

Microstructural Characteristics and Modification Mechanism of Inorganic Fine Particles in Buton Rock Asphalt
-
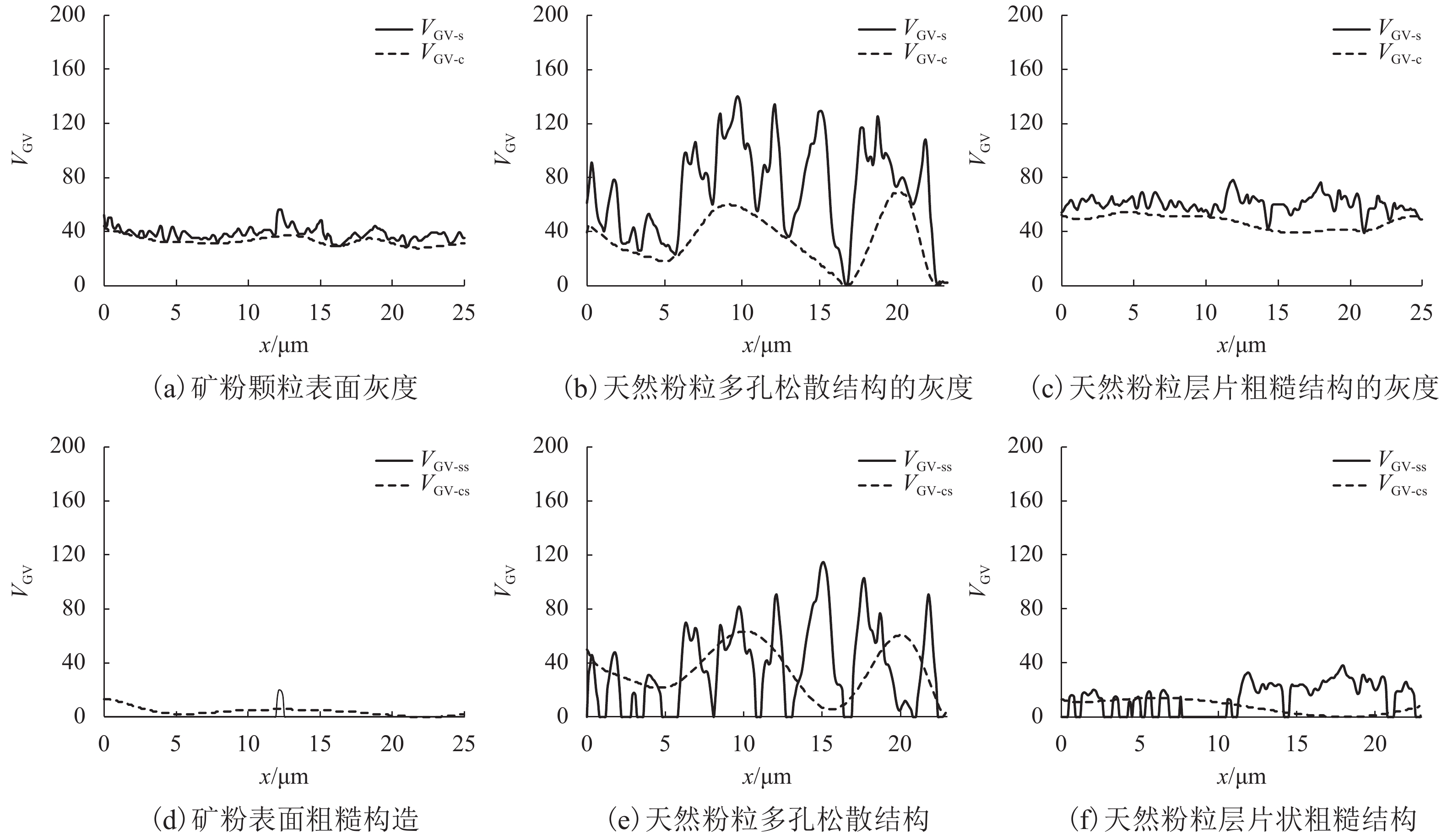
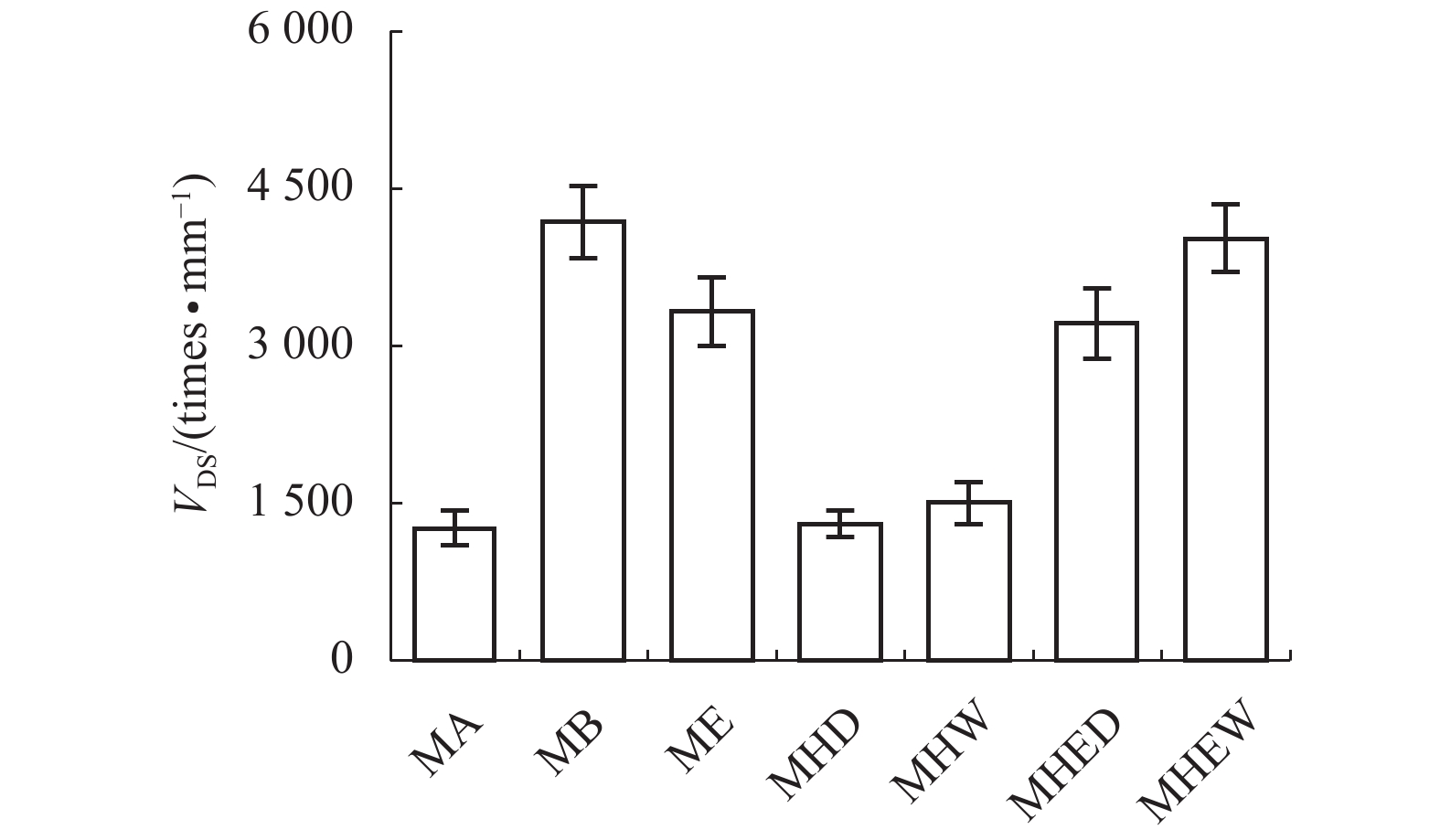
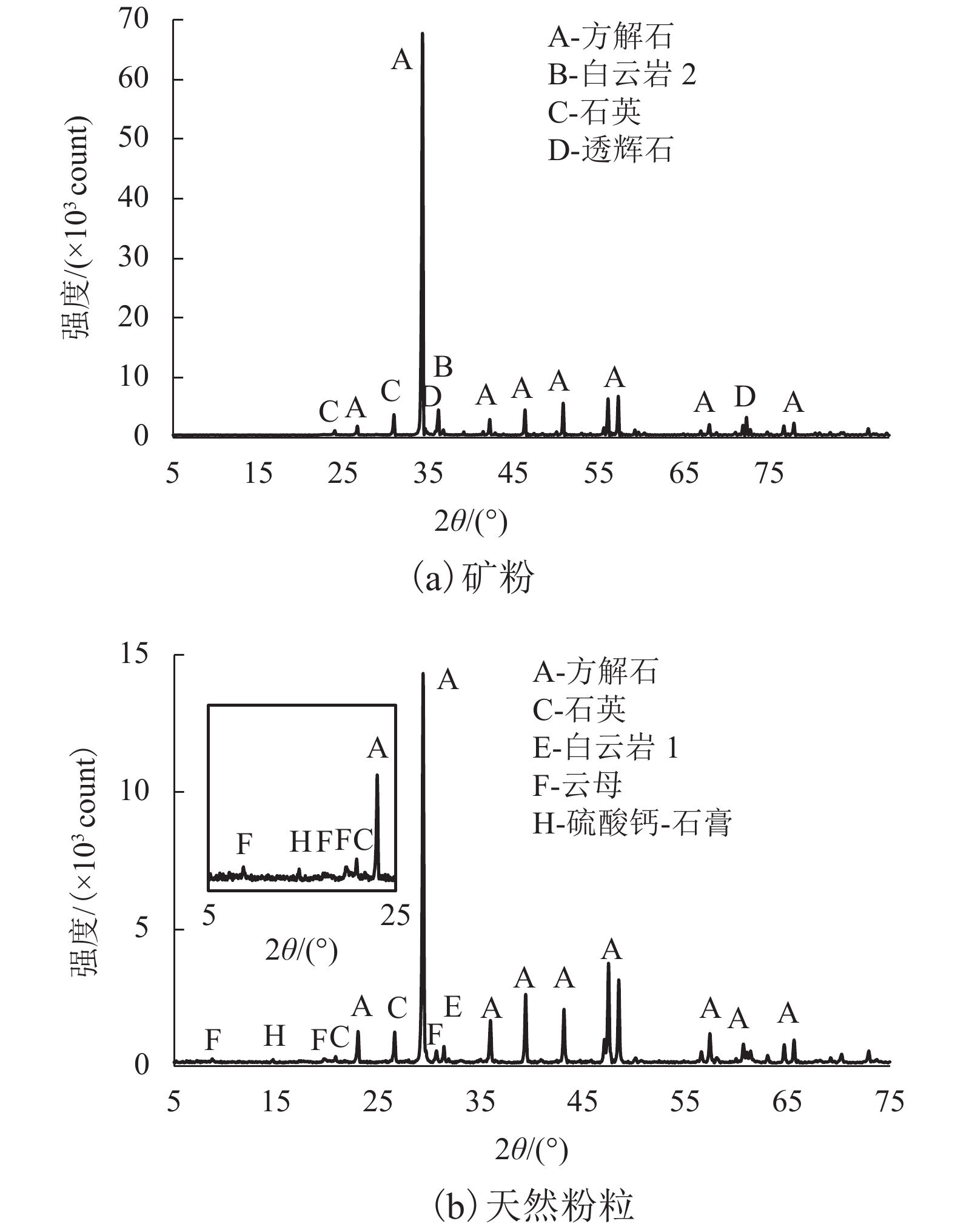
摘要: 为了研究布敦岩沥青(Buton rock asphalt,BRA)中天然无机粉粒在沥青混合料改性过程中的作用,对布敦岩沥青中天然无机粉粒的特性和改性效果进行了分析. 利用X射线衍射(X-ray diffraction,XRD)、扫描电子显微镜(scanning electron microscopy,SEM)测定了无机粉粒的X射线衍射谱和微观图像;通过K值法和灰度图像处理,分析了布敦岩沥青中的天然无机粉粒的矿物组分、微观特征及其形成机制;采用动态剪切流变试验和混合料性能试验,测定了天然粉粒对胶浆和混合料性能的影响. 结果表明:布敦岩沥青中天然无机粉粒含有约85%的碳酸岩,主要由古海洋生物残骸形成;其余约15%成分为石英、云母和石膏,比例约为7∶6∶1,颗粒表面覆盖的层状和片状晶体构成的微观粗糙构造的面积可达80%以上;原始微观形貌特征和有机胶结料对粉粒微观构造的填充状态是影响天然粉粒改性效果的主要因素,以天然无机粉粒取代机制矿粉使沥青胶浆车辙因子最多提高0.524 kPa,动稳定度提高18.8%,冻融劈裂强度提高5.1%,冻融劈裂强度比提高至83.5%以上;复合改性时,天然无机粉粒能够作为助剂改善沥青质改性胶结料和沥青混合料的性能. 当采用天然沥青质改性时,无机粉粒使沥青胶浆车辙因子提高0.674~0.910 kPa,动稳定度提高21.1%~25.6%,冻融劈裂强度提高3.5%~5.6%,冻融劈裂强度比由85%提高至90%以上.Abstract: The properties of natural inorganic fine particles in Buton rock asphalt (BRA) and the effects of asphalt modification on these particles were analyzed in order to study the role of the natural inorganic fine particles in the process of asphalt mixture modification. First, X-ray diffraction (XRD) patterns and microscopic images of the inorganic fine particles were obtained using X-ray diffraction and scanning electron microscopy (SEM). Secondly, the mineral composition, microscopic characteristics, and mechanism of the formation of the natural inorganic fine particles in BRA were analyzed through the K