

Dynamic Planning Method for Indoor-Fire Escape Path Based on Navigation Grid
-
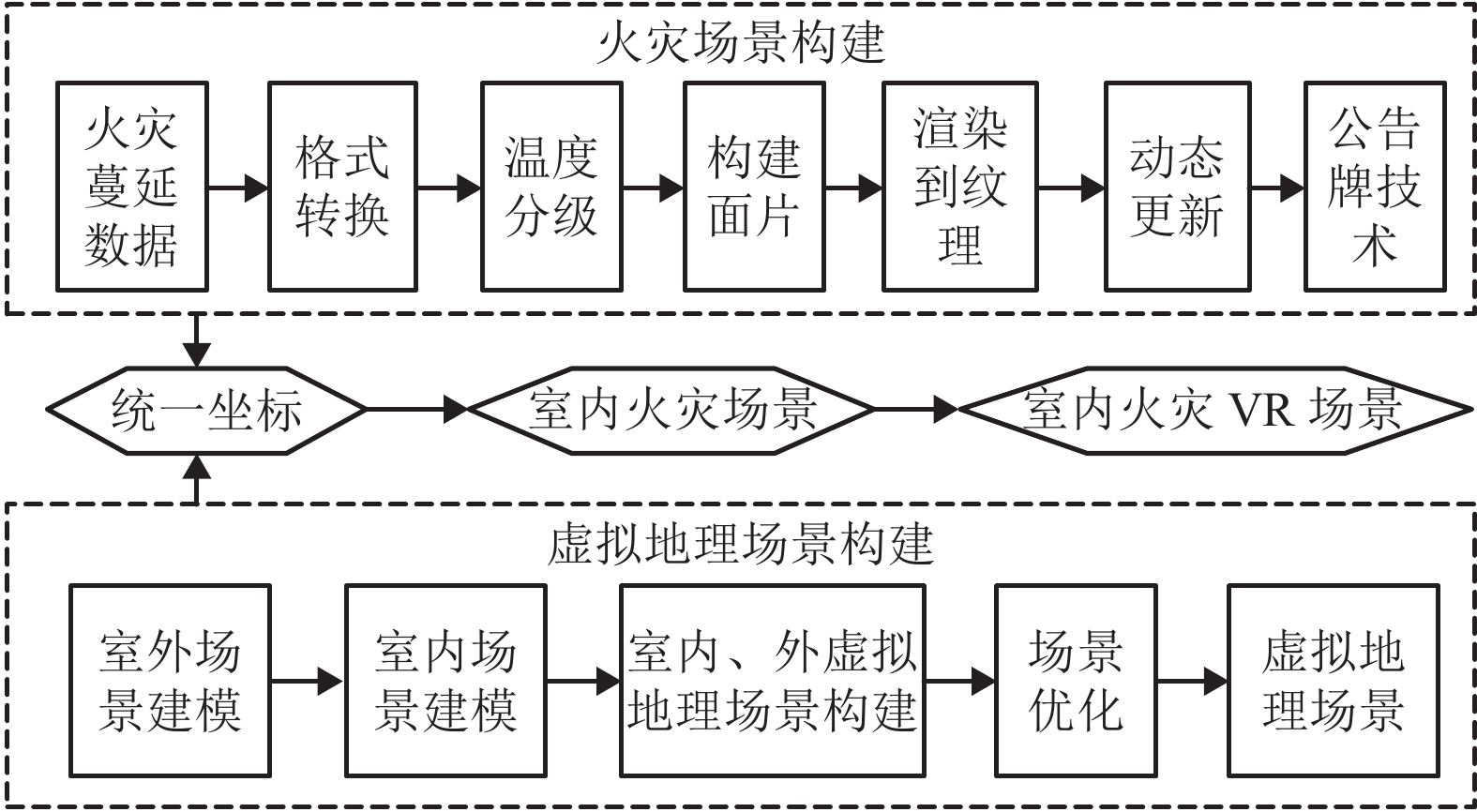
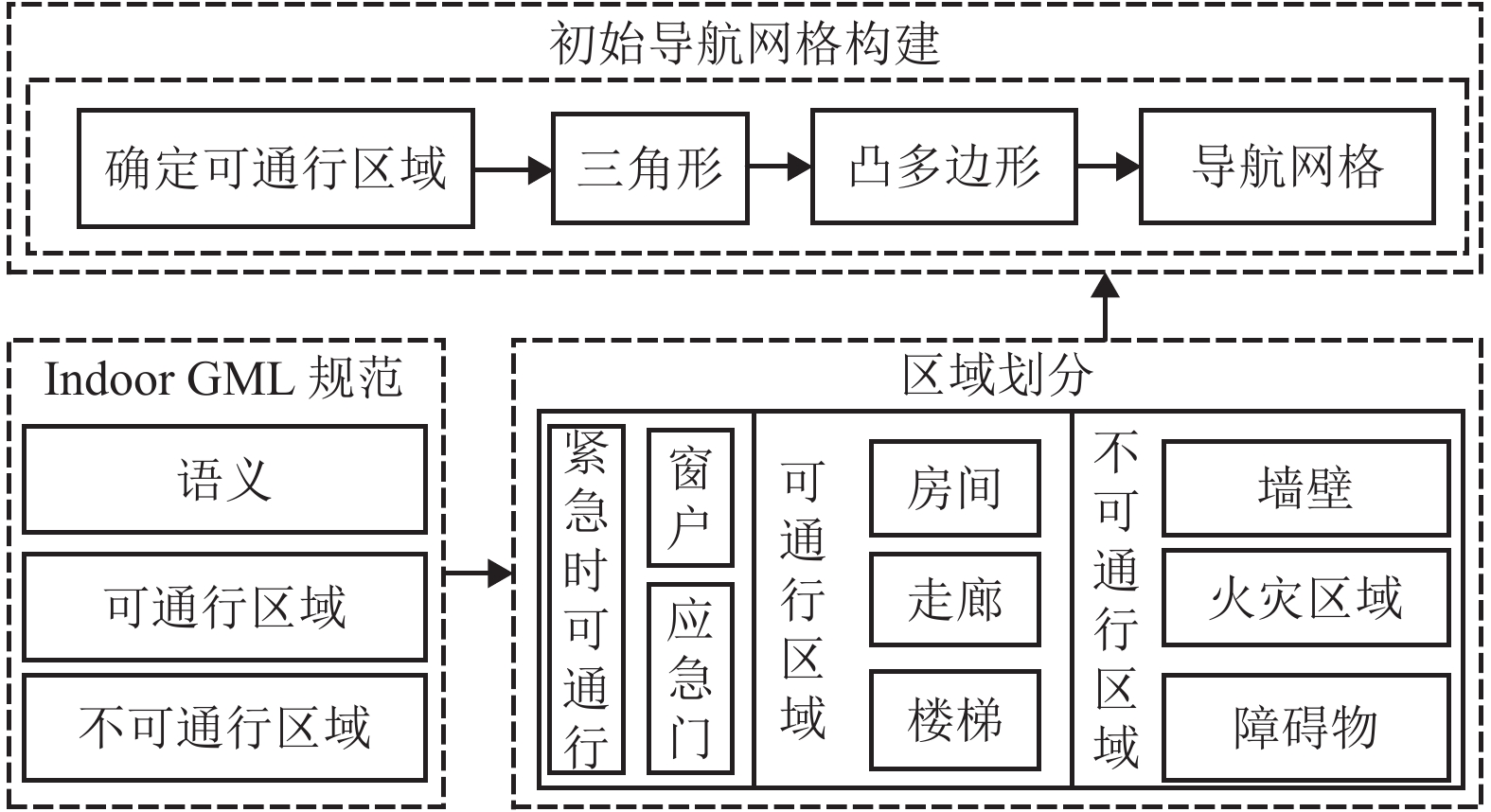
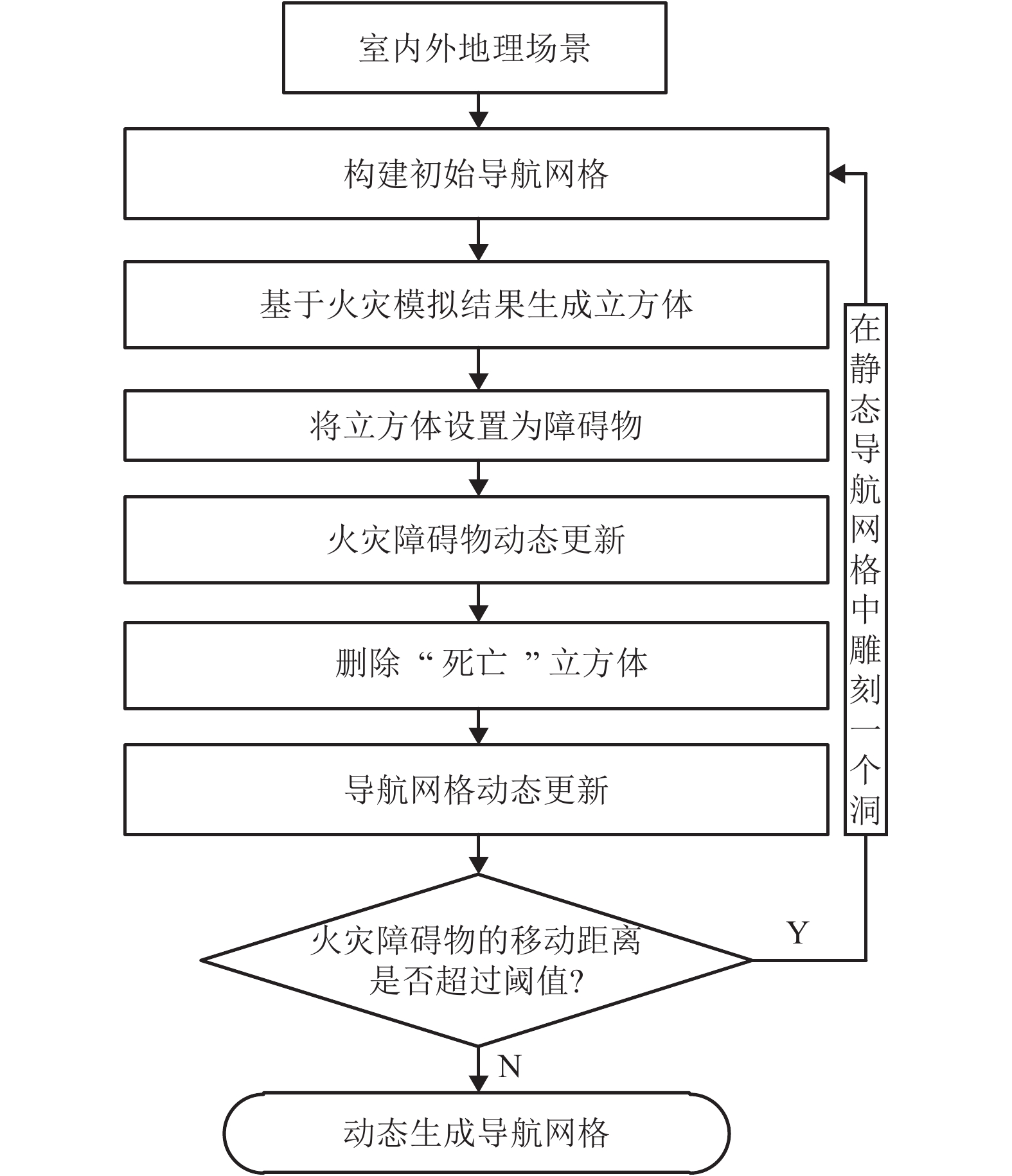
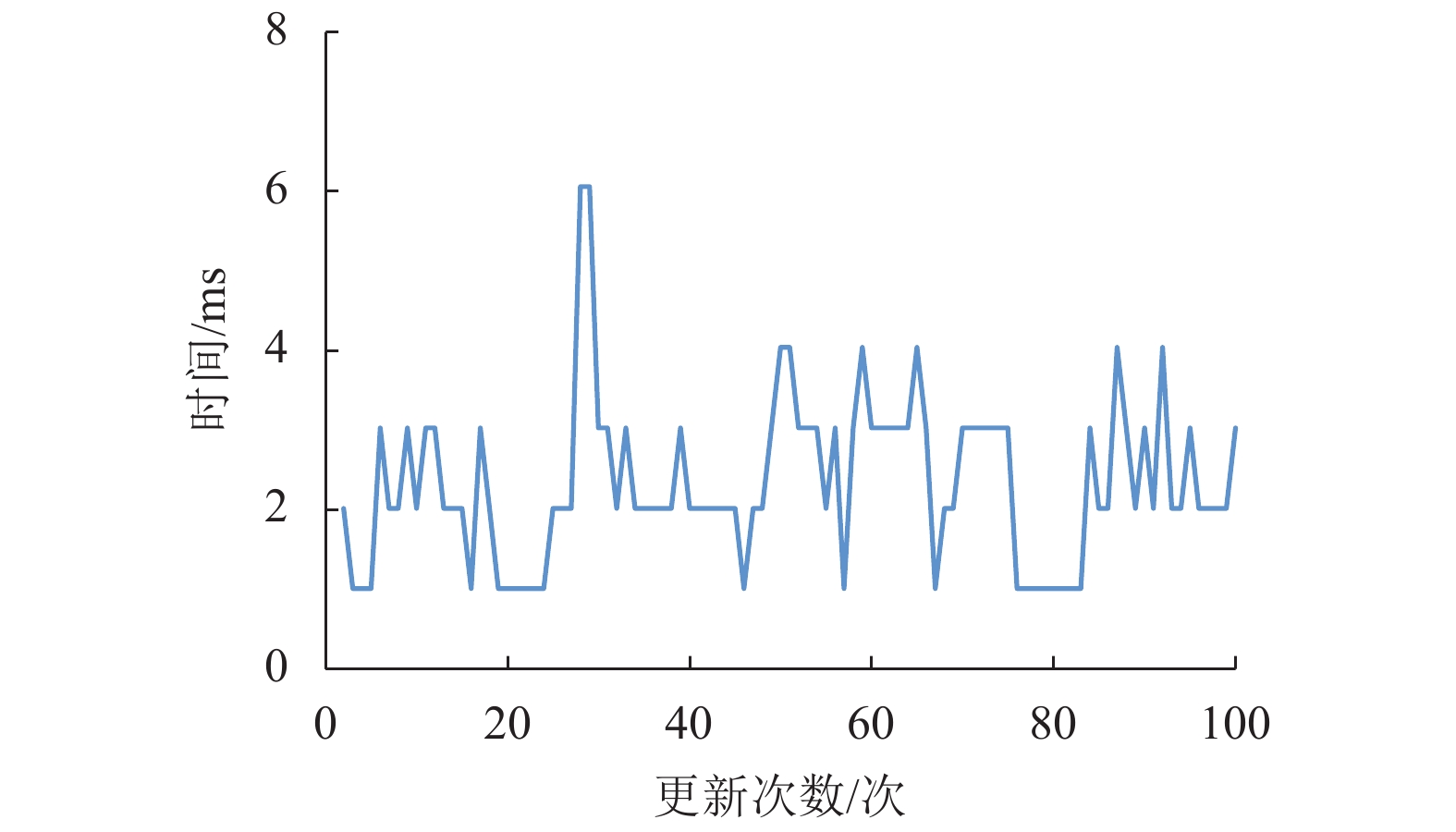
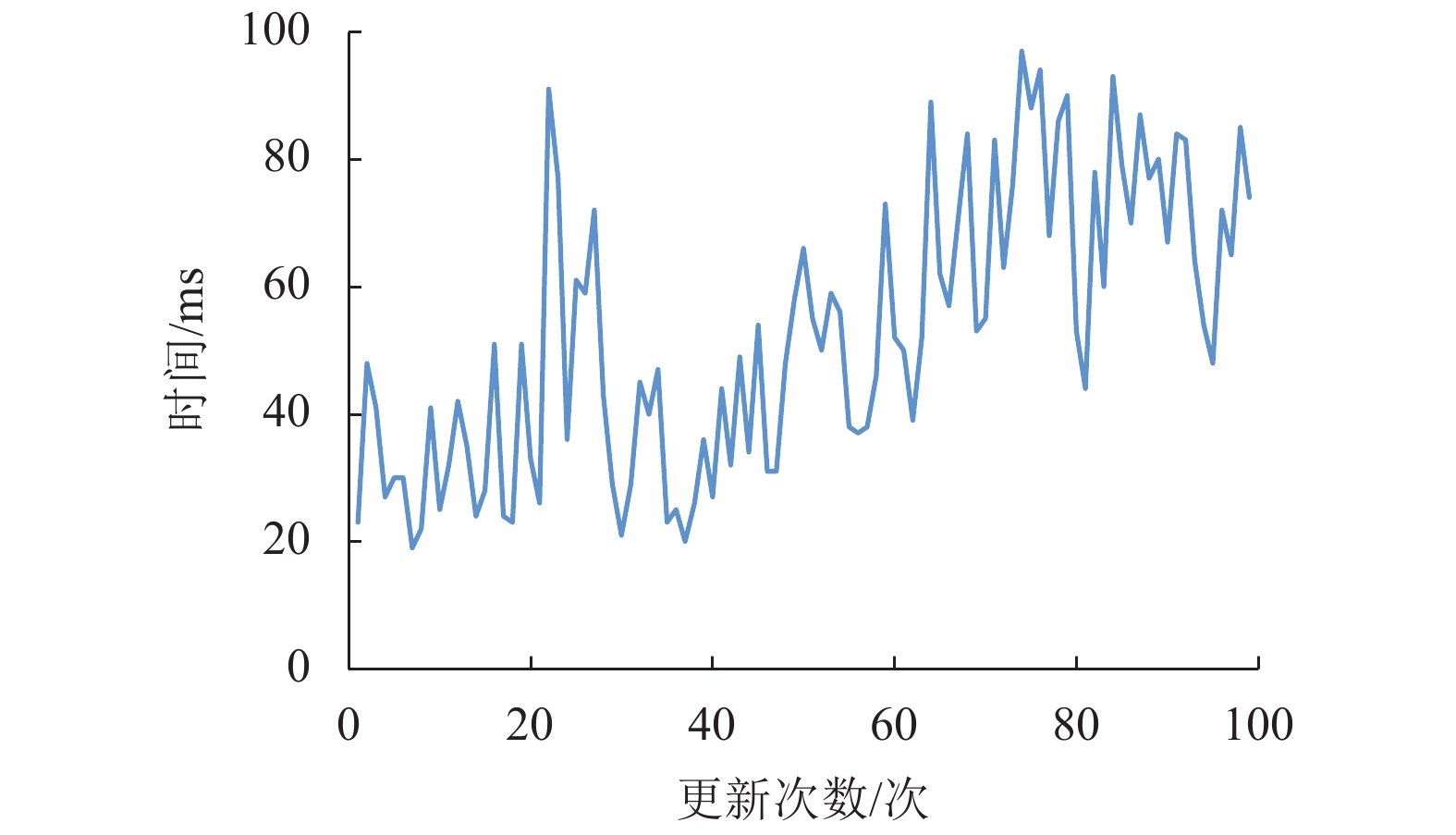
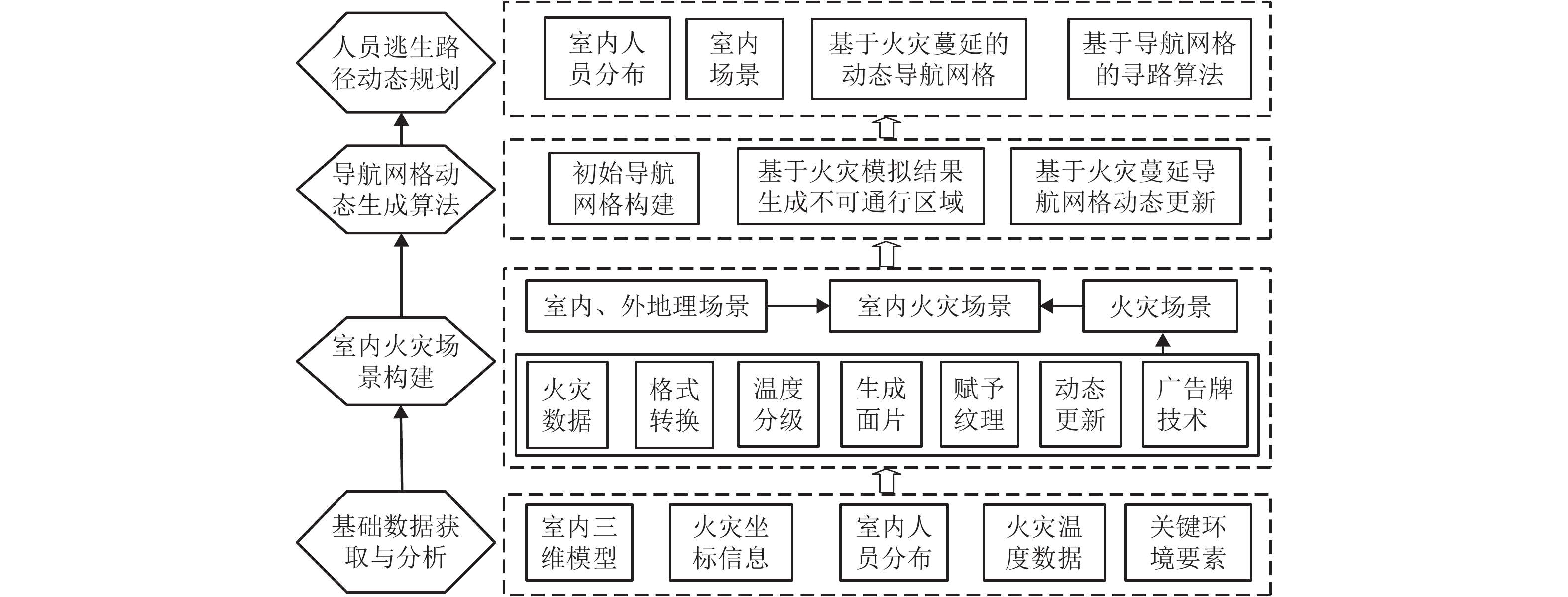
摘要: 为了解决现有虚拟现实(virtual reality,VR)场景中室内火灾逃生路径规划静态、低效的问题,基于VR场景中的导航网格,提出了室内火灾真实感表达方法,构建了室内