

Autonomous Operation Mode of Aircrafts in Tube Air Corridor
-
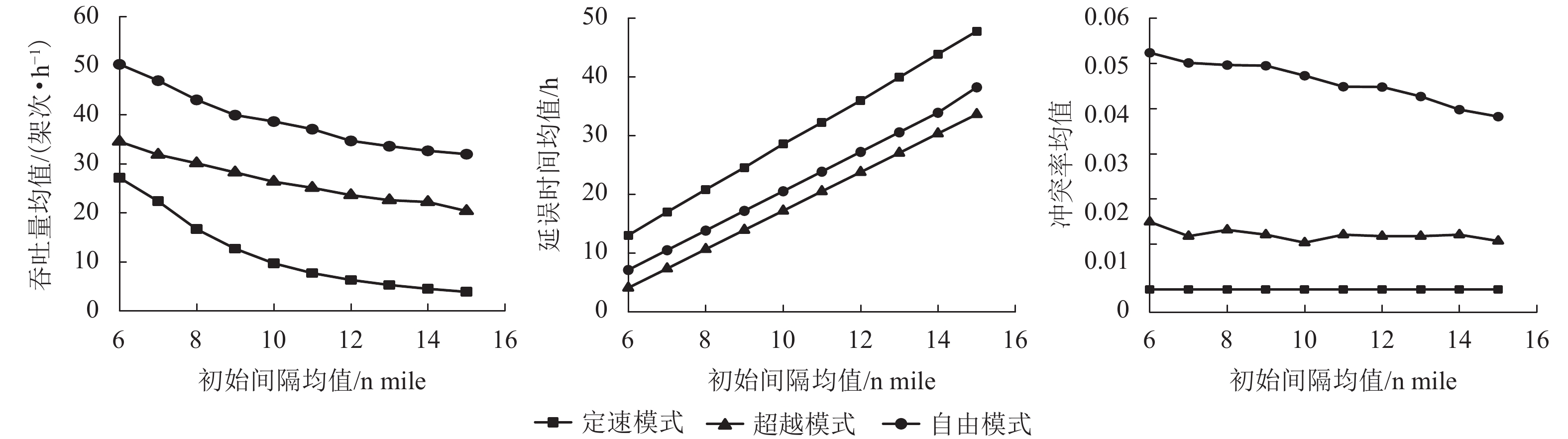
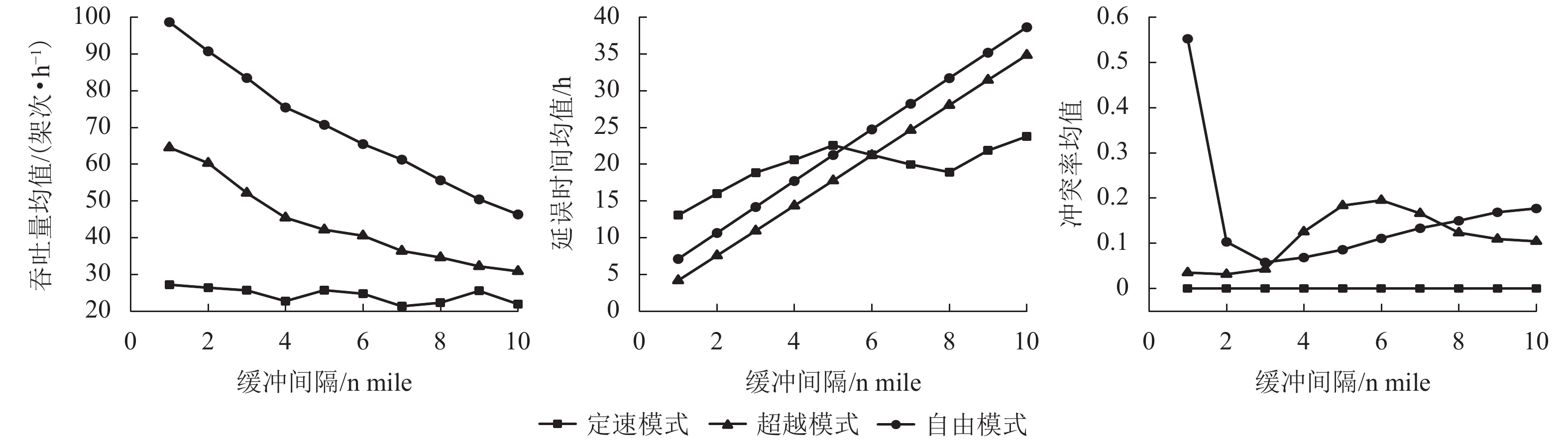
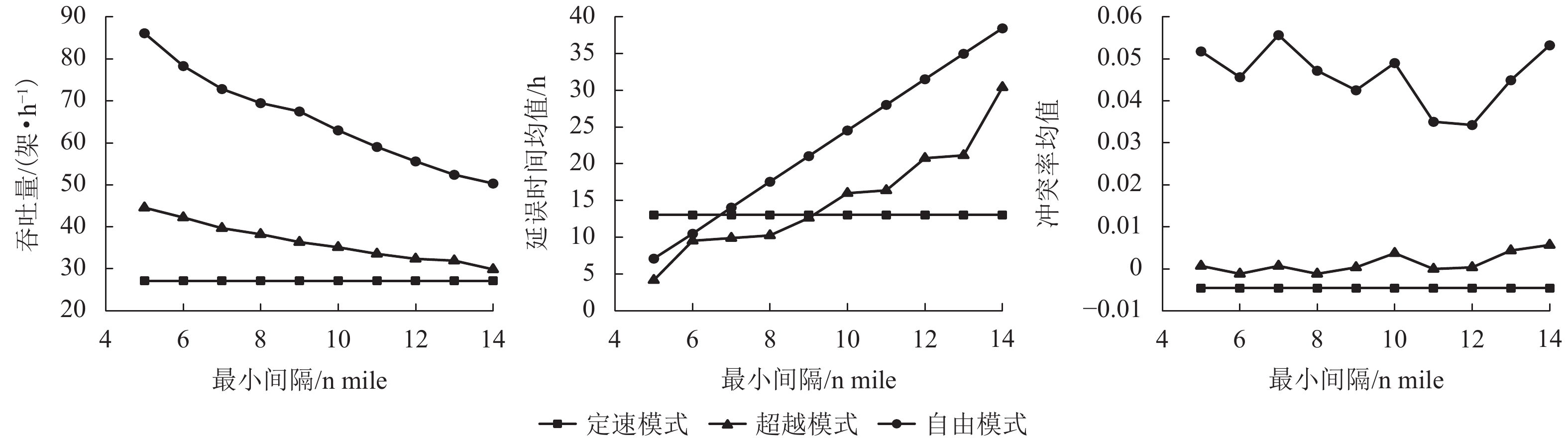
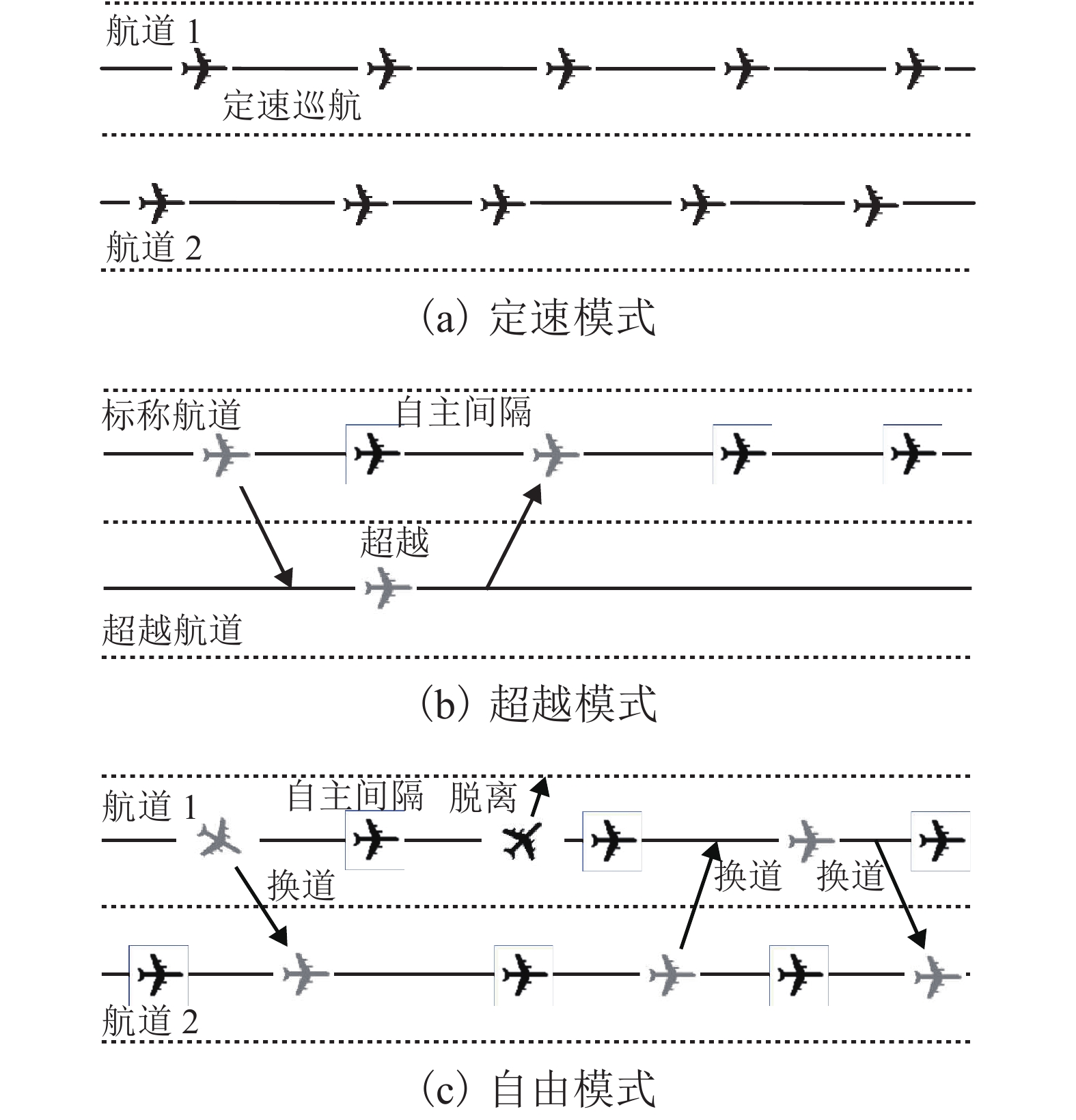
摘要: 为了提升管型航路内航空器运行效率,降低飞行延误和冲突,首先选取了定速、超越和自由3种典型自主运行模式,并分析了其特点;其后,建立了管型航路中航空器自主运行仿真模型,并采用蒙特卡洛仿真与机器学习相结合的方法,分析了自主运行模式中关键变量的相关性;最后,以北京首都机场—广州白云机场高空航路为实例,建立了各衡量指标回归模型,并对3种模式典型指标进行了敏感性分析. 研究结果表明:自由模式中的吞吐量和总延误时间指标相对较好,但冲突率相对较高,冲突率最小值为0.036 1;超越模式中各项指标相对折衷,其航路资源的利用率不如自由模式,吞吐量约为自由模式的61.89%;定速模式中的航空器缺乏调整速度和间隔的调整能力,受航空器的初始间隔影响较为明显.Abstract: To improve the operational efficiency of aircrafts in tube air corridor, reduce flight delays and conflicts, three representative aircraft operation modes were analyzed including, the speed-based mode, speed-independent mode and self-separation mode. Then, an autonomous operation model was built by simulation, and the correlation between important variables in the model were analyzed in a way of combining the Monte Carlo simulation and machine learning. Finally, the upper air route between Beijing Capital Airport and Guangzhou Baiyun Airport was selected as a study case. The regression models for all metrics were established and sensitivity analysis was conducted for the typical metrics of three modes. The results show that in the self-separation mode throughput and delay time are desirable while the conflict rate is relatively high with a minimum of 0.0361. The speed-independent mode leads to moderate results, which implies a low utilization of route resource with about 61.89% throughput of the self-separation mode. The speed-based mode lacks the functions of speed and separation adjustment, which is obviously affected by the initial separation.
