

Optimal Siting and Sizing forInverter Feedback Devices Applied in Urban Rail Transit
-
摘要:
以节省逆变回馈装置投资成本和提高再生制动能量利用率为目标,建立了城轨牵引供电系统逆变回馈装置定容选址优化模型. 将考虑逆变回馈装置周期性间歇工作制的城轨牵引供电系统交直流混合潮流算法与带精英策略的快速非支配排序遗传算法(fast non-dominated sorting genetic algorithm Ⅱ,fast NSGA-Ⅱ)相结合,求解多目标函数的Pareto解集;并采用基于信息熵的序数偏好法(technique for order preference by similarity to ideal solution,TOPSIS)筛选逆变回馈装置定容选址的最优方案. 以广州地铁某线路为算例进行仿真验证,结果表明:优化方案相对该地铁工程实际逆变回馈装置配置方案,其装置投资成本节省70万元,系统级节能率提高3.25%,投资回报周期相应缩短.
Abstract:A multi-objective optimization model of siting and sizing of inverter feedback devices is established with an objective of saving the investment cost of inverter feedback devices and improving the utilization rate of regenerative braking energy. The AC-DC hybrid power flow algorithm that involves the intermittent work cycle of the inverter feedback device and the fast non-dominated sorting genetic algorithm Ⅱ (fast NSGA-Ⅱ) are combined to solve the Pareto solution set. The entropy-based technique for order preference by similarity to ideal solution (TOPSIS) is adopted to select the optimal site