

Track Mechanical Analysis under Strong Cross Wind Based on Fluid-Solid Coupling
-
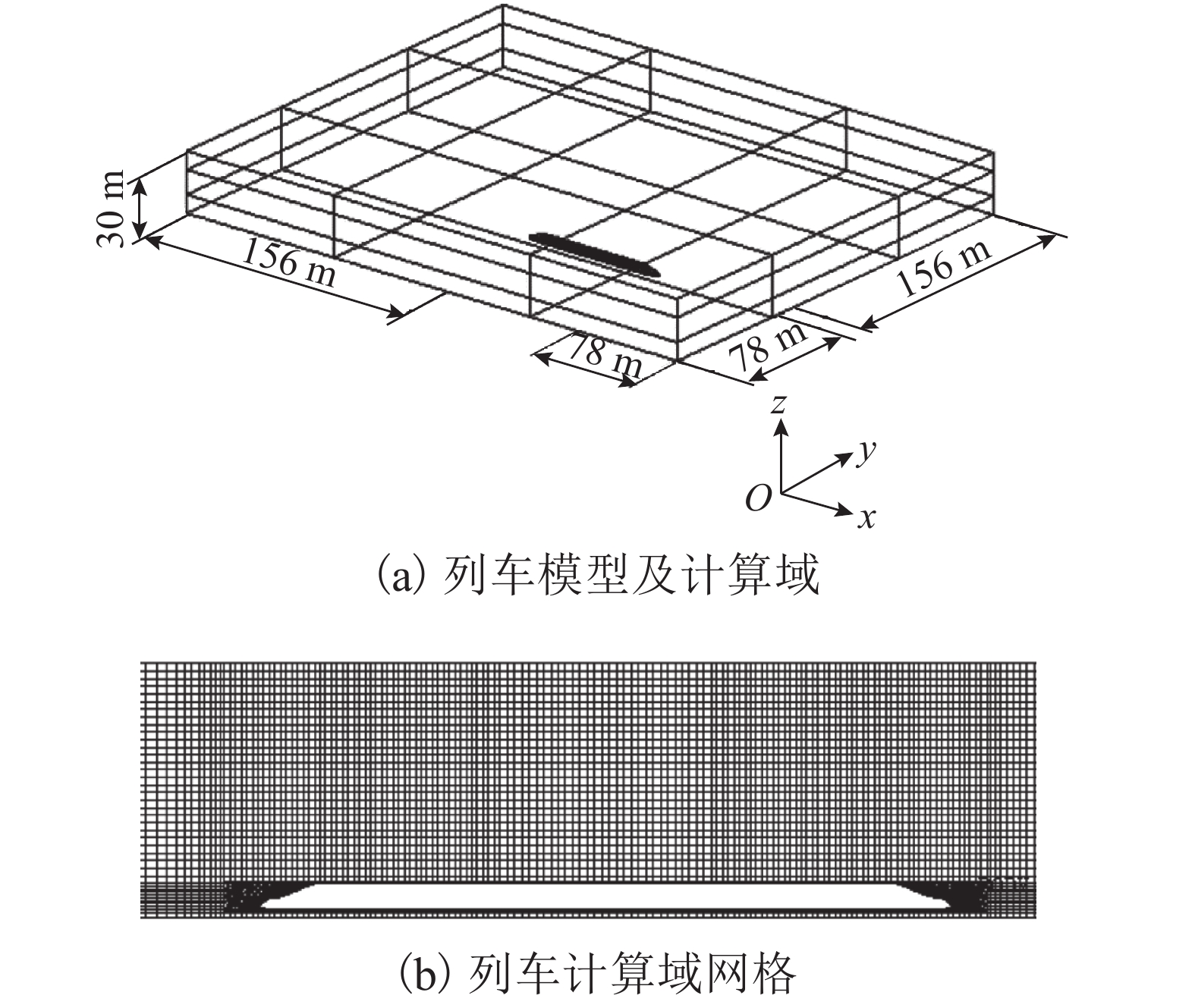
摘要: 为研究强横风条件下轨道结构的力学特性,采用计算流体力学和有限元联合仿真,对轨道结构的受力和变形进行了分析. 首先采用SOLIDWORKS软件基于CRH380A型高速列车实际外形轮廓建模,然后通过FLUENT计算得到列车的气动特性,再与有限元软件ABAQUS联合仿真建立列车-轨道耦合模型;模型中完整地保留列车表面所受的气动力,解决了流固耦合中列车气动力的传递问题;最后基于建立的耦合模型,针对强横风作用下轨道结构的力学特性进行系统分析. 研究结果表明,当列车运行速度为350 km/h,风速从0变化到15 m/s时,钢轨背风侧处横向位移从0.177 mm增加到2.100 mm,增大了11.86倍,可见强横风条件下,要重点关注钢轨背风侧处横向力学特性;当风速超过15 m/s时,列车运行速度达到250 km/h,钢轨横向位移超出了最大允许值2.000 mm,表明长期的强横风作用将会导致轨道的几何形位发生改变,但此时轮重减载率和脱轨系数并未超出对应限值0.65和0.800. 因此,横风作用下不仅要考虑列车运行安全性指标,也要考虑轨道结构力学指标的变化.Abstract: In order to explore the mechanical characteristics of track structure under strong cross wind, the co-simulation of CFD and FEM is used to analyze the force and deformation of track structure. Firstly, SOLIDWORKS is used to establish a model based on the CRH380A high-speed train. Then, the aerodynamic characteristics of the train are calculated by FLUENT and the train-track coupling model is established by finite element software ABAQUS. The aerodynamic force on the surface of the train is completely retained in the model, which has solved the problem of aerodynamic force transfer in the fluid-solid coupling. Finally, based on the established coupling model, the mechanical characteristics of the track structure under strong cross wind are analyzed. The results show that when the train running speed is up to 350 km/h and the wind speed changes from 0 to 15 m/s, the lateral displacement on the leeward side of the rail increases from 0.177 mm to 2.100 mm, which increases by 11.86 times. This indicates that the mechanics of the rail leeward side should be focused. When the wind speed exceeds 15 m/s and the train operation speed is 250 km/h, the rail lateral displacement is beyond the allowable maximum of 2.000 mm, showing that long-term cross wind will lead to track geometry change. However, the rate of wheel load reduction and the coefficient of derailment is not up to the limit of 0.65 and 0.800, respectively. Therefore, it is necessary to consider not only the safety index of train operation, but also the change in the mechanical characteristics of track structure.