-
表 1 FL350高度层上标准大气数据
Table 1. Standard atmospheric data on FL350
高度/m 温度/℃ 气压/Pa 密度/(kg•m−3) 音速/kn 10 668 −54.3 23 800 0.379 6 576  下载: 导出CSV
下载: 导出CSV
表 2 航空器运行状态定义
Table 2. Definition for aircraft operating states
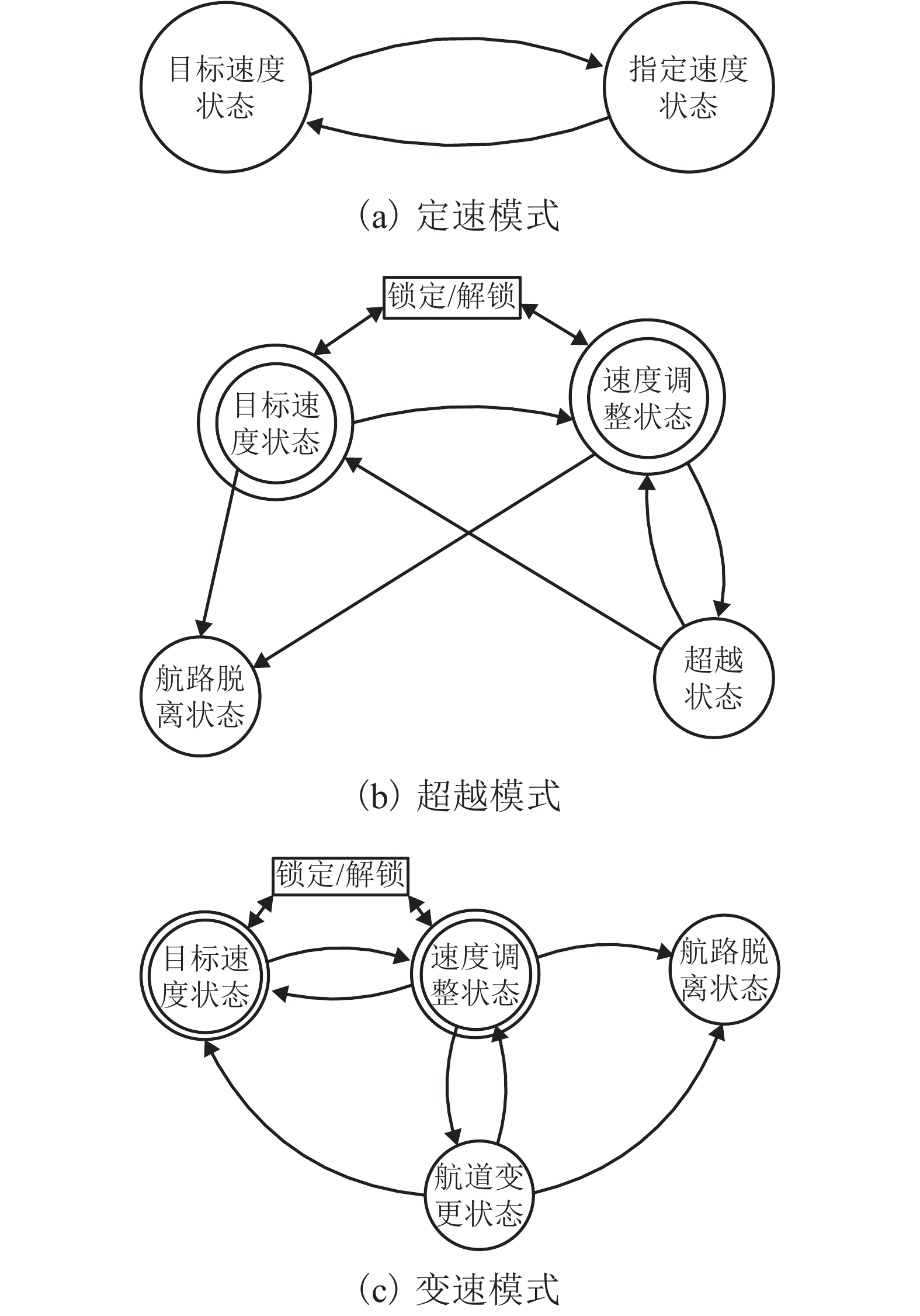
运行状态 定义描述 目标速度 航空器按最佳巡航速度飞行状态,也被设定为航空器初始状态,存在于各模式 指定速度 航道中航空器按指定速度飞行的状态,存在于定速模式 速度调整 航空器通过调整速度,自主保持与前方航空器间隔,存在于超越模式和自由模式 超越 航空器借助超越航道超越前方航空器的状态,存在于超越模式和自由模式 航路脱离 航空器为保障运行安全而脱离管型航路的状态,存在于超越模式和自由模式 锁定 为避免航空器同时换道或脱离的安全保护状态,属于一种复合状态,存在于超越模式和自由模式 航道变更 航空器为保障运行安全或实现超越进行航道变更的状态,存在于自由模式
下载: 导出CSV
表 3 自主运行模式仿真模型主要变量
Table 3. Variable definitions for simulation model in autonomous operation mode
变量 定义描述 初始间
隔/n mile航空器进入管型航路时与前方航空器保持的初始间隔,其值为随机变量 最小间
隔/n mile航空器在自主运行时与前方航空器所应保持的最小安全纵向间隔 缓冲间
隔/n mile考虑运行随机性和安全性,在最小间隔上额外增加的缓冲距离 目标间
隔/n mile航空器在自主运行时与前方航空器保持的目标间隔 速度差阈
值/kn当航空器选择航道变更或超越前方航空器时的参考速度差值 变更间
隔/n mile当航空器选择航道变更或超越前方航空器时的参考距离差值 距离阈
值/n mile当航空器选择按目标速度飞行或调整速度时,与前方航空器参考距离阈值
下载: 导出CSV
表 4 定速模式相关性分析
Table 4. Correlation analysis for speed-based mode
变量类型 吞吐量 r 延误 r 初始间隔 −0.654 0.998 缓冲间隔 −0.236 0.150
下载: 导出CSV
表 5 超越模式相关性分析
Table 5. Correlation analysis for speed-independent mode
变量类型 吞吐量 r 延误 r 冲突率 r 初始间隔 −0.684 0.670 −0.303 缓冲间隔 −0.537 0.362 0.282 最小间隔 −0.578 0.589 −0.046 距离阈值 0.025 −0.331 −0.024 换道距离 0.088 0.087 0.539 速度阈值 −0.076 −0.014 −0.061
下载: 导出CSV
表 6 自由模式相关性分析
Table 6. Correlation analysis for self-separation mode
变量类型 吞吐量 r 延误 r 冲突率 r 初始间隔 −0.626 0.520 −0.781 缓冲间隔 −0.506 0.777 −0.195 最小间隔 −0.697 0.567 −0.083 距离阈值 0.011 −0.130 −0.507 换道距离 0.001 0.002 0.007 速度阈值 −0.013 0.003 −0.006
下载: 导出CSV
表 7 自主运行模式仿真实验参数值
Table 7. Parameter values in simulation of autonomous operation mode
参数 初始数据 类型 模拟次数/次 10 常量 航空器数量/架次 4 096 常量 时间步长/s 6 常量 初始间隔(均值)/n mile 6~15 随机变量 缓冲间隔/n mile 1~10 变量 最小间隔/n mile 5~14 变量 初始速度/kn 巡航速度 变量 距离阈值/n mile 8 变量 目标间隔/n mile 7 变量 变更距离/n mile 12 变量 目标速度/kn 巡航速度 变量 速度阈值/kn 80 变量 高度/m 11 000 常量
下载: 导出CSV
-
