

Obstacle Detection and Tracking for Driverless Cars Based on Lidar
-
摘要:
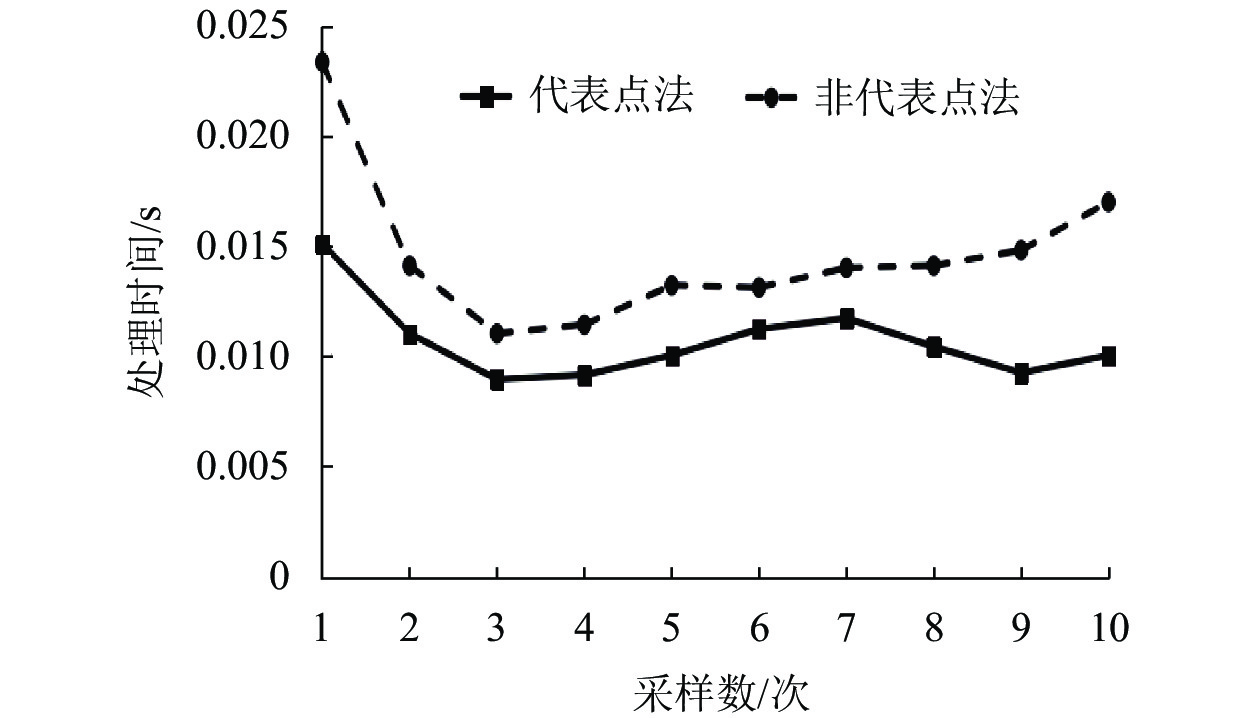
针对激光雷达动态障碍物检测与跟踪过程中聚类适应性差、实时性低和跟踪准确度不高等问题,提出一种自适应的密度聚类算法和多特征数据关联方法,分别用于检测和跟踪. 首先,对激光雷达采集的点云进行路沿检测、感兴趣区域提取和地面分割等预处理,去除无关点云;然后,基于自适应的密度聚类算法对非地面的点云进行聚类,完成障碍物点云检测;最后,利用加权多特征数据关联算法结合卡尔曼滤波器实现对动态障碍物跟踪. 通过实验表明:本算法能够根据10 Hz的激光雷达数据实现对障碍物准确、稳定的检测和跟踪,且聚类时间缩短32%.
Abstract:To improve clustering adaptability, real-time performance, and tracking accuracy in the process of dynamic obstacle detection and tracking with lidar, an adaptive density clustering algorithm and a multi-feature data association method are developed for detection and tracking respectively. Firstly, the point cloud collected by the lidar is pre-processed such as curb detection, area-of-interest extraction and ground segmentation to remove irrelevant point clouds. Then the non-ground point clouds are clustered according to the adaptive clustering algorithm to complete the obstacle point cloud detection. Finally, a weighted multi-feature data association algorithm combined with Kalman filter is used to track dynamic obstacles. The experiments show that the entire detection process with the proposed methods can accurately and stably detect and track the 10 Hz lidar data, and shorten the clustering time by 32%.