-
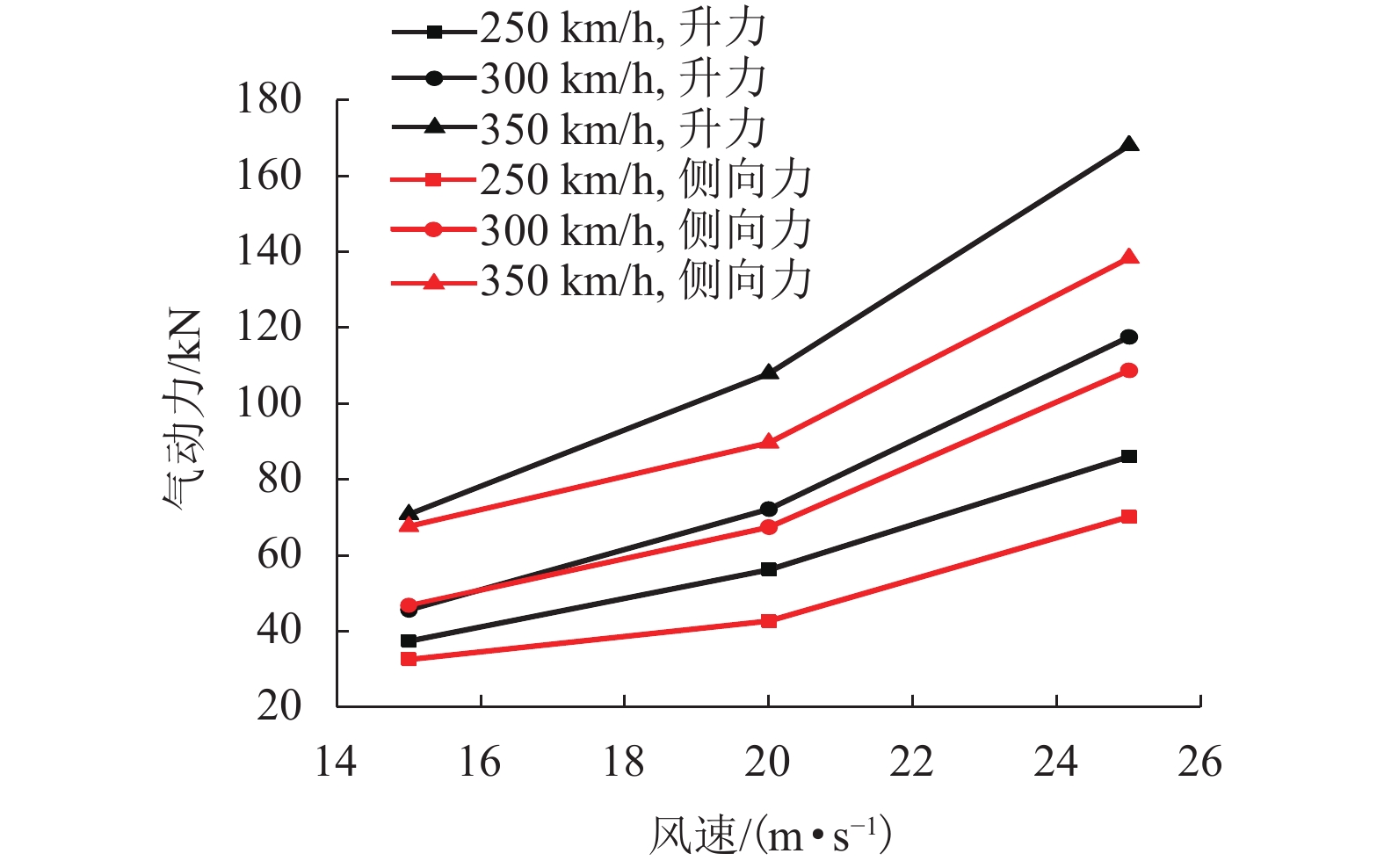
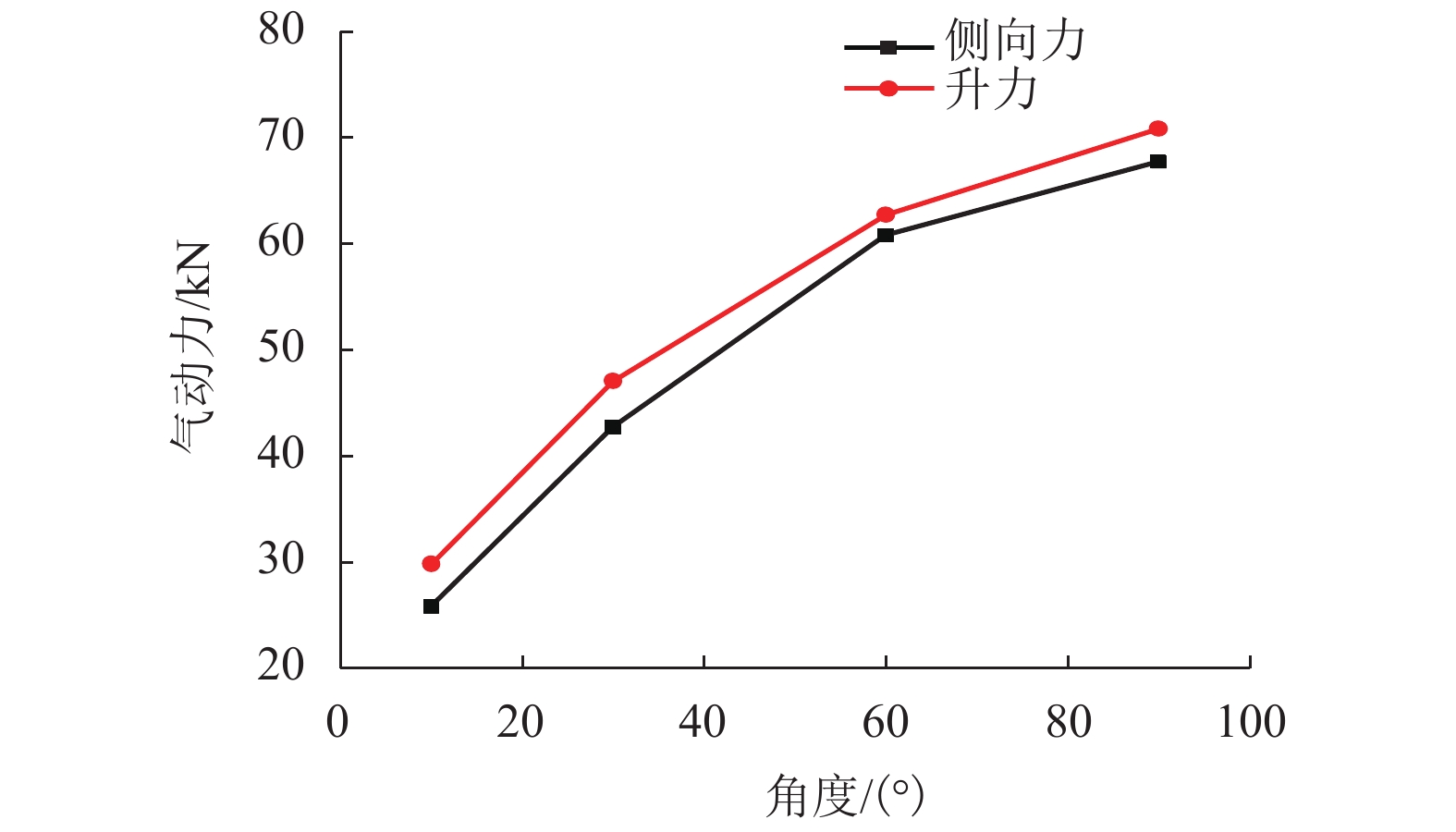
图 6 不同风速和车速下列车气动力
Figure 6. Aerodynamic force under different cross-wind speeds and vehicle speeds
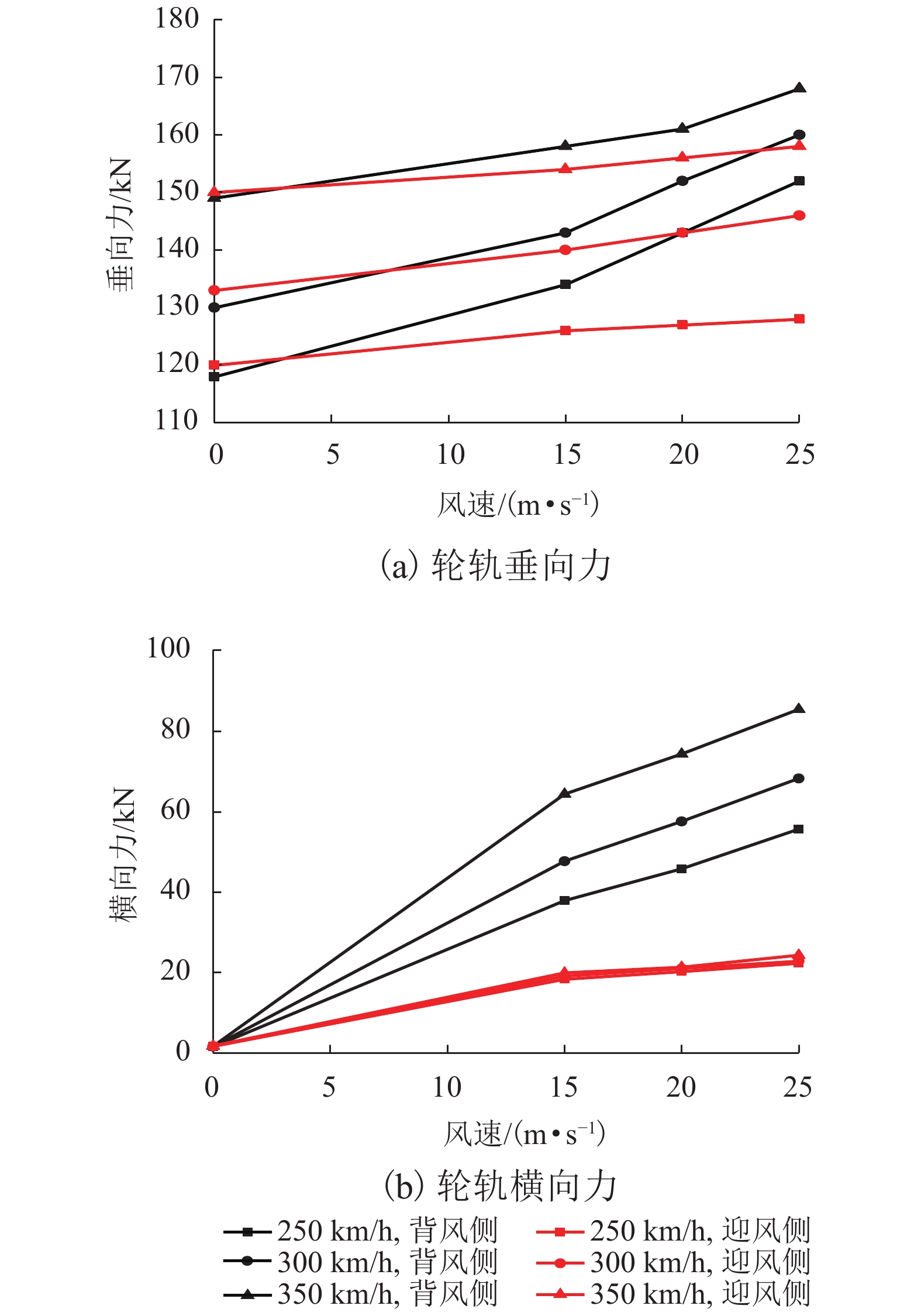
图 8 轮轨垂、横向力随车速和风速的变化
Figure 8. Vertical and lateral wheel track forces of rail varying with vehicle speed and wind speed
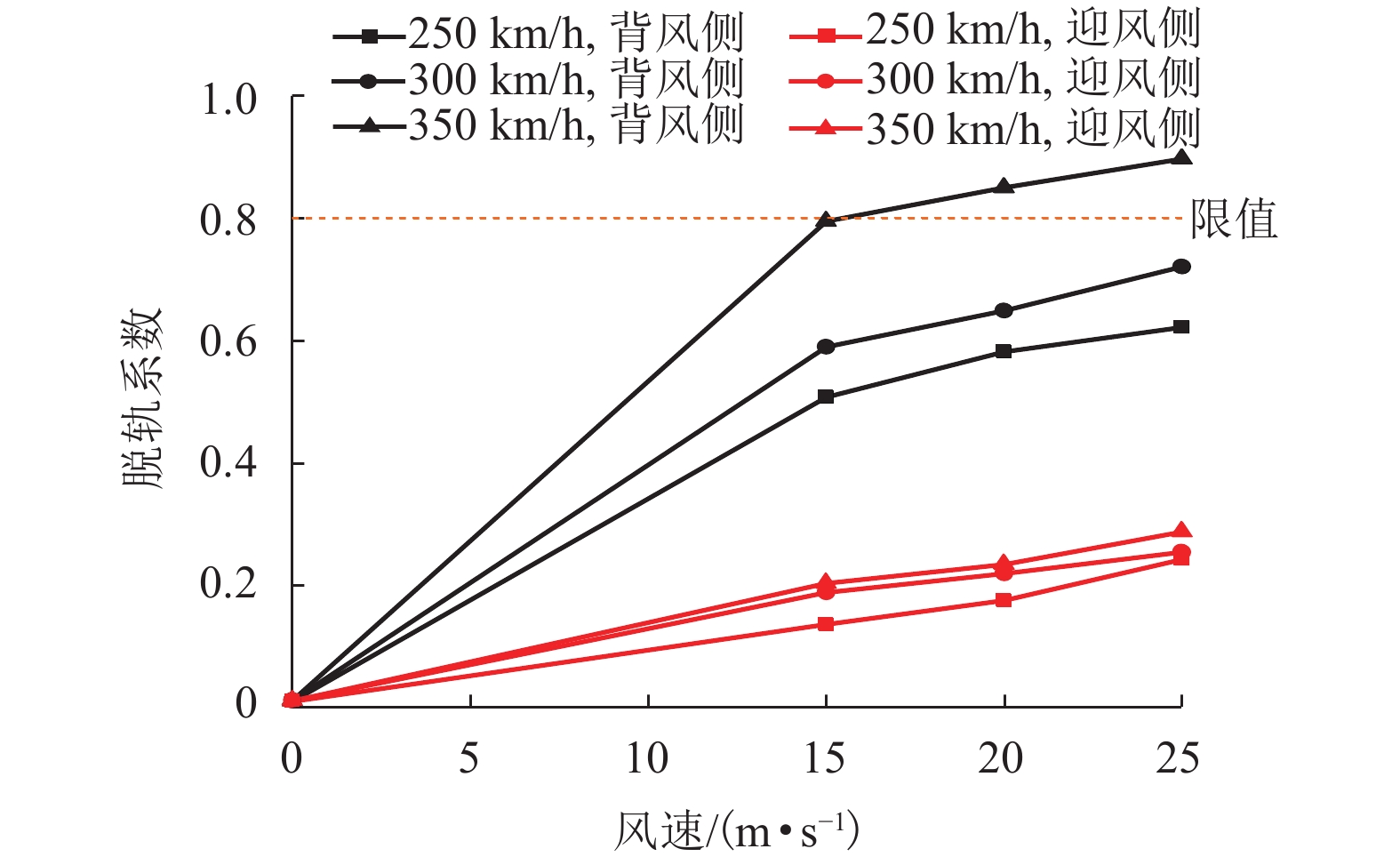
图 9 脱轨系数随车速和风速的变化规律
Figure 9. Derailment coefficient varying with vehicle speed and wind speed
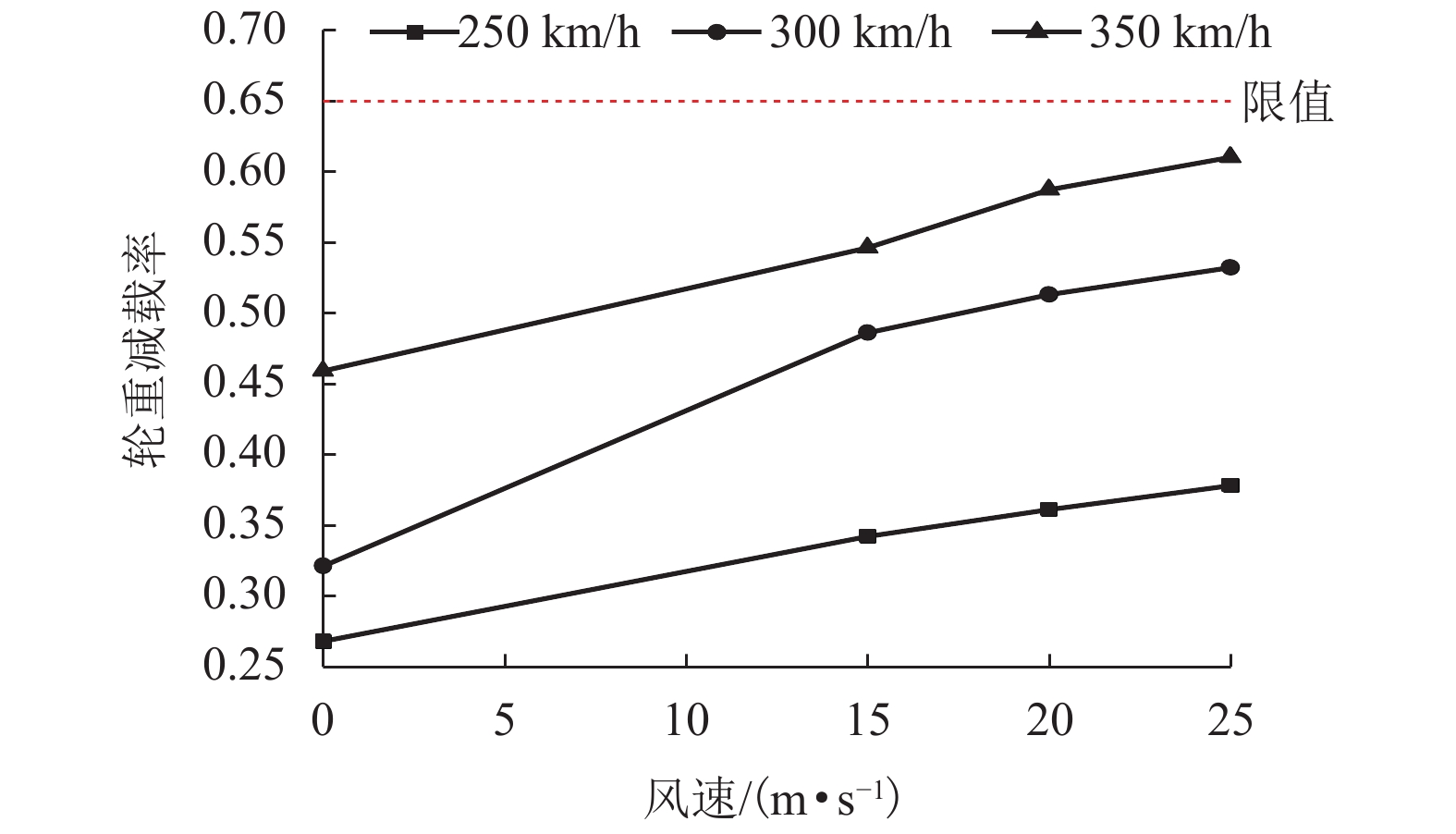
图 10 轮重减载率随车速和风速的变化规律
Figure 10. Rate of wheel load reduction varying with vehicle speed and wind speed
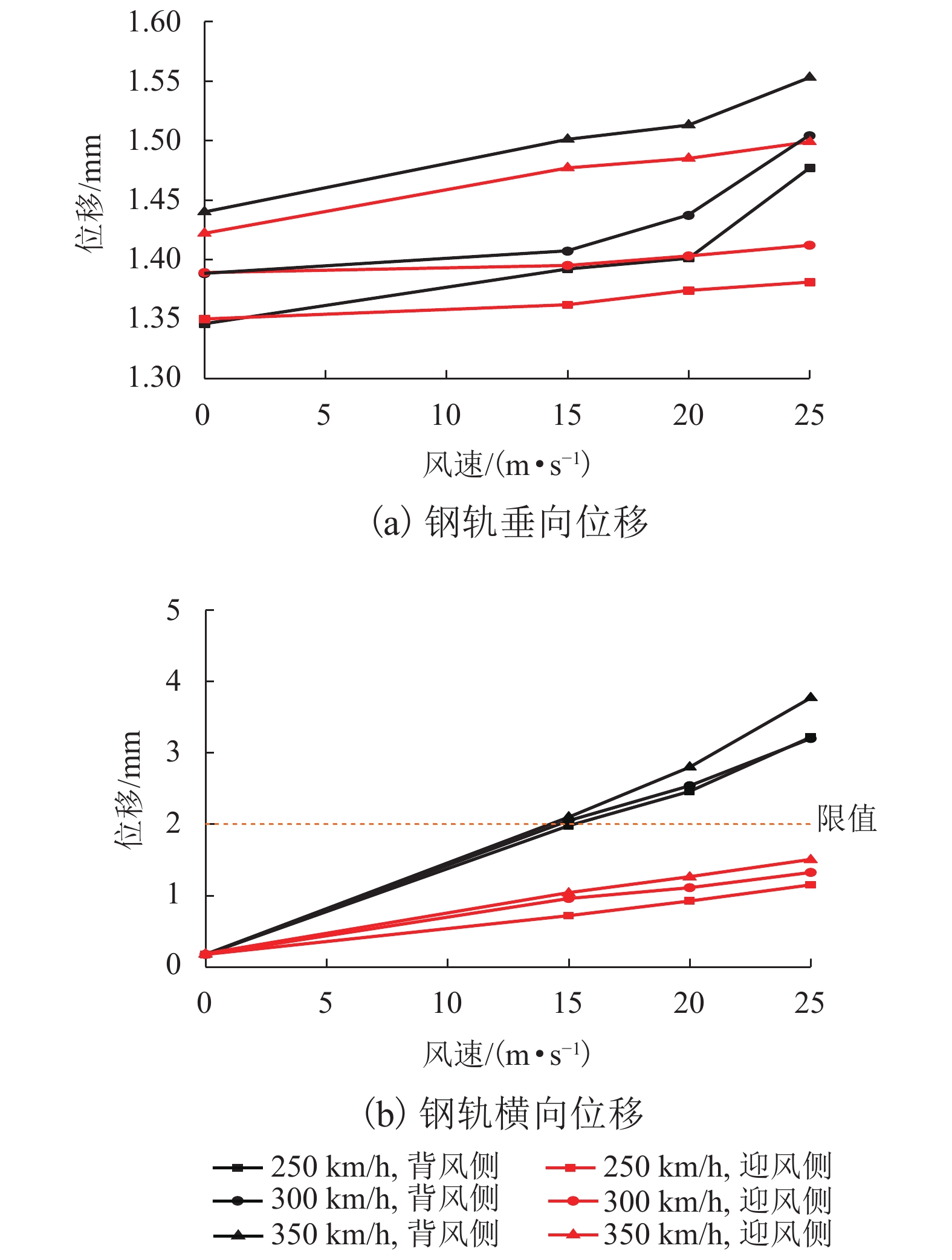
图 11 钢轨垂、横向位移随车速和风速的变化规律
Figure 11. Vertical and lateral displacements of rail varying with vehicle speed and wind speed
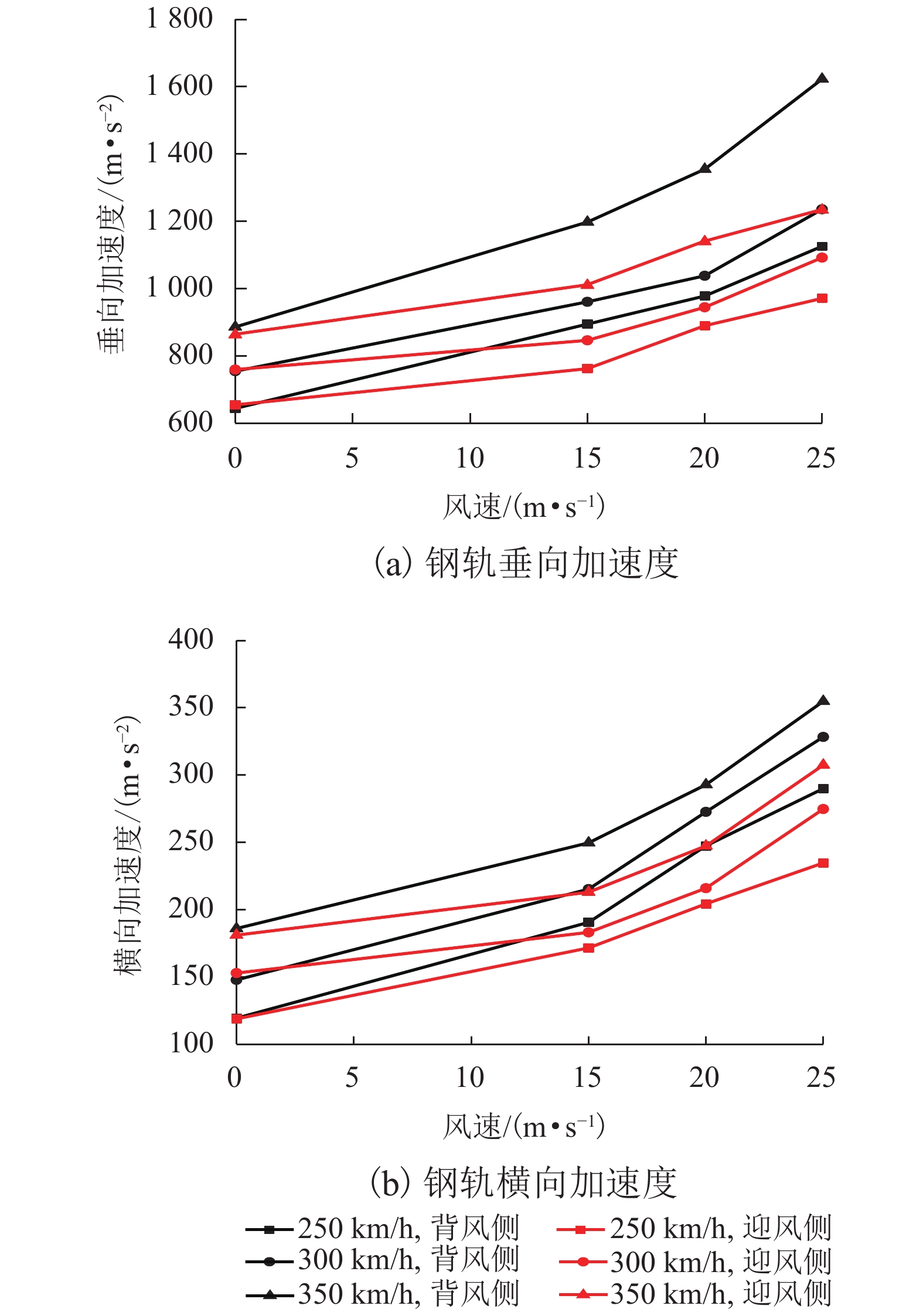
图 12 钢轨垂、横向加速度随车速和风速变化规律
Figure 12. Vertical and lateral accelerations of rail varying with vehicle speed and wind speed