of the inverter feedback device. Cases with a metro line in Guangzhou were studied to compare the optimal solution with the actual configuration scheme of the inverter feedback device, showing that the optimal solution saved 700, 000 yuan of investment cost, increased the system level energy saving rate by 3.25%, and shortened the investment return period.
-
Key words:
- traction power supply system /
- inverter feedback device /
- optimal design /
- genetic algorithm /
- entropy
-
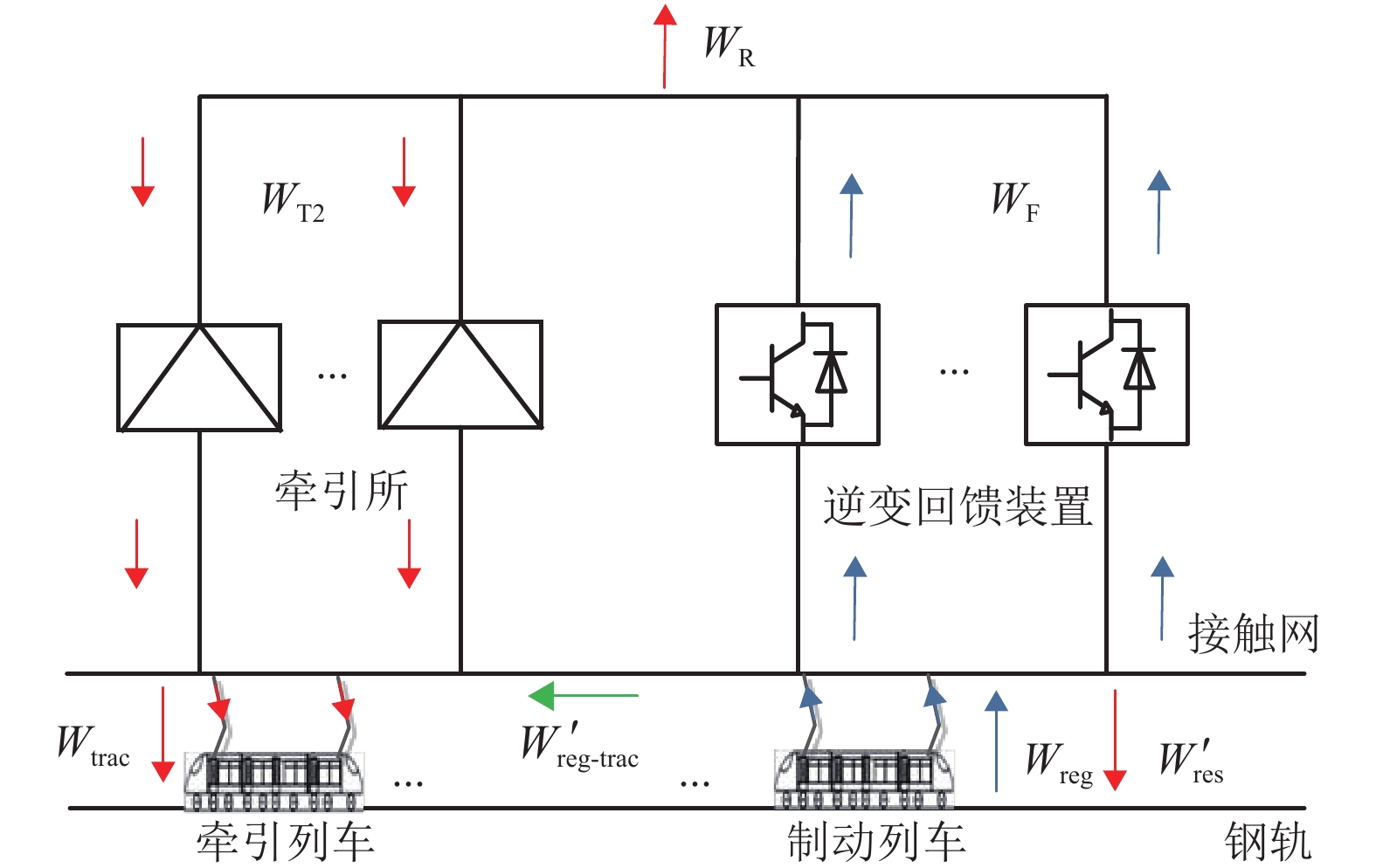
图 2 安装逆变回馈装置的系统能量流向示意
Figure 2. Energy flow direction for installation of inverter feedback devices
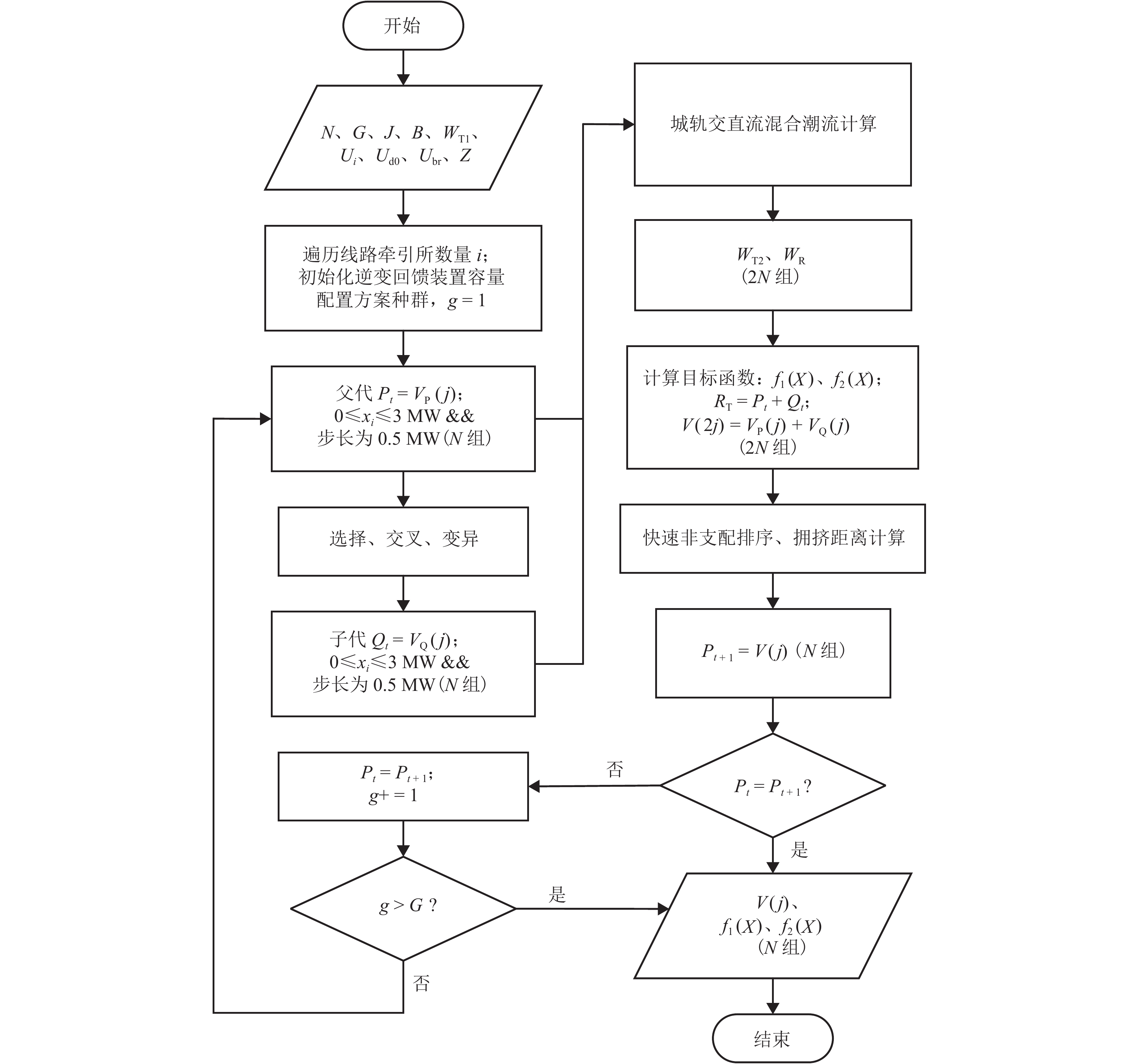
图 4 基于NSGA-Ⅱ求解逆变回馈装置容量配置优化流程
Figure 4. Optimization process of siting and sizing for inverter feedback devices based on NSGA-Ⅱ algorithm
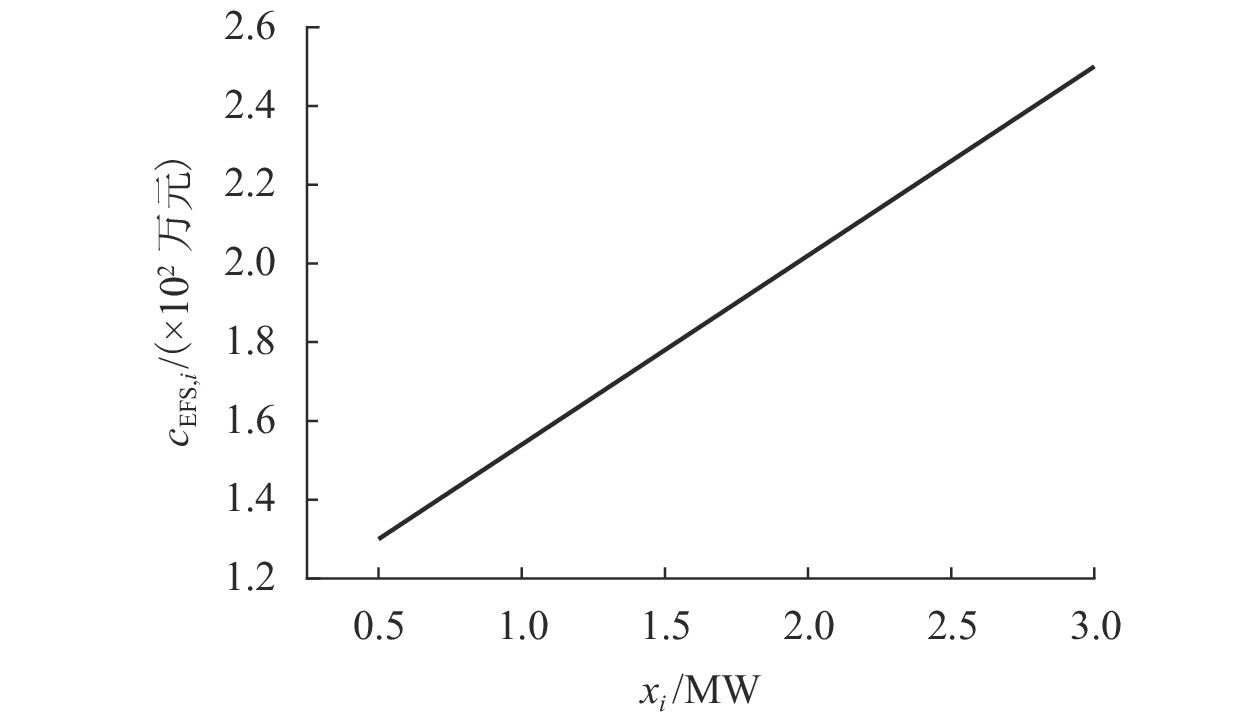
图 6 逆变回馈装置价格与容量关系
Figure 6. Relationship between price and capacity of inverter feedback devices
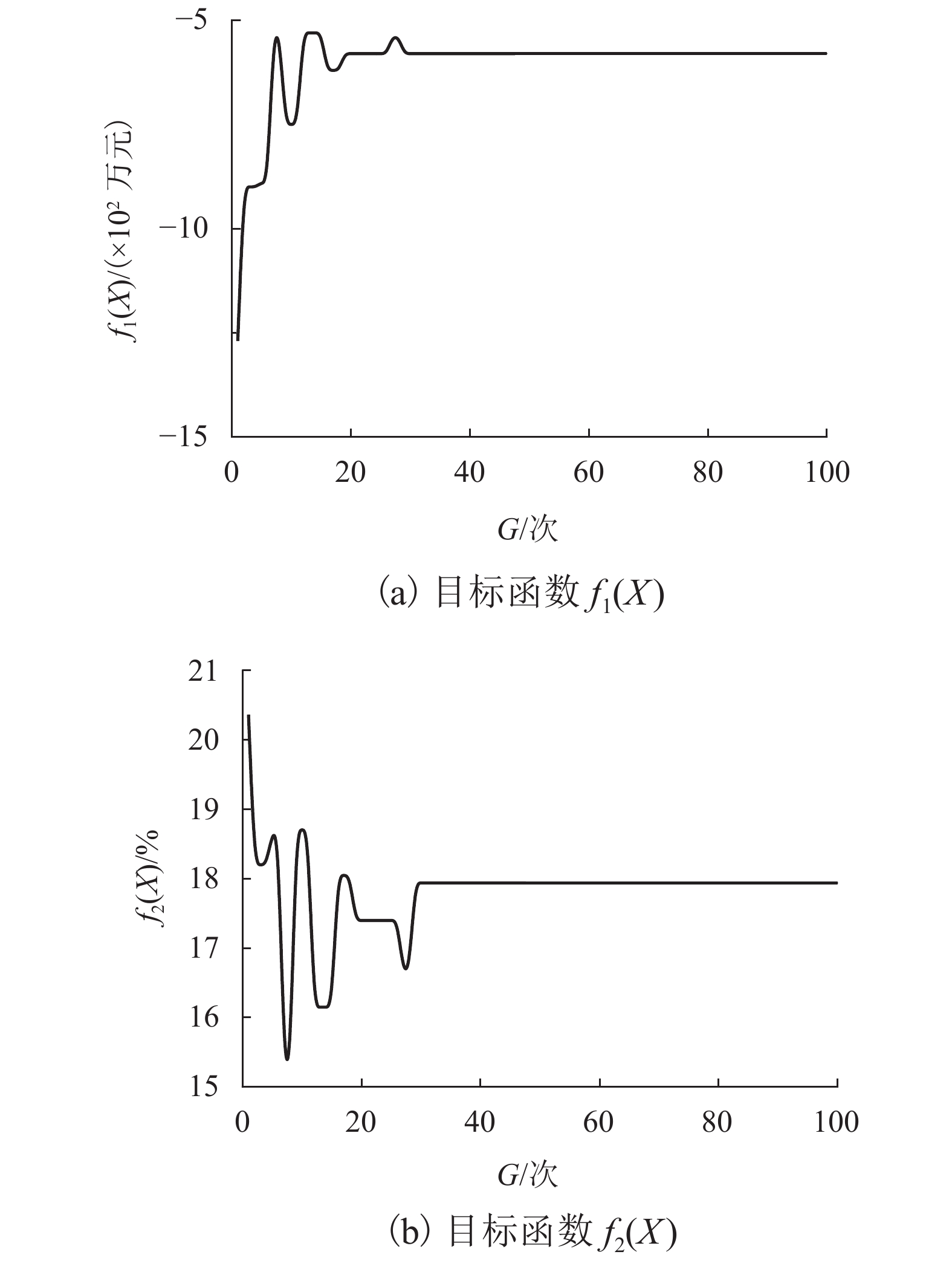
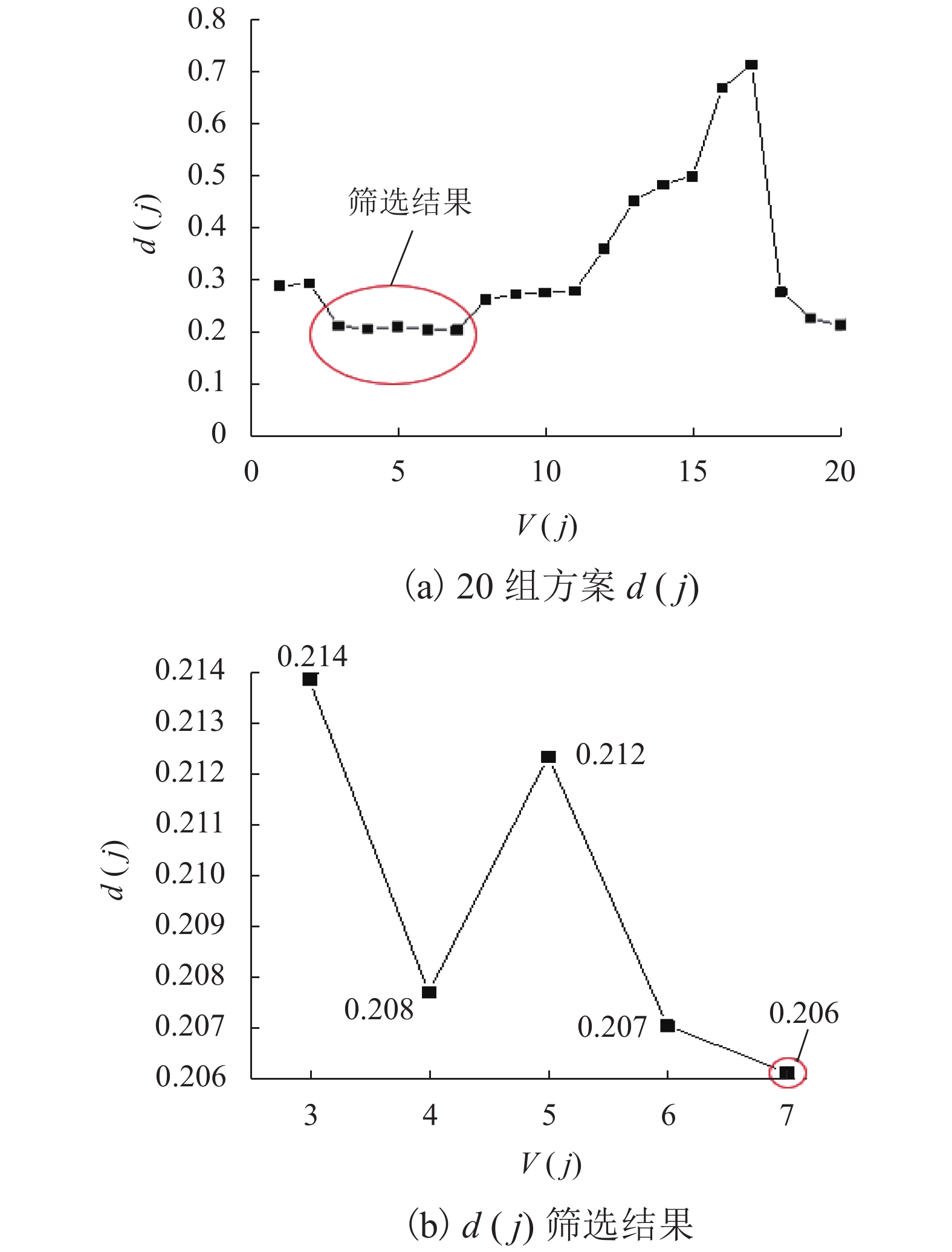
图 7 目标函数Pareto解集的最优方案变化过程
Figure 7. Change process of optimal scheme of Pareto solution set
