

Ship Dynamic Collision Avoidance Mechanism Based on Course Control System
-
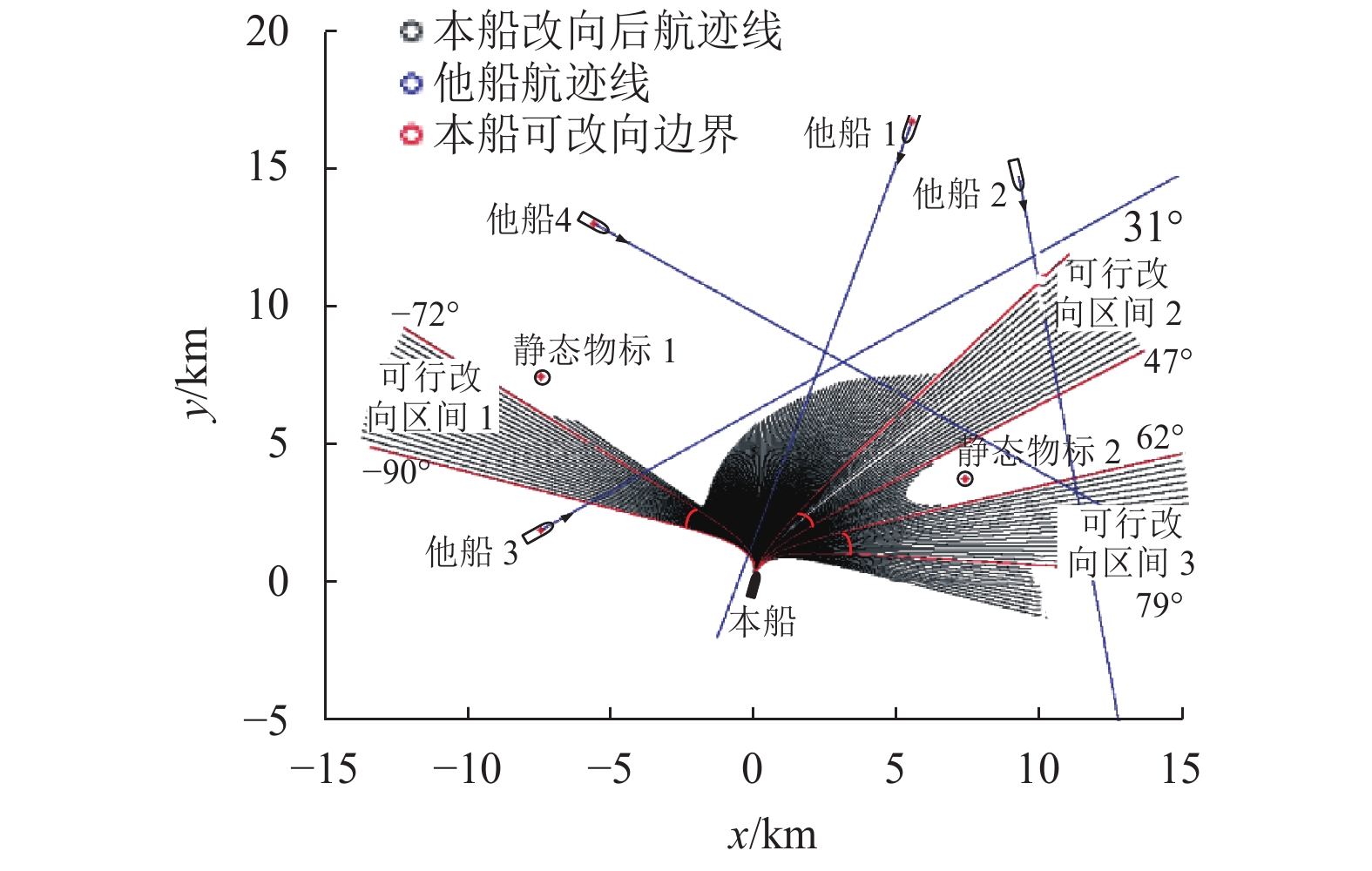
摘要: 为探索航速矢量变化与船舶避碰之间的动态变化规律(避碰机理),研究了结合船舶领域和速度障碍等方法的静态避碰机理,确定了不考虑船舶改向运动过程与周围环境变化前提下,本船可避让所有物标的航速矢量区间;建立了基于模糊自适应比例积分微分(PID)控制和船舶运动方程的航向控制系统,再现船舶改向过程中的航速矢量非线性变化;基于静态避碰机理和航向控制系统研究了船舶动态避碰机理,求解了符合船舶操纵运动过程的动态避碰改向区间. 研究结果表明,在开阔水域随机设置的多物标环境中,可得到符合航速矢量非线性变化的动态避碰改向区间集合 [−90°,−72°]、[31°,47°]、[62°,79°],受动态船舶主要影响形成改向范围为(−72°,31°)、(79°,90°] 的碰撞航向区间,符合船舶操纵运动对改向避碰的影响规律,可为实现船舶避碰辅助决策、自动避碰和动态避碰路径规划提供基础理论和方法.
-
关键词:
- 避碰机理 /
- 速度障碍 /
- 船舶领域 /
- 模糊自适应比例积分微分(PID)控制 /
- MMG(分离型船舶操纵运动模型)
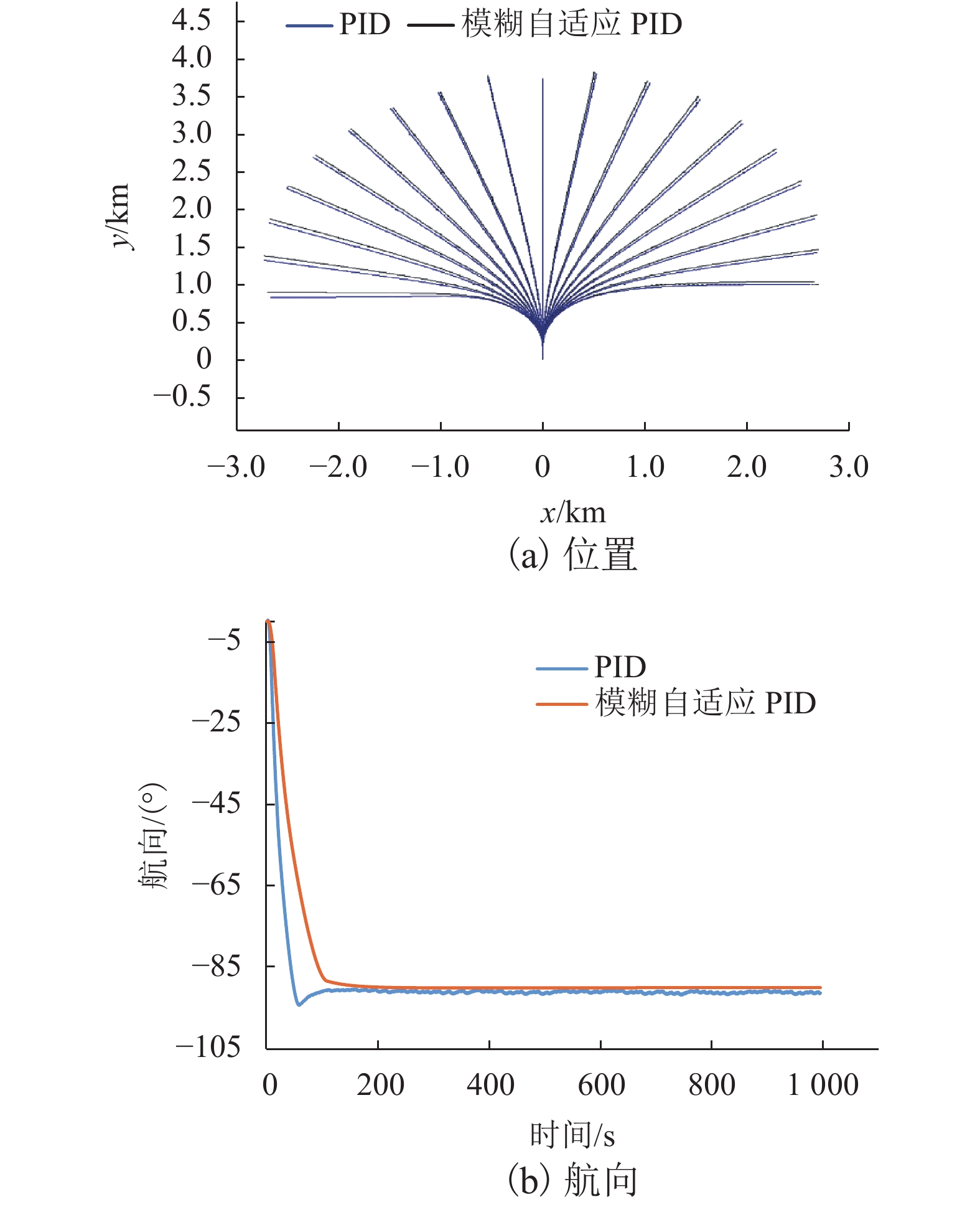
Abstract: To explore the relationship between the variation of ship speed vector and the effect of collision avoidance, the static collision avoidance mechanism with the combination of ship domain and velocity obstacle methods was analyzed. Ship speed vector range for the avoidance of all objects without considering the motion process of ship course altering and the external environment was then determined. A course control system based on fuzzy adaptive proportional integral differential (PID) and ship motion equations was developed to reconstruct the nonlinear variation of ship speed vector during course altering process. The dynamic collision avoidance mechanism was then established based on the static collision avoidance mechanism and the course control system. The dynamic course altering range that satisfies the non-linear variation of ship speed was then obtained. The results indicate that in open waters where multiple objects are randomly located, the course altering ranges that satisfy the non-linear speed variation are [−90°, −72°], [31°, 47°], [62°, 79°], under the influence of ship dynamics, the course altering ranges that could cause collision are (−72°, 31°), (79°, 90°]. The obtained results are consistent with the influence of ship motion characteristics on collision avoidance with course altering and can provide a theoretical reference for the development of decision-support for ship collision avoidance, automatic collision avoidance and dynamic ship route planning. -
图 3 不考虑转向过程的速度障碍区
Figure 3. Velocity obstacle area without consideration of the steering process
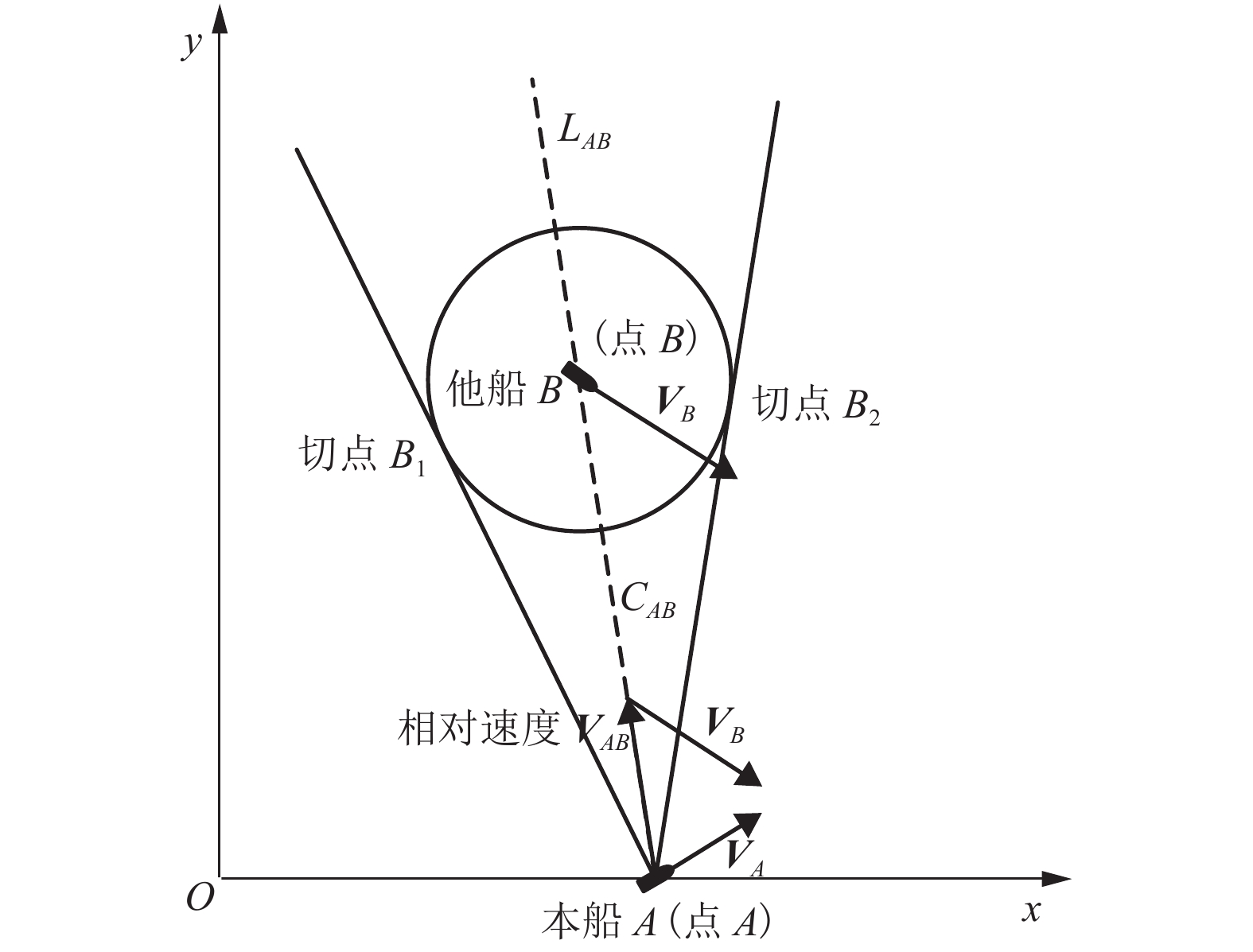