value method and grayscale image processing. Finally, the effects of the inorganic particles on the performances of mastic and asphalt mixtures were determined using the dynamic shear rheological test (DSR) and mixture performance tests. The results show that the natural inorganic fine particles in BRA contain approximately 85% carbonatite, which is mainly formed from the remains of ancient halobios and partially retained the primary structure. The content of non–carbonate inorganic minerals reaches 15%, of which the proportions of quartz, muscovite, and gypsum are approximately 7:6:1. The surface area of the particles covered by micro-rough structures composed of layered and tabular crystals can reach more than 80%. The preservation of the original microstructural characteristics, recovery, and the enhancement of the organic binder filling state of the microstructure are the main factors responsible for the modification effect of the natural particles. The partial substitution of artificial mineral particles by natural inorganic fine particles can increase the rutting factor of the asphalt mastic, dynamic stability, and freeze-thaw tensile strength by 0.524 kPa, 18.8%, and 5.1% respectively, and the tensile strength ratio can increase to more than 83.5%. The use of natural inorganic fine particles as an aid in compound modifiers improves the performance of the mastic and asphalt mixtures. When the mastic or mixture is modified with natural asphaltene, the natural inorganic fine particles increase the rutting factor of the asphalt mastic, dynamic stability, and freeze-thaw tensile strength by 0.674–0.910 kPa, 21.1%–25.6%, and 3.5%–5.6% respectively, and the tensile strength ratio increases from 85% to more than 90%.
-
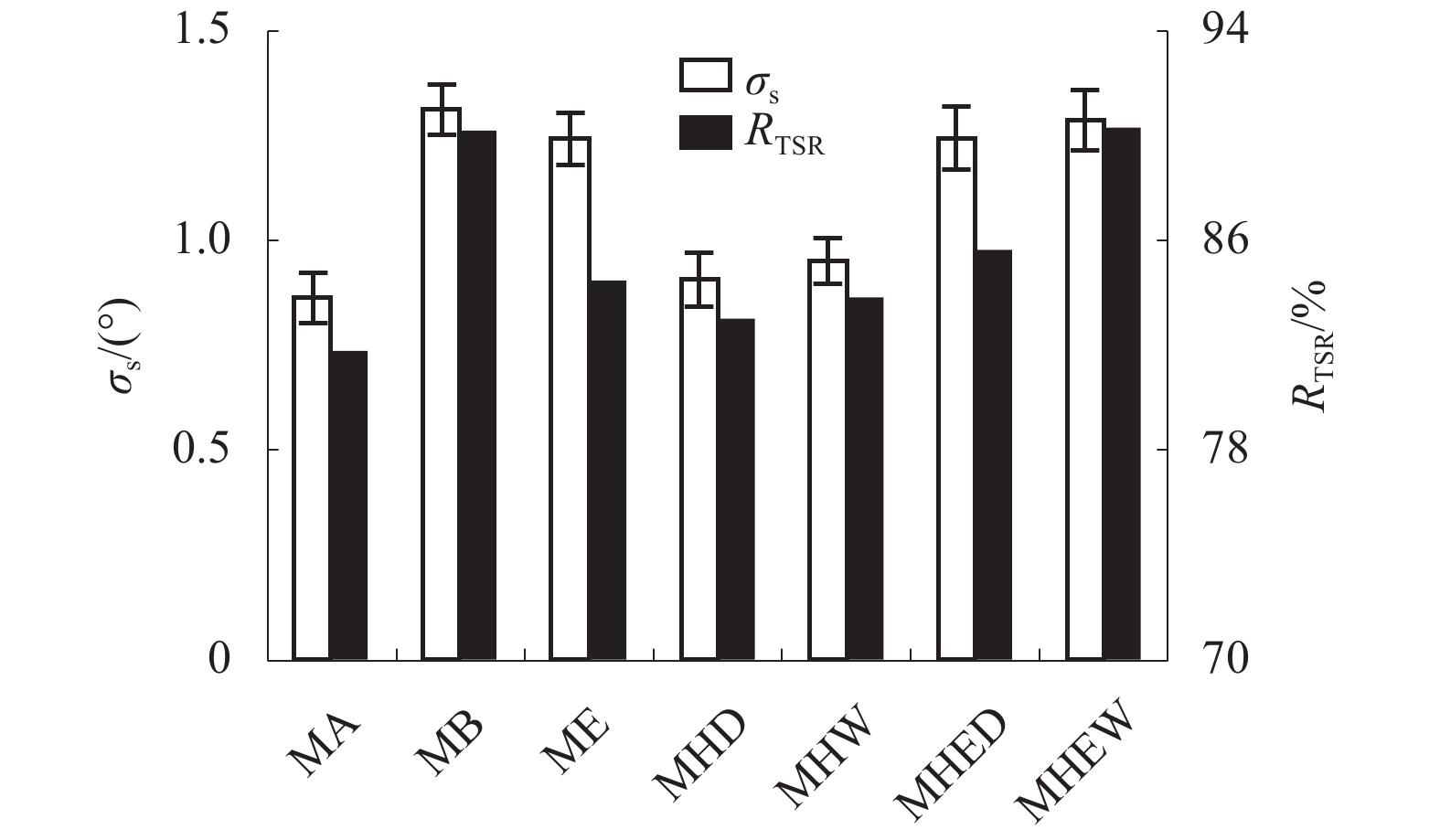
图 7 劈裂强度σs和冻融劈裂残余强度比RTSR
Figure 7. Splitting strength σs and tensile strength ratio RTSR
表 1 无机颗粒粒度分布
Table 1. Size distribution of the inorganic particles
无机颗粒材料 筛孔尺寸/mm 16.000 13.200 9.500 4.750 2.360 1.180 0.600 0.300 0.150 0.075 天然粉粒 100.0 100.0 96.0 86.3 人工磨细矿粉 100.0 99.8 92.8 78.9 沥青混合料中的无机颗粒(级配) 100.0 95.0 75.0 49.0 26.1 19.2 14.9 10.3 7.4 5.2  下载: 导出CSV
下载: 导出CSV
表 2 无机颗粒化学组成
Table 2. Chemical composition of the inorganic particles
材料 CaO SiO2 MgO Al2O3 Fe2O3 SO3 TiO2 K2O Na2O P2O5 天然粉粒 44.69 9.23 3.53 1.57 0.26 0.58 0.15 0.47 0.12 0.07 人工磨细矿粉 50.71 3.52 5.80 0.21 0.15 0.01 0.01 0.02 0.02
下载: 导出CSV
表 3 沥青混合料中沥青胶浆的配比
Table 3. Compositions of asphalt mastic in mixture
沥青
混合料沥青胶浆 矿粉 天然粉粒 EBRA BRA 沥青 MA AMA 100.0 100.0 MB AMB 69.2 40.0 90.8 ME AME 100.0 9.2 90.8 MHD AMH 69.2 30.8 100.0 MHW AMH 69.2 30.8 100.0 MHED AMHE 69.2 30.8 9.2 90.8 MHEW AMHE 69.2 30.8 9.2 90.8
下载: 导出CSV
表 4 预拌胶浆配比
Table 4. Compositions of premixed mastic
预拌沥青胶浆 矿粉 天然粉粒 EBRA BRA 沥青 AMA 30.8 100.0 AMB 40.0 90.8 AME 9.2 90.8 AMAE 30.8 9.2 90.8 AMH 30.8 90.8 AMHE 30.8 9.2 90.8
下载: 导出CSV
表 5 无机颗粒(X射线衍射分析)的矿物组成
Table 5. Mineralogical composition of inorganic particles(based on XRD)