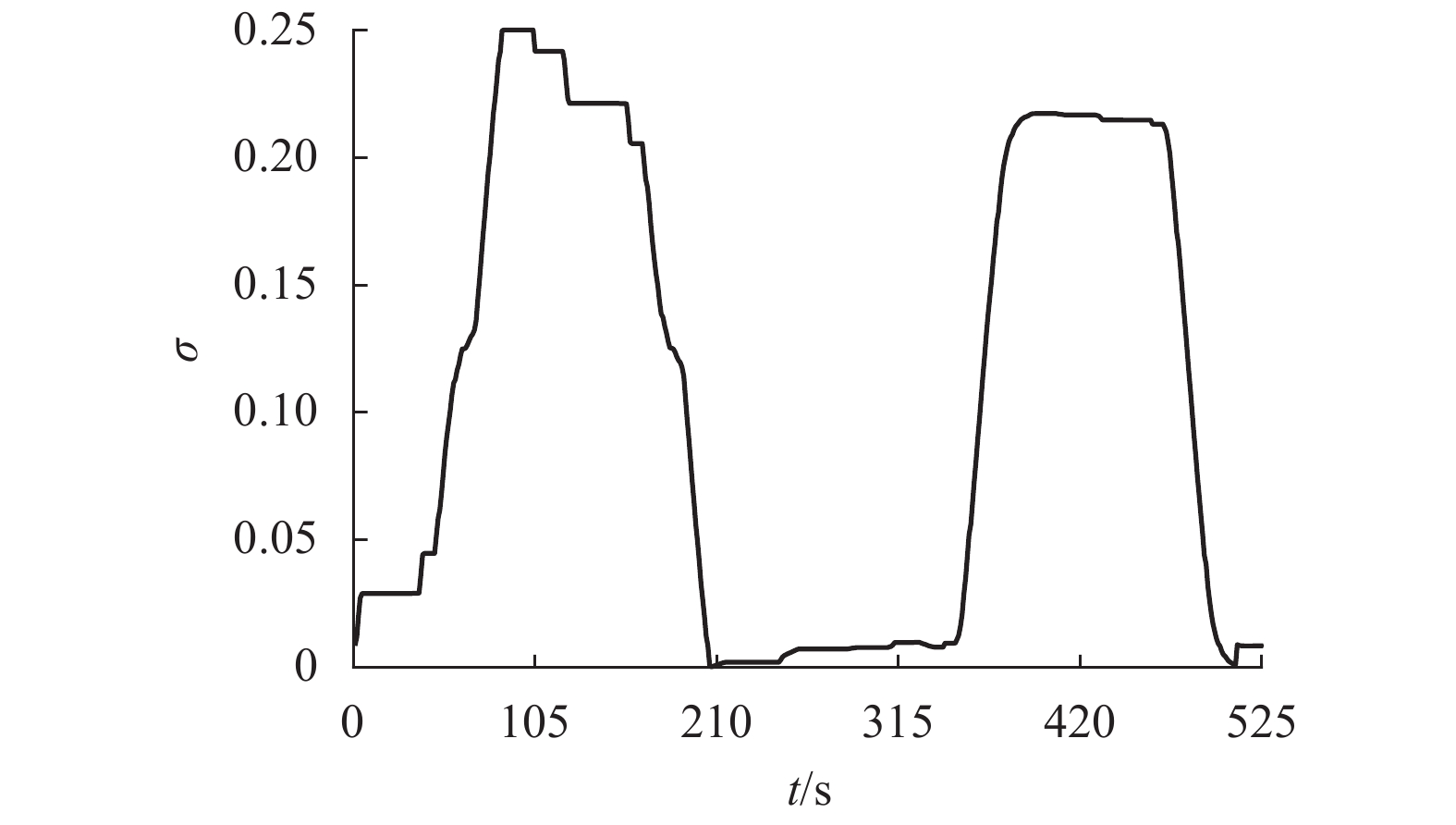
图 10 区间所2逆变回馈装置工作占空比
Figure 10. Operating duty ratio of inverter feedback devices in section traction station 2
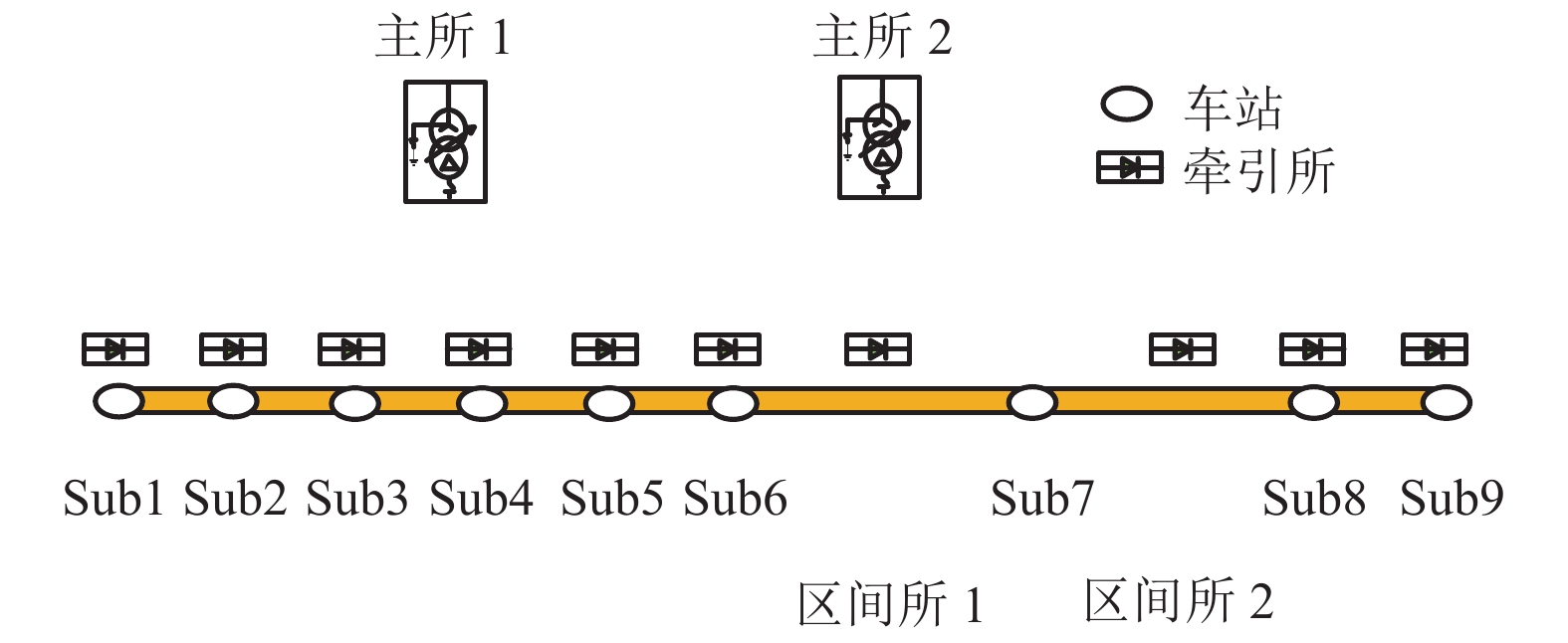
表 1 牵引所位置信息
Table 1. Traction station position information
牵引所 位置/km 牵引所 位置/km Sub1 0.243 Sub6 13.900 Sub2 2.456 区间所 1 16.287 Sub3 4.568 区间所 2 20.527 Sub4 7.804 Sub8 23.322 Sub5 10.670 Sub9 25.685  下载: 导出CSV
下载: 导出CSV
表 2 仿真参数设置
Table 2. Simulation parameter setting
仿真参数 取值 仿真参数 取值 N 20 Z/MW 2×2.5 J 0.9 Ud0/V 1680 B 0.1 xmax/MW 3 G/次 100 Ui/V 1720 WT1/(kW•h) 3954.17 Ubr/V 1830
下载: 导出CSV
表 3 Pareto解集收敛结果
Table 3. Convergence results of Pareto solution set
V(j) f1(X)/
(×102 万元)f2(X)/% V(j) f1(X)/
(×102 万元)f2(X)/% 1 −3.30 9.54 11 −7.30 19.81 2 −3.60 9.55 12 −8.60 20.28 3 −4.00 14.03 13 −10.10 20.46 4 −4.20 14.53 14 −10.70 20.86 5 −5.30 16.15 15 −11.10 21.48 6 −5.40 16.66 16 −14.90 21.68 7 −5.80 17.94 17 −16.80 21.7 8 −6.70 17.79 18 −6.90 17.61 9 −6.90 17.95 19 −6.20 18.05 10 −7.10 18.85 20 −5.80 17.39
下载: 导出CSV
表 5 逆变回馈装置方案对比