图 6 船舶领域速度障碍真运动示意
Figure 6. Sketch map of true motion based on ship domain and speed obstacle
表 1 船舶资料
Table 1. Ship information
对象 数值 对象 数值 排水量/t 90 000 螺旋桨转速/(r•min−1) 90 船长/m 225 舵面积/ m2 56.88 船宽/m 32.5 螺旋桨进距/m 4.738 吃水/m 14.5 水密度/(kg•m−3) 1 000  下载: 导出CSV
下载: 导出CSV
表 2 物标初始状态
Table 2. Initial state of objects
物标 坐标 航向/(°) 航速/kn 他船 1 (3,9) 200 10 他船 2 (5,8) 170 12 他船 3 (−4,1) 60 13 他船 4 (−3,7) 120 11 静态物标 1 (−4,4) 静态物标 2 (4,2)
下载: 导出CSV
-
张金奋,严新平,陈先桥,等. 基于概率分布的长江干线水上交通事故分析[J]. 中国航海,2012(3): 81-84. doi: 10.3969/j.issn.1000-4653.2012.03.018ZHANG Jinfen, YAN Xinping, CHEN Xianqiao, et al. Analysis of traffic accidents on the Yangtze River trunk line based on probability distribution[J]. Navigation of China, 2012(3): 81-84. doi: 10.3969/j.issn.1000-4653.2012.03.018 中国船级社. 智能船舶规范(2015)[S]. 北京: 中国船级社, 2015. CALVERT E S. ManÅuvres to ensure the avoidance of collision[J]. Journal of Navigation, 1960, 50(3): 400-410. JONES K D. Application of a manœuvre diagram to multi-ship encounters[J]. Journal of Navigation, 1974, 27(1): 19-27. doi: 10.1017/S0373463300025133 DEGRÉ T, LEFÈVRE X. A collision