-
Key words:
- lidar /
- cluster /
- data association /
- Kalman filter /
- target tracking
-

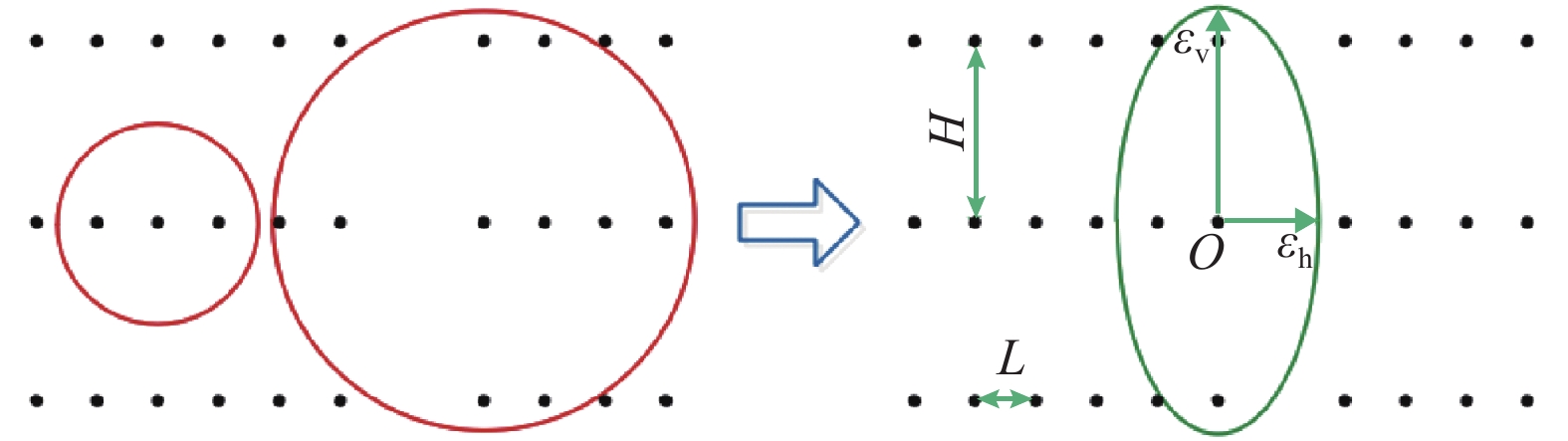
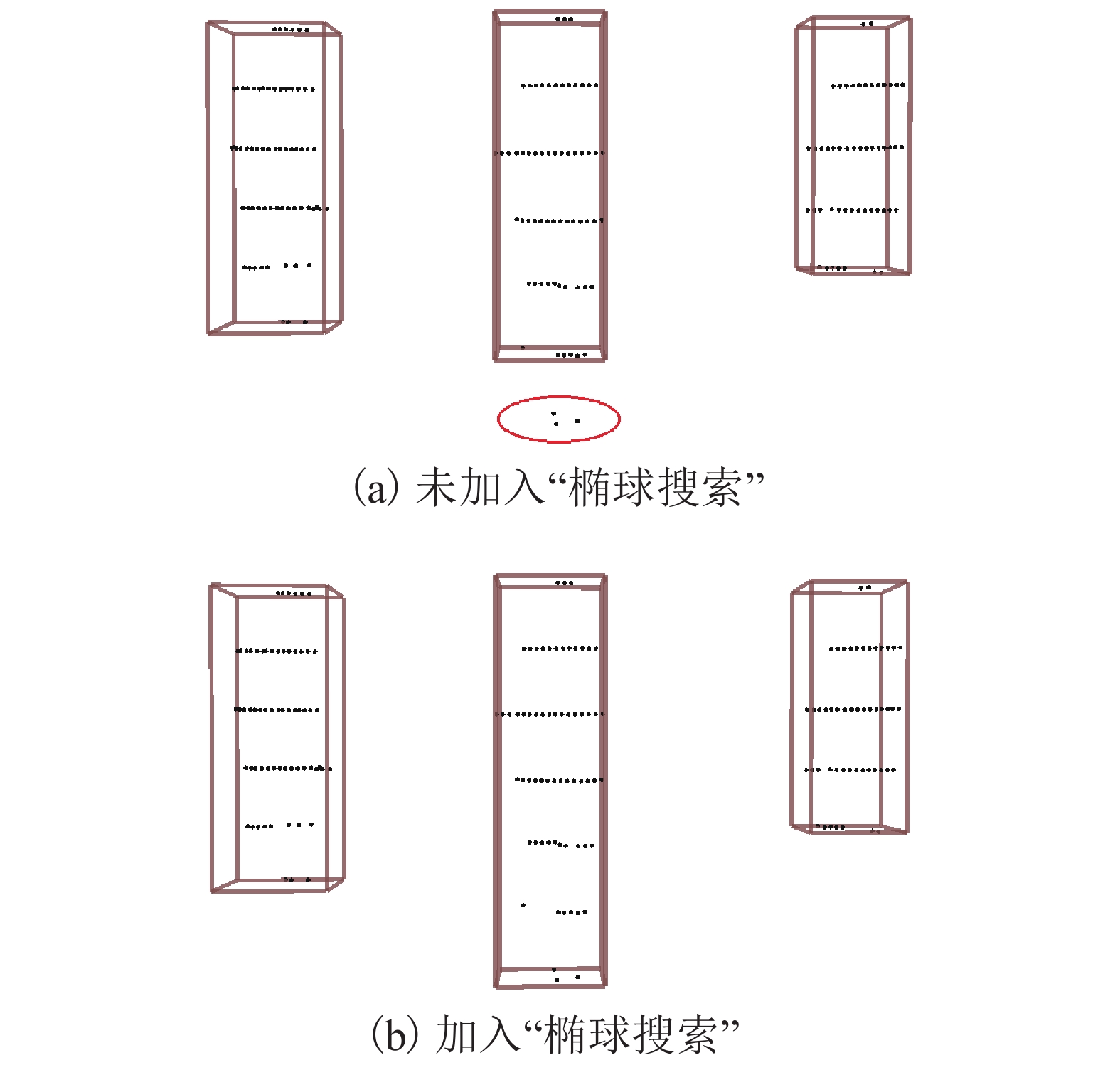
图 6 椭球域及其代表对象的三维邻域
Figure 6. Three-dimensional neighborhood ofellipsoidal domain and its representative objects
-
[1] 谢德胜,徐友春,王任栋,等. 基于三维激光雷达的无人车障碍物检测与跟踪[J]. 汽车工程,2018,40(8): 952-959.XIE Desheng, XU Youchun, WANG Rendong, et al. Obstacle detection and tracking for unmanned vehicles based on 3D laser radar[J]. Automotive Engineering, 2018, 40(8): 952-959. [2] AZIM A, AYCARD O. Layer-based supervised classification of moving objects in outdoor dynamic environment using 3D laser scanner[C]//2014 IEEE Intelligent Vehicles Symposium Proceedings. Dearborn: IEEE, 2014: 1408-1414. [3] 黄钢,吴超仲,吕能超. 基于改进DBSCAN算法的激光雷达目标物检测方法[J]. 交通信息与安全,2015,33(3): 23-28. doi: 10.3963/j.issn.1674-4861.2015.03.004HUANG Gang, WU Chaozhong, LYU Nengchao. A study of laser radar object detection based on improved DBSCAN algorithm[J]. Journal of Transport Information and Safety, 2015, 33(3): 23-28. doi: 10.3963/j.issn.1674-4861.2015.03.004 [4] 包瑞胜,马新,崔熠明. 基于优化DBSCAN算法的智能车载激光雷达数据处理技术研究[J]. 中国交通信息化,2017(3): 135-140. [5] ZHANG J S, KEREKES J. An adaptive density-based model for extracting surface returns from photon-counting laser altimeter data[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(4): 726-730. doi: 10.1109/LGRS.2014.2360367 [6] CHEN J R, XU H, WU J Q, et al. Deer crossing road detection with roadside LiDAR sensor[J]. IEEE Access, 2019, 7: 65944-65954. doi: 10.1109/ACCESS.2019.2916718 [7] LEONARD J, HOW J, TELLER S, et al. A perception-driven autonomous urban vehicle[J]. Journal of Field Robotics, 2008, 25(10): 