

Fitting a Straight-Line to Data Points with Correlated Noise Between Coordinate Components under Constraints
-
摘要:
直线拟合在曲线拟合研究及工程实践中受到广泛关注,常用的普通最小二乘和正交最小二乘忽略了坐标分量误差相关性的存在. 基于此,首先论证了在铁路线路整正中全站仪测量坐标点的纵横坐标间存在误差相关性,同时线路中直线的拟合受到相邻线元的约束;然后,基于极大似然估计及拉格朗日条件极值原理,推导出了顾及约束和坐标分量误差相关性的直线拟合通用模型,并给出了高斯-牛顿迭代算法搜索最优解;最后,采用了实测的数据进行了验证及测试. 试验结果表明:该方法能在任何误差分布情况下考虑约束估计直线参数及其精度;考虑坐标相关误差时,参数估计精度在约束及无约束下分别提高了9.2%和2.7%;高斯-牛顿算法在约束及无约束情况下分别仅6次及3次迭代就搜索出最优直线.
Abstract:Straight-line fitting has received extensive attention both in curve fitting research and engineering practice. The methods of ordinary least squares and orthogonal least squares fitting ignore the existence of the observation error correlation. The coordinate pairs of surveying points, obtained by a total station in railway realignment, not only have different levels of precision but also have correlated noise. Meanwhile, straight-line fitting is usually under constraints in the realignment. Thus, a straight-line fitting model was derived based on the maximum likelihood estimation and Lagrange conditional extremum theory, considering constraints and correlated noise between coordinate components, and a Gauss-Newton algorithm was presented to search for the optimum. The method was tested with the field surveying data. Experimental results show that the proposed fitting method is capable of estimating straight-line parameters and their precisions in all circumstances by specifying stochastic models. When considering correlated noise, the precision of estimated parameters improve 9.2% with a constraint and improve 2.7% without constraints, respectively. The Gauss-Newton algorithm takes only 6 and 3 iteration times with a constraint and without constraints respectively, for locating the optimum straight-line.
-
Key words:
- straight-line /
- curve fitting /
- parameter estimation /
- correlated noise /
- conditional extremum /
- algorithm
-
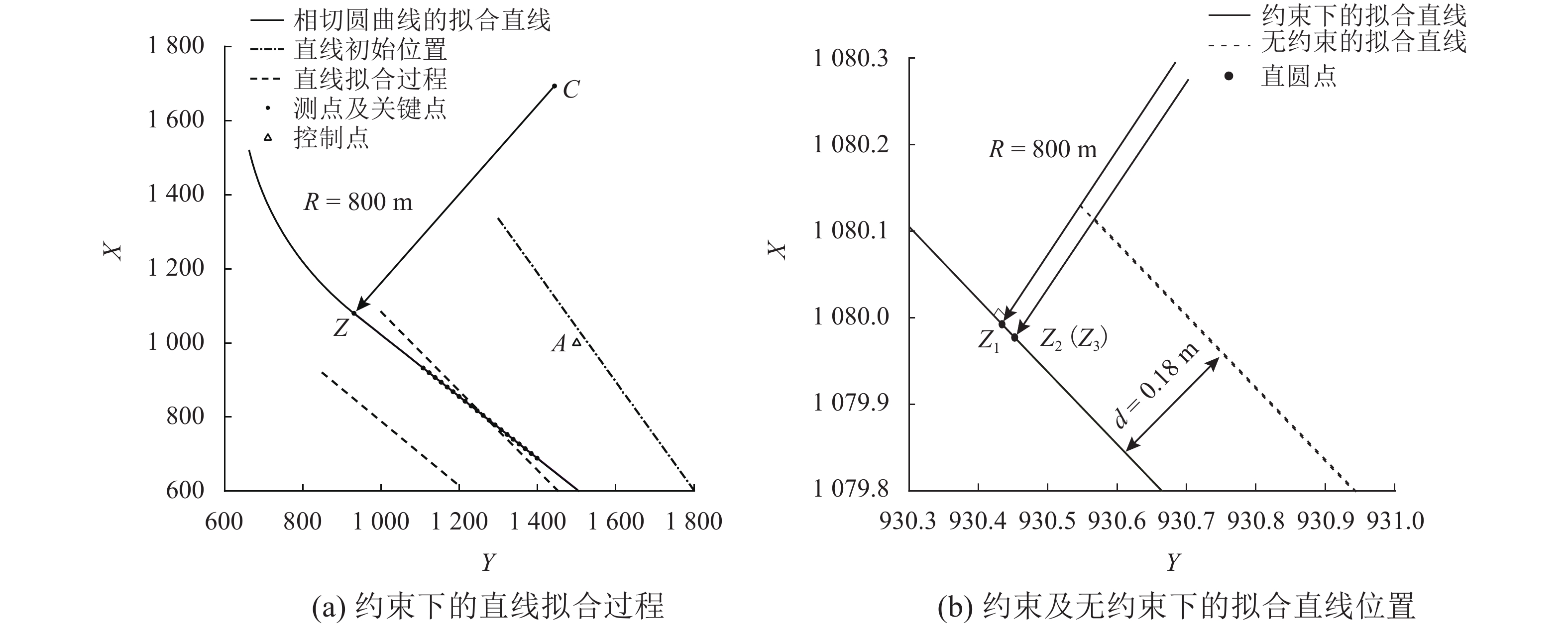
图 4 约束及无约束的直线拟合
Figure 4. Straight-line fitting with a constraint and without constraint
表 1 实地观测点坐标及采用的3种随机模型
Table 1. Coordinate pairs of field surveying data and three stochastic models for fitting
点号 x/m y/m C 中非零元素 P1 中非零元素 P2 中非零元素 P3 中非零元素 $\sigma _x^2$/mm2 $\sigma _y^2$/mm2 ${\sigma _{xy}}$/mm2 px py pxy ${p_x}/{p_y}$ ${p_x}/{p_y}$ 1 688.639 1398.869 7.3371 9.7881 −0.8902 0.1378 0.1033 0.0125 1 10000 2 701.467 1383.525 7.3289 9.3014 −0.9080 0.1381 0.1088 0.0135 1 10000 3 714.294 1368.180 7.3340 8.8888 −0.9115 0.1381 0.1140 0.0142 1 10000 4 727.121 1352.835 7.3547 8.5485 −0.9080 0.1378 0.1185 0.0146 1 10000 5 739.953 1337.495 7.3948 8.2767 −0.9044 0.1371 0.1225 0.0150 1 10000 6 752.783 1322.152 7.4602 8.0684 −0.9071 0.1359 0.1257 0.0153 1 10000 7 765.609 