火灾VR场景;其次根据VR场景创建了初始导航网格,设计了导航网格动态生成算法,建立了室内火灾逃生路径动态规划方法;最后构建了原型系统,并选择某产业园展厅作为案例开展了实验分析. 实验结果表明:融合静态地理场景与动态火灾场景,能构建室内火灾VR场景;导航网格每次更新时间在10 ms内,逃生路径规划的每次更新时间平均为50 ms左右,可支持室内火灾逃生路径的动态规划.Abstract: Existing escape path planning methods for indoor fire in virtual reality (VR) have some deficiencies such as static planning and low efficiency. To solve the these problems, the dynamic planning of indoor-fire escape path was explored with the use of the navigation grid in VR scene. First, a photorealistic visualization method of indoor fire was proposed and a VR scene of indoor fire was constructed. Second, a construction algorithm of initial navigation was created and its dynamic generation algorithm was designed. Then the dynamic planning method for indoor-fire escape path was established. Finally, a prototype system was developed and the exhibition hall in an industrial park was selected for experimental analysis. The experimental results show that the static geographic scene and dynamic fire scene can be combined to construct an indoor-fire VR scene, and the proposed method can dynamically plan escape paths of indoor fire. The navigation grid can be updated within 10 m, and the average time of each escape path planning is about 50 ms.