表 1 轨道结构各部分材料参数
Table 1. Material parameters of each part of track structure
部件 密度/(kg•m−3) 杨氏模量/(N•mm−2) 泊松比 钢轨 7 830 2.1 × 105 0.300 轨道板 2 500 3.7 × 104 0.200 CA砂浆 2 450 7.0 × 103 0.167 支承层 2 400 1.8 × 104 0.167 基床表层 1 950 1.8 × 102 0.100 基床底层 1 900 8.0 × 10 0.100  下载: 导出CSV
下载: 导出CSV
表 2 轨距动态变化量
Table 2. Gauge dynamic change
mm 车速/
(km•h−1)风速
0~15 m/s风速
15~20 m/s风速
20~25 m/s250 1.69 1.14 2.66 300 2.73 1.92 1.12 350 3.45 1.59 1.78
下载: 导出CSV
-
刘庆宽,杜彦良,乔富贵. 日本列车横风和强风对策研究[J]. 铁道学报,2008,30(1): 82-88. doi: 10.3321/j.issn:1001-8360.2008.01.015LIU Qingkuan, DU Yanliang, QIAO Fugui. Train-crosswind and strong wind countermeasure research in Japan[J]. Journal of the China Railway Society, 2008, 30(1): 82-88. doi: 10.3321/j.issn:1001-8360.2008.01.015 高广军,田红旗,张健. 横风对双层集装箱平车运行稳定性的影响[J]. 