

Stability Analysis of Slopes with Weak Layers Using Limit Analysis Method
-
摘要:
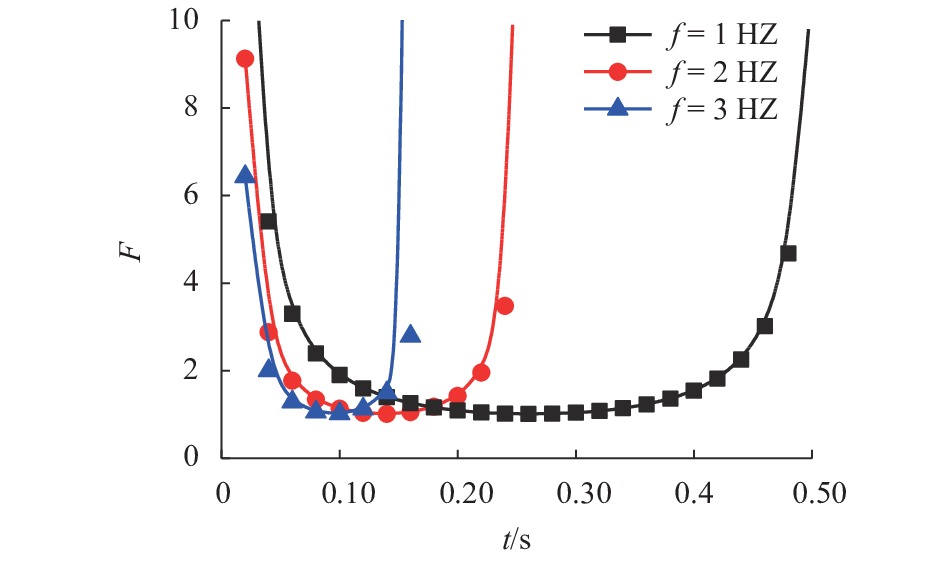
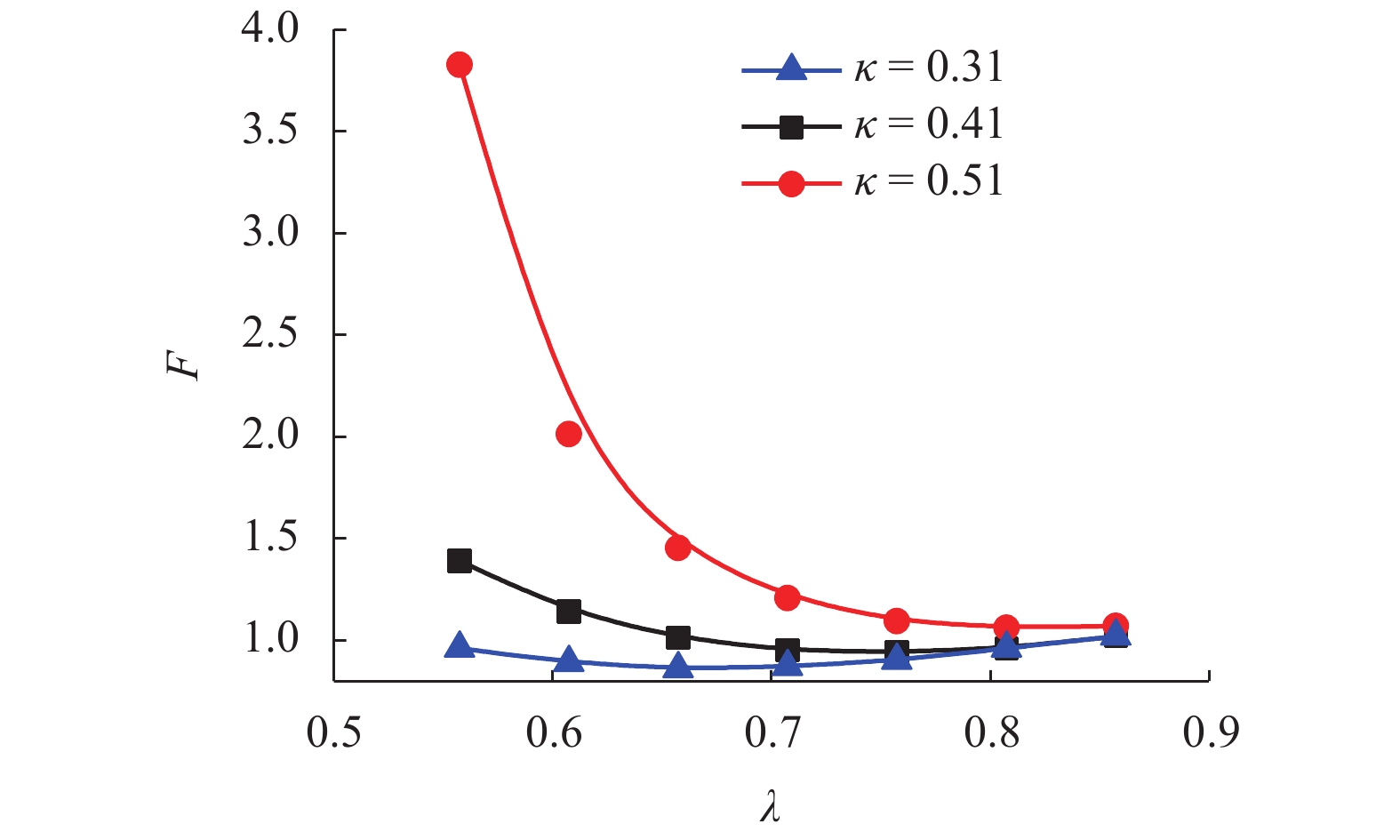
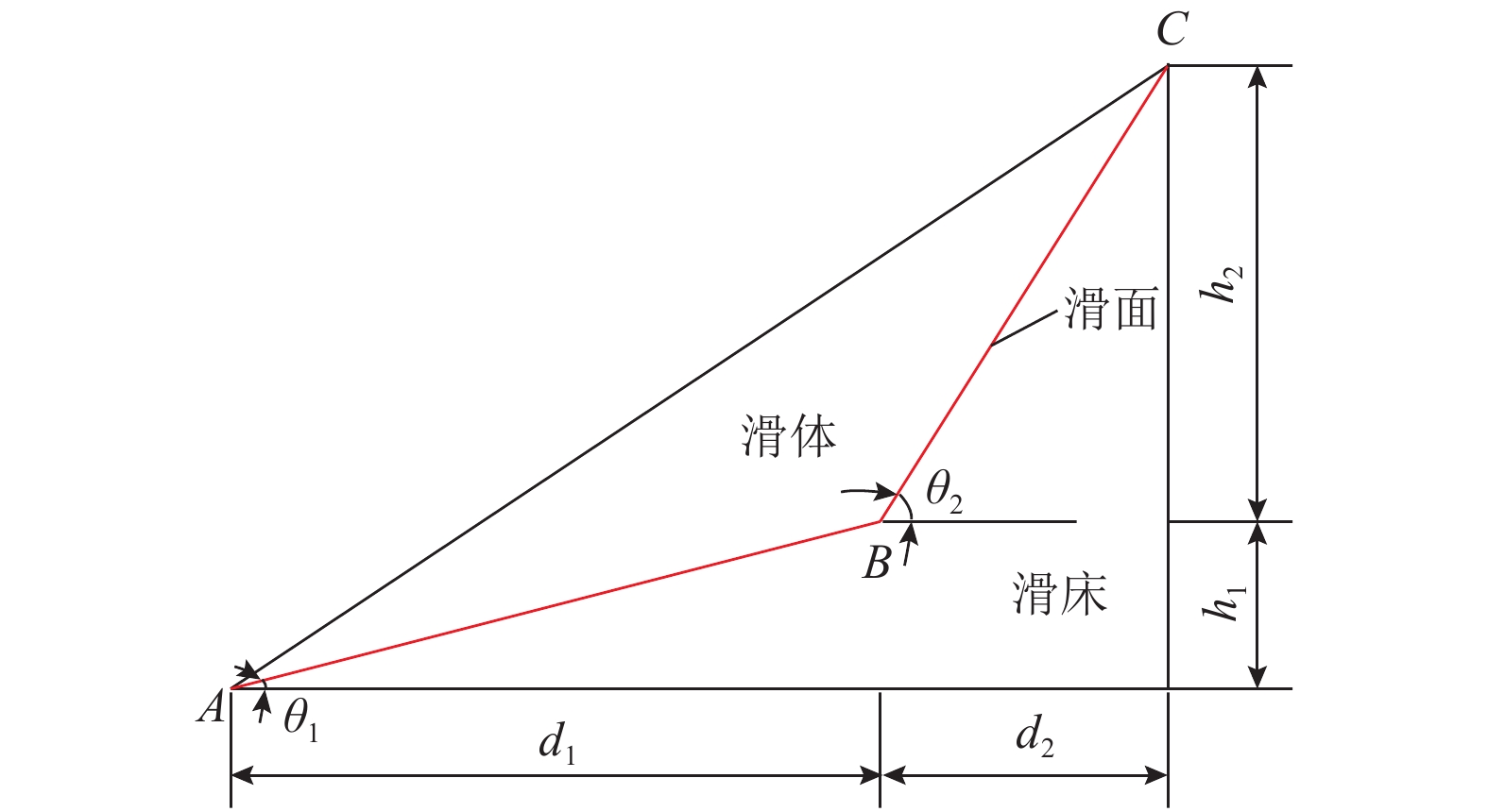
软弱夹层对边坡的稳定性影响显著,目前设计中通常采用极限平衡法计算边坡的稳定性,其在求解中需要建立多个平衡方程. 为了分析含软弱夹层边坡的稳定性,首先,采用极限分析法建立了计算模型;其次,通过极限平衡法验证了求解的准确性;最后,分析了荷载、夹层形状、夹层强度等对稳定性的影响. 研究结果表明:边坡安全系数随着外荷载强度的增大而减小,其中,当加速度放大系数由1.0增大为1.6时,安全系数由1.20降为0.89;当外荷载频率越大时,边坡越易提前产生破坏;软弱夹层形状对边坡安全系数影响显著,特别是当其靠近坡顶与坡面时;安全系数随着软弱夹层摩擦角与黏聚力的减小而近似线性降低,其中,当黏聚力由9 kPa降为5 kPa时,安全系数降低约30%.
Abstract:Weak layers have a significant effect on the stability of slopes. The stability of slopes is usually calculated by the limit equilibrium method in current designs, in which multiple equilibrium equations need to be established and solved. Compared with the limit equilibrium method, the limit analysis method is more rigorous, and requires only one energy equation to be solved. In order to analyze the stability of slopes with weak interlayers, a stability calculation model was established by the limit analysis method, and then the accuracy of the solution was verified by the limit equilibrium method. Finally, the effects of load, weak layer shape, and weak layer strength on stability were analyzed. The results show that the slope safety factor decreases with an increase in the load intensity. When the acceleration amplification factor increases from 1.0 to 1.6 the safety factor decreases from 1.20 to 0.89. With