Table 5. Scheme comparison of inverter feedback devices
MW 牵引所 V(7),Va 牵引所 V(7),Va Sub1 0,2.0 Sub6 0,0 Sub2 2.0,0 区间所 1 0,0 Sub3 0,0 区间所 2 2.0,0 Sub4 1.5,0 Sub8 0,2.0 Sub5 0,0 Sub9 0,3.0
下载: 导出CSV
表 6 不同优化方案目标函数值对比
Table 6. Comparison of objective function values of different optimization schemes
优化方案 f1(X)/(×102万元) f2(X)/% V(7) 5.80 17.94 Va 6.50 14.69
下载: 导出CSV
表 4 最优方案V(7)每小时潮流计算结果
Table 4. Hourly power flow calculated by optimal scheme V(7)
kW•h 牵引所 WT2 WF WR Sub1 275.97 0 45.66 Sub2 459.14 270.84 Sub3 499.08 0 Sub4 501.06 238.75 Sub5 473.03 0 Sub6 292.77 0 区间所 1 321.41 0 区间所 2 462.30 273.07 Sub8 416.51 0 Sub9 280.59 0 合计 3981.86 782.66 45.66
下载: 导出CSV
-
[1] 许爱国,谢少军,姚远,等. 基于超级电容的城市轨道交通车辆再生制动能量吸收系统[J]. 电工技术学报,2010,25(3): 117-123.XU Aiguo, XIE Shaojun, YAO Yuan, et al. Regenerative braking energy absorption system for urban rail transit vehicles based on supercapacitor[J]. Transactions of China Electrotechnical Society, 2010, 25(3): 117-123. [2] ZHANG G, TIAN Z, TRICOLI P, et al. Inverter operating characteristics optimization for DC traction power supply systems[J]. IEEE Transactions on Vehicular Technology, 2019, 68(4): 3400-3410. doi: 10.1109/TVT.2019.2899165 [3] 步兵,滕昌敏,陈尔超,等. 