

Application Error of Traffic Speed Deflectometer for Asphalt Pavement Structure with Semi-Rigid Base
-
摘要: 为评估高速弯沉仪在半刚性基层沥青路面结构中的适用性,采用2.5D有限元方法建立高速弯沉仪移动荷载作用下路面结构数值模型,并评估其应用误差. 首先,利用两个前人研究成果验证2.5D有限元程序的可靠性;其次,对比了常用式、全厚式和半刚性基层3种典型沥青路面结构的弯沉斜率曲线,并总结了弯沉斜率特征;最后,针对半刚性基层沥青路面结构的高速弯沉仪应用误差予以评估. 研究结果表明:半刚性基层沥青路面结构弯沉斜率曲线存在多个峰值点;高速弯沉仪应用于半刚性基层沥青路面结构时,参照传感器读数不为0,将其应用于典型半刚性基层沥青路面结构时,因参照传感器误差引起的弯沉误差高达87.3%;为保证工程测试精度,高速弯沉仪应用于半刚性基层沥青路面结构时宜延长横梁长度至8.0 m.
-
关键词:
- 高速弯沉仪 /
- 弯沉斜率 /
- 半刚性基层沥青路面结构 /
- 测试误差
Abstract: In order to evaluate the applicability of traffic speed deflectometer (TSD) in asphalt pavement structure with semi-rigid base, the 2.5D finite element method is employed to establish a numerical model subjected to the moving load of TSD. Firstly, the reliability of the 2.5D finite element program is verified with two previous published results. Then, the deflection slope curves of the