交通运输工程学报,2004,4(2): 45-48. doi: 10.3321/j.issn:1671-1637.2004.02.011GAO Guangjun, TIAN Hongqi, ZHANG Jian. Cross-wind affection on double container train[J]. Journal of Traffic And Transportation Enigneering, 2004, 4(2): 45-48. doi: 10.3321/j.issn:1671-1637.2004.02.011 高广军,田红旗,姚松,等. 兰新线强横风对车辆倾覆稳定性的影响[J]. 铁道学报,2004,26(4): 36-40. doi: 10.3321/j.issn:1001-8360.2004.04.008GAO Guangjun, TIAN Hongqi, YAO Song, et al. Effect of strong cross-wind on the stability of trains running on the Lanzhou−Xingjiang railway line[J]. Journal of the China Railway Society, 2004, 26(4): 36-40. doi: 10.3321/j.issn:1001-8360.2004.04.008 任尊松,徐宇工,王璐雷,等. 强侧风对高速列车运行安全性影响研究[J]. 铁道学报,2006,28(6): 46-50. doi: 10.3321/j.issn:1001-8360.2006.06.008REN Zunsong, XU Yugong, WANG Lulei, et al. Study on the running safety of high-speed trains under Strong cross winds[J]. Journal of the China Railway Society, 2006, 28(6): 46-50. doi: 10.3321/j.issn:1001-8360.2006.06.008 于梦阁,张继业,张卫华. 平地上高速列车的风致安全特性[J]. 