testing V2X protocols and applications[J]. Procedia Computer Science, 2016, 80: 2042-2052. doi: 10.1016/j.procs.2016.05.524 [6] LEE J, PARK B. Development and evaluation of a cooperative vehicle intersection control algorithm under the connected vehicles environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 81-90. doi: 10.1109/TITS.2011.2178836 [7] LEE J, PARK B B, YUN I. Cumulative travel-time responsive real-time intersection control algorithm in the connected vehicle environment[J]. Journal of Transportation Engineering, 2013, 139(10): 1020-1029. doi: 10.1061/(ASCE)TE.1943-5436.0000587 [8] KAMAL M A S, IMURA J I, HAYAKAWA T, et al. A vehicle-intersection coordination scheme for smooth flows of traffic without using traffic lights[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(3): 1136-1147. doi: 10.1109/TITS.2014.2354380 [9] 王建强,吴剑,李洋. 基于人-车-路协同的行车风险场概念、原理及建模[J]. 中国公路学报,2016,29(1): 105-114. doi: 10.3969/j.issn.1001-7372.2016.01.014WANG Jianqiang, WU Jian, LI Yang. Concept, principle and modeling of driving risk field based on driver-vehicle-road interaction[J]. China Journal of Highway and Transport, 2016, 29(1): 105-114. doi: 10.3969/j.issn.1001-7372.2016.01.014 [10] NAKAOKA M, RAKSINCHAROENSAK P, NAGAI M S. Study on forward collision warning system adapted to driver characteristics and road environment[C]//2008 International Conference on Control, Automation and Systems. Seoul: IEEE, 2008: 2890-2895. [11] MATSUMI R, RAKSINCHAROENSAK P, NAGAI M S. Autonomous braking control system for pedestrian collision avoidance by using potential field[J]. IFAC Proceedings Volumes, 2013, 46(21): 328-334. doi: 10.3182/20130904-4-JP-2042.00064 [12] SATTEL T, BRANDT T. From robotics to automotive:lane-keeping and collision avoidance based on elastic bands[J]. Vehicle System Dynamics, 2008, 46(7): 597-619. doi: 10.1080/00423110701543452 [13] 吴剑. 考虑人-车-路因素的行车风险评价方法研究[D]. 北京: 清华大学, 2015. [14] 贺启才. 基于行车安全场理论的汽车避撞方法研究[D]. 重庆: 重庆理工大学, 2018. [15] 陈虹. 模型预测控制[M]. 北京: 科学出版社, 2013. [16] RAUT A, IRDMOUSA B K, SHAHBAKHTI M. Dynamic modeling and model predictive control of an RCCI engine[J]. Control Engineering Practice, 2018, 81: 129-144. doi: 10.1016/j.conengprac.2018.09.004 [17] LEE J. Assessing the potential benefits of IntelliDrive-based intersection control algorithms[D]. Charlattesville: University of Virginia, 2010 [18] PU L L, JOSHI R, ENERGY S. Surrogate safety assessment model (SSAM): software user manual [R/OL]. (2008-05-01)[2020-04-19]. https://rosap.ntl.bts.gov/view/dot/1008 [19] NOCEDAL J, WRIGHT S J. Numerical optimization [M]. New York: Springer-Verlag, 1999. [20] EUSUFF M M, LANSEY K E. Optimization of water distribution network design using the shuffled frog leaping algorithm[J]. Journal of Water Resources Planning and Management, 2003, 129(3): 210-225. doi: 10.1061/(ASCE)0733-9496(2003)129:3(210) [21] 赵亚东,吴其龙. 基于VisVAP的过饱和交叉口群自适应控制评价[J]. 电子科技,2016,29(3): 17-21.ZHAO Yadong, WU Qilong. Evaluation of oversaturated intersection group adaptive control based on VisVAP simulation[J]. Electronic Science and Technology, 2016, 29(3): 17-21. [22] RARAVI G, SHINGDE V, RAMAMRITHAM K, et al. Merge algorithms for intelligent vehicles[C]//Next Generation Design and Verification Methodologies for Distributed Embedded Control Systems. Dordrecht: Springer Netherlands, 2007: 51-65. [23] 叶雪梅,李雪松,蔡艳宁,等. 一种基于可靠最远转发的车载网广播协议[J]. 电子与信息学报,2016,38(5): 1219-1226.YE Xuemei, LI Xuesong, CAI Yanning, et al. A reliable most forward within radius scheme based broadcast protocol for vehicular ad-hoc networks[J]. Journal of Electronics & Information Technology, 2016, 38(5): 1219-1226. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 937
- HTML全文浏览量: 365
- PDF下载量: 89
- 被引次数: 0