矿物名称 K值 天然粉粒 人工磨细矿粉 晶格间距/Å wB% 晶格间距/Å wB% 方解石 3.21 3.043 82.60 3.039 85.39 石英 2.93 3.355 7.03 3.350 4.01 白云岩1 2.35 2.916 3.70 白云岩2 2.47 2.889 8.30 透辉石 1.19 2.994 2.30 云母 0.39 10.130 5.99 硫酸钙-石膏 3.42 6.021 0.69 注:云母的元素组合为Al∶Ca∶Fe∶H∶K∶Mg∶Na∶O∶Si∶Ti = 275∶1.1∶3.2∶200∶72.7∶2.2∶17∶1200∶312.8∶2
下载: 导出CSV
-
SUBAGIO B S, SISWOSOEBROTHO B, KARSAMAN R. Development of laboratory performance of Indonesian rock asphalt (ASBUTON) in hot rolled asphalt mix[C]//Proceedings of the Eastern Asia Society for Transportation Studies. Satoh K: [s.n.], 2003: 436-449 SUARYANA N. Performance evaluation of stone matrix asphalt using Indonesian natural rock asphalt as stabilizer[J]. International Journal of Pavement Research and Technology, 2016, 9(5): 387-392. doi: 10.1016/j.ijprt.2016.09.007 HADIWARDOYO S P, FIKRI H. Use of Buton asphalt additive on moisture damage sensitivity and rutting performance of asphalt mixtures[J]. Civil and Environmental Research, 2013, 3(3): 100-109. HADIWARDOYO S P, SINAGA E S, FIKRI H. The influence of Buton asphalt additive on skid resistance based on penetration index and temperature[J]. Construction and Building Materials, 2013, 42(9): 5-10. SUBAGIO B S, KARSAMAN R H, ADWANG J, et al. Fatigue performance of HRA (hot rolled asphalt) and superpave® mixes using Indonesian rock asphalt (Asbuton) as fine aggregates and filler[J]. Journal of the Eastern Asia Society for Transportation Studies, 2005(6): 1207-1216. ZAMHARI K A, HERMADI M, ALI M H. Comparing the performance of granular and extracted binder from Buton rock asphalt[J]. International Journal of Pavement Research and Technology, 2014, 7(1): 25-30. 