-
Key words:
- indoor fire /
- virtual reality /
- navigation grid /
- escape path /
- dynamic planning
-
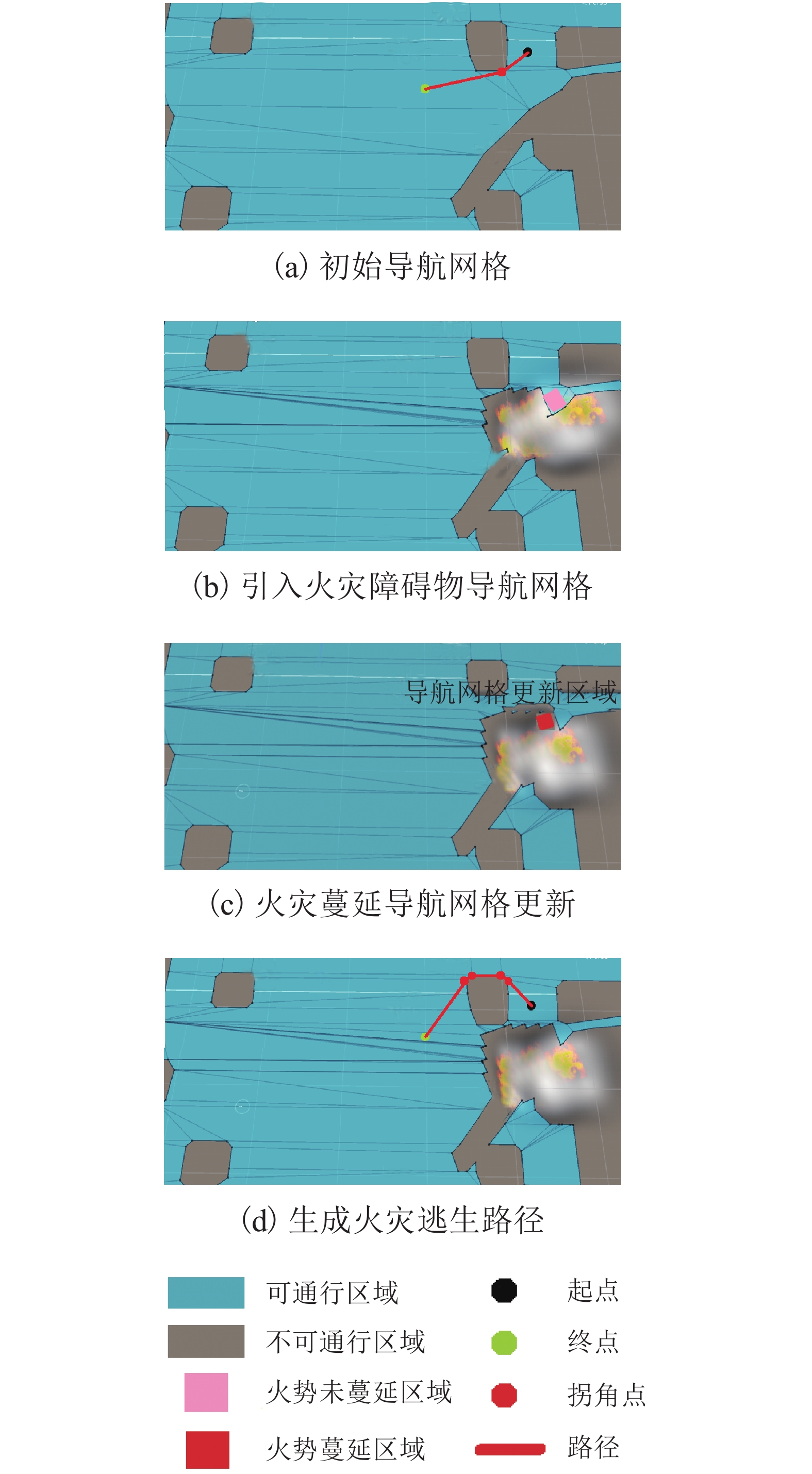
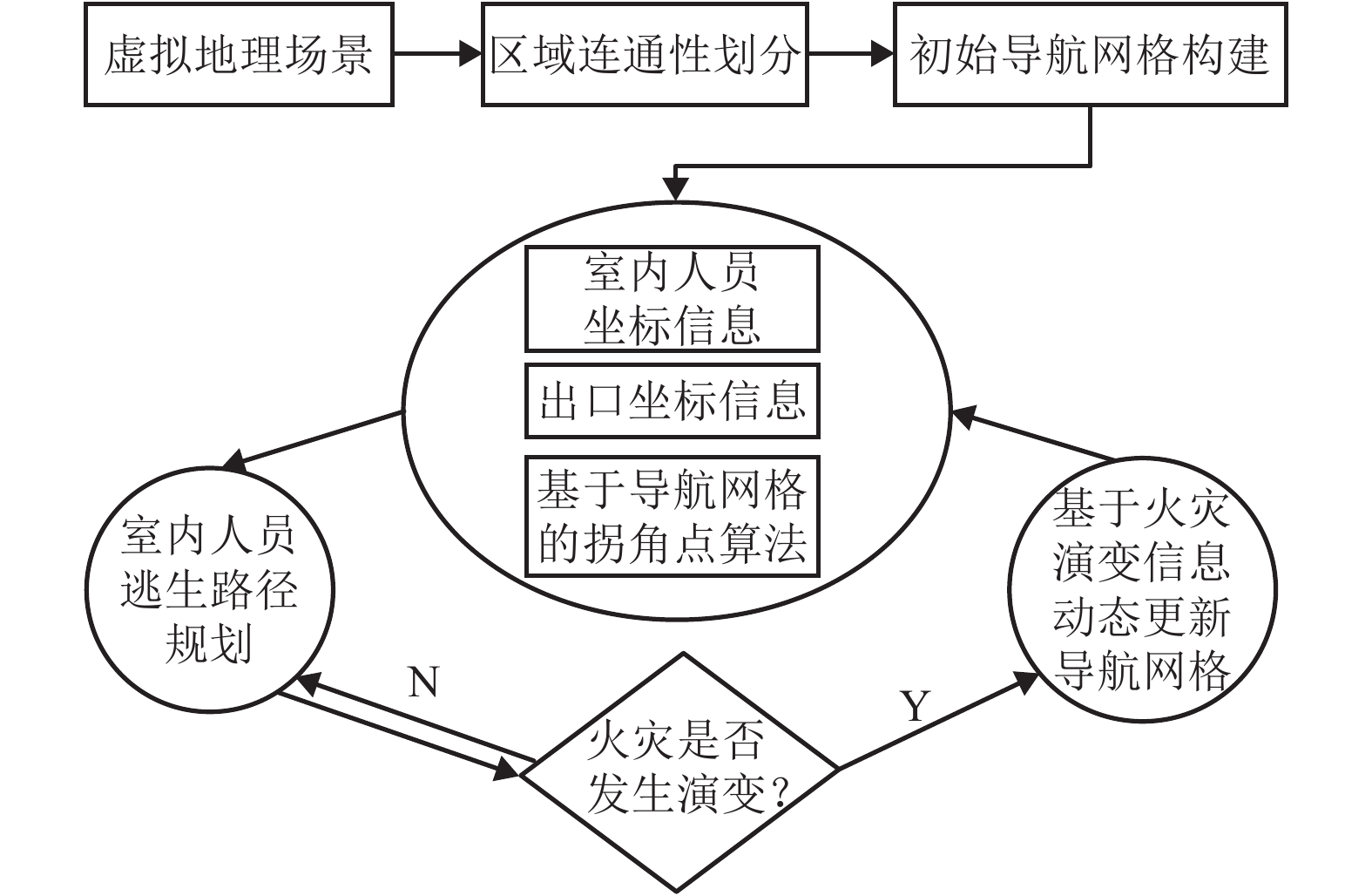
图 6 基于导航网格更新的逃生路径动态规划
Figure 6. Dynamic planning of escape path using navigation grid updating
表 1 系统开发环境配置
Table 1. Configuration of system development environment
软件设备 环境配置 详细信息 硬件 CPU 2 × Intel Xeon E5-2760 (40核) 内存 64 GB 显卡显存 Quadro K5000图形显卡 3 GB VR设备 HTC VIVE 软件 系统 Windows 7 SP1 软件 U3D、SteamVR、VS 2017  下载: 导出CSV
下载: 导出CSV
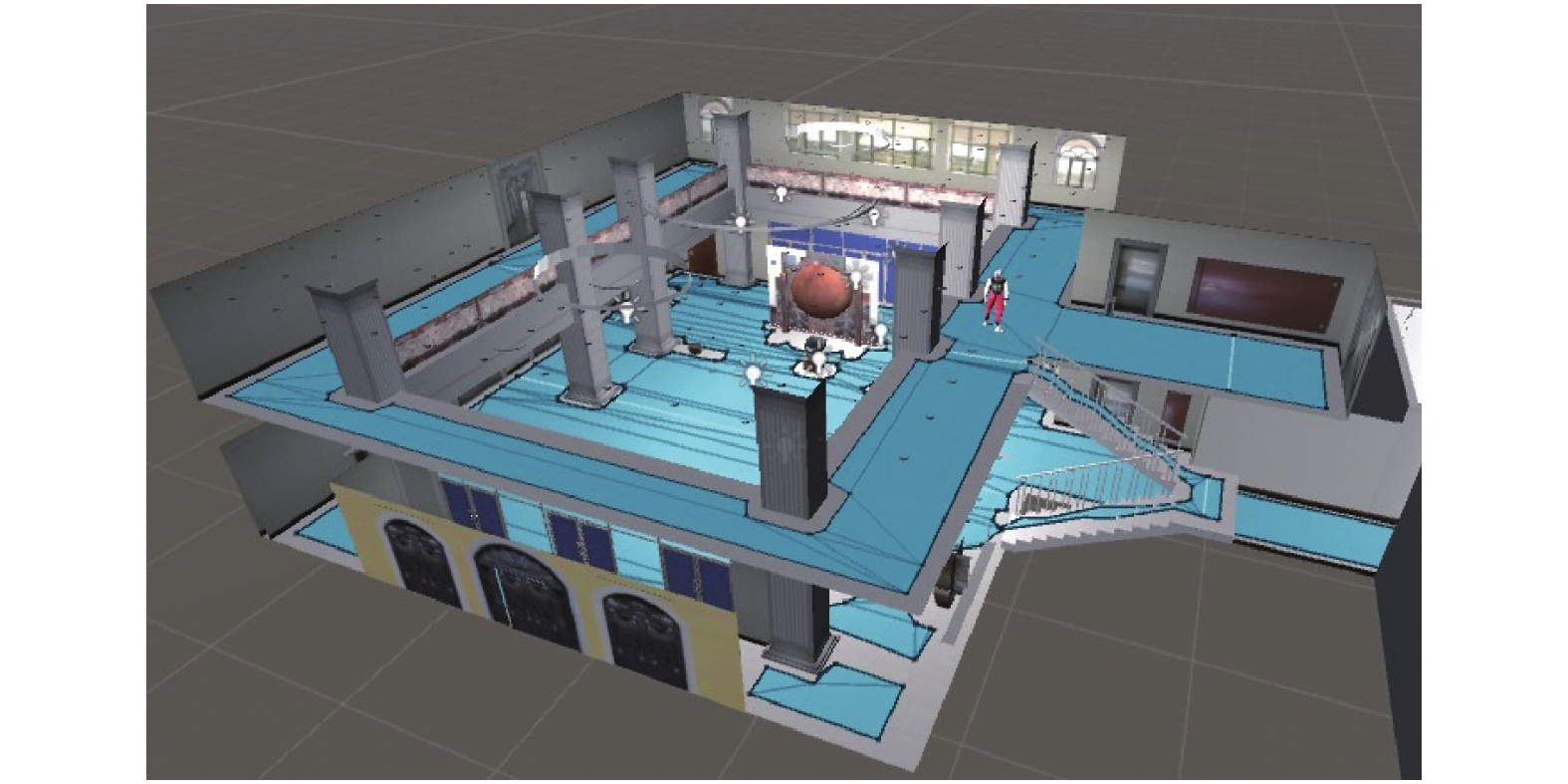
表 2 展厅室内物体信息
Table 2. Information on indoor objects in the exhibition hall
物品名称 数量 区域类型 地板/块 4 可行走 盆景/个 5 不可行走 花瓶/个 3 不可行走 宣传栏/个 21 不可行走 柱子/个 8 不可行走 门/道 13 可行走 护栏/个 8 不可行走 应急门/道 5 紧急时可通行 椅子/个 62 不可行走 桌子/个 45 不可行走 宣传栏/个 16 不可行走 窗户/个 19 紧急时通行 楼梯/个 1 可行走 装饰物/个 3 不可行走
下载: 导出CSV
-
汪杰. 传感器及其在火灾监测过程中的应用之浅见[J]. 中国科技博览,2014(24): 279-279. 陈立峰. 宁夏消防应急救援工作形势、现状及应对策略[J]. 中国安全生产科学技术,2012,8(8): 176-179.CHEN Lifeng. Study on current status and couhtermasures of Ningxia fire emergency rescue[J]. Journal of Safety Science & Technology, 2012, 8(8): 176-179. ALEKSANDROV M, RAJABIFARD A, KALANTARI M, et al. Evacuation time in tall high-rise buildings[C]//International Conference on Information and Communication Technologies for Disaster Management. Melbourne: IEEE, 2016: 215-220. 朱庆,胡明远,许伟平,等. 面向火灾动态疏散的三维建筑信息模型[J]. 武汉大学学报(信息科学版),2014,39(7): 762-766.ZHU Qing, HU Mingyuan, XU Weiping, et al. 3D building indormation for facilitating dynamic analysis of indoor fire emergency[J]. Geomatics and Information Science of Wuhan University, 2014, 39(7): 762-766. 