

Urbanization Attribute Evaluation for Prefabricated Substation Based on MCD-AHP
-
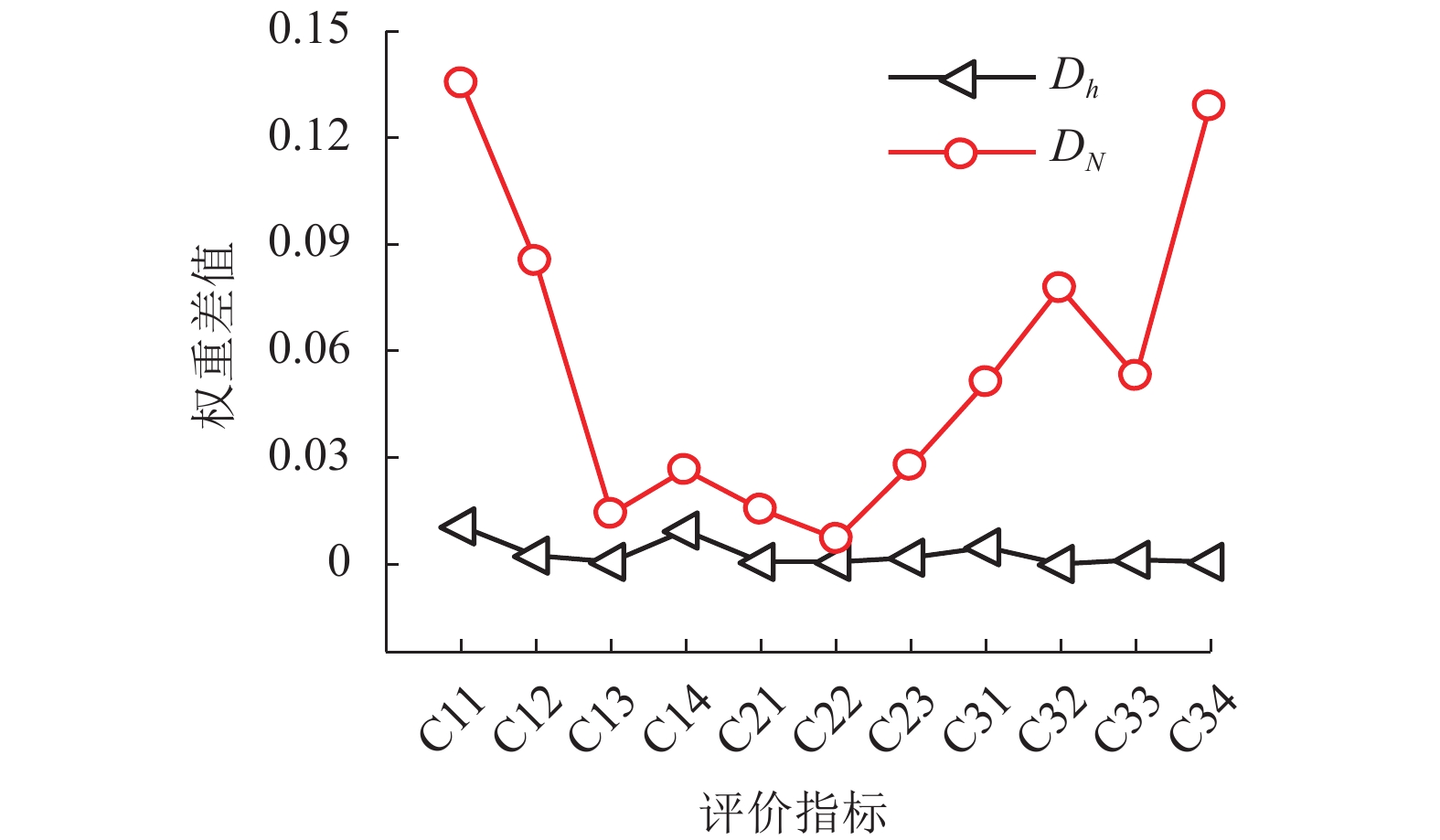
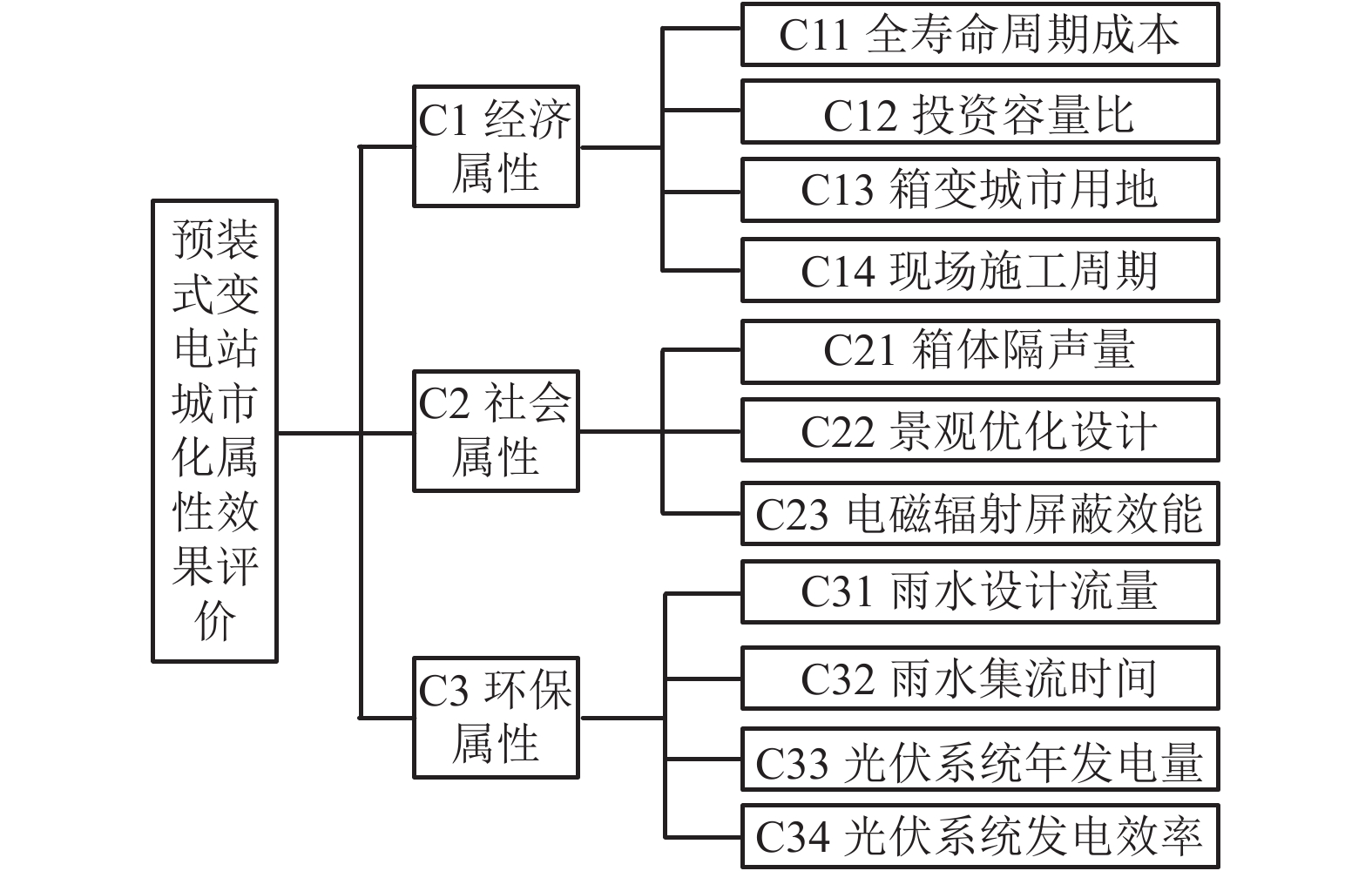
摘要: 为提高城市轨道交通预装式变电站建设的城市化属性效果,需要对其城市化属性指标做出准确评价. 首先,构建了包含经济属性、社会属性、节能属性3类指标的预装式变电站城市化属性指标评价体系,并给出了评价指标的量化模型;然后,引入最小协方差行列式 (minimum covariance determinant,MCD)稳健分析法对层次分析法 (analytic hierarchy process,AHP)中专家组所给出的判断矩阵进行检测,去除由于专家组成员之间主观认知的差异性而产生的离群矩阵;最后,应用改进后的层次分析法(MCD-AHP)对预装式变电站城市化属性指标权重进行计算并评价. 结果表明:去除离群矩阵样本后,上、下限矩阵计算所得指标权重差值的绝对值为0~0.0103、相对变化比率为0~9.31%,明显优于全样本状态下权重差值的绝对值率0.0138~0.1355和相对变化比15.99%~106.23%,该方法可有效提高判断矩阵的逻辑一致性和权重值的聚合性.Abstract: In order to improve the urbanization attribute effect of the prefabricated substation construction for urban rail transits, it is necessary to make an accurate evaluation of its urbanization attribute index. First, an evaluation system of prefabricated substation urbanization attribute indexes is built, including economic attributes, social attributes, and energy-saving attributes, and a quantitative model of the evaluation indexes is presented. Then, the robust analysis method with the minimum covariance determinant (MCD) is used to detect the judgment matrix provided by the expert group in the analytic hierarchy process (AHP) and remove the outlier matrix due to the difference in subjective cognition among the members of the expert group. Finally, the improved MCD-AHP is used to calculate and evaluate the weights of the urbanization attribute indexes for the prefabricated substation. The results show that after removing the outlier matrix samples, the absolute value of the index