孙秋健,车淳万. 伊朗天然岩沥青的共混性与其化学组成的关系[J]. 石油沥青,2012,26(5): 64-67. doi: 10.3969/j.issn.1006-7450.2012.05.014SUN Qiujian, CHE Chunwan. Relationship of Iranian rockasphalt’s applicability of pre-mixing with its chemical composition[J]. Petroleum Asphalt, 2012, 26(5): 64-67. doi: 10.3969/j.issn.1006-7450.2012.05.014 姚婷,宗志敏,王玉高,等. 克拉玛依天然沥青的溶解性及重要生物标志物组成分析[J]. 西安石油大学学报(自然科学版),2012,27(5): 71-77. doi: 10.3969/j.issn.1673-064X.2012.05.016YAO Ting, ZONG Zhimin, WANG Yugao, et al. Dissolvability and primary biomarkers of Karamay natural bitumen[J]. Journal of Xi’an Shiyou University (Natural Science Edition), 2012, 27(5): 71-77. doi: 10.3969/j.issn.1673-064X.2012.05.016 李平,季文广,查旭东,等. 特立尼达湖沥青中灰分特性研究[J]. 公路交通科技,2014,31(7): 39-44. doi: 10.3969/j.issn.1002-0268.2014.07.007LI Ping, JI Wenguang, ZHA Xudong, et al. Research on character of ash in Trinidad Lake Asphalt[J]. Journal of Highway and Transportation Research and Development, 2014, 31(7): 39-44. doi: 10.3969/j.issn.1002-0268.2014.07.007 刘树堂,杨永顺,房建果,等. 布敦岩沥青改性沥青混合料试验研究[J]. 同济大学学报(自然科学版),2007,35(3): 351-355. doi: 10.3321/j.issn:0253-374X.2007.03.012LIU Shutang, YANG Yongshun, FANG Jianguo, et al. Experimental research of bituminous mixtures modified by Button rock asphalt[J]. Journal of Tongji University (Natural Science), 2007, 35(3): 351-355. doi: 10.3321/j.issn:0253-374X.2007.03.012 ZHANG K, ZHANG K. Physicochemical characteristic and potential utilization of an Indonesian asphaltic sand[J]. Energy Sources,Part A:Recovery,Utilization and Environmental Effects, 2014, 36(24): 2745-2750. 