张磊,朱国庆,郭大刚. 基于VR的公共建筑火灾逃生训练系统研究[J]. 消防科学与技术,2015(4): 526-529. doi: 10.3969/j.issn.1009-0029.2015.04.032ZHANG Lei, ZHU Guoqing, GUO Dagang. Study on fire escape training system base on VR[J]. Fire Science and Technology, 2015(4): 526-529. doi: 10.3969/j.issn.1009-0029.2015.04.032 郑付联. 虚拟实验教学的设计与实现[D]. 上海: 华东师范大学, 2008. 姜雨青, 林冰仙. 基于智能体的建筑室内空间人群疏散模拟方法研究[C]//中国地理信息科学2014学术年会. 江苏: 测绘出版社, 2014: 287-289. CHU L, WU SJ. A real-time fire evacuation system with cloud computing[J]. Journal of Convergence Information Technology, 2012, 7(7): 208-215. doi: 10.4156/jcit.vol7.issue7.26 崔琳杰. 室内火灾智能逃生导航技术研究[D]. 上海: 华东理工大学, 2014. LI Wenhang, LI Yi, YU Ping, et al. Modeling,simulation and analysis of the evacuation process on stairs in a multi-floor classroom building of a primary school[J]. Physica A:Statistical Mechanics and its Applications, 2016, 469(3): 157-172. TANG Fangqin, REN Aizhu. GIS-based 3D evacuation simulation for indoor fire[J]. Building & Environment, 2012, 49(1): 193-202. SHI Jianyong, REN Aizhu, CHEN Chi. Agent-based evacuation model of large public buildings under fire conditions[J]. Automation in Construction, 2009, 18(3): 338-347. doi: 10.1016/j.autcon.2008.09.009 ZHAO Haifeng, WINTER S. A time-aware routing map for indoor evacuation[J]. Sensors, 2016, 16(1): 112-112. doi: 10.3390/s16010112 丁雨淋,何小波,朱庆,等. 实时威胁态势感知的室内火灾疏散路径动态优化方法[J]. 