

Driver Behavior Response to Drowsiness Alarming at Different Levels
-
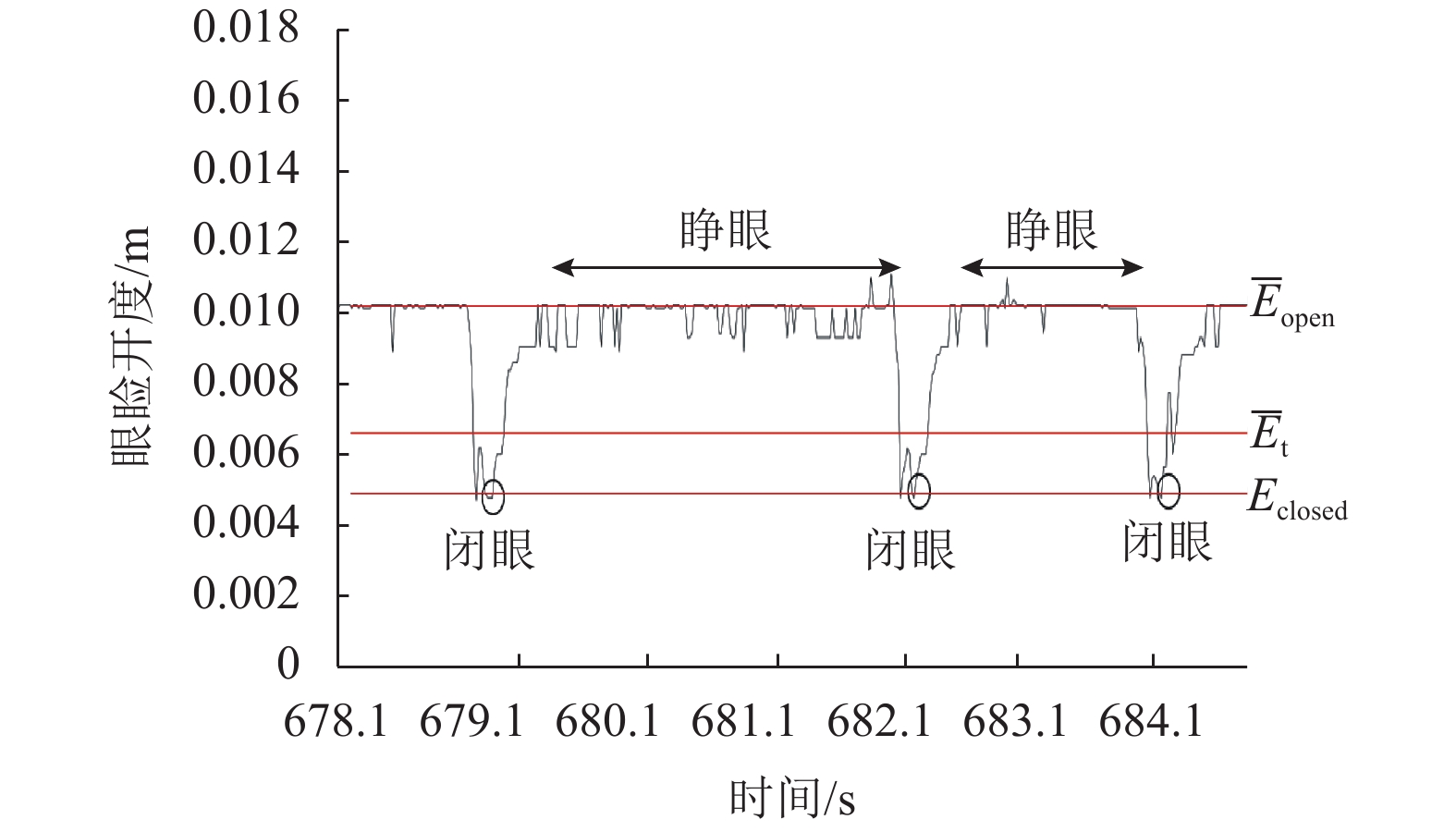
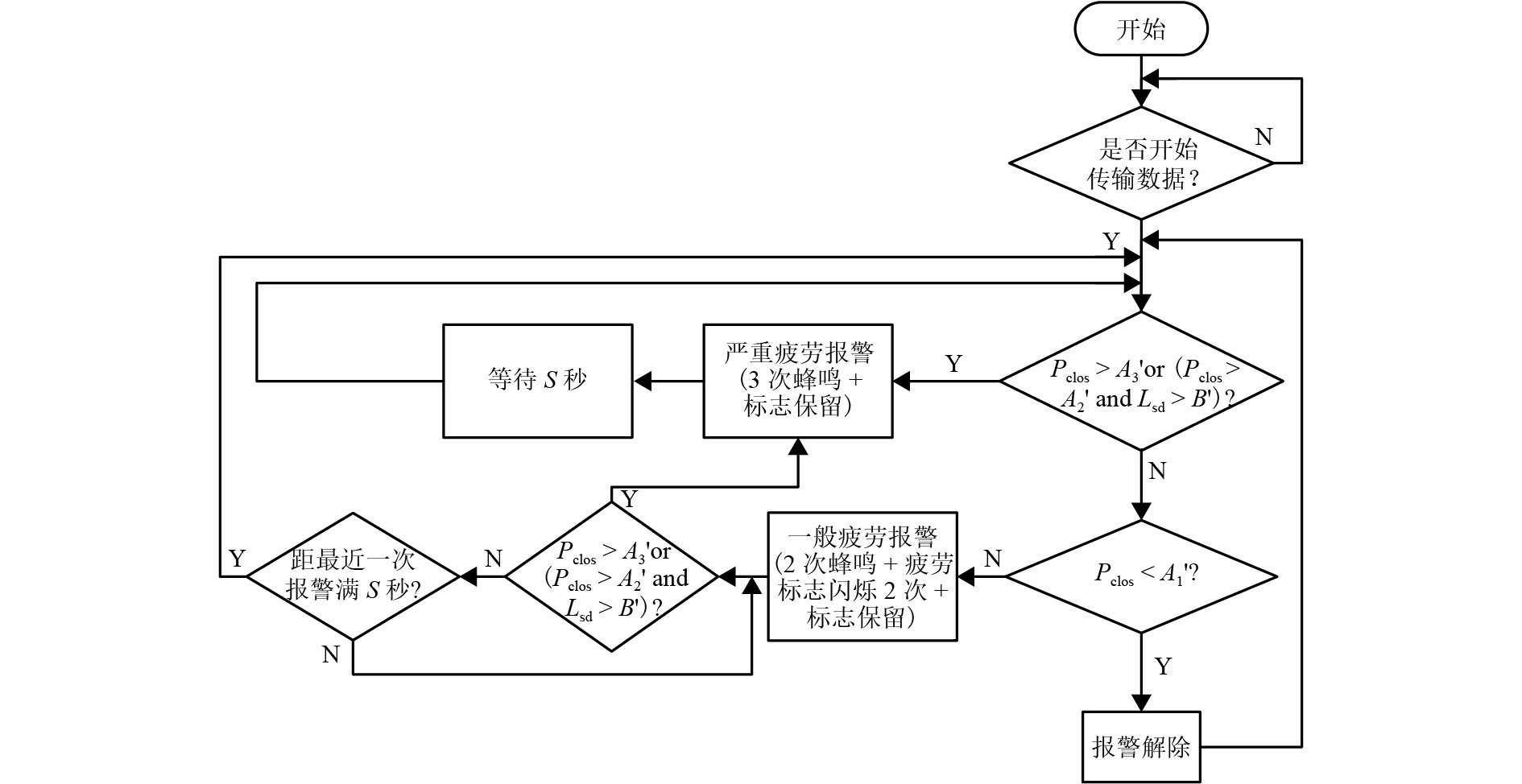
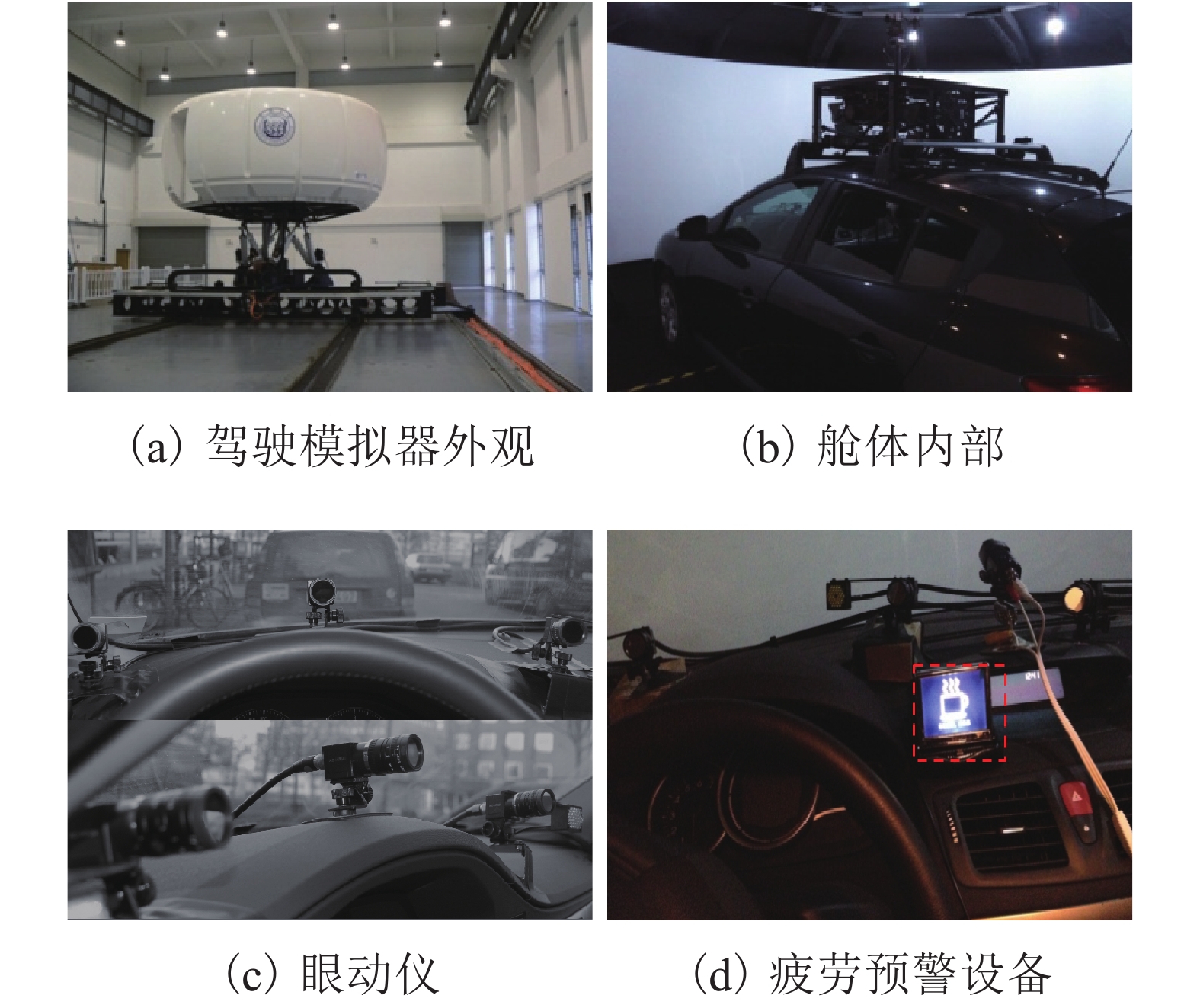
摘要: 确定疲劳预警提示时机是车载疲劳预警提示技术中的关键和难点,通过驾驶员对预警提示的驾驶行为响应特征来判断提示时机的合理性是解决该问题的新思路. 通过开展在疲劳分级预警提示环境下的驾驶模拟试验,采集驾驶员眼动(眼闭合时间比例)和车道偏移(车道偏移标准差、车道偏移均值、车道越线面积)指标,并通过成对Wilcoxon signed-rank检验,分析不同等级预警提示前后15 s时间内关键驾驶行为指标的差异. 研究结果表明:在设定的疲劳分级规则下,一般疲劳预警提示后,车道偏移标准差均值显著下降0.129 1,车道越线面积均值显著下降8.574 4;在严重疲劳预警提示后,眼闭合时间比例显著下降0.044 9,但车道偏移标准差和车道越线面积均未发生显著改变,驾驶员应该尽快停车休息.Abstract: To identify the timing of drowsiness driving warning is the key issue and a bottleneck of onboard drowsiness driving warning technology. Finding a rationale for warning timing using driver’s driving behavior response feature is an innovation. Therefore, after conducting a driving simulator experiment