

Impact of Sudden Change of Wind Loads on Running Performance of Vehicle on Bridge with Wind Barriers
-
摘要: 为研究列车进出风屏障段时所受突风效应的影响,以一高速铁路多跨简支梁桥为研究对象,通过风洞试验测试了风屏障在100.0%、43.5%和0透风率情况下车-桥系统的气动特性;基于哑元耦合法,建立了风-车-桥系统分析模型,开展了两种风屏障布置形式(通长和非通长)时风屏障透风率和列车车速对列车动力响应的影响分析. 研究结果表明:设置风屏障时桥上列车的气动特性存在较大差异,尤其列车气动阻力系数在风屏障透风率0比透风率100.0%时减少87%;当风屏障通长布置时,风屏障防风效果显著,随着透风率的减小,列车动力响应大幅减小,其中轮重减载率减小达53%;当风屏障非通长布置情况时,列车在进入和离开风屏障区段时,突风效应对列车的横向加速度和竖向加速度均影响显著,透风率越低,加速度响应变化越剧烈,但对于轮轴横向力和轮重减载率的影响有限;随着车速的提高,突风效应造成的加速度响应总体上增大,呈明显的非线性变化.Abstract: To investigate the impact of sudden change of wind loads on a vehicle passing through the transition section with wind barriers, a multi-span simply-supported beam bridge of high-speed railway was taken as the research object. Aerodynamic characteristics of the vehicle-bridge system were studied by wind tunnel tests under three wind barrier porosities of 100.0%, 43.5% and 0. Based on the dummy body coupling (DBC) method, a wind-vehicle-bridge coupling simulation model was established. Effects of wind barrier porosities and vehicle operation speeds on the vehicle dynamic responses were analyzed with two types of wind barriers setting (continuously and non-continuously). The results show that aerodynamic characteristics of the vehicle change obviously due to the setting of wind barriers. Compared to the 100.0% wind barrier porosity condition, the drag coefficient of vehicle decreases 87% under the condition of 0 wind barrier porosity. The wind barriers set continuously have obvious wind shielding effects. With the decrease of the wind barrier porosities, the vehicle dynamic responses decrease greatly, and the wheel load reduction rate reaches 53%. With the wind barriers set non-continuously, the sudden change of wind loads has great effects on the lateral and vertical accelerations of the vehicle when it enters and leaves the wind barrier section. The lower the porosity of wind barriers is, the more violent the change of the acceleration response is, but the impact on the lateral force of the wheel axle and the wheel load reduction rate is limited. With the vehicle speed increasing, the responses of acceleration generally increase due to the sudden change of wind loads, in an obviously non-linear trend.
-
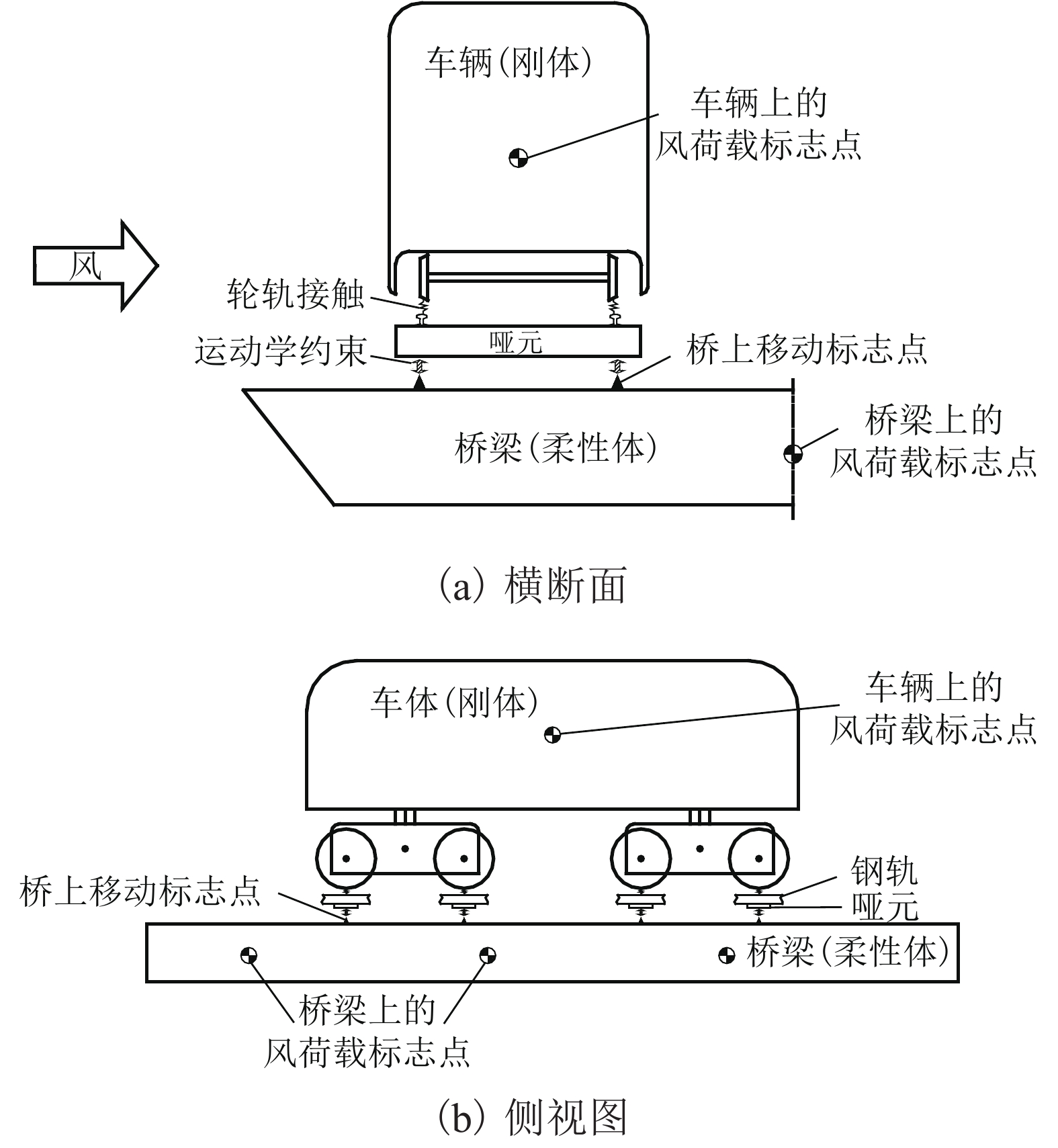
图 2 基于哑元耦合法的风-车-桥系统分析模型
Figure 2. Wind-vehicle-bridge system model based on DBC (dummy body coupling) method

图 5 通长布置风屏障对车辆动力响应影响
Figure 5. Influences of continuous wind barriers on dynamic responses of vehicle

图 6 非通长布置风屏障对车辆动力响应影响
Figure 6. Influences of non-continuous wind barriers on dynamic responses of vehicle
表 1 列车气动力系数