avoidance system[J]. Journal of Navigation, 1981, 34(2): 294-302. doi: 10.1017/S0373463300021408 PEDERSEN E, INOUE K, TSUGANE M. Evaluation of a radar plot and display technique for anti-collision assessment to multiple targets in true vector representation by application of the environmental stress model[J]. Journal Japan Institute of Navigation, 2002, 106: 1-12. doi: 10.9749/jin.106.1 熊勇,贺益雄,黄立文. 基于速度障碍的多船自动避碰控制方法[J]. 中国航海,2015(3): 46-51. doi: 10.3969/j.issn.1000-4653.2015.03.011XIONG Yong, HE Yixiong, HUANG Liwen. Multi-ship collision avoiding control considering velocity obstacle[J]. Navigation of China, 2015(3): 46-51. doi: 10.3969/j.issn.1000-4653.2015.03.011 吴博,熊勇,文元桥. 基于速度障碍原理的无人艇自动避碰算法[J]. 大连海事大学学报,2014(2): 13-16.WU Bo, XIONG Yong, WEN Yuanqiao. Automatic collision avoidance algorithm for unmanned surface vessel based on velocity obstacles[J]. Journal of Dalian Maritime University, 2014(2): 13-16. 贺益雄,黄立文,牟军敏,等. 交叉相遇局面让路船自动避碰行动方案[J]. 哈尔滨工程大学学报,2015,36(8): 1024-1029.HE Yixiong, HUANG Liwen, MOU Junmin, et al. A scheme for automatic collision avoidance of a give-way vessel in the crossing situation[J]. Journal