

Crack Detection of 3D Asphalt Pavement Based on Multi-feature Test
-
摘要: 针对由裂缝对比度低、路面纹理复杂多变等因素引起的沥青路面三维图像的裂缝检测精度低的问题,对原始三维裂缝图像进行尺寸降维、灰度校正、高斯滤波等预处理;然后以图像截面为研究对象,分别对4个方向的截面依次进行特别设计的倾斜度、高斯分布、边缘梯度3种特征检验,从而获得裂缝截面;接着对各个方向的裂缝截面进行融合和去噪,获得完整的裂缝二值图像;最后,根据路面粗糙度的高低,变化高斯分布特征检验中的相关参数,实现裂缝的高精度检测. 研究结果表明:提出的算法能达到89.19%的准确率、93.69%的召回率及91.06%的 F 值,优于基于三维光影、种子识别的典型三维图像裂缝检测方法.Abstract: In order to solve the accuracy problems in the crack detection of 3D asphalt pavement, which are mainly caused by low contrast between cracks and the surrounding area and complex pavement textures, a three-step preprocessing was conducted on original 3D images firstly, including size reducing, intensity correction and Gaussian smoothing. Then, three predominant feature tests of tilt-level, Gaussian-distribution and edge-gradient were applied to the image profiles of four directions successively so as to obtain the crack profiles. Moreover, the crack profiles of four directions were merged and denoised to acquire the intact cracks. Finally, according to the roughness of pavement surface, a related parameter in the Gaussian-distribution test was adjusted to realize the crack detection of high accuracy. The experiment result indicates that the proposed algorithm can reach 89.19% of accuracy, 93.69% of recall and 91.06% of F-measure, which outperforms another two typical 3D recognition algorithms based on the theories of 3D shadowing and crack seeds.
-
Key words:
- road engineering /
- detection algorithm /
- image processing /
- pavement cracking /
- multi-feature /
- 3D images
-
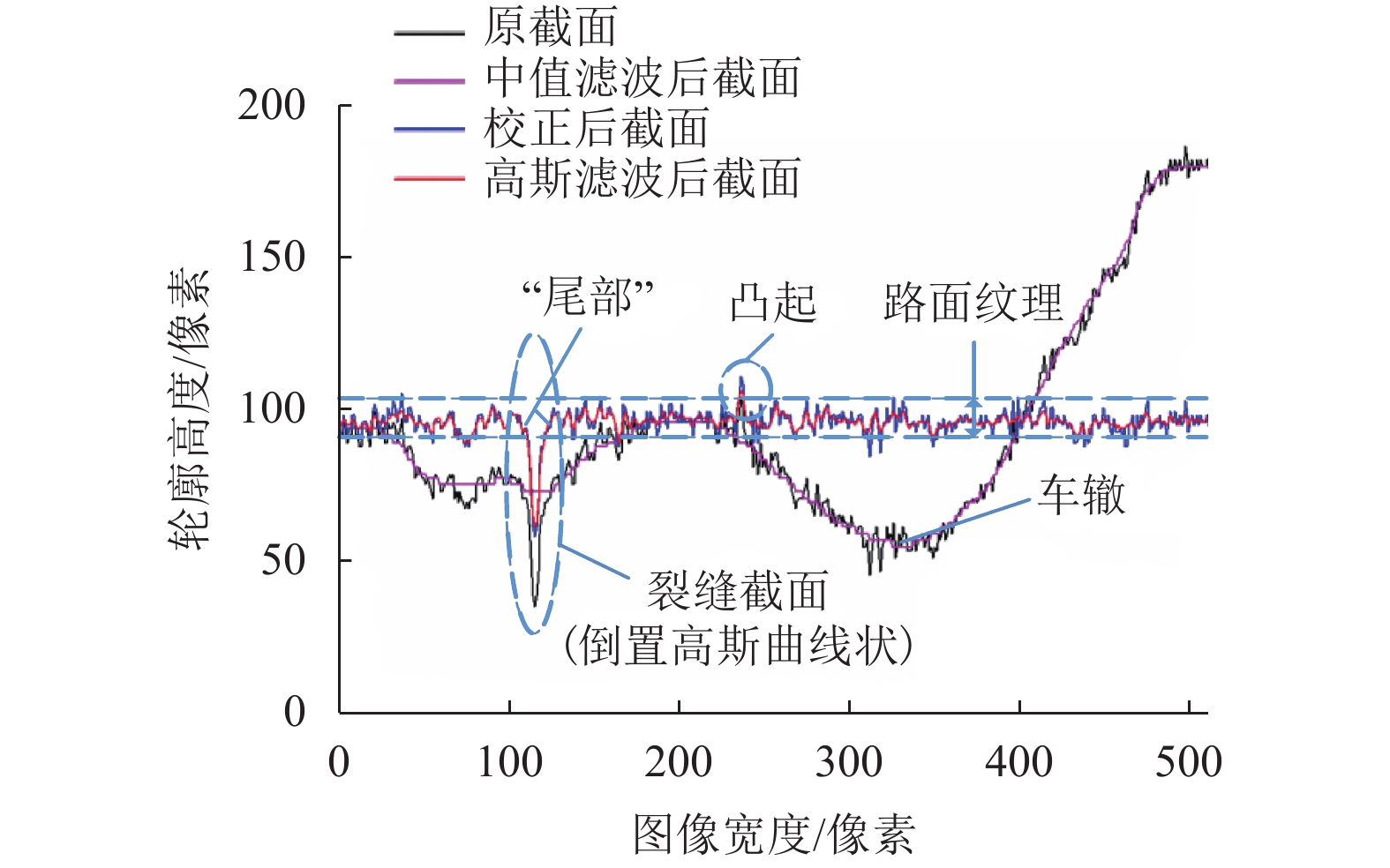
图 1 三维裂缝图像断面预处理实例
Figure 1. Illustration of a preprocessed profile in 3D asphalt pavement images

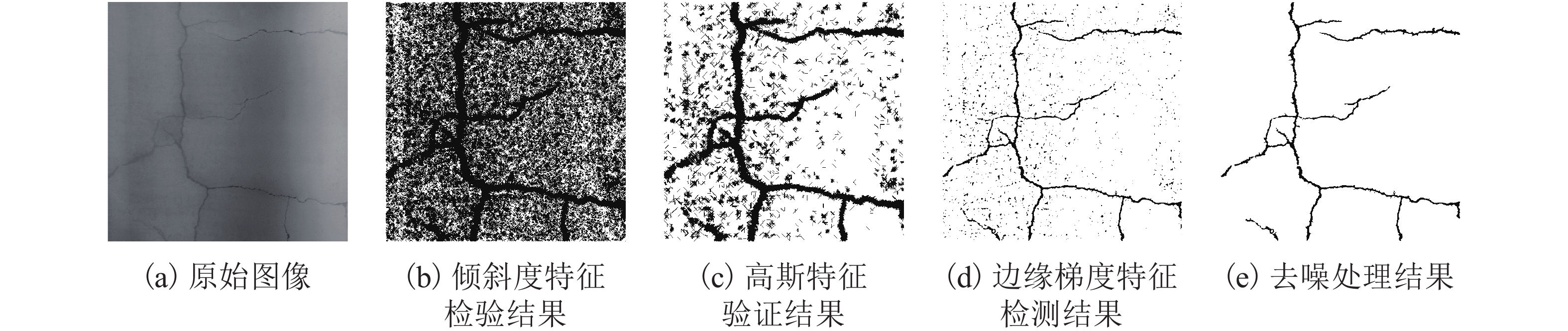
图 4 低粗糙度沥青路面裂缝检测结果对比
Figure 4. Comparison of crack detection using low textured asphalt pavement images
表 1 不同算法检测结果对比
Table 1. Comparison of crack detection using different methods
% 类型 图像编号 算法 A 算法 B 本文算法 准确率 召回率 F 值 准确率 召回率 F 值 准确率 召回率 F 值 低粗糙
度路面1~60 87.00 95.36 90.17 99.49 79.91 87.98 94.46 96.00 95.13 61~120 86.04 93.75 88.96 98.97 78.13 86.93 91.28 95.42 93.16 121~180 88.05 93.80 90.27 90.74 93.78 92.08 89.82 95.19 92.25 1~180 87.03 94.30 89.80 96.40 83.94 89.00 91.85 95.54 93.51 高粗糙
度路面181~240 54.34 94.65 66.90 93.42 88.63 90.68 89.61 92.30 90.68 241~300 48.59 94.97 62.33 93.06 88.06 90.37 87.98 91.20 89.27 301~360 55.68 90.48 65.86 90.42 71.62 78.71 81.97 92.00 85.88 181~360 52.87 93.37 65.03 92.30 82.77 86.59 86.52 91.83 88.61 汇总 1~360 69.95 93.84 77.42 94.35 83.36 87.80 89.19 93.69 91.06  下载: 导出CSV
