

Comparative Analysis of Influence of Foundation on Reinforced Soil Retaining Walls
-
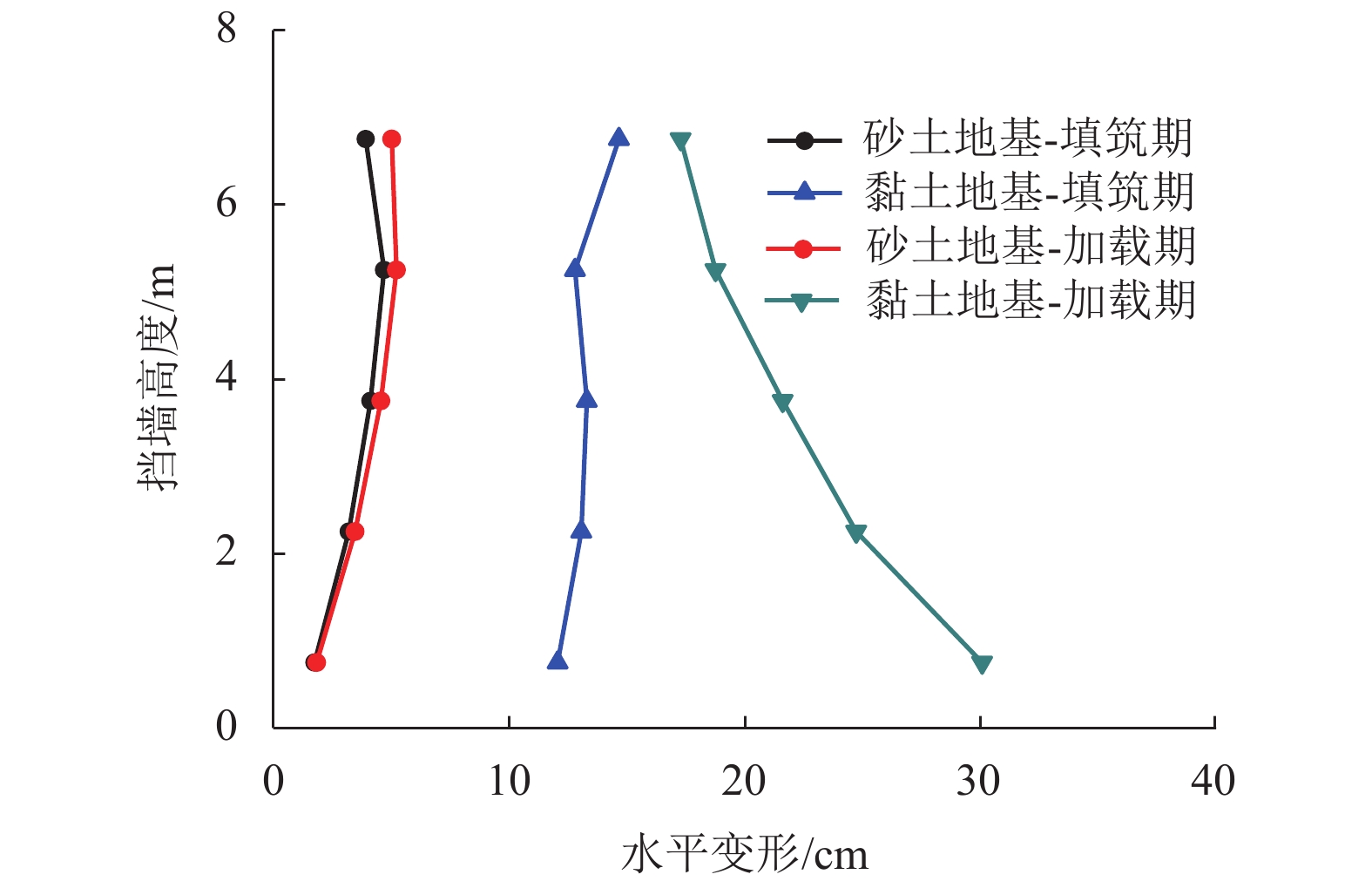
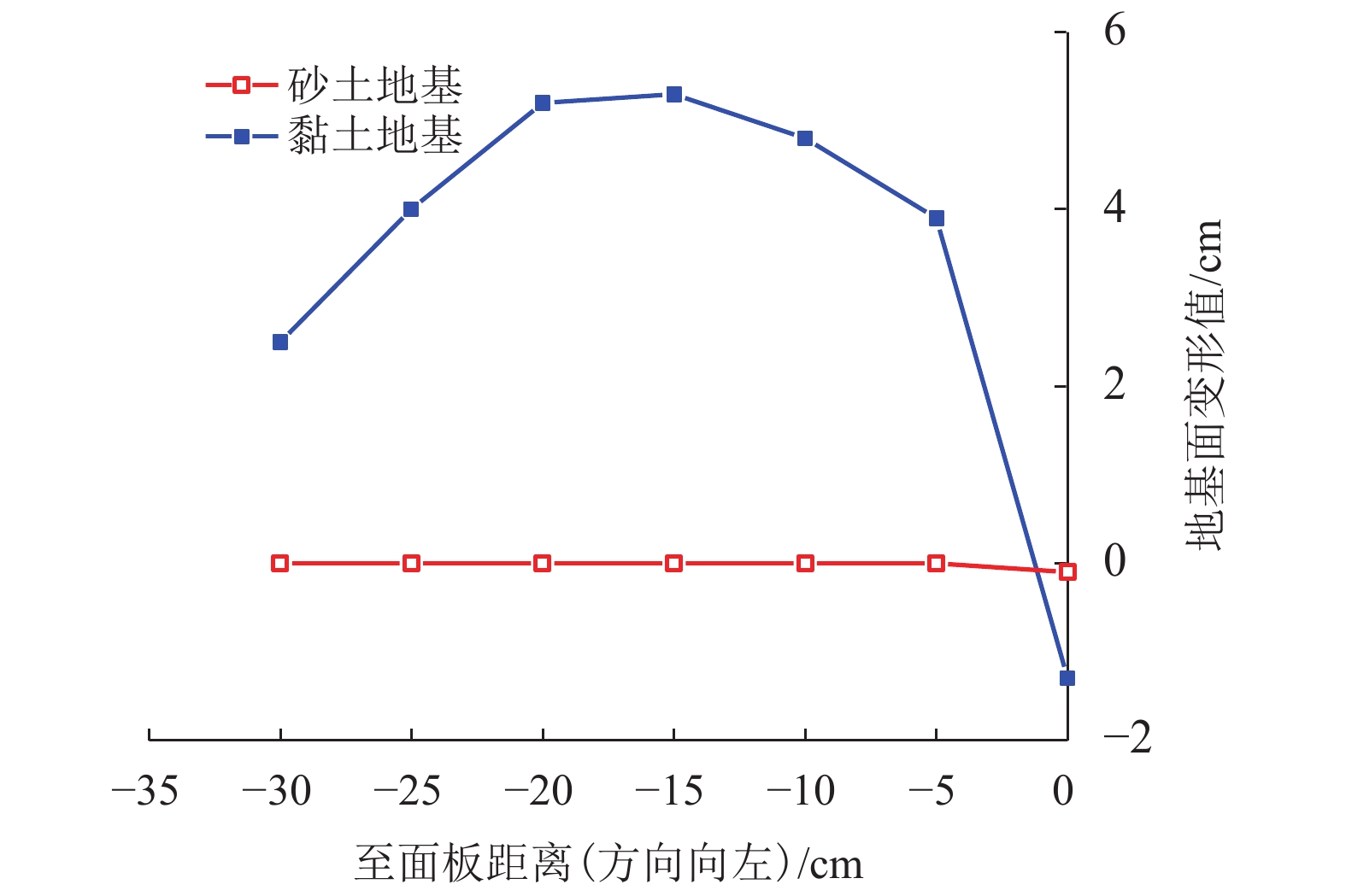
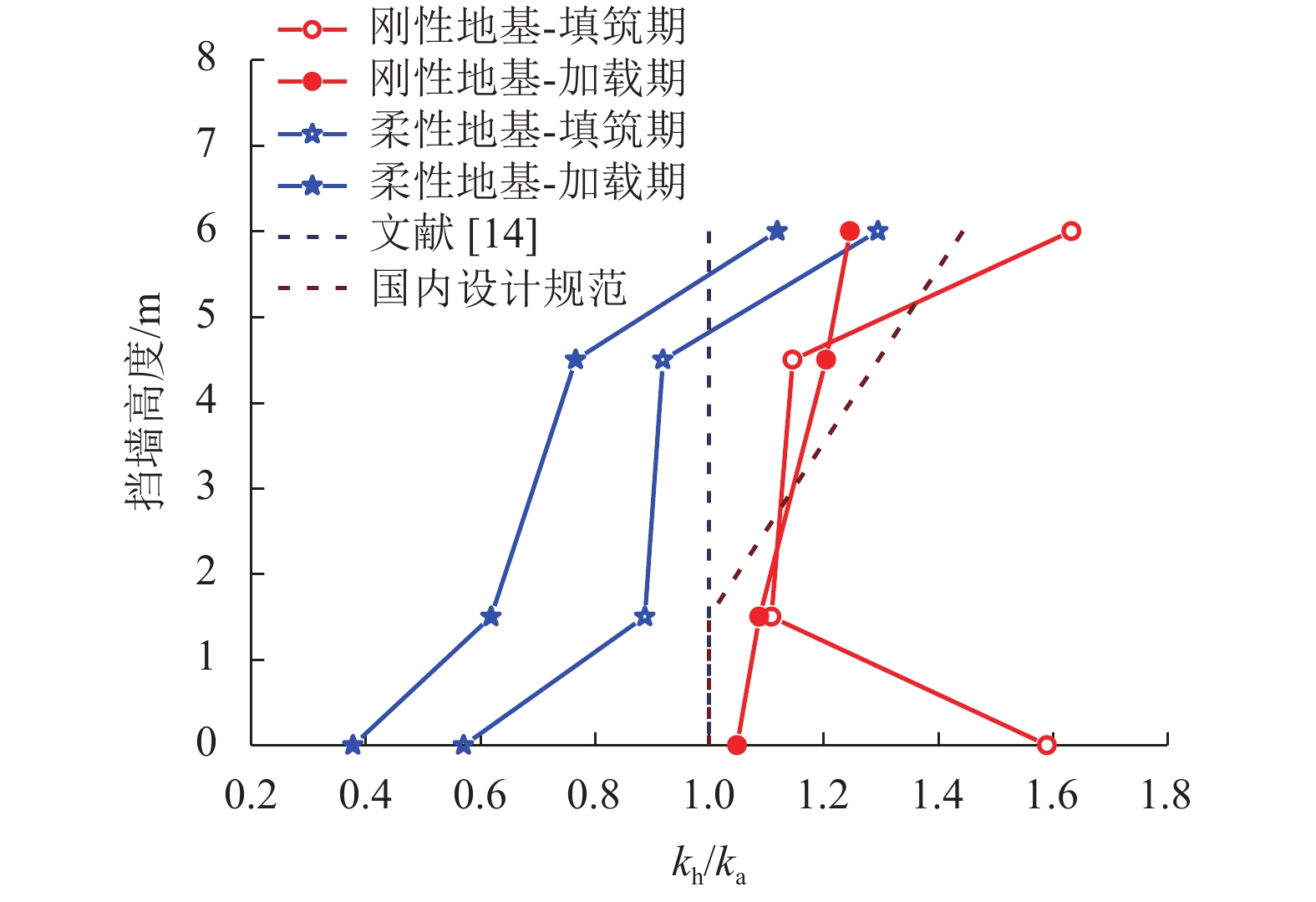
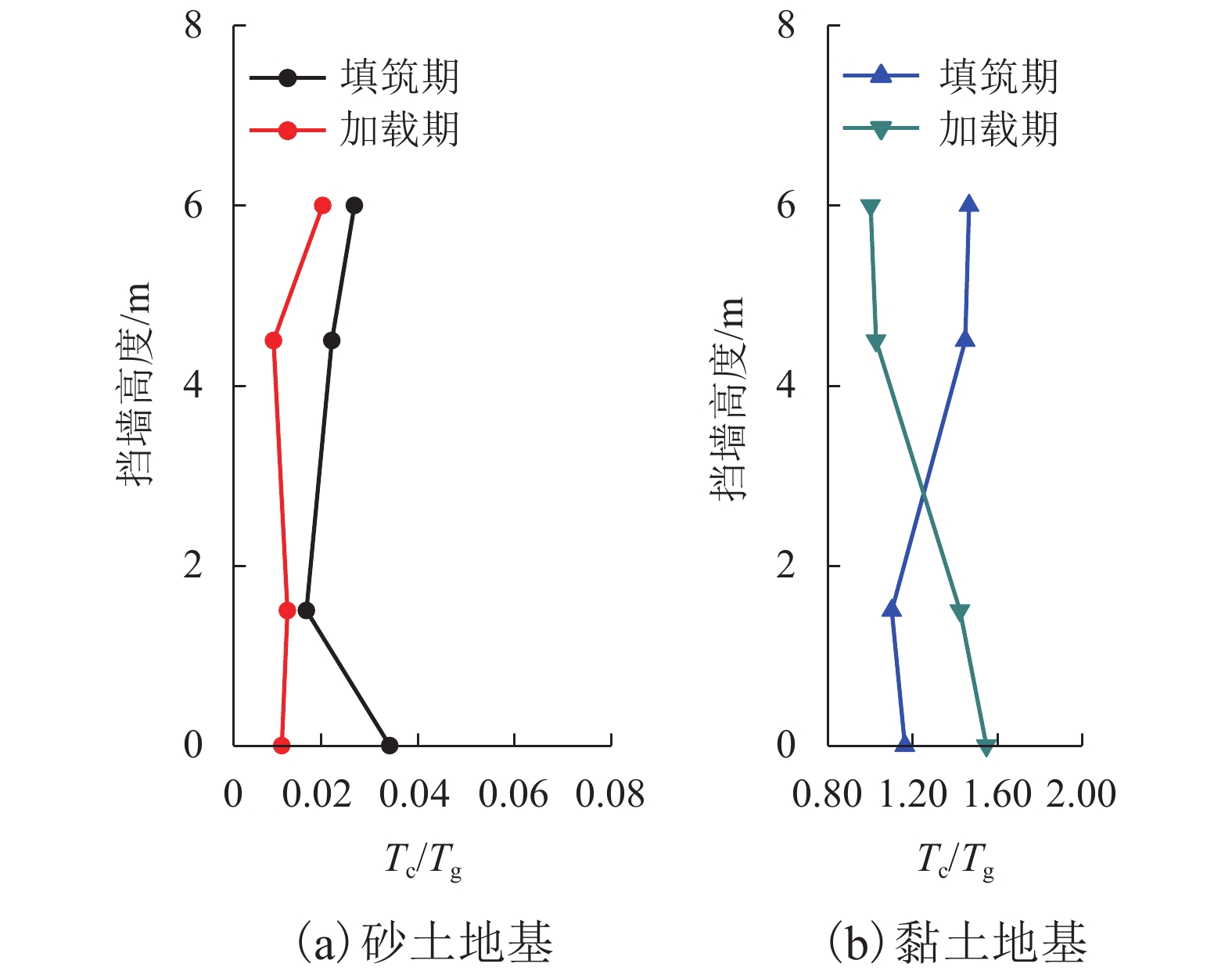
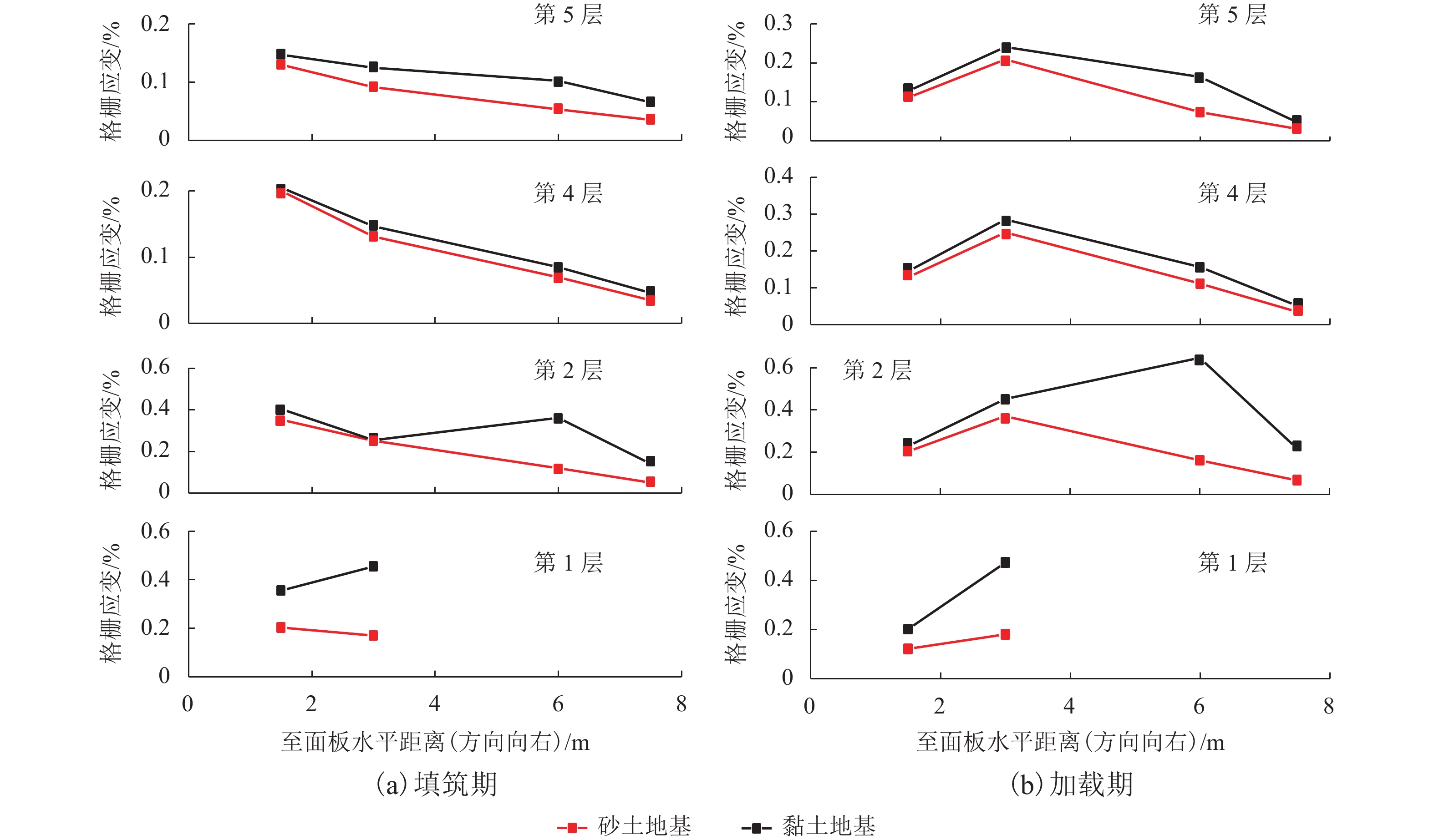
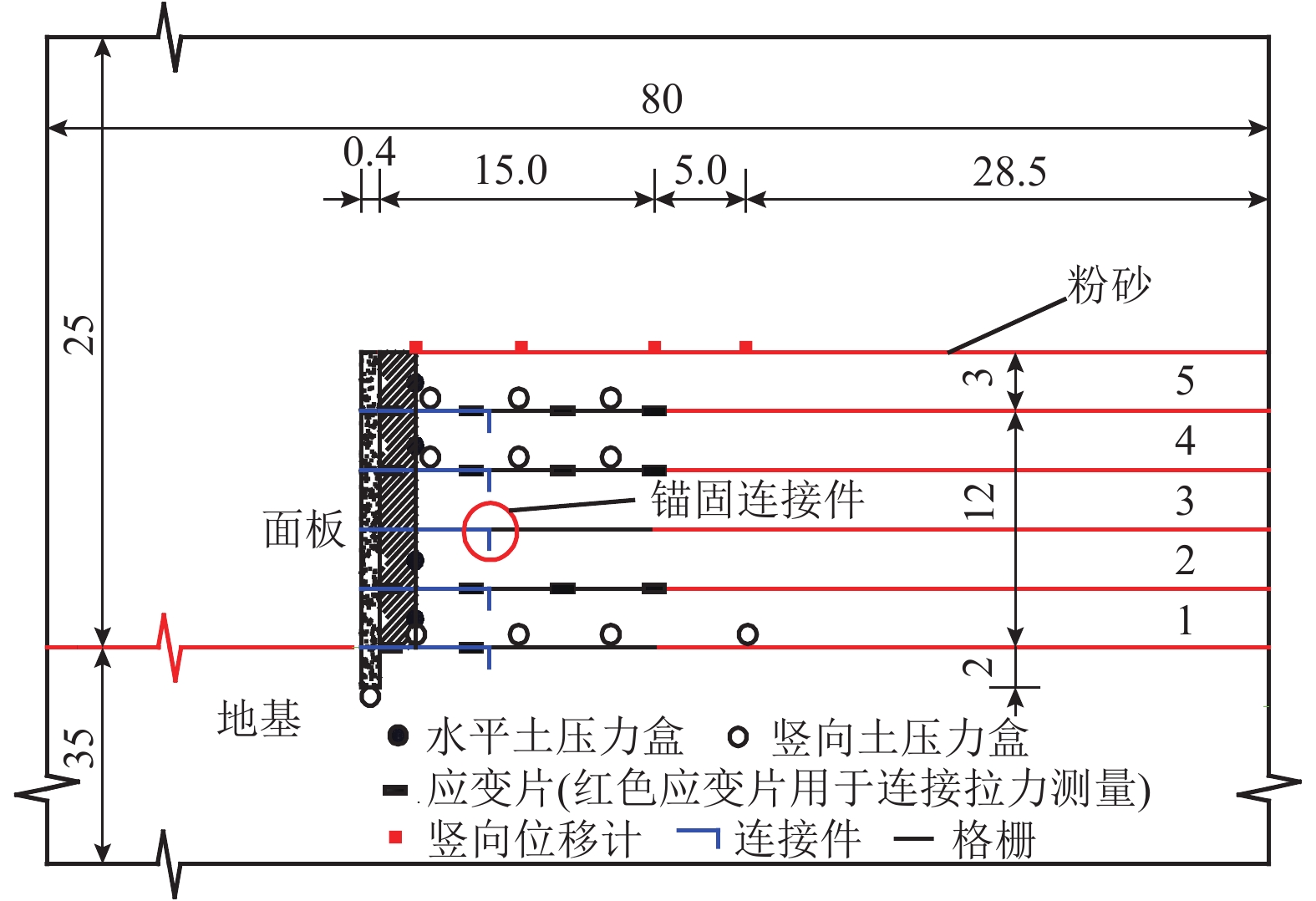
摘要: 为了分析地基对加筋土挡墙的影响,开展了两组离心模型试验. 首先根据相似理论确定试验相似比尺,其次根据相似比尺选取试验材料并制作模型进而开展砂土与黏土地基工况时的模型试验,最后采集并分析了填筑期与施工期的墙体位移、水平土压力、基底竖向应力与筋材应变. 结果表明:砂土地基时墙体的位移最大值位于结构的上部;黏土地基填筑阶段时墙体的位移约为砂土地基时的3倍并且加载阶段时墙底的位移可达30 cm;水平土压力系数沿着高度方向非线性分布,同时加载期的数值小于填筑期时的值;黏土地基时的墙背水平土压力系数小于砂土地基时的数值;与砂土地基时相比,黏土地基的变形可以减小面板底部竖向应力集中的趋势,使其竖向应力与自重应力比值接近1.0;与砂土地基时筋材拉力相比,由于黏土地基时墙体位移较大,因此此时底部筋材应力可增大3倍,同时筋材应变最大值出现的位置相对更远离墙面.Abstract: Two centrifuge model tests were carried out to study the