

Track Curvature Characteristics and Vehicle Cornering Patterns on Hairpin Curves
-
摘要:
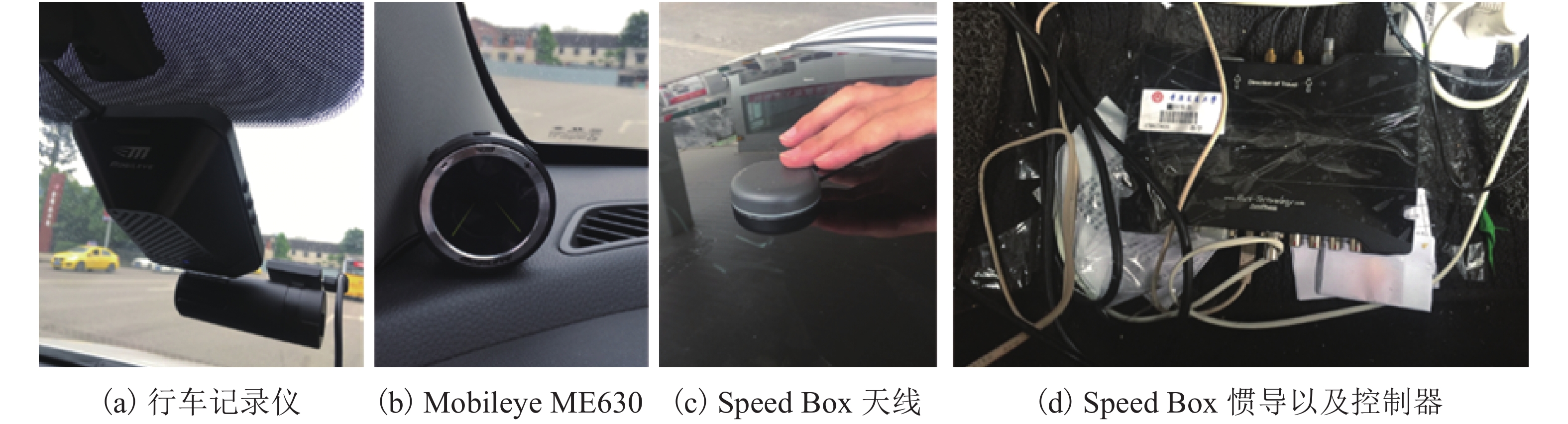
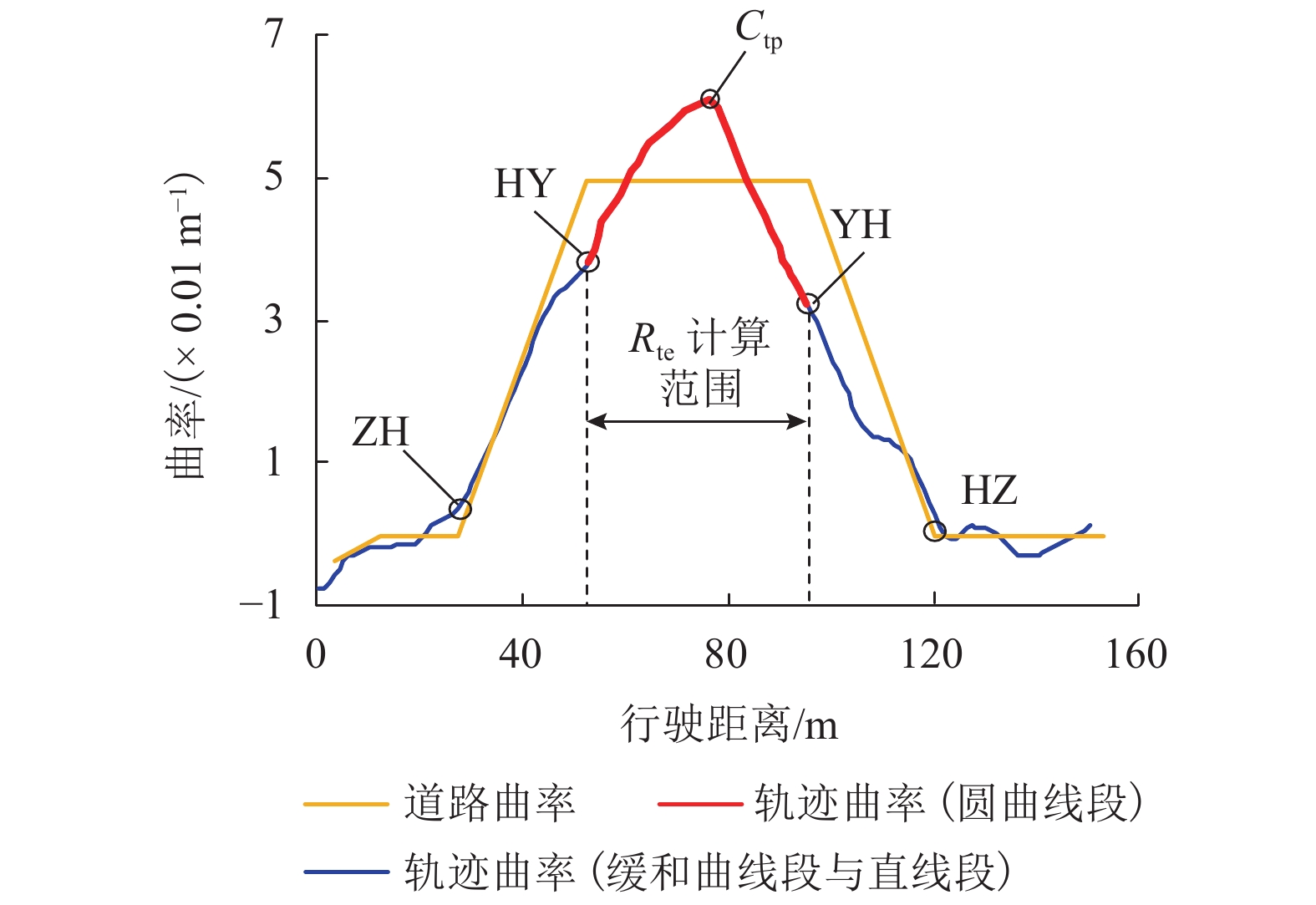
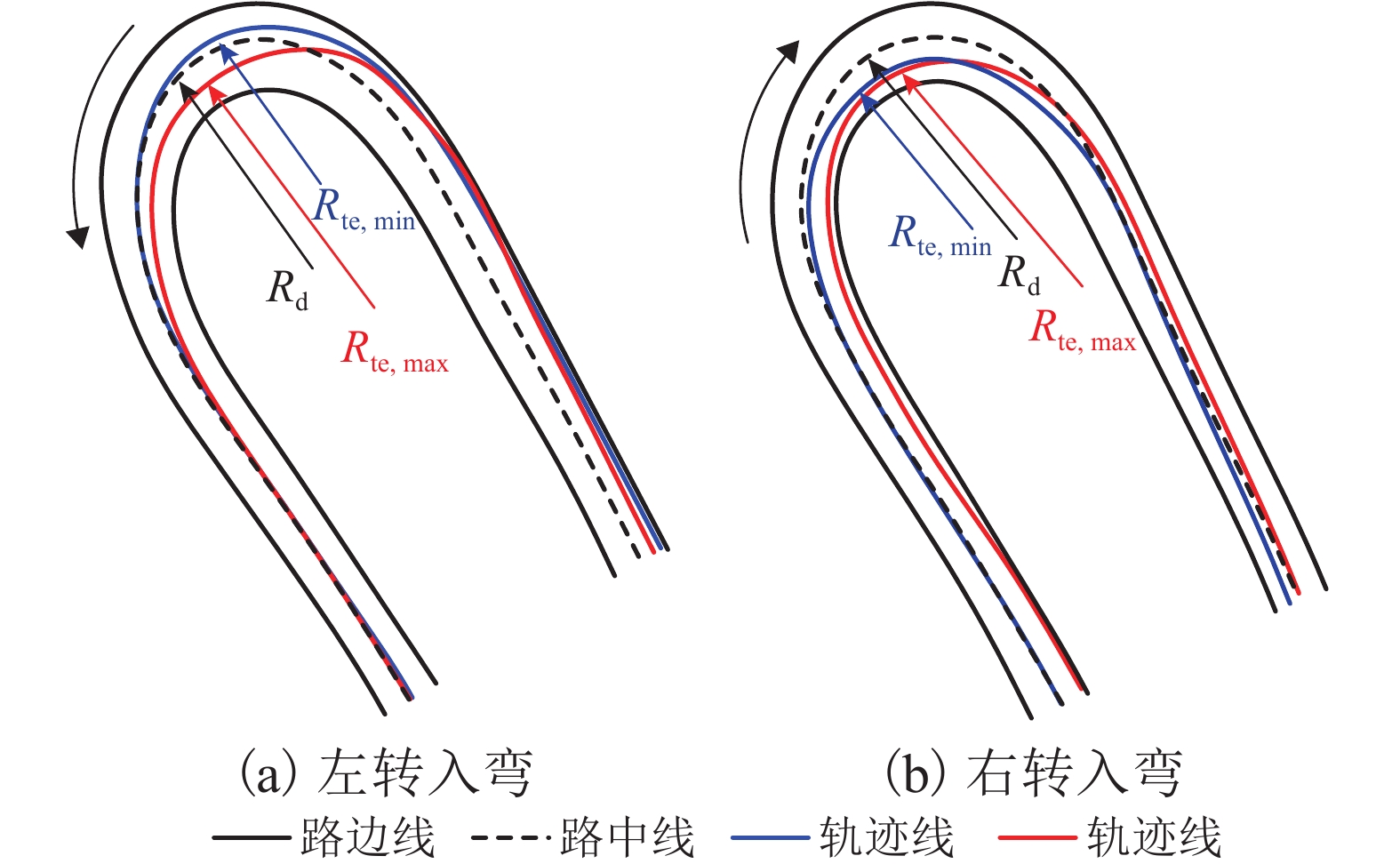