727-774. doi: 10.1002/rob.20262 [8] NAVARRO-SERMENT L E, MERTZ C, HEBERT M. Pedestrian detection and tracking using three-dimensional LiDAR data[J]. The International Journal of Robotics Research, 2010, 29(12): 1516-1528. doi: 10.1177/0278364910370216 [9] 汪世财,谈东奎,谢有浩,等. 基于激光雷达点云密度特征的智能车障碍物检测与跟踪[J]. 合肥工业大学学报(自然科学版),2019,42(10): 1311-1317. doi: 10.3969/j.issn.1003-5060.2019.10.003WANG Shicai, TAN Dongkui, XIE Youhao, et al. Obstacle detection and tracking for intelligent vehicle based on density characteristics of point cloud using 3D lidar[J]. Journal of Hefei University of Technology(Natural Science), 2019, 42(10): 1311-1317. doi: 10.3969/j.issn.1003-5060.2019.10.003 [10] HAN J, KIM D, LEE M, et al. Enhanced road boundary and obstacle detection using a downward-looking LIDAR sensor[J]. IEEE Transactions on Vehicular Technology, 2012, 61(3): 971-985. doi: 10.1109/TVT.2012.2182785 [11] ZHOU Y, WANG D, XIE X, et al. A fast and accurate segmentation method for ordered LiDAR point cloud of large-scale scenes[J]. IEEE Geoscience and Remote Sensing Letters, 2014, 11(11): 1981-1985. doi: 10.1109/LGRS.2014.2316009 [12] XU S, WANG R S, WANG H, et al. An optimal hierarchical clustering approach to mobile LiDAR point clouds[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(7): 2765-2776. doi: 10.1109/TITS.2019.2912455 [13] 刘健. 基于三维激光雷达的无人驾驶车辆环境建模关键技术研究[D]. 合肥: 中国科学技术大学, 2016. [14] ZHANG Y S, SUN X, XU H, et al. Tracking multi-vehicles with reference points switches at the intersection using a roadside LiDAR sensor[J]. IEEE Access, 2019, 7: 174072-174082. doi: 10.1109/ACCESS.2019.2953747 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 1298
- HTML全文浏览量: 1554
- PDF下载量: 139
- 被引次数: 0