城市轨道交通多车协作节能控制方法研究[J]. 铁道学报,2018,250(8): 47-55.BU Bing, TENG Changmin, CHEN Erchao, et al. Research on multi-vehicle cooperative energy saving control method in urban rail transit[J]. Journal of the China Railway Society, 2018, 250(8): 47-55. [4] TIAN Z, ZHANG G, ZHAO N, et al. Energy evaluation for DC railway systems with inverting substations[C]//IEEE International Conference on Electrical Systems for Aircraft. Nottingham: IEEE, 2018: 1-6. [5] 张驰,谭南林,刘敏杰,等. 地铁再生制动系统仿真及节能优化研究[J]. 中国铁道科学,2019,40(3): 112-118.ZHANG Chi, TAN Nanlin, LIU Minjie, et al. Simulation and energy-saving optimization of regenerative braking system in subway[J]. China Railway Science, 2019, 40(3): 112-118. [6] 陈怀鑫,杨中平,林飞,等. 基于遗传算法的城轨交通超级电容储能装置能量管理和容量配置优化研究[J]. 铁道学报,2019,41(9): 59-66.CHEN Huaixin, YANG Zhongping, LIN Fei, et al. Research on energy management and capacity allocation optimization of urban rail transit ultracapacitor energy storage device based on genetic algorithm[J]. Journal of the China Railway Society, 2019, 41(9): 59-66. [7] 诸斐琴,杨中平,林飞,等. 