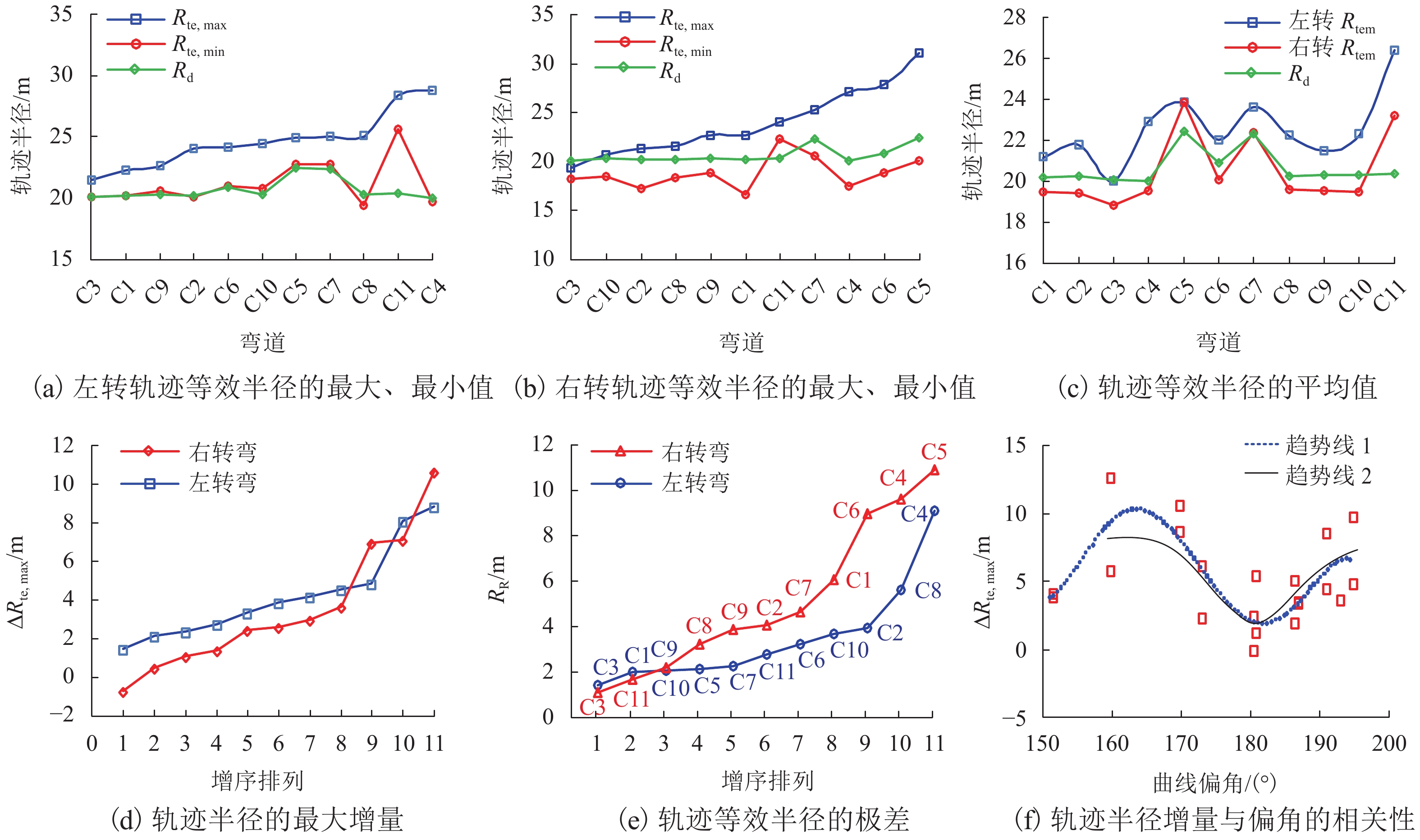
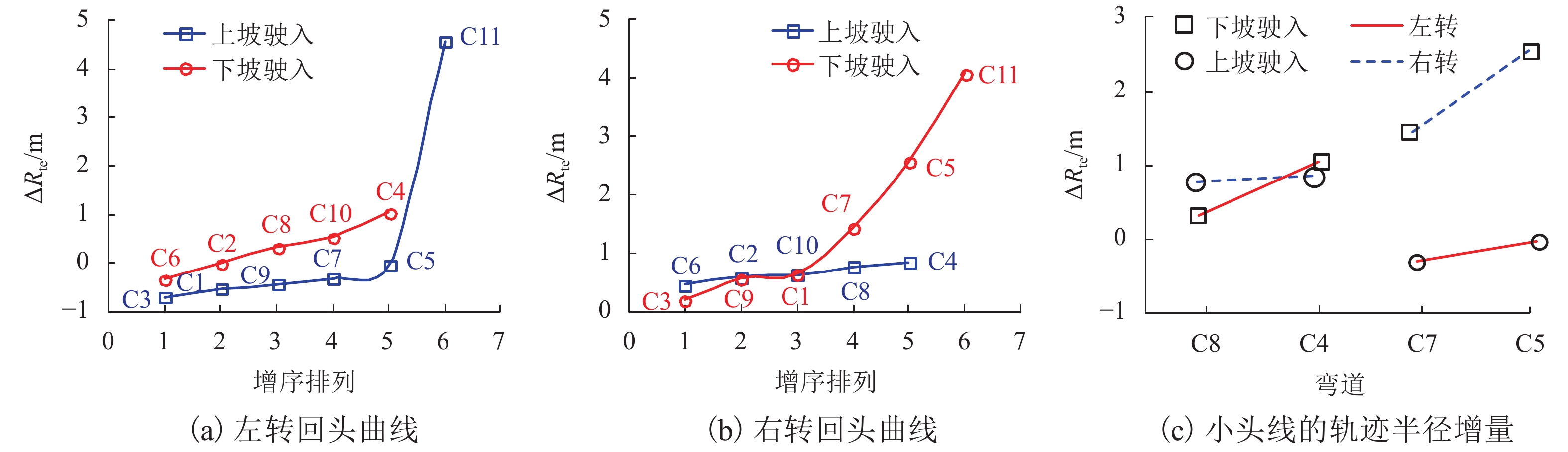
为了明确山区公路回头曲线上的车辆轨迹特性和驾驶行为偏好,通过实车路试采集了自然驾驶习惯条件下回头曲线路段上的车辆行驶轨迹线和轮迹线-车道线的横向距离等参数,基于实测数据计算了轨迹曲率,分析了轨迹曲率与道路设计曲率之间的关系,确定了轨迹曲率变化模式,提出了轨迹等效半径的概念,研究了回头曲线路段的切弯行为和典型过弯方式. 研究发现:1) 回头曲线的入弯、弯中和出弯均可见严重的车道偏离. 2) 入弯时汽车在缓和曲线之前便已进入曲线行驶状态,出弯时车辆轨迹曲率在驶出缓和曲线之后的直线上降低至0,轨迹曲率的变化率要低于缓和曲线的曲率变化率;左转轨迹的曲率变化率要低于右转轨迹的曲率变化率. 3) 左转轨迹曲率的幅值回头曲线中部低于或者接近道路设计曲率,右转轨迹曲率则高于道路设计曲率. 4) 左转弯的轨迹等效半径要高于弯道设计半径,右转弯轨迹半径最小值和均值普遍则低于设计半径. 5) 驾驶人可以通过不同的切弯方式来实现回头曲线路段轨迹半径的增加和最大化,但需要侵占对向车道. 6) 驾驶人切弯时,左转弯的轨迹半径增量要高于右转弯的轨迹率半径增量,即车辆左转驶入回头曲线是更容易取得切弯效用;在大头线、平头线和小头线(转角分别大于、等于和小于180°) 3类回头曲线中,小头线和大头线上的切弯效果更明显.