西南交通大学学报,2011,46(6): 989-995. doi: 10.3969/j.issn.0258-2724.2011.06.017YU Mengge, ZHANG Jiye, ZHANG Weihua. Wind-induced security of high-speed trains on the ground[J]. Journal of Southwest Jiaotong University, 2011, 46(6): 989-995. doi: 10.3969/j.issn.0258-2724.2011.06.017 康康,王文斌,陈羽,等. 横风定常空气动力作用下的铁道列车曲线行驶安全性分析[J]. 铁道机车车辆,2009,29(5): 11-13.KANG Kang, WANG Wenbin, CHEN Yu, et al. Operating safety analysis of the high speed train running on a curve under the steady characteristics forces of cross wind[J]. Railway Locomotive & Car, 2009, 29(5): 11-13. 郗艳红. 横风作用下的高速列车气动特性及运行安全性研究[D]. 北京: 北京交通大学, 2012. 毛军,郗艳红,高亮,等. 横风作用下高速列车气动阻力[J]. 中南大学学报(自然科学版),2014,45(11): 4059-4067.MAO Jun, XI Yanhong, GAO Liang, et al. Aerodynamic drag of high-speed train under cross wind conditions[J]. Journal of Central South University (Science and Technology), 2014, 45(11): 4059-4067. 郗艳红,毛军,高亮,等. 横风作用下高速列车安全运行速度限值的研究[J]. 