

Design and Experiment of Comprehensive Alternating Pressure Testing Machine
-
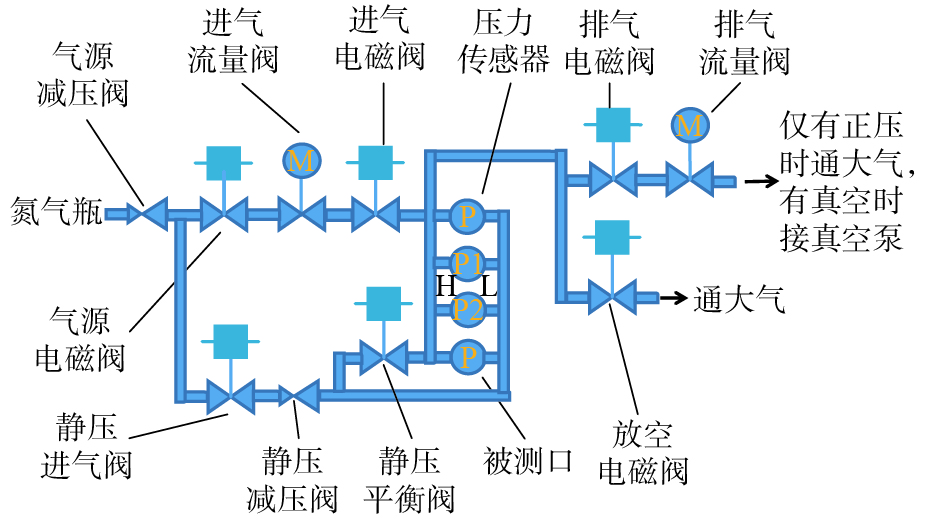
摘要: 由于目前活塞往复式交变试验机无法对气体介质压力仪表、真空仪表、正负压压力仪表及差压类压力仪表在静压环境下进行交变试验,设计了能在上述环境下进行交变试验的全压式交变机. 首先按照一般压力表、精密压力表和数字压力计型评大纲中对交变试验要求的上限、下限、频率和次数等参数进行分析;其次通过对可产生正弦压力波的发生装置进行选型,通过计数器采集正弦波频率,并控制进气电磁阀在规定的交变次数内试验自动停止. 样机试验结果表明:通过可控进、出气电磁阀产生的压力正弦波上限、下限和频率范围覆盖型评大纲要求的范围,上、下限控制误差不大于0.3%;通过可控进、出气流量阀控制的交变频率误差为型评大纲要求的不大于 ± 5次/min;计数模块统计次数与实际试验次数一致.Abstract: At present, the piston reciprocating alternating testing machine can not be used in the alternating tests for gas medium pressure instruments, vacuum instruments, positive and negative pressure gauges and differential pressure instruments under a static pressure environment. A comprehensive alternating pressure testing machine was designed to operate under this environment. Firstly, according to the upper and lower limits of the alternating test requirements for general pressure gauges, precision pressure gauges and digital pressure gauges, frequency and times parameters are analyzed. Secondly, the sinusoidal pressure pulse generator is selected, the sinusoidal frequency is collected by a counter, and the inlet solenoid valve is controlled to automatically stop testing within the preset alternating times. The experimental results of the designed prototype show that the upper limit, lower limit and frequency range of the pressure sine wave produced by the controllable inlet and outlet solenoid valves fall in the range of the evaluation program, and the control error between upper and lower limited data is limited as 0.3%.The alternating frequency error by the controllable inlet and outlet flow valves shall be no more than ± 5 times/min, which meets the requirement of the evaluation program. The number recorded by the counter is consistent with the number of actual tests.
-
Key words:
- alternating pressure test /
- solenoid valve /
- automatic control
-
丁跃清. –0.1~60 MPa正弦交变压力试验机的设计[J]. 计量技术,1993(5): 25-26. 刘希文,林英. ZYS—1型自动正弦压力试验机[J]. 仪表技术与传感器,1991(3): 18-19, 41. 刘浩峰,李雁灵,汪帅,等. 机器视觉自动监控仪表交变压力试验[J]. 中国测试技术,2007(6): 75-76, 140.LIU Haofeng, LI Yanling, WANG Shuai, et al. Design auto-monitoring system for gauge alternative pressure test based on machine vision technology[J]. China Measurement Technology, 2007(6): 75-76, 140. 凌永发,王杰. 压力传感器的选择与应用[J]. 云南民族学院学报(自然科学版),2003(3): 192-194.LING Yongfa, WANG Jie. The selection and appliance of the force transducer[J]. Journal of Yunnan University for Nationalities (Natural Science Edition), 2003(3): 192-194. 吴万荣,田广天,郝前华. 高频交变压力下先导式溢流阀响应特性研究[J]. 工程设计学报,2018,25(6): 718-724. doi: 10.3785/j.issn.1006-754X.2018.06.014WU Wanrong, TIAN Guangtian, HAO Qianhua. Study on response characteristics of pilot relief valve under high frequency alternating pressure[J]. Chinese Journal of Engineering Design, 2018, 25(6): 718-724. doi: 10.3785/j.issn.1006-754X.2018.06.014 杨洪柏,谢文华. 燃油泵总成管路交变压力试验机的研制[J]. 液压气动与密封,2001(6): 19-21. doi: 10.3969/j.issn.1008-0813.2001.06.007YANG Hongbai, XIE Wenhua. Development of fuel pump pipeline pressure pulsation test machine[J]. Hydraulics Pnenmatics & Seals, 2001(6): 19-21. doi: 10.3969/j.issn.1008-0813.2001.06.007 汪立新. 压力交变试验控制系统研究[D]. 杭州: 浙江大学, 2008. 严春平. 交变压力试验台控制系统研究与设计[D]. 荆州: 长江大学, 2012. 翟庆钟,冯静安,王卫兵,等. 基于PWM技术的 比例电磁阀的控制方法[J]. 中国农机化学报,2015,36(1): 71-73, 77.ZHAI Qingzhong, FENG Jing’an, WANG Weibing, et al. Control method of proportional electromagnetic valve based on PWM technology[J]. Journal of Chinese Agricultural Mechanization, 2015, 36(1): 71-73, 77. 翁寅生. 基于STM32的电磁阀控制电路研究[J]. 筑路机械与施工机械化,2012,29(4): 89-92. doi: 10.3969/j.issn.1000-033X.2012.04.027WENG Yinsheng. Study on solenoid valve control circuit based on STM32[J]. Road Machinery & Construction Mechanization, 2012, 29(4): 89-92. doi: 10.3969/j.issn.1000-033X.2012.04.027 翁寅生. 基于L9352B的电磁阀控制电路设计与实现[J]. 电子技术应用,2012,38(4): 53-55. doi: 10.3969/j.issn.0258-7998.2012.04.017WENG Yinsheng. Design and implementation of solenoid valve control circuit based on L9352B[J]. Application of Electronic Technique, 2012, 38(4): 53-55. doi: 10.3969/j.issn.0258-7998.2012.04.017 王海峰. 基于模糊自适应PID控制的可控波形压力交变系统研究与设计[D]. 上海: 上海交通大学, 2007. 国家质量监督检验检疫总局. 弹性元件式一般压力表、压力真空表和真空表型式评价大纲: JJF 1415—2013[S]. 北京: 中国计量出版社, 2013. -

 下载:
下载:

 点击查看大图
点击查看大图
图(5)
计量
- 文章访问数: 622
- HTML全文浏览量: 253
- PDF下载量: 8
- 被引次数: 0