Abstract:To clarify the vehicle trajectory characteristics and driving behavior preference of hairpin curves of mountain roads, the vehicle trajectory and lateral distance between wheel track and lane marking on hairpin curves were collected in the condition of natural driving, the track curvature were calculated with the measured track data, the relationship between the track curvature and road design curvature were analyzed, and the changing mode of the track curvature was determined. Moreover, the concept of track equivalent radius was presented, and the cornering behavior and typical track patterns on hairpin curves were analyzed. It is found that 1) serious lateral deviation can be observed at entrance, middle and exit of a hairpin curve. 2) At the entrance of a hairpin curve, the vehicle has begun the state of curve driving before running on the transition section, and at the exit, the track curvature reduces to zero on a tangent after departing the transition section; the change rate of track curvature is lower than that of the transition. Gradient of the left-turn track is lower than that of the right-turn track. 3) The curvature of the left-turn track at the middle of the hairpin curve is lower than or close to the design curvature, while the curvature of the right-turn track is higher than the design curvature. 4) The equivalent radius of left-turn track is higher than the design radius of the hairpin curve, while the minimum and average equivalent radius of the right-turn track are generally lower than the design radius. 5) Drivers can increase and maximize the track radius with different cornering behaviors, but need to drive on the opposite lane. 6) When a driver cuts a corner, the increment in track radius of the left-turn curve is higher than that of the right-turn curve; namely, it is easier for a vehicle to turn left into the hairpin curve to cut a corner; of three types of hairpin curves, big, flat and small curves, which correspond to the deflection angles larger than 180°, equal to 180°, and less than 180°, the curves with the deflection angles larger and less than 180° lead to better vehicle cornering performance.