测绘学报,2016,45(12): 1464-1475. doi: 10.11947/j.AGCS.2016.20160053DING Yulin, HE Xiaobo, ZHU Qing, et al. A dynamic optimization method of indoor fire evacuation route based on realtime situation awareness[J]. Acta Geodaetica et Cartographica Sinica, 2016, 45(12): 1464-1475. doi: 10.11947/j.AGCS.2016.20160053 干建松,陆其邦. 基于Unity2017 NavMesh的智能寻路设计与实现[J]. 淮阴工学院学报,2018,27(5): 11-14. doi: 10.3969/j.issn.1009-7961.2018.05.003GAN Jiansong, LU Qibang. Design and implementation of intelligent routing based on unity2017 NavMesh[J]. Journal of Huaiyin Institute of Technology, 2018, 27(5): 11-14. doi: 10.3969/j.issn.1009-7961.2018.05.003 陈诗. 基于全球导航网格的室内导航路径搜索算法研究[D]. 北京: 北京理工大学, 2016. STENTZ A. Optimal and efficient path planning for partially-known environments[C]//Proceedings of the IEEE International Conference on Robotics and Automation, San Diego: IEEE, 1994: 3310-3317. 孟赟,刘邦权. 三维场景中角色自动寻径算法研究[J]. 武汉理工大学学报,2011,33(12): 125-130. doi: 10.3963/j.issn.1671-4431.2011.12.028MENG Yun, LIU Bangquan. Research on path-finding algorithm of player in 3D scene[J]. Journal of Wuhan University of Technology, 2011, 33(12): 125-130. doi: 10.3963/j.issn.1671-4431.2011.12.028 ZHANG Yanyan, SHEN Yanchun, MA Lini. Pathfinding algorithm of 3D scene based on navigation mesh[J]. Advanced Materials Research, 2014, 1030-1032(9): 1745-1750. 胡东涛,黄浪,周焕明,等. 基于虚拟现实技术的非煤矿山救护队培训系统设计与实现[J]. 中国安全生产科学技术,2017,13(2): 171-175.HU Dongtao, HUANG Lang, ZHOU Huanming, et al. Design and implementation of training system for non-coal mine rescue team based on virtual reality technology[J]. Journal of Safety Science and Technology, 2017, 13(2): 171-175. 程振兴.分布式应急救援系统寻路算法研究及仿真实现[D]. 