Table 1. Aerodynamic coefficients of vehicle
透风率/% 阻力系数 CD 升力系数 CL 扭矩系数 CM 100.0 1.710 0.739 −0.098 43.5 1.082 0.554 −0.089 0 0.230 −0.024 0.017  下载: 导出CSV
下载: 导出CSV
表 2 通长布置风屏障不同透风率下列车的动力响应
Table 2. Dynamic responses of vehicle at different porosities of continuous wind barriers
风屏障透风率/% 横向加速度/
(m•s−2)竖向加速度/
(m•s−2)轮轴横向力/kN 轮重减载率 脱轨系数 横向 Sperling
指标竖向 Sperling
指标100.0 0.939 7 0.881 2 23.46 0.585 8 0.203 0 2.300 5 1.957 3 43.5 0.710 8 0.817 4 17.42 0.434 4 0.140 4 2.199 9 1.887 2 0 0.673 6 0.742 4 13.29 0.275 5 0.104 5 2.150 7 1.871 0
下载: 导出CSV
表 3 非通长布置风屏障不同透风率下列车的动力响应
Table 3. Dynamic responses of vehicle at different porosities of non-continuous wind barriers
中间段风屏障透风率/% 横向加速度/
(m•s−2)竖向加速度/
(m•s−2)轮轴横向力/kN 轮重减载率 脱轨系数 横向Sperling
指标竖向Sperling
指标100.0 0.9397 0.8812 23.46 0.585 8 0.203 0 2.300 5 1.957 3 43.5 0.9135 0.8832 23.02 0.585 8 0.198 8 2.285 1 1.933 7 0 1.0500 0.8511 22.60 0.585 8 0.194 5 2.292 5 1.973 6
下载: 导出CSV
表 4 不同车速下列车的动力响应
Table 4. Dynamic responses of vehicle at different operation speeds
透风率/% 车速/
(km•h−1)横向加速度/
(m•s−2)竖向加速度/
(m•s−2)轮轴横
向力/kN轮重减载率 脱轨系数 横向 Sperling
指标竖向 Sperling
指标43.5 150 0.830 8 0.790 0 20.30 0.501 1 0.161 3 2.081 9 1.928 7 175 0.934 6 0.807 7 21.68 0.525 0 0.168 7 2.172 3 1.876 6 200 0.913 5 0.883 2 23.02 0.585 8 0.198 8 2.285 1 1.933 7 225 0.952 0 0.740 6 22.13 0.586 6 0.182 0 2.372 3 2.022 6 250 1.331 2 0.927 4 30.72 0.683 0 0.244 1 2.558 4 2.111 7 0 150 1.229 8 0.823 7 23.43 0.554 9 0.188 9 2.077 3 1.963 9 175 1.543 0 0.984 8 20.98 0.532 6 0.172 6 2.206 7 1.933 0 200 1.050 0 0.851 1 22.60 0.585 8 0.194 5 2.292 5 1.973 6 225 1.127 2 0.894 7 26.04 0.591 4 0.198 9 2.387 3 2.016 9 250 1.435 9 1.036 2 30.48 0.683 0 0.247 0 2.592 4 2.210 0
下载: 导出CSV
表 5 列车气动力系数变化量对比
Table 5. Comparison on aerodynamic coefficient variations of vehicle
透风率/% δD δL 43.5 0.628 0.185 0 1.480 0.763
下载: 导出CSV
-
CAI C S, HU J X, CHEN S R, et al. A coupled wind-vehicle-bridge system and its applications:a review[J]. Wind and Structures, 2015, 20(2): 117-142. doi: 10.12989/was.2015.20.2.117 JOHNSON T. Strong wind effects on railway operations—16th October 1987[J]. Journal of Wind Engineering and Industrial Aerodynamics, 1996, 60: 251-266. doi: 10.1016/0167-6105(96)00038-4 FUJII T, MAEDA T, ISHIDA H, et al. Wind-induced accidents of train/vehicles and their measures in Japan[J]. Quarterly Report of RTRI, 1999, 40(1): 50-55. doi: 10.2219/rtriqr.40.50 李永乐,向活跃,强士中. 风-列车-桥系统耦合振动研究综述[J]. 