influence of foundation on reinforced soil retaining wall. Firstly, the similarity scale was obtained using the similarity theory. Then, materials used in model tests were determined according to the scaling law and models with sand and clay foundations were designed. Finally, values of displacement, horizontal earth pressure on the wall, vertical earth pressure, and reinforcement strain during the construction stage and the loading stage were collected and analyzed. Results show that the maximum horizontal displacement was located at the top of the structure for the wall constructed on compacted sand foundation; the horizontal displacement of the model wall constructed on clay foundation at the end of the construction was about 3 times that constructed on sand foundation and its bottom displacement could increase to 30 cm in the loading stage; the horizontal earth pressure coefficient was nonlinear along the wall height and was smaller in the clay foundation case. Besides, the value in the loading stage was smaller than that in the construction stage in both cases. Compared with the wall constructed on sand soil foundation, the deformation of the clay could reduce the concentration of the vertical stress at the bottom of the wall facing, resulting in the ratio of the vertical stress to the self-weight stress being close to 1.0. As the displacement of the wall constructed on clay foundation increased, the strain was about 3 times that with compacted sand foundation, and the position of the maximum reinforcement strain was far away from the wall facing.
-
Key words:
- reinforced soil retaining wall /
- foundation /
- displacement /
- earth pressure /
- reinforcement strain
-
表 1 物理量相似关系
Table 1. Similarity relationship
物理量 量纲 相似比 物理量 量纲 相似比 长度 L 1/n 位移 L 1/n 密度 ML−3 1 应力 ML−1T−2 1 应变 1 摩擦角 1 黏聚力 ML−1T−2 1 力 MLT−2 1/n2 抗拉强度 MT−2 1/n 抗弯刚度 ML3 T−2 1/n4  下载: 导出CSV
下载: 导出CSV
-
TATSUOKA F, TATEYAMA M, KOSEKI J, et al. Geosynthetic-reinforced soil structures for railways in Japan[J]. Transportation Infrastructure Geotechnology, 2014, 1(1): 3-53. doi: 10.1007/s40515-013-0001-0 TATSUOKA F, TATEYAMA M, MOHRI Y, et al. Remedial treatment of soil structures using geosynthetic-reinforcing technology[J]. Geotextiles and Geomembranes, 2007, 25(4/5): 204-220. RUNSER D J, FOX P J, BOURDEAU P L. Field performance of a 