城轨交通牵引供电系统参数与储能系统容量配置综合优化[J]. 电工技术学报,2019,34(3): 579-588.ZHU Feiqin, YANG Zhongping, LIN Fei, et al. Comprehensive optimization of power supply system parameters and energy storage system capacity configuration in urban rail transit[J]. Transactions of China Electrotechnical Society, 2019, 34(3): 579-588. [8] 王一,程浩忠. 计及输电阻塞的帕累托最优多目标电网规划[J]. 中国电机工程学报,2008,28(13): 132-138.WANG Yi, CHENG Haozhong. Pareto optimal multi-objective power grid planning considering transmission congestion[J]. Chinese Journal of Electrical Engineering, 2008, 28(13): 132-138. [9] 吴广宁,付龙海,王颢,等. 基于改进遗传算法的接地网优化设计[J]. 西南交通大学学报,2007,42(2): 169-174.WU Guangning, FU Longhai, WANG Hao, et al. Optimal design of ground grid based on improved genetic algorithm[J]. Journal of Southwest Jiaotong University, 2007, 42(2): 169-174. [10] DEB K, PRATAP A, AGARWAL S, et al. A fast and elitist multiobjective genetic algorithm:NSGA-Ⅱ[J]. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 190-197. [11] 冯士刚,艾芊. 带精英策略的快速非支配排序遗传算法在多目标无功优化中的应用[J]. 