under the influence of drowsiness alarming, eye movement index, the percentage of eyelid closure (PERCLOS), and vehicle lateral position indexes (standard deviation of lateral position, average of lateral position, area of line exceeding) were recorded. Then, the differences in driving behavior between the pre-warning and post-warning in 15 seconds for each warning were compared using the paired Wilcoxon signed-rank test. The results demonstrated that under the drowsiness classification criterion, after the normal level of drowsiness warning, the mean of the standard deviation of lateral position and the mean of the area of line exceeding significantly dropped down by 0.129 1 and 8.574 4 respectively; after the serious level of drowsiness warning, although the mean of PERCLOS decreased by 0.044 9, the standard deviation of the lateral position and area of line exceeding did not significantly change and that the driver should stop and rest immediately.
-
Key words:
- driving simulator /
- driving behavior /
- warning time /
- warning response /
- drowsiness driving
-
表 1 一般疲劳与严重疲劳预警前后的变量描述性统计指标汇总
Table 1. Descriptive statistics summary of normal and serious levels of drowsiness warning in before and after the warning period
报警类型 变量 均值 标准差 最小值 最大值 一般疲劳
N = 69Pclos_pre 0.174 5 0.115 6 0.015 6 0.574 4 Pclos_post 0.152 5 0.106 5 0 0.608 9 Mavg_pre 0.222 4 0.577 6 –2.331 9 1.480 8 Mavg_post 0.254 0 0.336 8 –0.618 5 0.946 4 Lsd_pre 0.457 0 0.320 1 0.106 1 2.020 4 Lsd_post 0.327 9 0.241 8 0.036 0 1.490 0 Darea_pre 11.714 4 34.631 3 0 224.340 9 Darea_post 3.140 0 10.091 8 0 60.062 8 严重疲劳