conventional, full-depth and semi-rigid base asphalt pavement structure are studied and compared with each other, and their characteristics are summarized. Finally, the applicability error of TSD for asphalt pavement structure with semi-rigid base is examined. Results show that there are multiple peak points in the deflection slope curve of asphalt pavement with semi-rigid base. When TSD is applied to typical asphalt pavement structure with semi-rigid base, deflection test error caused by reference sensor error is as high as 87.3% while the reference sensor reading is not 0. In order to achieve accuracy result, the length of rigid beam of TSD is proposed to be extended to 8.0 m. -
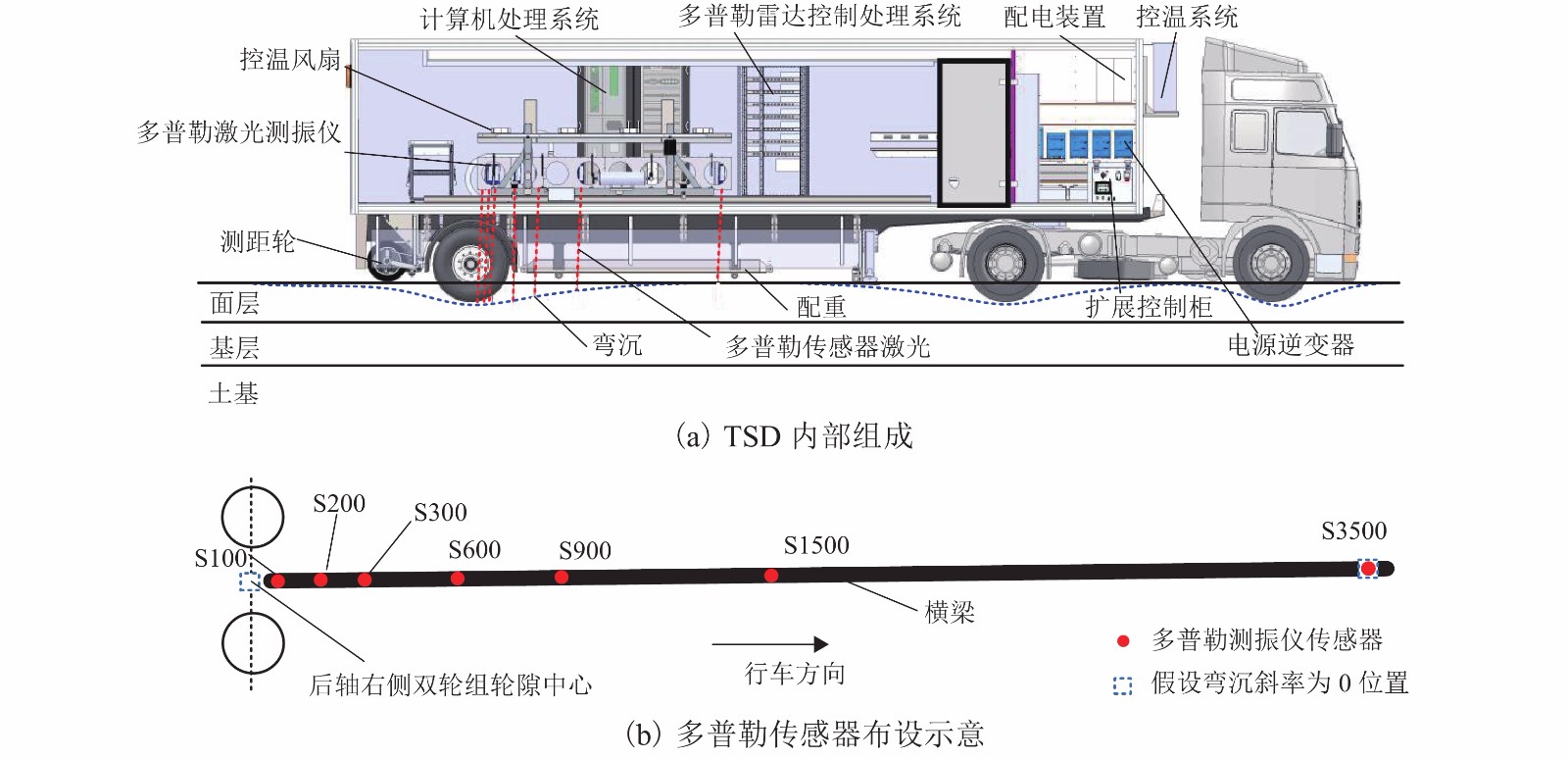
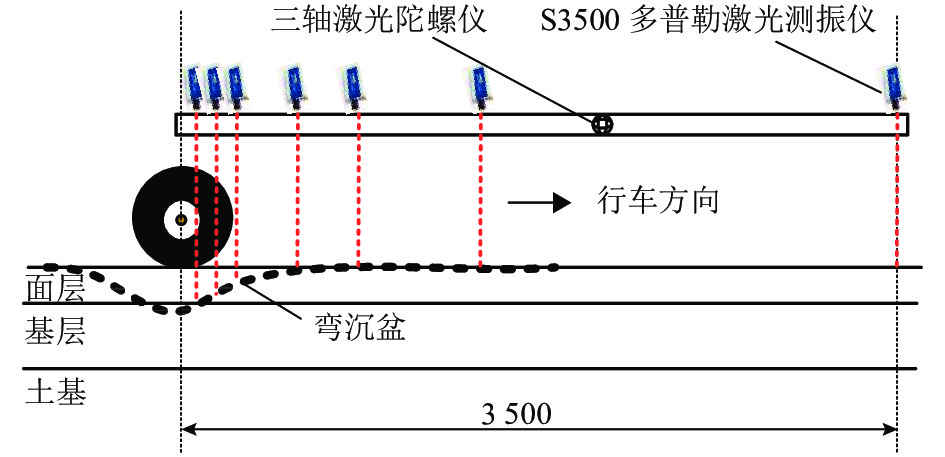
图 1 TSD设备内部组成及多普勒传感器布设示意
Figure 1. Innteral componets of TSD and placement of Doppler sensors

图 4 MnRoadCell 19路面结构及2.5D有限元模型