-
Key words:
- traffic safety /
- hairpin curves /
- track /
- track curvature /
- cornering behavior /
- road geometry
-

图 3 左转曲线路段的轨迹线束和轨迹曲率(大头线和平头线)
Figure 3. Tracks and curvatures on left-turn hairpin curves (deflection angle larger than 180o and equal to 180o)
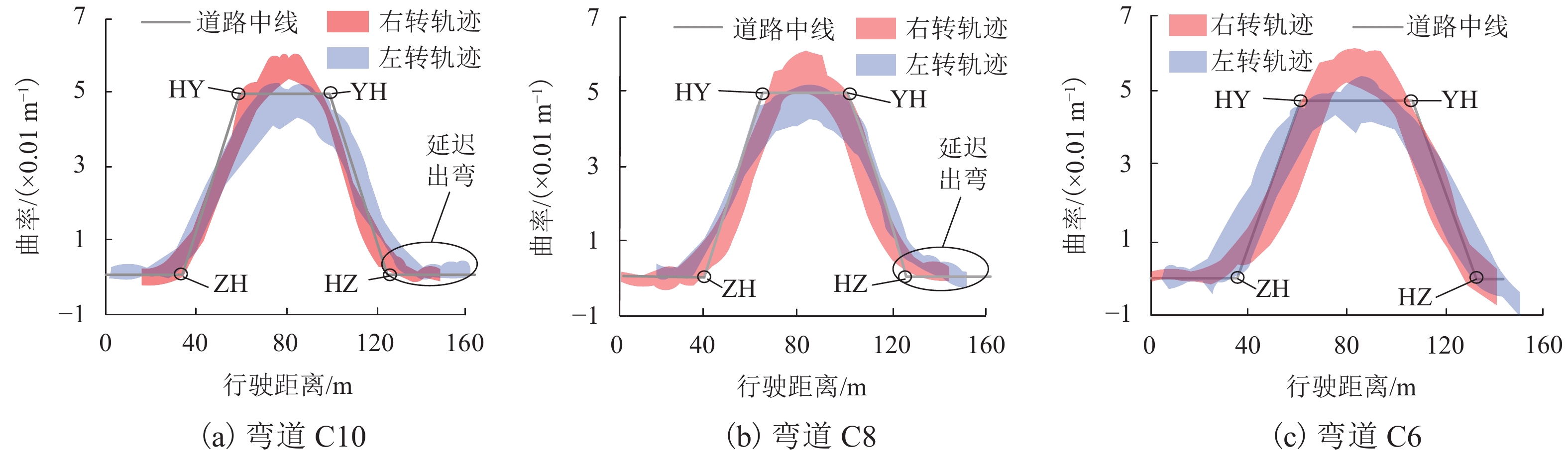
图 4 左转弯道和右转弯道轨迹曲率的一般性区别
Figure 4. General distinction in track curvature between left-turn and right-turn hairpin curves

图 9 行驶速度对回头曲线轨迹半径的影响
Figure 9. Effect of driving speed on track radius for hairpin curves
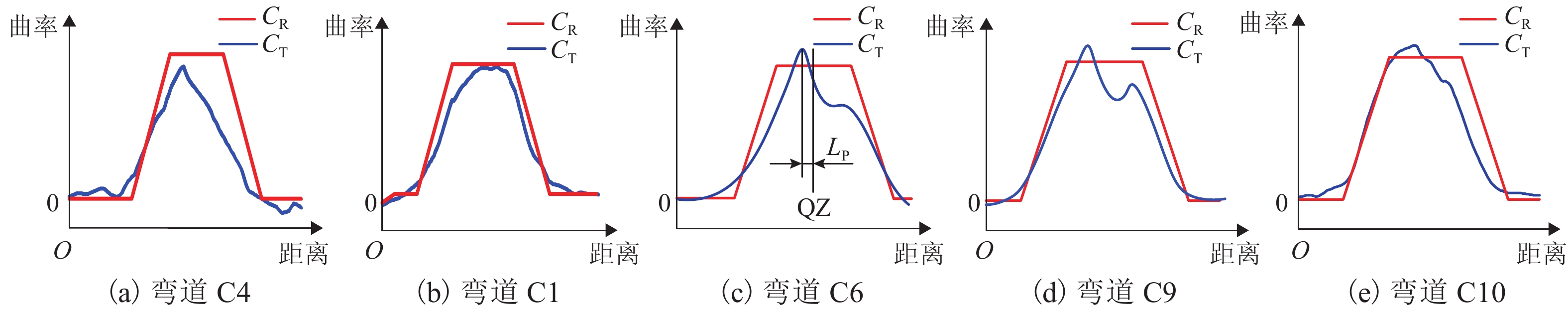
图 10 右转车辆轨迹等效半径最大值(Rte,max)对应的轨迹曲率
Figure 10. Track curvature profiles corresponding to maximum equivalent radius of right-turn vehicle track
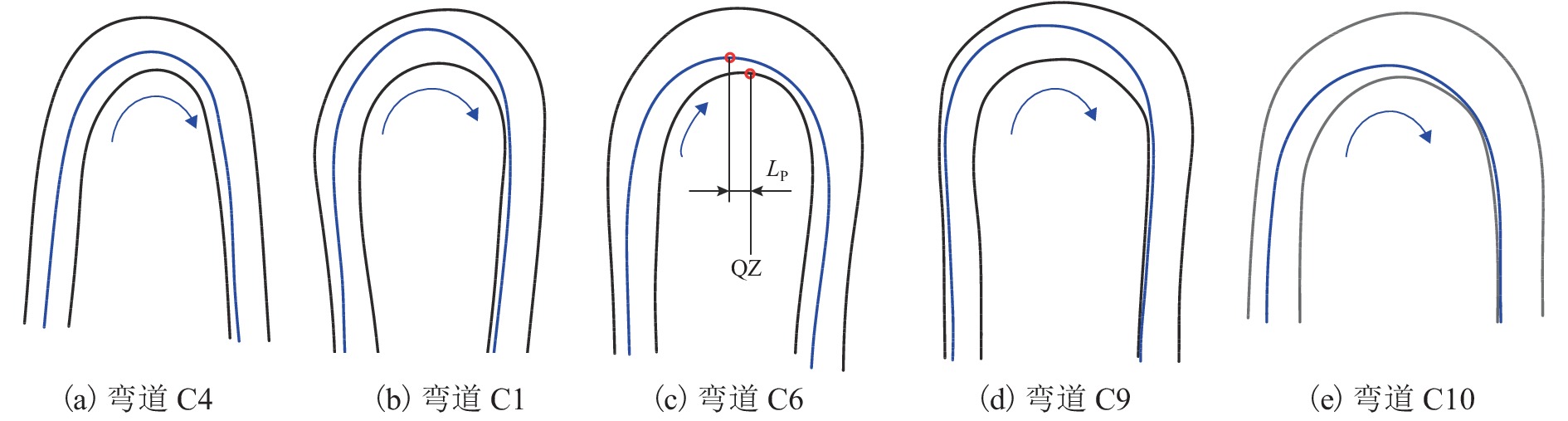
图 11 右转车辆轨迹等效半径最大值(Rte,max)对应的轨迹线
Figure 11. Tracks corresponding to maximum equivalent radius of right-turn vehicle track
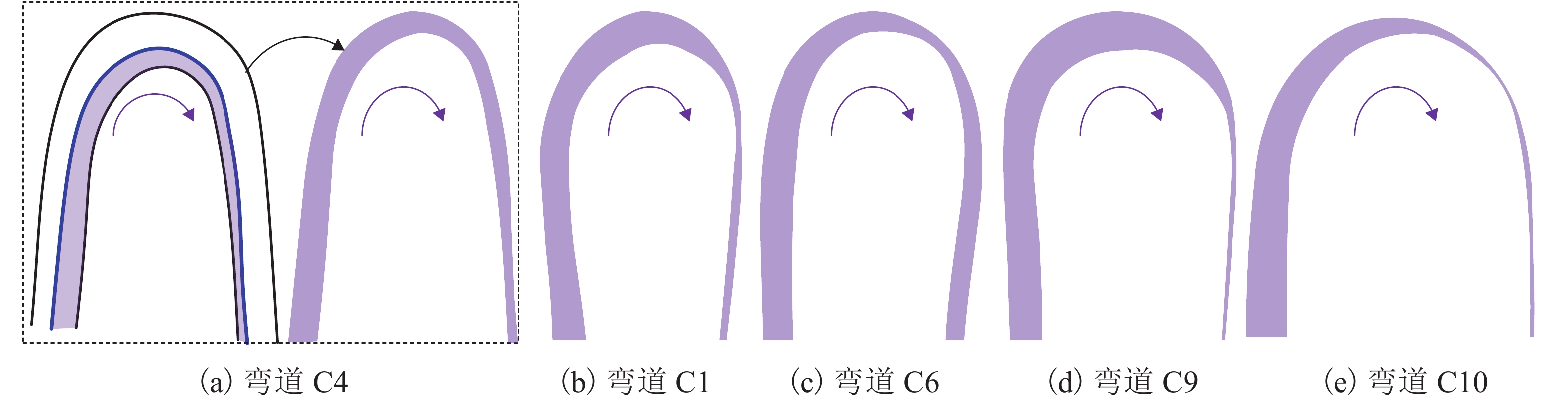
图 12 轨迹线-弯道内侧路缘线的包络区间
Figure 12. Envelope interval formed by tracks and inner kerb of curves
表 1 回头曲线的几何参数
Table 1. Geometric parameters of hairpin curves
弯道编号 半径/m 转角/(°) 曲线长度/m 缓和
曲线长/m坡度/% 弯前(弯后)
坡度/%弯中内侧(外侧)
车道宽/mC1 20.156 192.73 92.975 25.000 3.0 3.0 (9.0) 4.25 (4.25) C2 20.233 186.19 90.797 25.000 3.0 7.0 (9.0) 4.25 (4.25) C3 20.079 180.09 88.138 25.000 3.0 9.0 (9.0) 4.25 (4.25) C4 20.029 169.51 84.381 25.000 3.0 9.0 (9.0) 4.25 (4.25) C5 22.425 159.43 87.519 25.000 2.7 9.0 (5.5) 4.25 (4.25) C6 20.861 190.62 94.561 25.000 2.8 2.8 (9.0) 4.25 (4.25) C7 22.315 150.60 83.815 25.000 3.0 9.0 (9.0) 4.75 (3.55) C8 20.26 172.64 86.202 25.000 3.0 9.0 (7.5) 4.25 (4.25) C9 20.304 186.58 91.257 25.000 3.0 6.5 (9.0) 4.25 (4.25) C10 20.327 180.54 89.188 25.000 3.0 7.2 (9.0) 4.25 (4.25) C11 20.347 194.61 94.259 25.000 3.0 6.9 (8.5) 4.25 (4.25) 注:表1中第7列弯前坡度是指缓和曲线之前的直线路段坡度;行驶方向C1至C11,路线总体趋势为上坡.  下载: 导出CSV
下载: 导出CSV
-