European Organization for the Safety of Air Navigation. The ATM target concept D3: DLM-0612-001-02-00[S]. Brussels: SESAR Executive Committee, 2007. Federal Aviation Administration. Concept of operations for the next generation air transportation system: version 3.0[S]. Washington D. C.: Joint Planning and Development Office, 2010. ALIPIO J, CASTRO P, KAING H, et al. Dynamic airspace super sectors (DASS) as high-density highways in the sky for a new US air traffic management system[C]//Systems and Information Engineering Design Symposium. Charlottesville: IEEE, 2003: 57-66. YOUSEFI A, DONOHUE G L, SHERRY L. High volume tube shape sectors (HTS): a network of high capacity ribbons connecting congested city pairs[C]//The 23rd Digital Avionics Systems Conference. Piscataway: IEEE, 2004: 1-7. YOUSEFI A, LARD J, TIMMERMAN J. NextGen flow corridors initial design, procedures and display functionalities[C]//Digital Avionics Systems Conference (DASC). Florida: IEEE, 2010: 4.D.1.1-4.D.1.19. YOUSEFI A, ZADEH A N. Dynamic allocation and benefit assessment of NextGen flow corridors[J]. Transportation Research Part C:Emerging Technologies, 2013, 33(3): 297-310. HERING H. Air traffic freeway system for Europe: EEC Note No. 20/05[S]. Brussels: EUROCONTROL Experimental Centre, 2005. SRIDHAR B, GRABBE S, SHETH K, et al. Initial study of tube networks for flexible airspace utilization[C]//Guidance, Navigation, and Control Conference and Exhibit. Colorado: AIAA, 2006: 6768.1-6768.9. WING D J, SMITH J C, BALLIN M G. Analysis of a dynamic multi-track airway concept for air traffic management: NASA/TP-2008-215323[S]. Virginia: Langley Research Center, 2008. MUNDRA A D, SIMONS E M. Self-separation corridors[C]//Digital Avionics Systems Conference. Dallas: IEEE, 2007: 3.C.3.1-3.C.3.11. HOFFMAN R, PRETE J. Principles of airspace tube design for dynamic airspace configuration[C]//The 26th Congress of International Council of the Aeronautical Sciences. Alaska: [s.n.], 2008: 8939.1-8939.17. SHETH K S, ISLAM T S, KOPARDEKAR P H. Analysis of airspace tube structures[C]//Digital Avionics Systems Conference. Minnesota: IEEE, 2008: 3.C.2.1-3.C.2.10. XUE M. Design analysis of corridors in the sky[C]//Guidance, Navigation, and Control Conference. Chicago: AIAA, 2009: 5859.1-5859.11. XUE