铁道学报,2012,34(6): 8-14. doi: 10.3969/j.issn.1001-8360.2012.06.002XI Yanhong, MAO Jun, GAO Liang, et al. Research on the limited safe speed of a high-speed train under cross wind[J]. Journal of the China Railway Society, 2012, 34(6): 8-14. doi: 10.3969/j.issn.1001-8360.2012.06.002 毛军,马小云,郗艳红. 基于流动模拟和动力学仿真的高速列车横风运行稳定性研究[J]. 北京交通大学学报,2011,35(1): 44-48. doi: 10.3969/j.issn.1673-0291.2011.01.011MAO Jun, MA Xiaoyun, XI Yanhong. Research on the running stability of high-speed trains under the cross wind by means of simulation[J]. Journal of Beijing Jiaotong University, 2011, 35(1): 44-48. doi: 10.3969/j.issn.1673-0291.2011.01.011 KHIER W, BREUER M, DURST F. Numerical computation of 3-D turbulent flow around high-speed trains under side wind conditions[J]. Notes on Numerical Fluid Mechanics, 2002, 79: 75-86. DORIGATTI F, STERLING M, BAKER C J, et al. Crosswind effects on the stability of a model passenger train−a comparison of static and moving experiments[J]. Journal of Wind Engineering & Industrial Aerodynamics, 2015, 138: 36-51. BETTLE J, HOLLOWAY A G L, VENART J E S. A computational study of the aerodynamic forces acting on a tractor-trailer vehicle on a bridge in cross-wind[J]. Journal of Wind Engineering & Industrial Aerodynamics, 2003, 91(5): 573-592. SAGAUT P. Large eddy simulation for incompressible flows:an introduction[J]. Scientific Computation, 2001, 12(10): 1745-1746. HEMIDA H, KRAJNOVIC S. LES study of the influence of a train-nose shape on the flow structures under the influence of a cross-wind[J]. Journal of Fluids Engineering, 2008, 130(9): 091101. doi: 10.1115/1.2953228 张兆顺, 崔桂香. 流体力学[M]. 3版. 北京: 清华大学出版社. 2015: 60-68. SUZUKI M, TANEMOTO K, MAEDA T, et al. Aerodynamic characteristics of train/vehicles under cross winds[J]. Journal of Wind Engineering & Industrial Aerodynamics, 2001, 91(1): 209-218. 郗艳红,毛军,李明高,等. 高速列车侧风效应的数值模拟[J]. 