a higher frequency of the external load, the slope is easier to be damaged in advance. Besides, the shape of the weak layer has a significant effect on the slope safety factor, especially when it is close to the top and surface of the slope. The safety factor decreases approximately linearly with the decrease of the friction angle and cohesion of weak layers. When the cohesion strength decreases from 9 kPa to 5 kPa, the safety factor decreases by about 30%.
-
Key words:
- weak layer /
- slope /
- limit equilibrium method /
- limit analysis method /
- safety factor
-
表 1 计算结果
Table 1. Calculation results
工况 kP d1
/md2
/mh1
/mh2
/mγ
/(kN•m−3)c
/kPaφ
/(o)安全系数 本文方法 摩根斯坦-普莱斯法 1 0 11.59 4.95 3.11 4.95 20 6 30 2.02 2.00 2 0.2 11.59 4.95 3.11 4.95 20 6 30 1.35 1.32 3 0.4 11.59 4.95 3.11 4.95 20 6 30 0.99 0.97 4 0.2 11.59 4.95 3.11 4.95 20 6 20 1.05 1.03 5 0.2 9.78 3.54 2.08 3.54 20 6 20 1.22 1.19 注:表中本文方法计算结果为时间 t 内的最小值.  下载: 导出CSV
下载: 导出CSV
-
[1] 刘汉香,许强,周飞,等. 含软弱夹层斜坡地震动力响应特性的振动台试验研究[J]. 岩石力学与工程学报,2015,34(5): 994-1005.LIU Hanxiang, XU Qiang, ZHOU Fei, et al. Shaking table test for seismic responses of slopes with a weak interlayer[J]. Chinese Journal of Rock Mechanics and Engineering, 2015, 34(5): 994-1005. [2] 闫孔明,刘飞成,朱崇浩,等. 地震作用下含倾斜软弱夹层斜坡场地的动力响应特性研究[J]. 岩石力学与工程学报,2017,36(11): 2686-2698.YAN Kongming, LIU Feicheng, ZHU Chonghao, et al. Dynamic responses of slopes with intercalated soft layers under seismic excitations[J]. Chinese Journal of Rock Mechanics and Engineering, 2017, 36(11): 2686-2698. [3] 唐云波,刘炎,相晨琳. 