

Impact of Autonomous Vehicle on Travel Mode Choice Behavior
-
摘要:
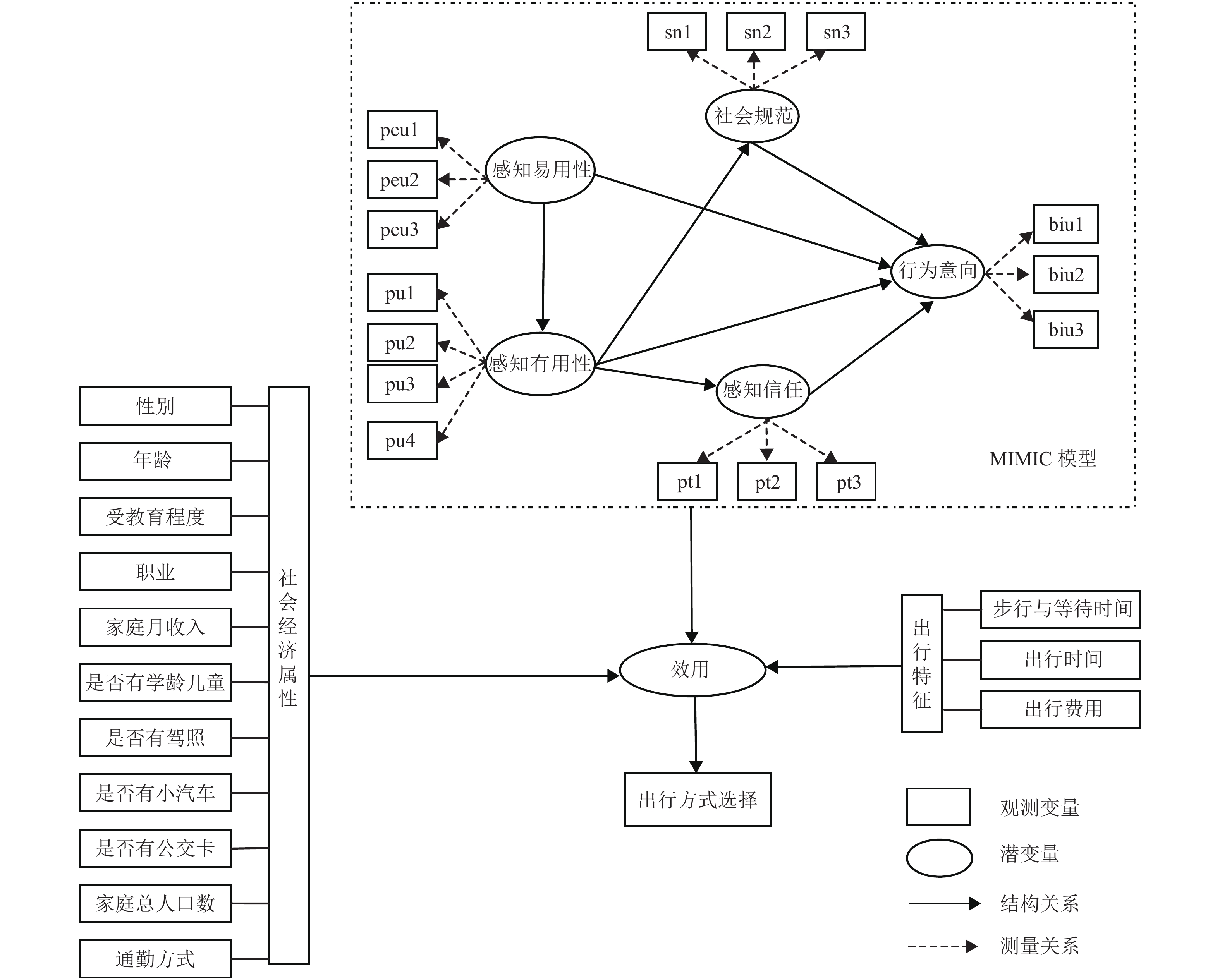
无人驾驶汽车对出行者出行选择行为具有重要影响,进而可以影响到城市交通需求、城市空间布局和城市规划. 基于扩展技术接受模型和考虑不同出行者偏好的异质性,建立带潜变量的随机系数Logit模型,研究出行者的出行特征、心理潜变量和个体的社会经济属性对无人驾驶汽车选择行为的影响. 结果表明:与传统的多项Logit模型相比,带潜变量的随机系数Logit模型拟合度更高;不同的出行者对出行费用的偏好具有异质性,在效用函数中,出行费用服从正态分布;无人驾驶汽车选择行为不仅受到出行特征和社会经济属性的影响,而且还受到感知信任、社会规范和行为意向等心理潜变量的影响;降低无人驾驶汽车的出行费用可以提升出行者选择无人驾驶汽车出行的概率.