Figure 4. Pavement structure of MnRoad Cell 19 and 2.5D finite element model
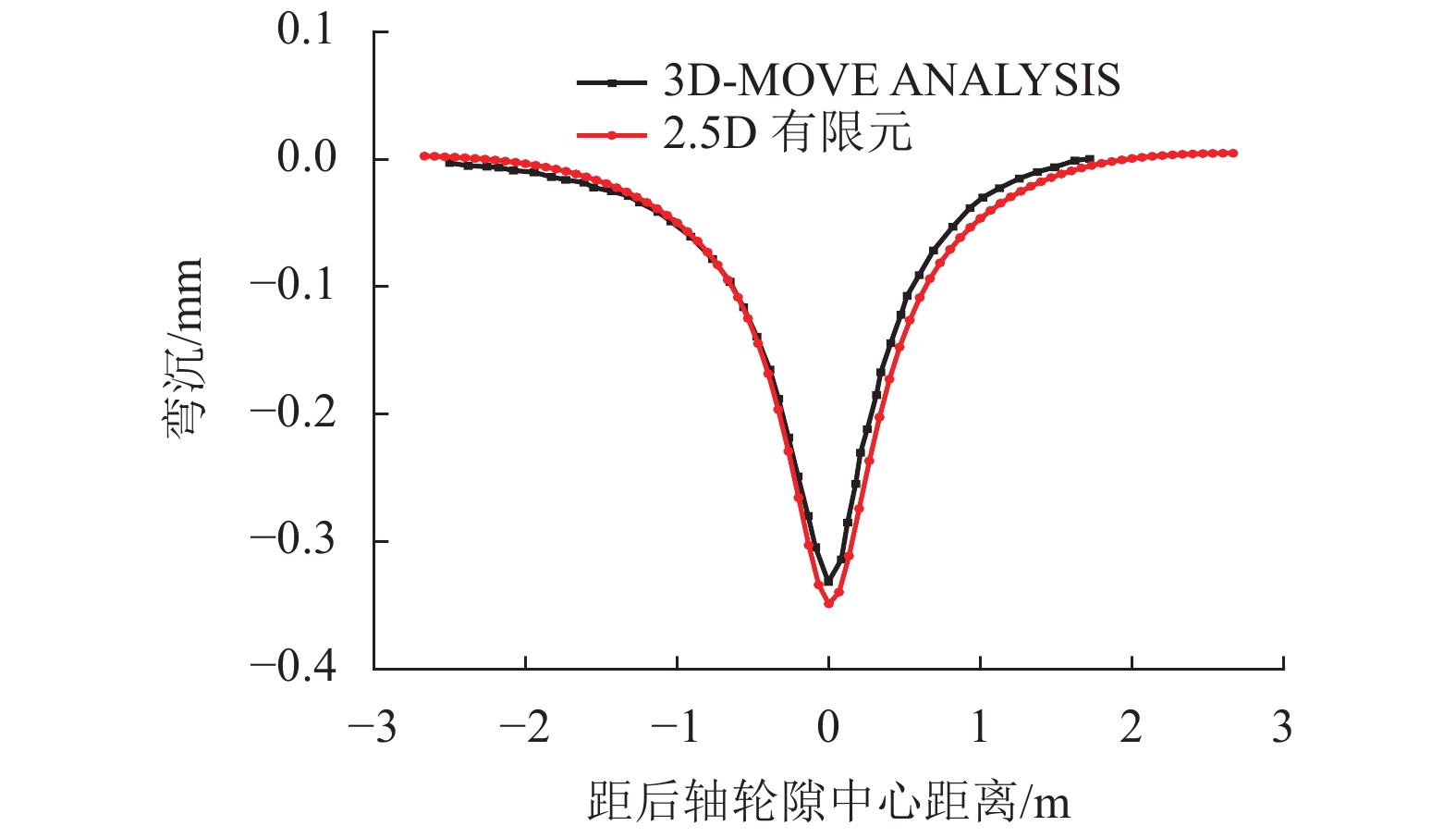
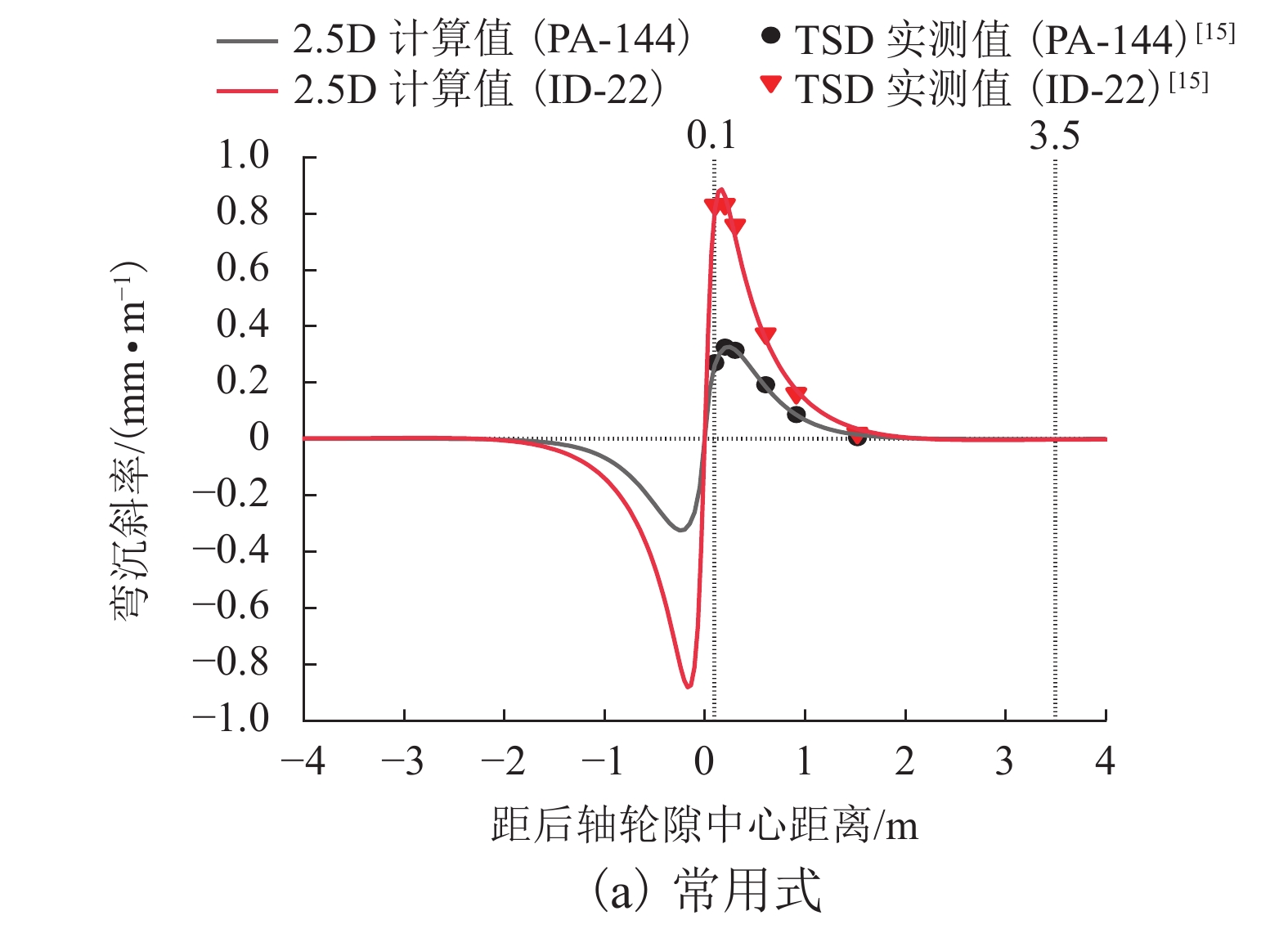
图 5 2.5D有限元与3D-MOVE ANALYSIS弯沉计算结果对比
Figure 5. Calculated result comparison between 2.5D finite element modeland 3D-MOVE ANALYSIS
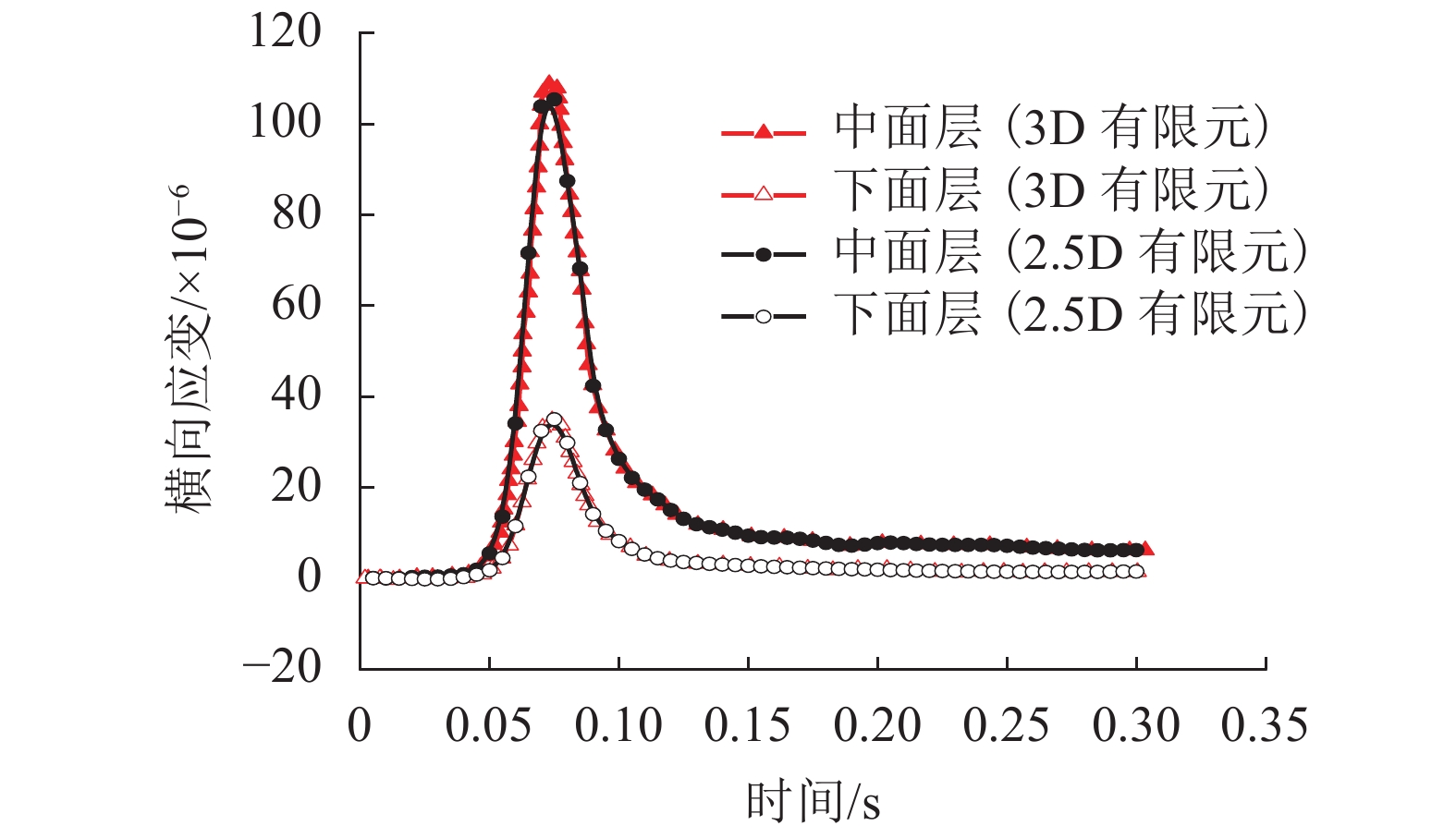
图 6 2.5D有限元和3D有限元模型计算结果对比
Figure 6. Comparison between 2.5D and 3D finite element model for semi-rigid pavement structure
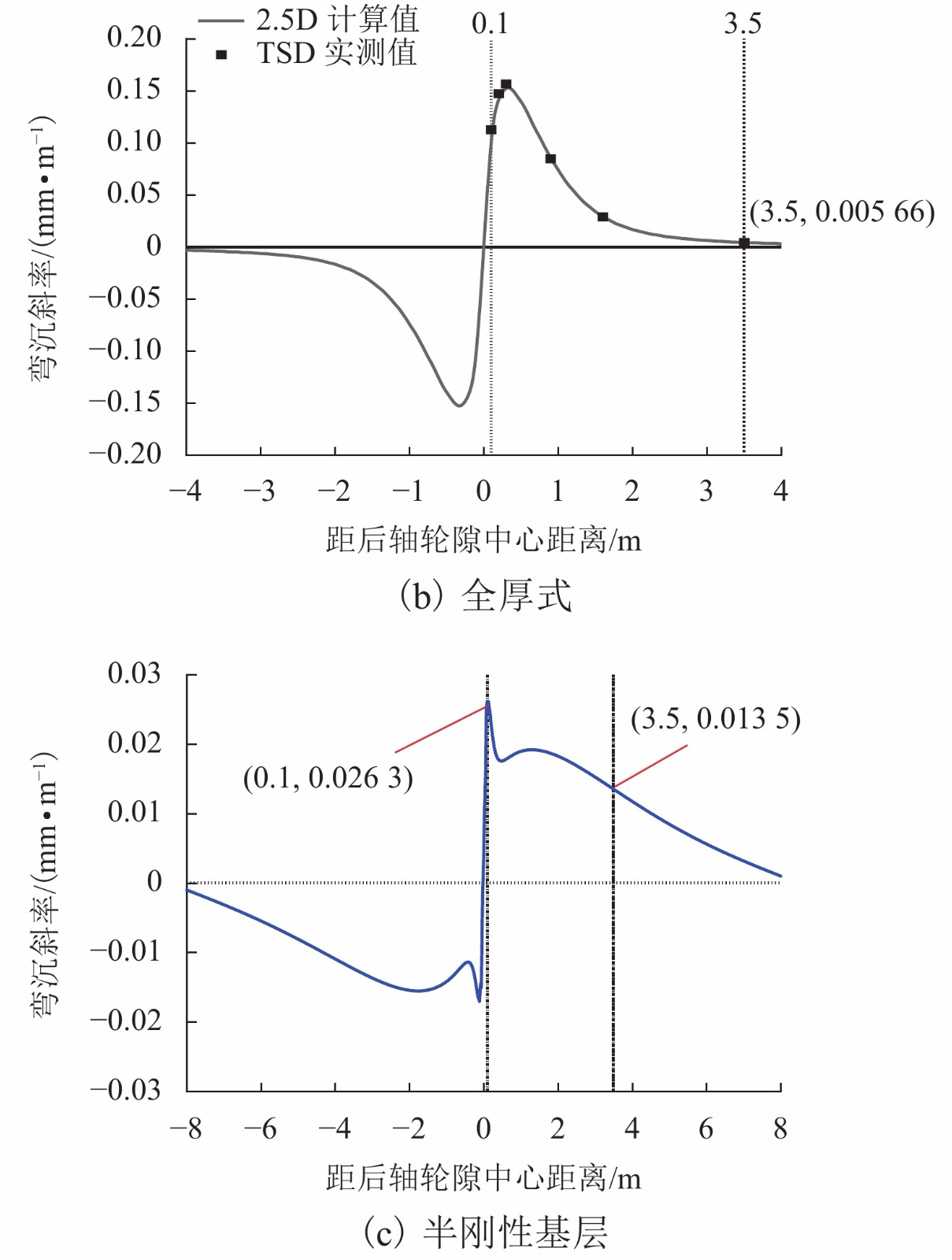
图 7 3种沥青路面结构弯沉斜率
Figure 7. Deflection slope curves of three types of asphalt pavement structure under the moving load of TSD
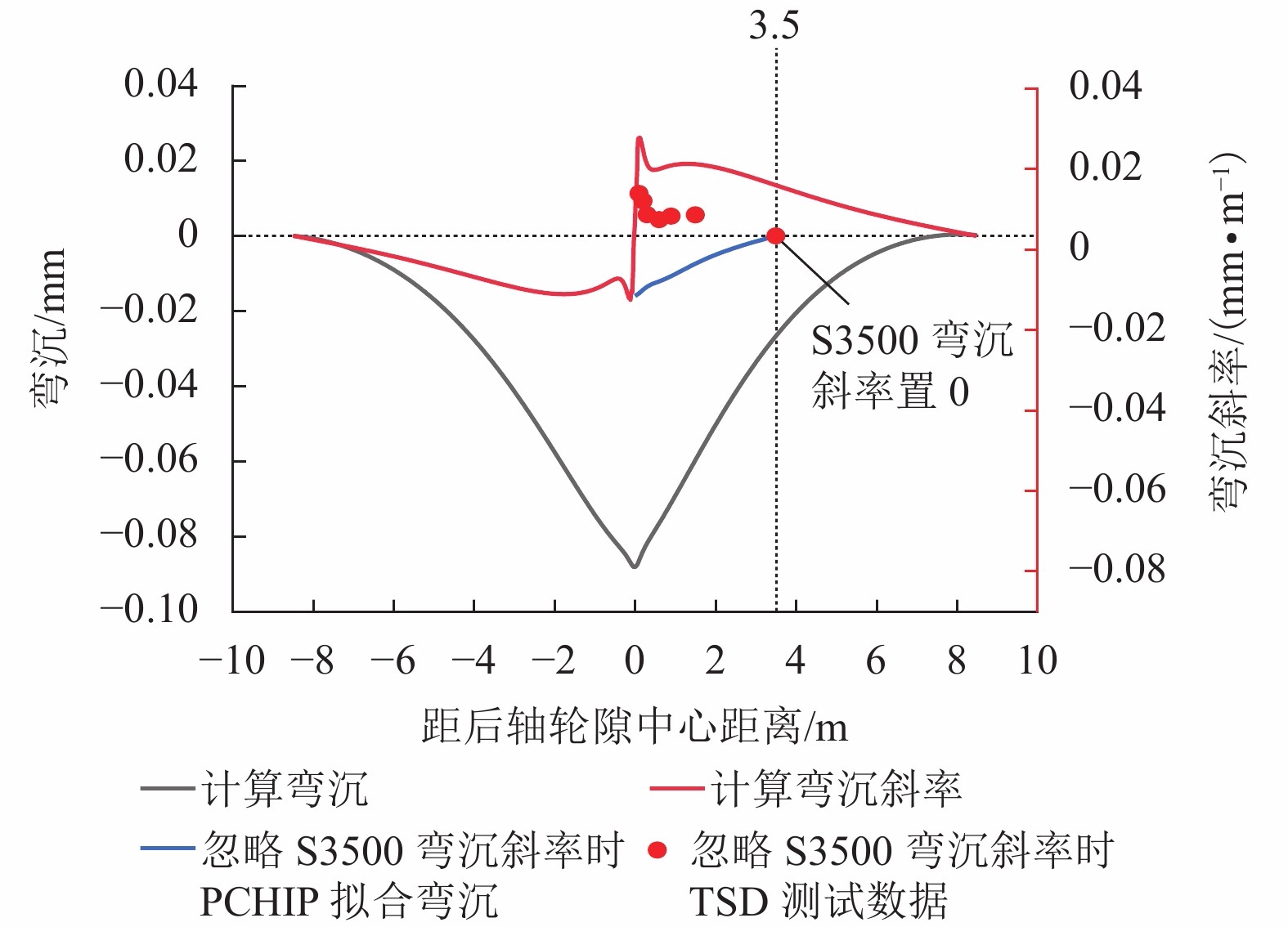
图 8 忽略S3500传感器弯沉斜率时计算弯沉和拟合弯沉的差异
Figure 8. Difference between fitting deflection and calculated deflection in the case of ignoring of S3500 sensor deflection
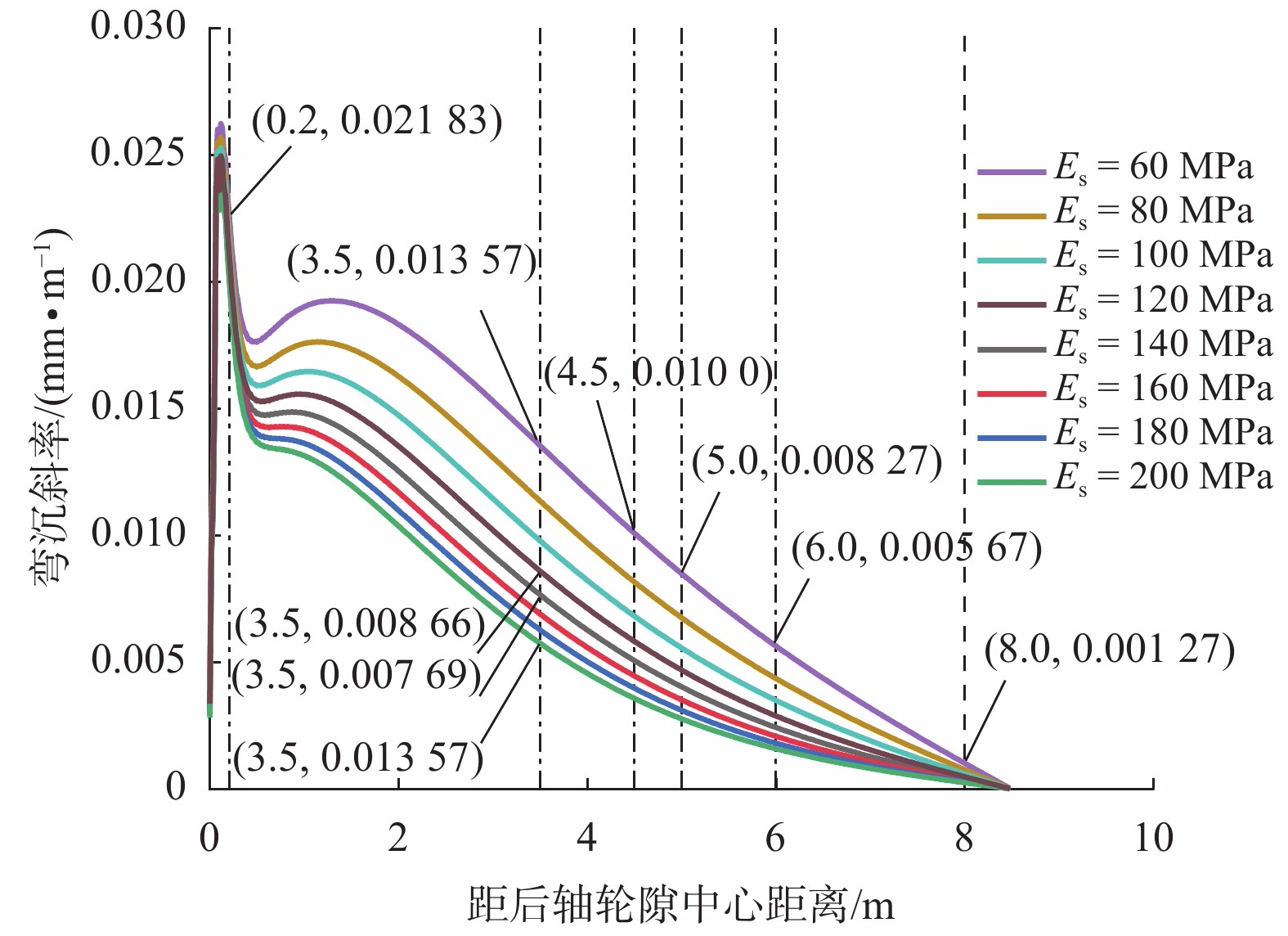
图 9 半刚性基层沥青路面不同土基模量结构弯沉斜率曲线