weight difference calculated by the upper and lower limit matrices ranges from 0 to 0.0103, and the the relative change ratio is from 0 to 9.31%, which is significantly better than the corresponding ranges of 0.0138−0.1355 and 15.99%−106.23% under the full sample state. This method can effectively improve the logical consistency of the judgment matrix and the aggregation of weight values.
-
表 1 评价指标权重值
Table 1. Evaluation index weights
指标 $W_h^ - $ ${{W} }_h^ +$ ${ {W} }_{{N} }^ -$ ${ {W} }_{{N} }^ +$ C11 0.1357 0.1460 0.0714 0.2069 C12 0.0576 0.0598 0.0376 0.1228 C13 0.0621 0.0623 0.0507 0.0645 C14 0.1000 0.0911 0.0630 0.0894 C21 0.0463 0.0462 0.0246 0.0397 C22 0.0672 0.0674 0.0397 0.0466 C23 0.0702 0.0715 0.0895 0.1168 C31 0.1120 0.1075 0.1658 0.1150 C32 0.0462 0.0462 0.1481 0.0703 C33 0.1143 0.1135 0.1169 0.0640 C34 0.1884 0.1887 0.1928 0.0640  下载: 导出CSV
下载: 导出CSV
表 2 矩阵一致性检测结果
Table 2. Matrix consistency test results
判断矩阵 ${\boldsymbol{A}}_h^ -$ ${\boldsymbol{A}}_h^ +$ ${\boldsymbol{A}}_{ {N} }^ -$ ${\boldsymbol{A}}_{ {N} }^ +$ CR 0.065 8 0.065 4 0.164 9 0.291 9
下载: 导出CSV
表 3 上限、下限矩阵权重差值和相对变化比率
Table 3. Weight difference of upper and lower limit matrices and relative change ratio
指标 ${D_h}$ ${D_N}$ ${ { {E} }_h}/ {\text{%}}$ ${ { {E} }_N}/{\text{%} }$ C11 0.0103 0.1355 7.31 97.38 C12 0.0022 0.0852 3.75 106.23 C13 0.0002 0.0138 0.32 23.96 C14 0.0089 0.0264 9.31 34.65 C21 0.0001 0.0151 0.22 46.97 C22 0.0002 0.0069 0.30 15.99 C23 0.0013 0.0273 1.83 26.47 C31 0.0045 0.0508 4.10 36.18 C32 0.000 0 0.0778 0.00 71.25 C33 0.0008 0.0529 0.70 58.49 C34 0.0003 0.1288 0.16 100.31