Abstract:Autonomous vehicles have an important influence on travel mode choices of travelers, which can affect urban traffic demand, urban spatial layout and urban planning. Based on the extended technology acceptance model and the heterogeneity of different travelers’ preferences, a random parameter Logit model (RPLM) with latent variables is established to study the impact of travel characteristics, psychological latent variables and individual socio-economic attributes on the travelers’ behavior of choosing autonomous vehicles. The results show that, RPLM has a better fitting degree than the traditional multiple Logit model. Different travelers have heterogeneous preferences for travel cost, and the travel cost follows a normal distribution in the utility function. Travelers’ choice behavior of autonomous vehicles is not only affected by travel characteristics and socioeconomic attributes, but also by psychological latent variables, such as perceived trust, social norms and behavioral intention. Reducing the travel cost of autonomous vehicle can significantly increase the probability that travelers choose autonomous vehicle.
-
表 1 SP情景示例
Table 1. Example of SP scenario
选项 步行与等待时间/min 出行时
间/min出行费
用/元私人无人驾驶汽车 3 33 24 共享无人驾驶汽车 8 24 29 传统小汽车 5 29 36  下载: 导出CSV
下载: 导出CSV
表 2 样本描述性统计
Table 2. Descriptive statistics of samples
变量 定义 表示符号 百分比/% 性别 女 GEND 45.73 男 54.27 年龄 ≤ 30 岁 AGE1 34.47 31~45 岁 AGE2 28.75 46~55 岁 AGE3 26.85 ≥ 56 岁 AGE4 9.92 受教育程度 高中及以下 EDU1 12.69 大专 EDU2 12.52 本科 EDU3 60.24 硕士及以上 EDU4 14.54 职业 公务员/事业
单位人员OCCU 1 28.47 企业员工 OCCU2 26.62 个体经营/自由职业 OCCU3 21.70 其他(兼职、学生、
退休等)OCCU4 23.22 家庭月收入 < 5000 元 HINC1 24.47 5000~10000 元 HINC2 41.83 10000~20000 元 HINC3 21.93 > 20000 元 HINC4 11.77 是否有学龄儿童 是 CHILD 50.55 否 49.45 是否有驾照 是 LICENSE 50.78 否 49.22 家庭是否有小汽车 是 CAR 64.92 否 35.08 是否有公交IC卡 是 ICARD 77.55 否 22.45 是否使用小汽车通勤 是 CAR2WORK 62.60 否 67.40 家庭总人口 1 人 HSIZE 6.92 2 人 9.46 3 人 43.22 4 人 18.47 5 人及以上 21.93
下载: 导出CSV
表 3 样本数据的信度及效度检验
Table 3. Reliability and validity test of samples
潜变量 题项 KMO 因子载荷 Cronbach’s Alpha 感知有用性 pu1 0.841 0.905 0.917 pu2 0.913 pu3 0.910 pu4 0.850 感知易用性 peu1 0.770 0.945 0.945 peu2 0.957 peu3 0.946 感知信任 pt1 0.764 0.960 0.956 pt2 0.970 pt3 0.947 社会规范 sn1 0.762 0.967 0.954 sn2 0.963 sn3 0.942 行为意向 biu1 0.770 0.974 0.964 biu2 0.963 biu3 0.959
下载: 导出CSV
表 4 个人属性对感知易用性的影响
Table 4. Impact of travelers’ demographic characteristics on potential variable PEU
变量 估计参数 P 值 性别 0.392 0 年龄 −0.135 0 受教育程度 0.047 0.004 职业 −0.108 0 家庭月收入 −0.003 0.832 是否有学龄儿童 0.083 0 是否有驾照 0.235 0 家庭是否有小汽车 0.178 0 是否有公交 IC 卡 0.025 0.325 家庭总人口 −0.022 0.012
下载: 导出CSV
表 5 带潜变量的RPLM和带潜变量的MNLM参数标定结果
Table 5. Estimation results of the RPLM with latent variables and MNLM with latent variables
出行
方式变量 带潜变量的
RPLM带潜变量的MNLM 估计
参数Z 值 估计
参数Z 值 私人无人驾驶汽车 AGE1 1.271 5.87 1.201 6.00 EDU3 0.539 1.87 0.466 1.73 HINC4 −2.017 −8.22 −1.928 −8.49 LICENSE 0.390 1.97 0.356 1.91 CAR 0.166 0.74 0.182 0.84 ICARD −0.562 −2.42 −0.575 −2.63 CAR2WORK 0.086 0.38 0.135 0.63 HSIZE 0.287 4.35 0.258 4.31 PT 1.270 2.96 1.188 2.94 SN −0.499 −2.41 −0.428 −2.25 BIU 1.765 3.78 1.668 3.81 共享无人驾驶汽车 AGE1 0.759 3.50 0.698 3.55 EDU3 1.042 3.76 0.985 3.92 HINC4 −1.439 −5.90 −1.353 −6.18 LICENSE 0.056 0.28 0.047 0.25 CAR 0.373 1.66 0.365 1.77 ICARD −0.154 −0.65 −0.181 −0.84 CAR2WORK −2.005 −7.39 −1.826 −8.02 HSIZE 0.303 4.25 0.269 4.31 PT 0.936 2.23 0.878 2.31 SN −0.181 −0.91 −0.118 −0.66 BIU 1.522 3.33 1.387 3.38 TC 均值 −0.029 −4.77 −0.029 −5.31 TC 标准差 0.030 2.51 WWT −0.099 −5.59 −0.093 −5.65 TT −0.037 −4.75 −0.033 −4.84