[1] SUBIRATS P, GOYAT Y, JACOB B, et al. A new road safety indicator based on vehicle trajectory analysis[J]. Transportation Research Procedia, 2016, 14: 4267-4276. doi: 10.1016/j.trpro.2016.05.398 [2] GEMOU M. Transfer ability of driver speed and lateral deviation measurable performance from semi-dynamic driving simulator to real traffic conditions[J]. European Transport Research Review, 2013, 5(4): 217-233. doi: 10.1007/s12544-013-0105-1 [3] ROSEY F, AUBERLET J M. Trajectory variability:road geometry difficulty indicator[J]. Safety Science, 2012, 50(9): 1818-1828. doi: 10.1016/j.ssci.2012.04.003 [4] FITZSIMMONS E J, NAMBISAN S S, SOULEYRETTE R R, et al. Analyses of vehicle trajectories and speed profiles along horizontal curves[J]. Journal of Transportation Safety & Security, 2013, 5(3): 187-207. [5] FITZSIMMONS E J, KVAM V, SOULEYRETTE R R, et al. Determining vehicle operating speed and lateral position along horizontal curves using linear mixed-effects models[J]. Traffic Injury Prevention, 2013, 14(3): 309-321. doi: 10.1080/15389588.2012.701356 [6] BLANA E, GOLIAS J. Differences between vehicle lateral displacement on the road and in a fixed-base simulator[J]. Human Factors:The Journal of the Human Factors and Ergonomics Society, 2002, 44(2): 303-313. doi: 10.1518/0018720024497899 [7] ST-AUBIN P, SAUNIER N, MIRANDA-MORENO L. Large-scale automated proactive road safety analysis using video data[J]. Transportation Research Part C:Emerging Technologies, 2015, 58: 363-379. doi: 10.1016/j.trc.2015.04.007 [8] ZAKI M H, SAYED T. A framework for automated road-users classification using movement trajectories[J]. Transportation Research Part C:Emerging Technologies, 2013, 33: 50-73. doi: 10.1016/j.trc.2013.04.007 [9] 符锌砂,何石坚,杜锦涛,等. 线形空间几何突变对曲线路段车道偏移的影响[J]. 中国公路学报,2019,32(12): 106-114.FU Xinsha, HE Shijian, DU Jintao, et al. Effects of spatial geometric mutation of highway alignments on lane departure at curved sections[J]. China Journal of Highway and Transport, 2019, 32(12): 106-114. [10] 林慧,郭建钢,陈金山,等. 