下载: 导出CSV
-
王峰,王丹璐. 轨道交通预装式变电站与城市一体化问题分析[J]. 电气化铁道,2018,29(6): 87-89.WANG Feng, WANG Danlu. Analysis on the integration of prefabricated substations in urban rail transit[J]. Electric Railway, 2018, 29(6): 87-89. 付稳超,齐洪峰,戴朝华,等. 有轨电车燃料电池混合动力多目标匹配优化[J]. 西南交通大学学报,2020,55(3): 604-611. doi: 10.3969/j.issn.0258-2724.20180370FU Wenchao, QI Hongfeng, DAI Chaohua, et al. Multi-objective matching optimization for hybrid fuel-cell power system intrams[J]. Journal of Southwest Jiaotong University, 2020, 55(3): 604-611. doi: 10.3969/j.issn.0258-2724.20180370 王峰,刘波峰,王丹璐. 基于物元-可拓理论的城市轨道交通预装式变电站状态评估[J]. 铁道科学工程学报,2020,17(2): 477-484.WANG Feng, LIU Bofeng, WANG Danlu. Status assessment for the urban rail transit preloaded substations based onmatter-element extensible theory[J]. Journal of Railway Science and Engineering, 2020, 17(2): 477-484. 许晓芳,谭全银,刘丽丽,等. 基于层次分析法的医疗废物处置技术评价[J]. 环境科学,2018,39(12): 5717-5722.XU Xiaofang, TAN Quanyin, LIU Lili, et al. Assessment of medical waste disposal technologies based on theAHP[J]. Environmental Science, 2018, 39(12): 5717-5722. 段若晨,王丰华,顾承昱,等. 采用改进层次分析法综合评估 500 kV 输电线路防雷改造效果[J]. 高电压技术,2014,40(1): 131-1372.DUAN Ruochen, WANG Fenghua, GU Chengyu, et al. Comprehensive evaluation of 500 kV transmission line lightning protection effect based on improved analytic hierarchy process[J]. High Voltage Engineering, 2014, 40(1): 131-1372. 朱庆,陈凯峥,谢潇,等. 模糊层次分析与三维GIS集成的升压站选址方法[J]. 西南交通大学学报,2019,54(5): 980-988. doi: 10.3969/j.issn.0258-2724.20170887ZHU Qing, CHEN Kaizheng, XIE Xiao, et al. Site selection method of booster substations by integrating fuzzy analytic hierarchyprocess with 3D geographic information system[J]. Journal of Southwest Jiaotong University, 2019, 54(5): 980-988. doi: 10.3969/j.issn.0258-2724.20170887 丁丽宏. 