N = 96Pclos_pre 0.359 9 0.131 7 0.063 3 0.713 3 Pclos_post 0.315 0 0.142 7 0.062 2 0.757 8 Mavg_pre 0.172 5 0.537 7 –3.381 4 0.861 0 Mavg_post 0.191 4 0.399 3 –0.916 3 1.328 4 Lsd_pre 0.433 0 0.242 8 0.125 1 1.668 7 Lsd_post 0.488 7 0.826 4 0.091 7 8.138 6 Darea_pre 7.994 6 37.169 4 0 351.571 1 Darea_post 5.623 3 17.266 1 0 117.700 1  下载: 导出CSV
下载: 导出CSV
表 2 疲劳预警提示前后响应指标的Wilcoxon signed-rank配对检验
Table 2. Drowsiness alarming before and after the paired Wilcoxon signed-rank test of the responsive variables
报警类型 变量 均值 标准差 V值 P值 一般疲劳
N = 69Pclos_paired 0.022 0 0.096 5 1 448.5 0.150 4 Mavg_paired –0.031 6 0.544 7 1 187.0 0.904 8 L*sd_paired 0.129 1 0.313 6 1 879.0 0.000 1 D*area_paired 8.574 4 33.605 3 1 064.0 0.002 1 严重疲劳
N = 96P*clos_paired 0.044 9 0.138 6 3 153.5 0.000 1 Mavg_paired –0.018 9 0.560 8 2 383.0 0.842 1 Lsd_paired –0.055 7 0.811 5 2 644.0 0.248 9 Darea_paired 2.371 4 34.455 4 1 520.0 0.477 0 注:*表示该指标在提示前后存在显著差异.