下载: 导出CSV
表 2 低粗糙程度沥青路面裂缝检测结果对比
Table 2. Comparison of crack detection using low textured asphalt pavement images
原始图象 人工批注 算法 A 算法 B 本文算法 
 下载: 导出CSV
下载: 导出CSV
表 3 高粗糙程度沥青路面裂缝检测结果对比
Table 3. Comparison of crack detection using high textured asphalt pavement images
原始图象 人工批注 算法 A 算法 B 本文算法 
 下载: 导出CSV
下载: 导出CSV
-
WANG K C P. Design and implementations of automated systems for pavement surface distress survey[J]. Journal of Infrastructure Systems, 2000, 6(1): 24-32. doi: 10.1061/(ASCE)1076-0342(2000)6:1(24) FUKUHARA T, TERADA K, NAGAO M, et al. Automatic pavement-distress-survey system[J]. Journal of Transportation Engineering, 1990, 116(3): 280-286. doi: 10.1061/(ASCE)0733-947X(1990)116:3(280) ZHANG P, LI H. Recognition of pavement surface crack[C]//Sixth International Conference on Natural Computation. Yantai: IEEE, 2010: 3393-3396. AYENU-PRAH A, ATTOH-OKINE N. Evaluating pavement cracks with bidimensional empirical mode decomposition[J]. Eurasip Journal on Advances in Signal Processing, 2008, 2008(1): 861701.1-861701.7 NGUYEN T S, AVILA M, BEGOT S. Automatic detection and classification of defect on road pavement using anisotropy measure[C]//Signal Processing Conference. Glasgow: IEEE, 2009: 617-621. 彭博,WANG K C P,陈成,等. 基于各向异性测度的路面三维图像裂缝识别[J]. 西南交通大学学报,2014,49(5): 888-895. doi: 10.3969/j.issn.0258-2724.2014.05.023PENG Bo, WANG K C P, CHEN Cheng, et al. 3D pavement crack image detection based on anisotropy measure[J]. Journal of Southwest Jiaotong University, 2014, 49(5): 888-895. doi: 10.3969/j.issn.0258-2724.2014.05.023 CHENG H D, SHI X J, GLAZIER C. Real-time image thresholding based on sample space reduction and interpolation approach[J]. Journal of Computing in Civil Engineering, 2003, 17(4): 264-272. doi: 10.1061/(ASCE)0887-3801(2003)17:4(264) 王世芳,车艳丽,李楠,等. 一种基于多尺度脊边缘的沥青路面裂缝检测算法[J]. 中国公路学报,2017,30(4): 32-41. doi: 10.3969/j.issn.1001-7372.2017.04.005WANG Shifang, CHE Yanli, LI Nan, et al. Asphalt pavement crack detection algorithm based on multi-scale ridges[J]. China Journal of Highway and Transport, 2017, 30(4): 32-41. doi: 10.3969/j.issn.1001-7372.2017.04.005 ZOU Qin, CAO Yu, LI Qingquan, et al. CrackTree:automatic crack detection from pavement images[J]. Pattern Recognition Letters, 2012, 33(3): 227-238. doi: 10.1016/j.patrec.2011.11.004 WANG K C P. Elements of automated survey of pavements and a 3D methodology[J]. Journal of Modern