Figure 9. Influence of subgrade modulus on deflection slope in asphalt pavement with semi-rigid base
表 1 路面结构材料参数表
Table 1. Material parameters of pavement structure
层位 材料 瞬态
模量/MPa泊松比 密度/
(kg•m−3)厚度/
cm上面层 SMA-16 1550 0.35 2400 4 中面层 AC-25 1250 0.35 2400 5 下面层 AC-30 2450 0.35 2400 7 上基层 二灰砂 10000 0.25 2100 38 下基层 石灰土 2000 0.35 1900 36 土基 土基 250 0.40 1900 600  下载: 导出CSV
下载: 导出CSV
表 2 沥青混合料Prony级数参数
Table 2. Prony series parameters of asphalt mixture
${\tau}$/s g SMA-16 AC-25 AC-30 1 × 10−5 0.7490 0.3933 0.3696 1 × 10−4 0.1063 0.2357 0.2011 1 × 10−3 0.0643 0.1867 0.1942 1 × 10−2 0.0290 0.1168 0.1223 1 × 10−1 0.0145 0.0438 0.0574 1 × 100 0.0068 0.0153 0.0235 1 × 101 0.0036 0.0044 0.0100 1 × 102 0.0017 0.0007 0.0041 1 × 103 0.0013 0.0018 0.0027
下载: 导出CSV
表 3 路面结构厚度及模量
Table 3. Parameters of asphalt pavement structure