下载: 导出CSV
-
国务院滨保高速天津" 10•7”特别重大交通事故调查组. 滨保高速天津" 10•7”特别重大交通事故调查报告[R]. 北京:中华人民共和国国务院, 2012 国务院包茂高速陕西延安" 8•26”特别重大道路交通事故调查组. 包茂高速延安" 8•26”特大道路交通事故调查报告[R]. 北京: 中华人民共和国国务院, 2013 国务院办公厅. 国务院关于加强道路交通安全工作的意见 [EB/OL].(2012-07-27) [2017-02-05]. http://www.gov.cn/zwgk/2012-07/27/content_2193042.htm 中华人民共和国工业和信息化部. 关于进一步提高大中型客货车安全技术性能加强车辆《公告》管理和注册登记管理工作的通知[EB/OL].(2011-12-31)[2017-02-05]. http://www.miit.gov.cn/n1146295/n1652858/n1652930/n3757018/c3757341/content.html 中华人民共和国交通运输部. 关于加强道路运输车辆动态监管工作的通知[EB/OL].(2011-03-19)[2017-02-05]. http://www.chinasafety.gov.cn/Contents/Channel_5330/2011/0413/128291/asset000010003301211_0_1302663969013.html G7智慧物联网公司. 中国物流大数据报告[EB/OL].(2017-01-13)[2017-02-05]. http://www.zqcn.com.cn/hongguan/201701/13/c491618.html WIERWILLE W, WREGGIT S, KIRN L, et al. Research on vehicle-based driver status/performance monitoring; development, validation, and refinement of algorithms for detection of driver drowsiness[R]. Washington D. C.: US National Hightway Traffic Safety Adiministration, 1994 HORREY J, NOY I, FOLKARD S, et al. Research needs and opportunities for reducing the adverse safety consequences of fatigue[J]. Accident Analysis & Prevention, 2011, 43(2): 591-594 王福旺,王宏. 长途客车驾驶员疲劳状态脑电特征分析[J]. 仪器仪表学报,2013,34(5): 1146-1152 doi: 10.3969/j.issn.0254-3087.2013.05.027WANG Fuwang, WANG Hong. EEG characteristic analysis of coach bus drivers in fatigue state[J]. Chinese Journal of Science Instrument, 2013, 34(5): 1146-1152 doi: 10.3969/j.issn.0254-3087.2013.05.027 程如中,赵勇,戴勇,等. 基于Adaboost方法的车载嵌入式疲劳驾驶预警系统[J]. 北京大学学报(自然科学版),2012,48(5): 719-726CHENG Ruzhong, ZHAO Yong, DAI Yong, et al. An on-board embedded driver fatigue warning system based on Adaboost method[J]. Acta Scientiarum Naturalium Universitatis Pekinensis, 2012, 48(5): 719-726 张希波,成波,冯睿嘉. 基于方向盘操作的驾驶人疲劳状态实时检测方法[J]. 清华大学学报(自然科学版),2010,50(7): 1072-1076ZHANG Xibo, CHENG Bo, FENG Ruijia. Real-time detection of driver drowsiness based on steering performance[J]. Journal of Tsinghua University (Science and Technology), 2010, 50(7): 1072-1076 谭小强. 基于DSP技术的疲劳驾驶预警系统中车道偏离识别方法的研究[D]. 西安: 长安大学, 2010 胥川,王雪松,陈小鸿. 无侵入测量指标的驾驶疲劳检测性能评估[J]. 