电工技术学报,2007,22(12): 146-151.FENG Shigang, AI Qian. Application of fast non-dominant sorting genetic algorithm with elite strategy in multi-objective reactive power optimization[J]. Transactions of China Electrotechnical Society, 2007, 22(12): 146-151. [12] SHI X, FANG H, PI G, et al. Time-Energy-Jerk dynamic optimal trajectory planning for manipulators based on quantic NURBS[C]//2018 3rd International Conference on Robotics and Automation Engineering (ICRAE). Guangzhou: IEEE, 2018: 44-49. [13] 国家市场监督管理总局, 中国国家标准化管理委员会. 城市轨道交通再生制动能量吸收逆变装置: GB/T 37423—2019[S]. 北京: 中国质检出版社, 2019. [14] 刘炜,许伶俐,廖钧,等. 含逆变回馈装置的城市轨道交直流混合潮流计[J]. 铁道学报,2019,41(11): 65-71.LIU Wei, XU Lingli, LIAO Jun, et al. Calculation of AC-DC hybrid power flow in urban rail with inverter feedback device[J]. Journal of the China Railway Society, 2019, 41(11): 65-71. [15] 刘炜,张扬鑫,张戬,等. 考虑牵引所多运行状态的城轨交直流供电计算[J]. 西南交通大学学报,2019,55(6): 1163-1170.LIU Wei, ZHANG Yangxin, ZHANG Jian, et al. Calculation of ac-dc power supply for urban rail considering multiple operating conditions of traction institute[J]. Journal of Southwest Jiaotong University, 2019, 55(6): 1163-1170. [16] 刘炜,娄颖,张戬,等. 