M, KOPARDEKAR P H. High-capacity tube network design using the Hough transform[J]. Journal of Guidance,Control,and Dynamics, 2009, 32(3): 788-795. KOTECHA P, HWANG I. Optimization based tube network design for the next generation air transportation system[C]//Guidance, Navigation, and Control Conference. Chicago: AIAA, 2009: 5860. 王莉莉,刘兵. 空中高速路网枢纽的选择[J]. 国民航大学学报,2012,30(3): 6-9.WANG Lili, LIU Bing. Choices of air highway network hubs[J]. Journal of Civil Aviation University of China, 2012, 30(3): 6-9. YE Bojia, HU Minghua, SHORTLE J. Risk-capacity tradeoff analysis of an en-route corridor model[C]//Proceedings of 5th International Conference on Research in Air Transportation. Berkeley: [s.n.], 2012: 22-25. ZHANG Yimin, SHORTLE J, SHERRY L. Methodology for collision risk assessment of an airspace flow corridor concept[J]. Reliability Engineering & System Safety, 2015, 142: 444-455. NAKAMURA Y, TAKEICHI N. A self-separation algorithm for high-density air corridor allocated to optimal flight trajectories[C]//Modeling and Simulation Technologies Conference. California: [s.n.], 2015: 0426.1-0426.12. TAKEICHI N, ABUMI Y. Benefit optimization and operational requirement of flow corridor in Japanese airspace[J]. Proceedings of the Institution of Mechanical Engineers Part G:Journal of Aerospace Engineering, 2016, 230(9): 1780-1787. doi: 10.1177/0954410015616412 COLON M G, LIZUAIN E M, MORA-CAMINO F, et al. Design of air corridor structures for enhanced traffic performance[C]//Digital Avionics Systems Conference. Sacramento: IEEE, 2016: 7778039.1-7778039.7. GLOVER W, LYGEROS J. A multi-aircraft model for conflict detection and resolution algorithm evaluation[EB/OL]. [2018-07-17]. http://citeseerx.ist.psu.edu/viewdoc/download;jsessionid=1F39BB2CDF6A44E5333DD12159B26D25?doi=10.1.1.143.3482&rep=rep1&type=pdf. European Organization for the Safety of Air Navigation. User manual for the base of aircraft data (BADA): 13/04/16-01—2013[S]. Bruxelles: EUROCONTROL Experimental Centre, 2013. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 643
- HTML全文浏览量: 316
- PDF下载量: 23
- 被引次数: 0