17 m-high reinforced soil retaining wall[J]. Geosynthetics International, 2001, 8(5): 367-391. doi: 10.1680/gein.8.0200 汪承志, 栾茂田. 格栅加筋挡墙长期工作特性的现场试验研究[J]. 岩石力学与工程学报, 2010, 29(增刊2): 3960-3966.WANG Chengzhi, LUAN Maotian. Study of long-term performance of reinforced earth retaining walls by field test[J]. Chinese Journal of Rock Mechanics and Engineering, 2010, 29(S2): 3960-3966. 徐鹏,蒋关鲁,王宁,等. 填土相对密实度对加筋土挡墙的影响研究[J]. 岩土力学,2018,39(11): 4010-4016.XU Peng, JIANG Guanlu, WANG Ning, et al. Centrifugal model test on influence of relative compactness on reinforced soil retaining walls[J]. Rock and Soil Mechanics, 2018, 39(11): 4010-4016. 汪益敏,BATHURST R J. 振动条件下 EPS 缓冲层对挡土墙受力与变形影响的水平条分法模型研究[J]. 土木工程学报,2008,41(10): 73-80. doi: 10.3321/j.issn:1000-131X.2008.10.011WANG Yimin, BATHURST R J. Horizontal slice method for force and displacement analysis of EPS geofoam seismic buffers for rigid retaining walls[J]. China Civil Engineering Journal, 2008, 41(10): 73-80. doi: 10.3321/j.issn:1000-131X.2008.10.011 ROWE R K, HO S K. Horizontal deformation in reinforced soil walls[J]. Canadian Geotechnical Journal, 1998, 35(2): 312-327. doi: 10.1139/t97-062 SKINNER G D, ROWE R K. Design and behaviour of a geosynthetic reinforced retaining wall and bridge abutment on a yielding foundation[J]. Geotextiles and Geomembranes, 2005, 23(3): 234-260. doi: 10.1016/j.geotexmem.2004.10.001 陈周与,马时冬. 超软地基上土工布加筋土挡墙的试验研究[J]. 长江科学院院报,2001,18(6): 29-32. doi: 10.3969/j.issn.1001-5485.2001.06.008CHEN Zhouyu, MA Shidong. Test of a reinforced soil wall with geotechnical fabric on soft