双车道山区公路反向连续弯道危险区域研究[J]. 中国安全科学学报,2017,27(8): 138-143.LIN Hui, GUO Jiangang, CHEN Jinshan, et al. Identification of dangerous sections of reverse continuous curve of two-lane mountain highway[J]. China Safety Science Journal, 2017, 27(8): 138-143. [11] 丁传鑫. 双车道公路平曲线对车辆行驶轨迹的影响研究[D]. 淮南: 安徽理工大学, 2014. [12] SPACEK P. Track behavior in curve areas:attempt at typology[J]. Journal of Transportation Engineering, 2005, 131(9): 669-676. doi: 10.1061/(ASCE)0733-947X(2005)131:9(669) [13] 徐进,罗骁,张凯,等. 基于自然驾驶试验的山区公路汽车行驶轨迹特性研究[J]. 中国公路学报,2016,29(7): 38-51. doi: 10.3969/j.issn.1001-7372.2016.07.006XU Jin, LUO Xiao, ZHANG Kai, et al. Investigation on characteristics of vehicle travelling tracks on mountain highways based on natural driving tests[J]. China Journal of Highway and Transport, 2016, 29(7): 38-51. doi: 10.3969/j.issn.1001-7372.2016.07.006 [14] 邓天民,罗骁,邵毅明,等. 山区公路曲线路段汽车轨迹模式与切弯行为[J]. 东南大学学报(自然科学版),2019,49(2): 388-396.DENG Tianmin, LUO Xiao, SHAO Yiming, et al. Track patterns and curve cutting behavior on curved sections of mountain roads[J]. Journal of Southeast University (Natural Science Edition), 2019, 49(2): 388-396. [15] 徐进,李建兴,林伟,崔强,吴国雄,杨奎. 螺旋匝道(桥)小客车横向行驶特性实测研究[J]. 西南交通大学学报,2019,54(6): 1129-1138.XU Jin, LI Jianxing, LIN Wei, et al. Field tests on lateral operational characteristics of passenger cars on helical ramps (bridges)[J]. Journal of Southwest Jiaotong University, 2019, 54(6): 1129-1138. [16] 王志聪. 山区低等级公路同向连续弯道车辆行驶轨迹研究[D]. 福州: 福建农林大学, 2017. [17] CERNI G, BASSANI M. Naturalistic driving data collection to investigate into the effects of road geometrics on track behaviour[J]. Transportation Research Part C:Emerging Technologies, 2017, 77: 1-15. doi: 10.1016/j.trc.2017.01.012 [18] BELLA F. Driver perception of roadside configurations on two-lane rural roads:effects on speed and lateral placement[J]. Accident Analysis and Prevention, 2013, 50: 251-262. doi: 10.1016/j.aap.2012.04.015 -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 965
- HTML全文浏览量: 653
- PDF下载量: 35
- 被引次数: 0