基于改进的灰关联分析和层次分析法的边坡稳定性研究[J]. 岩土力学,2011,32(11): 3437-3441. doi: 10.3969/j.issn.1000-7598.2011.11.039DING Lihong. Research on estimation of slope stability based on improved grey correlation analysis and analytic hierarchy process[J]. Rock and Soil Mechanics, 2011, 32(11): 3437-3441. doi: 10.3969/j.issn.1000-7598.2011.11.039 周捷,李健,马秋瑞,等. 基于改进层次分析法的特殊体型样板识别[J]. 纺织学报,2019,40(5): 124-130.ZHOU Jie, LI Jian, MA Qiurui, et al. Recognition of special template based on improved analytic hierarchy process[J]. Journal of Textile Research, 2019, 40(5): 124-130. 马东辉,郭小东,苏经宇,等. 层次分析法逆序问题及其在土地利用适宜性评价中的应用[J]. 系统工程理论与实践,2007(6): 124-135,165. doi: 10.3321/j.issn:1000-6788.2007.06.019MA Donghui, GUO Xiaodong, SU Jingyu, et al. Inverted-order problem and application in suitability assessment of land use for AHP[J]. Systems Engineering-Theory & Practice, 2007(6): 124-135,165. doi: 10.3321/j.issn:1000-6788.2007.06.019 李玉平,朱琛,张璐璇,等. 基于改进层次分析法的水环境生态安全评价与对策——以邢台市为例[J]. 北京大学学报(自然科学版),2019,55(2): 310-316.LI Yuping, ZHU Chen. ZHANG Lu xuan, et al. Ecological security assessment and countermeasures of water environmentbased on improved analytic hierarchy process:a case study of Xingtai city[J]. Acta Scientiarum Naturalium Universitatis Pekinensis, 2019, 55(2): 310-316. 刘自发,韦涛,李梦渔,等. 基于改进层次分析法的交、直流微电网综合评估[J]. 电力自动化设备,2016,36(3): 60-66,78.LIU Zifa, WEI Tao, LI Mengyu, et al. Comprehensive evaluation based on improved analytic hierarchy process for AC/DC microgrid[J]. Electric Power Automation Equipment, 2016, 36(3): 60-66,78. 