ground[J]. Journal of Yangtze River Scientific Research Institute, 2001, 18(6): 29-32. doi: 10.3969/j.issn.1001-5485.2001.06.008 HUANG C C, LUO W M. Behavior of cantilever and geosynthetic-reinforced walls on deformable foundations[J]. Geotextiles and Geomembranes, 2010, 28(5): 448-459. doi: 10.1016/j.geotexmem.2009.12.008 陈建峰,柳军修,石振明. 软土地基加筋土挡墙数值模拟及稳定性探讨[J]. 岩石力学与工程学报,2012,31(9): 1928-1935.CHEN Jianfeng, LIU Junxiu, SHI Zhenming. Numerical simulation and stability discussion of a reinforced soil wall on soft soil foundation[J]. Chinese Journal of Rock Mechanics and Engineering, 2012, 31(9): 1928-1935. 唐辉明,林彤. 三峡工程库区巫山县加筋土挡墙离心模型试验研究[J]. 岩石力学与工程学报,2004,23(17): 2893-2901. doi: 10.3321/j.issn:1000-6915.2004.17.008TANG Huiming, LIN Tong. Centrifuge modeling test on reinforced earth wall at Wushan county in reservoir area of the Three Gorges project[J]. Chinese Journal of Rock Mechanics and Engineering, 2004, 23(17): 2893-2901. doi: 10.3321/j.issn:1000-6915.2004.17.008 NAKAJIMA, S, HONG, K, MULMI, S, et al. Study on seismic performance of geogrid reinforced soil retaining walls and deformation characteristics of backfill soil[C]//Proceedings of 4th Asian Regional Conference on Geosynthetics. Shanghai: Springer, 2008: 211-216. Federal Highway Administration and U S, Department of Transportation. Design and construction of mechanically stabilized earth walls and reinforced soil slopes-volumel: FHWA-NHI-10-024[S]. Washington D. C.: [s.n.], 2009. -

 下载:
下载:


 点击查看大图
点击查看大图
图(7) / 表(1)
计量
- 文章访问数: 739
- HTML全文浏览量: 415
- PDF下载量: 21
- 被引次数: 0