西南交通大学学报,2014,49(4): 720-726 doi: 10.3969/j.issn.0258-2724.2014.04.025XU Chuan, WANG Xuesong, CHEN Xiaohong. Evaluating performance of non-intrusive indicators on drowsy driving detection[J]. Journal of Southwest Jiaotong University, 2014, 49(4): 720-726 doi: 10.3969/j.issn.0258-2724.2014.04.025 叶柠,孙宇舸. 基于EEG小波包子带能量比的疲劳驾驶检测方法[J]. 东北大学学报(自然科学版),2012,33(8): 1088-1092YE Ning, SUN Yuge. A fatigue driving detection method based on wavelet packet sub-band energy ratio of EEG[J]. Journal of Northeastern University (Natural Science), 2012, 33(8): 1088-1092 赵晓华,许士丽,茉建,等. 基于ROC曲线的驾驶疲劳脑电样本熵判定阈值研究[J]. 西南交通大学学报,2013,48(1): 178-183 doi: 10.3969/j.issn.0258-2724.2013.01.028ZHAO Xiaohua, XU Shili, RONG Jian, et al. Discriminating threshold of driving fatigue based on the electroencephalography sample entropy by receiver operating characteristic curve analysis[J]. Journal of Southwest Jiaotong University, 2013, 48(1): 178-183 doi: 10.3969/j.issn.0258-2724.2013.01.028 王连震,裴玉龙. 基于贝叶斯网络的驾驶疲劳程度识别模型[J]. 城市交通,2014,12(3): 66-74WANG Lianzhen, PEI Yulong. Driving fatigue recognition model based on bayesian network[J]. Urban Transport of China, 2014, 12(3): 66-74 李家文,成波. 驾驶人状态适应式疲劳预警方法的研究[J]. 汽车工程,2011,33(8): 694-700LI Jiawen, CHENG Bo. A study on the adaptive warning method for driving persons fatigue[J]. Automotive Engineering, 2011, 33(8): 694-700 胥川,王雪松,陈小鸿,等. 基于决策树的驾驶疲劳等级分析与判定[J]. 同济大学学报(自然科学版),2015,43(1): 75-81XU Chuan, WANG Xuesong, CHEN Xiaohong, et al. Driver drowsiness level analysis and prediction based on decision tree[J]. Journal of Tongji University (Natural Science), 2015, 43(1): 75-81 DINGES D F, GRACE R. PERCLOS: A valid psychophysiological measure of alertness as assessed by psychomotor vigilance[R]. Washington D. C.: US Federal Highway Administration, 1998 胥川. 疲劳驾驶行为特征及提示有效性研究[D]. 上海: 同济大学, 2014 肖献强,殷延杰,王家恩. 基于个体特性的驾驶行为操纵模式建模方法[J]. 中国机械工程,2016,27(19): 2681-2686,2692 doi: 10.3969/j.issn.1004-132X.2016.19.021XIAO Xianqiang, YIN Yanjie, WANG Jiaen. Driving behavior operation pattern modeling method based on individual characteristics[J]. China Mechanical Engineering, 2016, 27(19): 2681-2686,2692 doi: 10.3969/j.issn.1004-132X.2016.19.021 -

 下载:
下载:



 点击查看大图
点击查看大图
图(5) / 表(2)
计量
- 文章访问数: 811
- HTML全文浏览量: 387
- PDF下载量: 38
- 被引次数: 0