Transportation, 2011, 19(1): 51-57. doi: 10.1007/BF03325740 TSAI Y C J, LI F. Critical assessment of detecting asphalt pavement cracks under different lighting and low intensity contrast conditions using emerging 3D laser technology[J]. Journal of Transportation Engineering, 2012, 138(5): 649-656. doi: 10.1061/(ASCE)TE.1943-5436.0000353 OUYANG W, XU B. Pavement cracking measurements using 3D laser-scan images[J]. Measurement Science & Technology, 2013, 24(10): 105204.1-105204.9. SOLLAZZO G, WANG K C P, BOSURGI G, et al. Hybrid procedure for automated detection of cracking with 3D pavement data[J]. Journal of Computing in Civil Engineering, 2016, 30(6): 04016032.1-04016032.12. doi: 10.1061/(ASCE)CP.1943-5487.0000597 JIANG C, TSAI Y J. Enhanced crack segmentation algorithm using 3D pavement data[J]. Journal of Computing in Civil Engineering, 2016, 30(3): 04015050.1-04015050.10. doi: 10.1061/(ASCE)CP.1943-5487.0000526 ZHANG A, WANG K C P, LI B, et al. Automated pixel-level pavement crack detection on 3D asphalt sur-faces using a deep-learning network[J]. Computer-Aided Civil and Infrastructure Engineering, 2017, 32(10): 805-819. doi: 10.1111/mice.12297 彭博. 基于路面高精三维图像的裂缝自动识别与分类算法[D]. 成都: 西南交通大学, 2014. FUJITA Y, HAMAMOTO Y. A robust automatic crack detection method from noisy concrete surfaces[J]. Machine Vision and Applications, 2011, 22(2): 245-254. doi: 10.1007/s00138-009-0244-5 SHAPIRO S, WILK M B. An analysis of variance test for normality (complete samples)[J]. Biometrika, 1965, 52: 591-611. doi: 10.1093/biomet/52.3-4.591 GUPTA S D, PATTANAYAK A K. Intelligent image analysis (IIA) using artificial neural network (ANN) for non-invasive estimation of chlorophyll content in micropropagated plants of potato[J]. In Vitro Cellular & Developmental Biology−Plant, 2017(14): 1-7. 彭博,WANG K C P,陈成,等. 基于1 mm精度路面三维图像的裂缝种子自动识别算法[J]. 中国公路学报,2014,27(12): 23-32. doi: 10.3969/j.issn.1001-7372.2014.12.004PENG Bo, WANG K C P, CHEN Cheng, et al. Automatic recognition for crack seeds based on 1 mm resolution 3D pavement images[J]. China Journal of Highway and Transport, 2014, 27(12): 23-32. doi: 10.3969/j.issn.1001-7372.2014.12.004 ZHNAG A, WANG K C P, AI C. 3D shadow modeling for detection of descended patterns on 3D pavement surface[J]. Journal of Computing in Civil Engineering, 2017, 31(4): 04017019.1-04017019.13. doi: 10.1061/(ASCE)CP.1943-5487.0000661 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1004
- HTML全文浏览量: 462
- PDF下载量: 55
- 被引次数: 0