路段 面层厚度/cm 面层模量/MPa 基层厚度/cm 基层模量/MPa 土基厚度/cm 土基模量/MPa PA-144 16.5 1585.3 20.9 275.2 139.7 158.3 ID-22 8.3 2516.1 20.4 208.7 127.0 74.2 US9-43 22.8 3462.0 350.0 188.0 CDN 18.0 10000.0 50.0 13000.0 600.0 60.0
下载: 导出CSV
-
XU B, RANJITHAN S R, KIM Y R. New relationships between falling weight deflectometer deflections and asphalt pavement layer condition indicators[J]. Transportation Research Board, 2002, 1806(1): 48-56. doi: 10.3141/1806-06 赵茂才. 道路无损检测技术[M]. 北京: 电子工业出版社, 2016: 10-15. PEDERSEN L. Viscoelastic modelling of road deflections for use with the traffic speed deflectometer[D]. Copenhagen: Technical University of Denmark, 2013. 张德津,李清泉,曹民,等. 基于路面变形速度的弯沉测量方法[J]. 上海交通大学学报,2015,49(2): 220-226,231.ZHANG Dejin, LI Qingquan, CAO Min, et al. Deflection measurement methods based on velocities of pavement deflections[J]. Journal of Shanghai Jiaotong University, 2015, 49(2): 220-226,231. FLINTSCH G, KATICHA S, BRYCE J, et al. Assessment of continuous pavement deflection