下载: 导出CSV
表 6 出行费用的边际效用
Table 6. Marginal effects of travel costs
% 出行费用
增加 1%选择私人无人驾驶汽车概率 选择共享无人驾驶汽车概率 选择传统小汽车概率 私人无人驾驶汽车 −1.787 1.536 0.251 共享无人驾驶汽车 0.846 −1.071 0.225 传统小汽车 0.346 0.575 −0.920
下载: 导出CSV
-
[1] CHILDRESS S, NICHOLS B, CHARLTON B, et al. Using an activity-based model to explore the potential impacts of automated vehicles[J]. Transportation Research Record:Journal of the Transportation Research Board, 2015, 2493(1): 99-106. doi: 10.3141/2493-11 [2] AULD J, SOKOLOV V, STEPHENS T S. Analysis of the effects of connected–automated vehicle technologies on travel demand[J]. Transportation Research Record:Journal of the Transportation Research Board, 2017, 2625(1): 1-8. doi: 10.3141/2625-01 [3] KRÖ GER L, KUHNIMHOF T, TROMMER S. Does context matter? A comparative study modelling autonomous vehicle impact on travel behaviour for Germany and the USA[J]. Transportation Research Part A:Policy and Practice, 2019, 122: 146-161. doi: 10.1016/j.tra.2018.03.033 [4] GALLEGO G, TOPALOGLU H. Constrained assortment optimization for the nested logit model[J]. Management Science, 2014, 60(10): 2583-2601. doi: 10.1287/mnsc.2014.1931 [5] GRIGOLON L, VERBOVEN F. Nested logit or random coefficients logit?A comparison of alternative discrete choice models of product differentiation[J]. Review of Economics and Statistics, 2014, 96(5): 916-935. doi: 10.1162/REST_a_00420 [6] 刘忠,田莎,陈青,等. 随机系数LOGIT模型的最新发展及其应用[J]. 经济学动态,2012(12): 125-130. [7] BEN-AKIVA M, MCFADDEN D, TRAIN K, et al. Hybrid choice models:progress and challenges[J]. Marketing Letters, 2002, 13(3): 163-175. doi: 10.1023/A:1020254301302 [8] PAULSSEN M, TEMME D, VIJ A, et al. Values,attitudes and travel behavior:a hierarchical latent variable mixed logit model of travel mode choice[J]. Transportation, 2014, 41(4): 873-888. doi: 10.1007/s11116-013-9504-3 [9] KIM J, RASOULI S, TIMMERMANS H. Satisfaction and uncertainty in car-sharing decisions:an integration of hybrid choice and random regret-based models[J]. Transportation Research Part A:Policy and Practice, 2017, 95: 13-33. doi: 10.1016/j.tra.2016.11.005 [10] 景鹏,隽志才,查奇芬. 考虑心理潜变量的出行方式选择行为模型[J]. 中国公路学报,2014,27(11): 84-92,108. doi: 10.3969/j.issn.1001-7372.2014.11.012JING Peng, JUAN Zhicai, ZHA Qifen. Incorporating psychological latent variables into travel mode choice model[J]. China Journal of Highway and Transport, 2014, 27(11): 84-92,108. doi: 10.3969/j.issn.1001-7372.2014.11.012 [11] 鞠鹏,周晶,徐红利,等. 基于混合选择模型的汽车共享选择行为研究[J]. 交通运输系统工程与信息,2017,17(2): 7-13.JU Peng, ZHOU Jing, XU Hongli, et al. Travelers’s choice behavior of car sharing based on hybrid choice model[J]. Journal of Transportation Systems Engineering and Information Technology, 2017, 17(2): 7-13. [12] 刘志伟,刘建荣,邓卫. 考虑潜在类别的市内机动化出行行为模型[J]. 