计及城市轨道逆变回馈装置的交直流统一供电计算[J]. 电工技术学报,2019,34(20): 4381-4391.LIU Wei, LOU Ying, ZHANG Jian, et al. Calculation of AC and DC unified power supply considering urban rail inverter feedback device[J]. Journal of Electrical Technology, 2019, 34(20): 4381-4391. [17] 郭耀煌,郭春香,郭强. 基于偏序结构相似度的多准则决策[J]. 西南交通大学学报,2006,41(1): 1-6.GUO Yaohuang, GUO Chunxiang, GUO Qiang. Multi-criteria decision making based on similarity of partial order structure[J]. Journal of Southwest Jiaotong University, 2006, 41(1): 1-6. [18] 吴小刚,刘宗歧,田立亭,等. 基于改进多目标粒子群算法的配电网储能选址定容[J]. 电网技术,2014,38(12): 3405-3411.WU Xiaogang, LIU Zongqi, TIAN Liting, et al. Energy storage site selection and capacity determination of distribution network based on improved multi-objective particle swarm optimization[J]. Power System Technology, 2014, 38(12): 3405-3411. [19] CHEN Pengyu. Effects of normalization on the entropy-based TOPSIS method[J]. Expert Systems With Applications, 2019, 136(12): 33-41. -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 736
- HTML全文浏览量: 352
- PDF下载量: 26
- 被引次数: 0