measuring technologies[R]. Washington D. C.: Transportation Research Board, 2013. RADA G R, NAZARIAN S, VISINTINE B A, et al. Pavement structural evaluation at the network level: final report[R]. Washington D. C.: US Federal Highway Administration, 2016. FLINTSCH G W, FERNE B, DIEFENDERFER B, et al. Evaluation of traffic speed continuous deflection devices[C]//Proceedings of the 91st Annual Meeting. Washington D. C.: Transport Research Board, 2012: 37-46. 王宏畅,黄晓明,傅智. 半刚性基层表面裂缝影响因素[J]. 交通运输工程学报,2005,5(2): 38-41. doi: 10.3321/j.issn:1671-1637.2005.02.010WANG Hongchang, HUANG Xiaoming, FU Zhi. Influence factors on surface crack of semi-rigid base course[J]. Journal of Traffic and Transportation Engineering, 2005, 5(2): 38-41. doi: 10.3321/j.issn:1671-1637.2005.02.010 沙爱民. 半刚性基层的材料特性[J]. 中国公路学报,2008,21(1): 1-5. doi: 10.3321/j.issn:1001-7372.2008.01.001SHA Aimin. Material characteristics of semi-rigid base[J]. China Journal of Highway and Transport, 2008, 21(1): 1-5. doi: 10.3321/j.issn:1001-7372.2008.01.001 MULLER W B, ROBERTS J. Revised approach to assessing traffic speed deflectometer data and field validation of deflection bowl predictions[J]. International Journal of Pavement Engineering, 2013, 14(4): 388-402. doi: 10.1080/10298436.2012.715646 董泽蛟,谭忆秋,欧进萍. 三向非均布移动荷载作用下沥青路面动力响应分析[J]. 土木工程学报,2013,46(6): 122-130.DONG Zejiao, TAN Yiqiu, OU Jinping. Dynamic response analysis of asphalt pavement under three-directional nonuniform moving load[J]. China Civil Engineering Journal, 2013, 46(6): 122-130. 何俊锋. 2.5维有限元法分析列车运行引起的地面动力特性及沉降[D]. 上海: 同济大学, 2009. 边学成. 高速列车运动荷载作用下地基和隧道的动力响应分析[D]. 杭州: 浙江大学, 2005. WU C Y, WANG H, ZHAO J N, et al. Prediction of viscoelastic pavement responses under moving load and nonuniform tire contact stresses using 2.5-D finite element method[J]. Mathematical Problems in Engineering, 2020, 2020: 1-16. NASIMIFAR M, THYAGARAJAN S, SIVANESWARAN N. Backcalculation of flexible pavement layer moduli from traffic speed deflectometer data[J]. Transportation Research Record, 2017, 2641(1): 66-74. doi: 10.3141/2641-09 NASIMIFAR M, THYAGARAJAN S, SIVANESWARAN N. Computation of pavement vertical surface deflections from traffic speed deflectometer data:evaluation of current methods[J]. Journal of Transportation Engineering,Part B:Pavements, 2018, 144(1): 04018001.1-04018001.9. 查旭东. 路面结构层模量反算方法综述[J]. 交通运输工程学报,2002,2(4): 1-6. doi: 10.3321/j.issn:1671-1637.2002.04.001ZHA Xudong. Summary of back calculation methods of pavement layer moduli[J]. Journal of Traffic and Transportation Engineering, 2002, 2(4): 1-6. doi: 10.3321/j.issn:1671-1637.2002.04.001 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 550
- HTML全文浏览量: 410
- PDF下载量: 30
- 被引次数: 0