北京交通大学学报,2010,34(1).XI Yanhong, MAO Jun, LI Minggao, et al. Numerical study on the crosswind effects of high-speed train[J]. Journal of Beijing Jiaotong University, 2010, 34(1). 宋琛,张继业,刘楠. 风沙环境下高速列车气动性能研究[J]. 机械,2016,43(6): 36-41.SONG Chen, ZHANG Jiye, LIU Nan. Aerodynamic characteristics of high-speed trains in sandstorm[J]. Machinery, 2016, 43(6): 36-41. 中华人民共和国铁道部. 客运专线无砟轨道铁路设计指南: 铁建设函[2005]754号[S]. 北京: 中国铁道出版社, 2005. 陈宪麦,王澜,陶夏新,等. 我国干线铁路通用轨道谱的研究[J]. 中国铁道科学,2008,29(3): 73-77. doi: 10.3321/j.issn:1001-4632.2008.03.014CHEN Xianmai, WANG Lan, TAO Xiaxin, et al. Study on general track spectrum for Chinese main railway lines[J]. China Railway Science, 2008, 29(3): 73-77. doi: 10.3321/j.issn:1001-4632.2008.03.014 中华人民共和国铁道部. 高速铁路工程动态验收技术规范: TB10761—2013[S]. 北京: 中国铁道出版社, 2013. 中华人民共和国铁道部. 高速铁路无砟轨道线路维修规则(试行): TG/GW115—2012[S]. 北京: 中国铁道出版社, 2012 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 755
- HTML全文浏览量: 451
- PDF下载量: 27
- 被引次数: 0