环境保护部科技标准司. 声环境质量标准: GB 3096—2008[S]. 北京: 中国环境科学出版社, 2008. 董建文,翟明普,章志都,等. 福建省山地坡面风景游憩林单因素美景度评价研究[J]. 北京林业大学学报,2009,31(6): 154-158.DONG Janwen, ZHAI Mingpu, ZHANG Zhidu, et al. Single-factor analysison scenic beauty of scenic-recreational forest in mountainous region of Fujian province,eastern China[J]. Journal of Beijing Forestry University, 2009, 31(6): 154-158. ICOE S. IEEE standard for safety levels with respect to human exposure to electromagnetic fields, 0–3 kHz: IEEE Std C95.6TM-2002[S]. [S.l.]: IEEE, 2002. 吴殿延,李东方. 从北京师范大学绩效考核看层次分析法的不足及其改进的途径[J]. 系统工程理论与实践,2005(1): 100-104. doi: 10.3321/j.issn:1000-6788.2005.09.017WU Dianting, LI Dongfang. Shortcomings of AHP and the path to improve the method: an example given by the achievement’s ssessment of Beijing Normal University[J]. Systems Engineering-Theory & Practice, 2005(1): 100-104. doi: 10.3321/j.issn:1000-6788.2005.09.017 高树国,王学福,李庆民,等. 基于MCD稳健统计分析的变压器油色谱异常值检测及分布特性[J]. 高电压技术,2014,40(11): 3477-3482.GAO Shuguo, WANG Xuefu, LI Qingmin, et al. Outliers detection and distribution characteristics of the transformer DGA data based on MCD robust statistics[J]. High Voltage Engineering, 2014, 40(11): 3477-3482. 吴国庆,颜学峰. 基于改进MCD的粗差判别方法及性能分析[J]. 华东理工大学学报(自然科学版),2008,34(2): 267-273.WU Guoqing, YAN Xuefeng. Outliers detection based on modified MCD and its performance[J]. Journal of East China University of Science and Technology (Natural Science Edition), 2008, 34(2): 267-273. -

 下载:
下载:

 点击查看大图
点击查看大图
图(4) / 表(3)
计量
- 文章访问数: 592
- HTML全文浏览量: 272
- PDF下载量: 21
- 被引次数: 0