汶川地区含软弱层岩质边坡地震响应研究[J]. 路基工程,2018(6): 114-118.TANG Yunbo, LIU Yan, XIANG Chenlin. Research on seismic response of rock slope with weak layer in Wenchuan region[J]. Subgrade Engineering, 2018(6): 114-118. [4] 刘晋南, 蒋鑫, 邱延峻, 等. 水平地震荷载作用下斜坡路基动力稳定性分析. 中外公路, 2010, 30(5): 42-45.LIU Jinnan, JIANG Xin, QIU Yanjun. Analysis of dynamic stability of subgrade slope under horizontal earthquake load [J]. Journal of China & Foreign Highway, 2010, 30(5): 42-45. [5] CHEN W F. Limit analysis and soil plasticity[M]. Amsterdam: Elsevier Scientific Company, 1975. [6] XU P, HATAMI K, JIANG G. Seismic rotational stability analysis of reinforced soil retaining walls[J]. Computers and Geotechnics, 2020, 118(4): 103297.1-103297.10. [7] MICHALOWSKI R L. Limit analysis and stability charts for 3D slope failures[J]. Journal of Geotechnical and Geoenvironmental Engineering, 2010, 136(4): 583-593. doi: 10.1061/(ASCE)GT.1943-5606.0000251 [8] 何思明,张晓曦,吴永. 基于上限定理的边坡潜在破 裂面确定方法与稳定性判识研究[J]. 岩土力学,2012,33(1): 162-166. doi: 10.3969/j.issn.1000-7598.2012.01.025HE Siming, ZHANG Xiaoxi, WU Yong. Study of stability discriminant of slope and position determination of potential sliding surface based on upper bound theorem[J]. Rock and Soil Mechanics, 2012, 33(1): 162-166. doi: 10.3969/j.issn.1000-7598.2012.01.025 [9] UTILI S. Investigation by limit analysis on the stability of slopes with