of Harbin Engineering University, 2015, 36(8): 1024-1029. FIORINI P. Motion planning in dynamic environments using velocity obstacles[J]. International Journal of Robotics Research, 1998, 17(7): 760-772. doi: 10.1177/027836499801700706 周丹. 一种新动态模糊船舶领域模型研究[D]. 大连: 大连海事大学, 2017. 齐乐,郑中义,李国平. 互见中基于AIS数据的船舶领域[J]. 大连海事大学学报,2011,37(1): 48-50.QI Le, ZHENG Zhongyi, LI Guoping. AIS-data-based ship domain of ships in sight of one another[J]. Journal of Dalian Maritime University, 2011, 37(1): 48-50. 王鸿健. 模糊自适应PID控制的船舶航向控制器设计[J]. 工业控制计算机,2016(3): 86-87. doi: 10.3969/j.issn.1001-182X.2016.03.039WANG Hongjian. Design of ship steering controller based on fuzzy adaptive PID control[J]. Industrial Control Computer, 2016(3): 86-87. doi: 10.3969/j.issn.1001-182X.2016.03.039 刘金琨. 先进PID控制MATLAB仿真[M]. 北京: 电子工业出版社, 2011: 288-296. HE Y, JIN Y, HUANG L, et al. Quantitative analysis of COLREG rules and seamanship for autonomous collision avoidance at open sea[J]. Ocean Engineering, 2017, 140: 281-291. doi: 10.1016/j.oceaneng.2017.05.029 -

 下载:
下载:

 点击查看大图
点击查看大图
图(7) / 表(2)
计量
- 文章访问数: 991
- HTML全文浏览量: 621
- PDF下载量: 22
- 被引次数: 0