文龙,王晓江,柳浩,等. 布敦岩天然沥青的材料特性与改性机理分析[J]. 公路,2011(6): 142-145. doi: 10.3969/j.issn.1009-6477.2011.06.035WEN Long, WANG Xiaojiang, LIU Hao, et al. Aterial properties and modified mechanism analysis of Buton rock asphalt[J]. Highway, 2011(6): 142-145. doi: 10.3969/j.issn.1009-6477.2011.06.035 DEVIANTO I M, BUDIANTA L, SUSANTO B H, et al. Asphalt production from Asbuton rock by extraction using weak acid[J]. Chemical and Materials Engineering, 2013, 1(2): 35-42. NASIKIN M, SAPUTRA A Y, SUSANTO B H. Extraction of CaCO3 as Indonesia natural asphalt (Asbuton)’s impurities in acidic brine water solution using semi batch system with CO2 gas cycle method to produce asphalt[J]. Journal of Chemical and Pharmaceutical Research, 2015, 7(5): 677-682. 陆学元,张素云,吴一帆. 布敦岩矿料对沥青混合料性能的影响[J]. 建筑材料学报,2015,18(3): 450-457. doi: 10.3969/j.issn.1007-9629.2015.03.016LU Xueyuan, ZHANG Suyun, WU Yifan. Influence of Buton rock on performance of asphalt mixture[J]. Journal of Building Material, 2015, 18(3): 450-457. doi: 10.3969/j.issn.1007-9629.2015.03.016 王明,林发金,刘黎萍. 布敦岩沥青灰分胶浆动态流变性能和微细观特性[J]. 同济大学学报(自然科学版),2016,44(4): 567-571.WANG Ming, Lin Fajin, LIU Liping. Dynamic rheological properties and microscopic characteristics of ash mastics[J]. Journal of Tongji University (Natural Science), 2016, 44(4): 567-571. AFFANDI F. The performance of bituminous mixes using Indonesia natural asphalt[C]//Proceeding of 25th ARRB Conference. Perth: [s.n.], 2012: 1-12 姜尧发,唐跃刚,代世峰,等. 