北京: 北京化工大学, 2016. XU Xiang, HUANG Min, ZOU Kun. Automatic generated navigation mesh algorithm on 3D game scene[J]. Procedia Engineering, 2011, 15(8): 3215-3219. 李俊军. 基于Unity3D的室内建筑三维建模与交互系统实现[D]. 徐州: 中国矿业大学, 2014. 谭波. 基于物理场模型的矿井火灾动态仿真技术研究[D]. 北京: 中国矿业大学, 2010. FLOYD J E. CFD fire simulation using mixture fraction combustion and finite volume radiative heat transfer[J]. Journal of Fire Protection Engineering, 2003, 13(1): 11-36. doi: 10.1177/1042391503013001002 李引擎. 建筑防火工程[M]. 北京: 化学工业出版社, 2004: 4 王烨萍. 基于综合导航网格的智慧旅游动态寻径方法[D]. 成都: 西南交通大学, 2017. 林巍凌. 引入导航网格的室内路径规划算法[J]. 测绘科学,2016,41(2): 39-43.LIN Weiling. Indoor path planning algorithm based on navigation mesh[J]. Science of Surveying and Mapping, 2016, 41(2): 39-43. 曹雷,饶真珍,贺毅辉. 基于导航网格的三维空间表示[J]. 系统仿真学报,2008,20(9): 232-234.CAO Lei, RAO Zhenzhen, HE Yihui. 3D space representation using navigation meshes[J]. Journal of System Simulation, 2008, 20(9): 232-234. 王天顺,张莉. 一种基于导航网格的路径搜索技术[J]. 电脑知识与技术,2010,6(12): 3014-3016.WANG Tianshun, ZHANG Li. An implement of path-finding technology based on NavMesh[J]. Computer Knowledge and Technology, 2010, 6(12): 3014-3016. 高洪晔,张建辉. 面向火灾救援的室内定位与逃生路径规划系统[J]. 杭州电子科技大学学报,2013,33(6): 66-69. doi: 10.3969/j.issn.1001-9146.2013.06-017GAO Hongye, ZHANG Jianhui. Fire escape navigation system based on wireless sensor network and smartphone[J]. Journal of Hangzhou Dianzi University, 2013, 33(6): 66-69. doi: 10.3969/j.issn.1001-9146.2013.06-017 -

 下载:
下载:




 点击查看大图
点击查看大图
图(12) / 表(2)
计量
- 文章访问数: 964
- HTML全文浏览量: 814
- PDF下载量: 66
- 被引次数: 0