1306.806 7.5584 7.9166 −0.9210 0.1342 0.1281 0.0156 1 10000 8 778.434 1291.460 7.6977 7.8126 −0.9487 0.1319 0.1299 0.0160 1 10000 9 791.262 1276.115 7.8867 7.7477 −0.9909 0.1289 0.1312 0.0165 1 10000 10 804.088 1260.770 8.1340 7.7132 −1.0462 0.1251 0.1320 0.0170 1 10000 11 816.915 1245.425 8.4471 7.7012 −1.1111 0.1207 0.1324 0.0174 1 10000 12 829.740 1230.078 8.8323 7.7054 −1.1805 0.1156 0.1325 0.0177 1 10000 13 842.564 1214.731 9.2939 7.7206 −1.2485 0.1100 0.1324 0.0178 1 10000 14 855.389 1199.384 9.8346 7.7437 −1.3087 0.1040 0.1321 0.0176 1 10000 15 868.213 1184.036 10.4556 7.7729 −1.3546 0.0979 0.1316 0.0171 1 10000 16 881.043 1168.694 11.1562 7.8077 −1.3803 0.0916 0.1309 0.0162 1 10000 17 893.875 1153.353 11.9355 7.8489 −1.3806 0.0855 0.1301 0.0150 1 10000 18 906.703 1138.009 12.7917 7.8981 −1.3511 0.0796 0.1289 0.0136 1 10000 19 919.537 1122.670 13.7218 7.9569 −1.2880 0.0740 0.1276 0.0120 1 10000 20 932.371 1107.331 14.7236 8.0277 −1.1886 0.0687 0.1261 0.0102 1 10000  下载: 导出CSV
下载: 导出CSV
表 2 顾及约束和相关误差的直线拟合过程
Table 2. Process of straight-line fitting with both a constraint and correlated noise
迭代数/次 $\hat a$ $\hat b$/m ${\hat \sigma _0}$/mm ${\sigma _a}$ ${\sigma _b}$/mm w/mm 0 −0.681654264 2210.153480 59093.318880 6.14777 × 10−2 93044.287650 −479524.603400 1 −0.935165106 2013.498778 5844.096808 6.07990 × 10−3 9201.714082 −59428.755230 2 −1.146887043 2183.687057 448.743795 9.66425 × 10−4 1148.244207 −9789.990571 3 −1.195130784 2221.779805 10.362946 3.19907 × 10−5 35.137584 −394.045005 4 −1.197201392 2223.403509 16.492003 5.52543 × 10−5 59.714483 −0.691388 5 −1.197204886 2223.406205 16.525002 5.55595 × 10−5 60.003229 −0.000002 6 −1.197204886 2223.406205 16.525002 5.55598 × 10−5 60.003515 0
下载: 导出CSV
表 3 约束下3种随机模型拟合直线的参数估值及其精度
Table 3. Parameter estimation of fitting line and their precisions of three stochastic models with constraints
随机模型 $\hat a$ $\hat b$/m ${\hat \sigma _0}$/mm ${\sigma _a}$ ${\sigma _b}$/mm xZ/m yZ/m 迭代数/次 耗时/s P1 −1.19720489 2223.4062 16.525 5.55598 × 10−5 60.0 1079.9809 930.4478 6 0.494 P2 −1.19722236 2223.4251 49.031 6.12012 × 10−5 66.1 1079.9772 930.4522 6 0.503 P3 −1.19722233 2223.4250 76.478 6.12012 × 10−5 66.1 1079.9772 930.4522 6 0.496
下载: 导出CSV
表 4 无约束下3种随机模型拟合直线的参数估值及其精度
Table 4. Parameter estimation of line fitting and their precisions of three stochastic models without constraint
随机模型 $\hat a$ $\hat b$/m ${\hat \sigma _0}$/mm ${\sigma _a}$ ${\sigma _b}$/mm 迭代数/次 耗时/s P1 −1.196269322 2222.672000 2.293655 3.10233 × 10−5 25.008852 3 0.461 P2 −1.196259074 2222.663879 6.710739 3.16316 × 10−5 25.743943 3 0.414 P3 −1.196259065 2222.663872 0.462488 3.16316 × 10−5 25.743942 3 0.438
下载: 导出CSV
-