cracks[J]. Géotechnique, 2013, 63(2): 140-154. [10] XU P, HATAMI K, JIANG G. Seismic sliding stability analysis of reinforced soil retaining walls. Geosynthetics International, 2019, 26(5), 485-496. [11] CHOUDHURY D, NIMBALKAR S. Seismic passive resistance by pseudo-dynamic method[J]. Geotechnique, 2006, 55(7): 517-520. [12] BASHA B M, BABU G L S. Seismic reliability assessment of external stability of reinforced soil walls using pseudo-dynamic method[J]. Geosynthetics International, 2009, 16(3): 197-215. doi: 10.1680/gein.2009.16.3.197 [13] GHOSH P G. Seismic active earth pressure behind a nonvertical retaining wall using pseudo-dynamic analysis[J]. Canadian Geotechnical Journal, 2008, 45(1): 117-123. doi: 10.1139/T07-071 [14] 钱家欢. 土工原理与计算[M]. 北京: 中国水利水电出版社, 1996. [15] 中华人民共和国住房和城乡建设部. 建筑边坡工程技术规范: GB 50330—2013[S]. 北京: 中国建筑工业出版社, 2014. [16] QIAN X D, KOERNER R M, GRAY D H. Translational failure analysis of landfills[J]. Journal of Geotechnical and Geoenvironmental Engineering, 2003, 129(6): 506-519. doi: 10.1061/(ASCE)1090-0241(2003)129:6(506) [17] 周炜,李海波,刘亚群,等. 地震作用下顺层岩质边坡锚固特性的拟动力分析[J]. 岩石力学与工程学报,2016,35(增刊2): 3570-3576.ZHOU Wei, LI Haibo, LIU Yaqun, et al. Pseudo-dynamic analysis of anchored characteristics of layered rock slopes subjected to seismic loads[J]. Chinese Journal of Rock Mechanics and Engineering, 2016, 35(S2): 3570-3576. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 632
- HTML全文浏览量: 291
- PDF下载量: 45
- 被引次数: 0