西南交通大学学报,2021,56(1): 131-137.LIU Zhiwei, LIU Jianrong, DENG Wei. Inclusion of latent class in behavior model of motorized travel in city[J]. Journal of Southwest Jiaotong University, 2021, 56(1): 131-137. [13] DAVIS F D, BAGOZZI R P, WARSHAW P R. User acceptance of computer technology:a comparison of two theoretical models[J]. Management Science, 1989, 35(8): 982-1003. doi: 10.1287/mnsc.35.8.982 [14] DAVIS F D. User acceptance of information technology:system characteristics,user perceptions and behavioral impacts[J]. International Journal of Man-Machine Studies, 1993, 38(3): 475-487. doi: 10.1006/imms.1993.1022 [15] VENKATESH V, DAVIS F D. A model of the antecedents of perceived ease of use:development and test[J]. Decision Sciences, 1996, 27(3): 451-481. doi: 10.1111/j.1540-5915.1996.tb01822.x [16] MOU J, SHIN D H, COHEN J F. Trust and risk in consumer acceptance of e-services[J]. Electronic Commerce Research, 2017, 17(2): 255-288. doi: 10.1007/s10660-015-9205-4 [17] BANSAL P, KOCKELMAN K M, SINGH A. Assessing public opinions of and interest in new vehicle technologies:an Austin perspective[J]. Transportation Research Part C:Emerging Technologies, 2016, 67: 1-14. doi: 10.1016/j.trc.2016.01.019 [18] DONG B W, MA X X, CHEN F, et al. Investigating the differences of single-vehicle and multivehicle accident probability using mixed logit model[J]. Journal of Advanced Transportation, 2018, 2018: 2702360.1-2702360.9. [19] WANG W C, YUAN Z Z, LIU Y T, et al. A random parameter logit model of immediate red-light running behavior of pedestrians and cyclists at major-major intersections[J]. Journal of Advanced Transportation, 2019, 2019: 2345903.1-2345903.13. [20] ZENG T. Essays on the random parameters logit model[D]. Baton Rouge: Louisiana State University, 2011. [21] SOTEROPOULOS A, BERGER M, CIARI F. Impacts of automated vehicles on travel behaviour and land use:an international review of modelling studies[J]. Transport Reviews, 2019, 39(1): 29-49. doi: 10.1080/01441647.2018.1523253 [22] WANG J C, WANG X Q. Structural equation modeling: applications using Mplus[M]. Chichester: John Wiley & Sons Ltd., 2012. [23] HENSHER D A, ROSE J M, GREENE W H. Applied choice analysis: a primer[M]. Cambridge: Cambridge University Press, 2005. [24] ZHOU H, NORMAN R, XIA J H, et al. Analysing travel mode and airline choice using latent class modelling:a case study in Western Australia[J]. Transportation Research Part A:Policy and Practice, 2020, 137: 187-205. doi: 10.1016/j.tra.2020.04.020 [25] MOLESWORTH B R C, KOO T T R. The influence of attitude towards individuals’ choice for a remotely piloted commercial flight:a latent class logit approach[J]. Transportation Research Part C:Emerging Technologies, 2016, 71: 51-62. doi: 10.1016/j.trc.2016.06.017 [26] HABOUCHA C J, ISHAQ R, SHIFTAN Y. User preferences regarding autonomous vehicles[J]. Transportation Research Part C:Emerging Technologies, 2017, 78: 37-49. doi: 10.1016/j.trc.2017.01.010 [27] LIU P, YANG R, XU Z G. Public acceptance of fully automated driving:effects of social trust and risk/benefit perceptions[J]. Risk Analysis, 2019, 39(2): 326-341. doi: 10.1111/risa.13143 [28] KRUEGER R, RASHIDI T H, ROSE J M. Preferences for shared autonomous vehicles[J]. Transportation Research Part C:Emerging Technologies, 2016, 69: 343-355. doi: 10.1016/j.trc.2016.06.015 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 917
- HTML全文浏览量: 481
- PDF下载量: 66
- 被引次数: 0