浙江煤山二叠系顶部石灰岩中高温石英副像及其地质意义[J]. 矿物学报,2013,33(3): 337-343.JIANG Yaofa, TANG Yuegang, DAI Shifeng, et al. A study on high quartz paramorph and geological significance at the uppermost limestone of permian system in Meishan of Zhejiang,China[J]. Acta Mineralogica Sinica, 2013, 33(3): 337-343. 江超华. 多晶X射线衍射技术与应用[M]. 北京: 化学工业出版社, 2013: 211-218 材料研究与测试方法实验编写组. 材料研究与测试方法实验[M]. 武汉: 武汉理工大学出版社, 2011: 70-74 汪正金. 钙质砂微结构特征与力学特性的耦合关系研究[D]. 长春: 吉林大学, 2014 汪轶群,洪义,国振,等. 南海钙质砂宏细观破碎力学特性[J]. 岩土力学,2018,39(1): 199-206.WANG Yiqun, HONG Yi, GUO Zhen, et al. Micro-and macro-mechanical behavior of crushable calcareous sand in South China Sea[J]. Rock and Soil Mechanics, 2018, 39(1): 199-206. HALL R, Encyclopedia of Islands, " Indonesia, geology”[M]. Berkeley: Univ. California Press, 2009: 454-460 ARISONA A, NAWAWI M, NURADDEEN U K, et al. A preliminary mineralogical evaluation study of natural asphalt rock characterization,southeast Sulawesi,Indonesia[J]. Arabian Journal of Geosciences, 2016, 9(4): 1-9. CHAERUL M, NGKOIMANI L O, SADRI S. Limestone facies and diagenesis on Tondo formation at Kaisabu village Bau-Bau city southeast Sulawesi province[J]. Journal of Geosciences,Engineering,Environment and Technology, 2017, 2(1): 9-13. -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 614
- HTML全文浏览量: 402
- PDF下载量: 20
- 被引次数: 0