中国公路学报,2018,31(7): 24-37. doi: 10.3969/j.issn.1001-7372.2018.07.002LI Yongle, XIANG Huoyue, QIANG Shizhong. Review on coupling vibration of wind-vehicle-bridge systems[J]. China Journal of Highway and Transport, 2018, 31(7): 24-37. doi: 10.3969/j.issn.1001-7372.2018.07.002 CHU C R, CHANG C Y, HUANG C J, et al. Windbreak protection for road vehicles against crosswind[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2013, 116: 61-69. doi: 10.1016/j.jweia.2013.02.001 OGUETA-GUTIÉRREZ M, FRANCHINI S, ALONSO G. Effects of bird protection barriers on the aerodynamic and aeroelastic behaviour of high speed train bridges[J]. Engineering Structures, 2014, 81: 22-34. doi: 10.1016/j.engstruct.2014.09.035 郭薇薇,夏禾,张田. 桥梁风屏障的气动效应及其对高速列车运行安全的影响分析[J]. 工程力学,2015,32(8): 112-119. doi: 10.6052/j.issn.1000-4750.2014.11.0062GUO Weiwei, XIA He, ZHANG Tian. Analysis on aerodynamic effects of bridge wind barrier and its influence on running safety of a high-speed train[J]. Engineering Mechanism, 2015, 32(8): 112-119. doi: 10.6052/j.issn.1000-4750.2014.11.0062 向活跃,李永乐,苏洋,等. 铁路风屏障防风效果代理模型优化[J]. 西南交通大学学报,2016,51(6): 1098-1104. doi: 10.3969/j.issn.0258-2724.2016.06.008XIANG Huoyue, LI Yongle, SU Yang, et al. Surrogate model optimizations for protective effects of railway wind barriers[J]. Journal of Southwest Jiaotong University, 2016, 51(6): 1098-1104. doi: 10.3969/j.issn.0258-2724.2016.06.008 XIANG H Y, LI Y L, CHEN S R, et al. Wind loads of moving vehicle on bridge with solid wind barrier[J]. Engineering Structures, 2018, 156: 188-196. doi: 10.1016/j.engstruct.2017.11.009 HE X H, ZHOU L, CHEN Z W, et al. Effect of wind barriers on the flow field and aerodynamic forces of a train–bridge system[J]. Proceedings of the Institution of Mechanical Engineers,Part F:Journal of Rail and Rapid Transit, 2019, 233(3): 283-297. doi: 10.1177/0954409718793220 LI Y L, XU X Y, ZHOU Y, et al. An interactive method for the analysis of the simulation of vehicle–bridge coupling vibration using ANSYS and SIMPACK[J]. Proceedings of the Institution of Mechanical Engineers,Part F:Journal of Rail and Rapid Transit, 2018, 232(3): 663-679. doi: 10.1177/0954409716684277 徐昕宇. 复杂山区铁路风-车-桥系统耦合振动研究[D]. 成都: 西南交通大学, 2017. DIETZ S, HIPPMANN G, SCHUPP G. Interaction of vehicles and flexible tracks by co-simulation of multibody vehicle systems and finite element track models[J]. Vehicle System Dynamics, 2002, 37(S1): 372-384. ROSE M, KEIMER R, BREITBACH E J, et al. Parallel robots with adaptronic components[J]. Journal of Intelligent Material Systems and Structures, 2004, 15(9/10): 763-769. WALLRAPP O. Standardization of flexible body modeling in multibody system codes,part I:definition of standard input data[J]. Journal of Structural Mechanics, 1994, 22(3): 283-304. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 831
- HTML全文浏览量: 389
- PDF下载量: 24
- 被引次数: 0