[1] KRYSTEK M, ANTON M. A least-squares algorithm for fitting data points with mutually correlated coordinates to a straight line[J]. Measurement Science and Technology, 2011, 22(3): 035101.1-035101.9. [2] PETROLINI A. Linear least squares fit when both variables are affected by equal uncorrelated errors[J]. American Journal of Physics, 2014, 82(12): 1178-1185. [3] 丁克良,沈云中,欧吉坤. 整体最小二乘法直线拟合[J]. 辽宁工程技术大学学报(自然科学版),2010,29(1): 44-47.DING Keliang, SHEN Yunzhong, OU Jikun. Methods of line-fitting based on total least-squares[J]. Journal of Liaoning Technical University (Natural Science), 2010, 29(1): 44-47. [4] 宋占峰,彭欣,吴清华. 基于中线坐标的地铁调线优化算法[J]. 西南交通大学学报,2014,49(4): 656-661. doi: 10.3969/j.issn.0258-2724.2014.04.015SONG Zhanfeng, PENG Xin, WU Qinghua. Optimization algorithm for horizontal realignment based on coordinate of metro centerline[J]. Journal of Southwest Jiaotong University, 2014, 49(4): 656-661. doi: 10.3969/j.issn.0258-2724.2014.04.015 [5] 宋占峰,王健,李军. 缓和曲线正交拟合的Levenberg-Marquardt算法[J]. 西南交通大学学报,2020,55(1): 144-149. doi: 10.3969/j.issn.0258-2724.20190130SONG Zhanfeng, WANG Jian, LI Jun. Levenberg-Marquardt algorithm for orthogonal fitting of transition curves[J]. Journal of Southwest Jiaotong University, 2020, 55(1): 144-149. doi: 10.3969/j.issn.0258-2724.20190130 [6] KARL P. On lines and planes of closest fit to systems of points in space[J]. Philosophical Magazine, 1901, 2(11): 559-572. [7] 刘经南,曾文宪,徐培亮. 整体最小二乘估计的研究进展[J]. 武汉大学学报(信息科学版),2013,38(5): 505-512.LIU Jingnan, ZENG Wenxian, XU Peiliang. Overview of total least squares methods[J]. Geomatics and Information Science of Wuhan University, 2013, 38(5): 505-512. [8] KRYSTEK M, ANTON M. A weighted total least-squares algorithm for fitting a straight line[J]. Measurement Science and Technology, 2007, 18(11): 3438-3442. doi: 10.1088/0957-0233/18/11/025 [9] SONG Z F, DING H, LI J, et al. Circular curve-fitting method for field surveying data with correlated noise[J]. Journal of Surveying Engineering, 2018, 144(4): 04018010.1-04018010.9. [10] AMIRI-SIMKOOEI A R, ZANGENEH-NEJAD F, ASGARI J, et al. Estimation of straight line parameters with fully correlated coordinates[J]. Measurement, 2014, 48: 378-386. doi: 10.1016/j.measurement.2013.11.005 [11] SHEN Y F, LI B F, CHEN Y. An iterative solution of weighted total least-squares adjustment[J]. Journal of Geodesy, 2011, 85(4): 229-238. doi: 10.1007/s00190-010-0431-1 [12] 鲁铁定,陶本藻,周世健. 基于整体最小二乘法的线性回归建模和解法[J]. 武汉大学学报(信息科学版),2008,33(5): 504-507.LU Tieding, TAO Benzao, ZHOU Shijian. Modeling and algorithm of linear regression based on total least squares[J]. Geomatics and Information Science of Wuhan University, 2008, 33(5): 504-507. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 615
- HTML全文浏览量: 328
- PDF下载量: 25
- 被引次数: 0