

Light-Duty Vehicles Driving Cycle Construction Based on Urban Roads
-
摘要: 为了制定标准车辆能耗规范和标定车辆排放,优化汽车使用性能,以呼和浩特市区道路上轻型汽车为研究对象,对轻型汽车行驶工况进行了分析. 首先通过中国汽车检测工况研究和开发(China automotive test cycle,CATC)专用数据采集设备,收集了74台车辆的行驶工况样本数据,数据采集覆盖所有时段类型、道路类型、轻型车类型和驾驶员类型;其次通过加权二次构建控制不同车辆类型的比例,采用主成分分析和聚类分析预处理数据,制定短行程规则;最后将运动学片段进行裁剪和特征值分类,构建了城市道路轻型汽车行驶工况. 研究结果表明:CATC平均速度为25.87 km/h,运行平均速度为33.92 km/h、匀速比例为20.59%,怠速比例为23.72%,加速比例为28.56%,减速比例为27.13%. 与欧盟提出的轻型车循环测试工况相对比,平均速度、运行平均速度、匀速比例低于欧洲工况,加速比例、减速比例、怠速比例高于欧洲工况.Abstract: In order to regulate vehicle energy consumption, calibrate vehicle emission and optimize vehicle performance, the driving cycles of light-duty vehicles on the urban roads of Hohhot is analyzed. Firstly, the 74 sample data of driving cycles were collected through special data acquisition equipments of CATC (China automotive test cycle). These samples cover tall types of roads, light-duty vehicles and drivers. Secondly, weights were assigned to different vehicles to set vehicle type proportion. The sample data are processed by principal component analysis and clustering analysis and the short segment rules are formulated. Finally the kinematic segments are clipped and their characteristics values are classified. Thus, the operating conditions of light-duty vehicles on urban roads are constructed. The results show that the average speed of CATC is 25.87 km/h, average running speed is 33.92 km/h, uniform speed ratio is 20.59%, idling ratio is 23.72%, acceleration ratio is 28.56% and deceleration ratio is 27.13%. Compared to the European Union (EU) cycle test condition, the average speed, average running speed and uniform speed ratio are lower than those of the EU standard, while the acceleration ratio, deceleration ratio and idling ratio are higher.
-
Key words:
- light-duty vehicles /
- driving cycle /
- short segment /
- urban transportation
-

图 3 城市道路轻型汽车行驶工况构建基本过程
Figure 3. Basic process of constructing the automobile driving cycle on urban roads
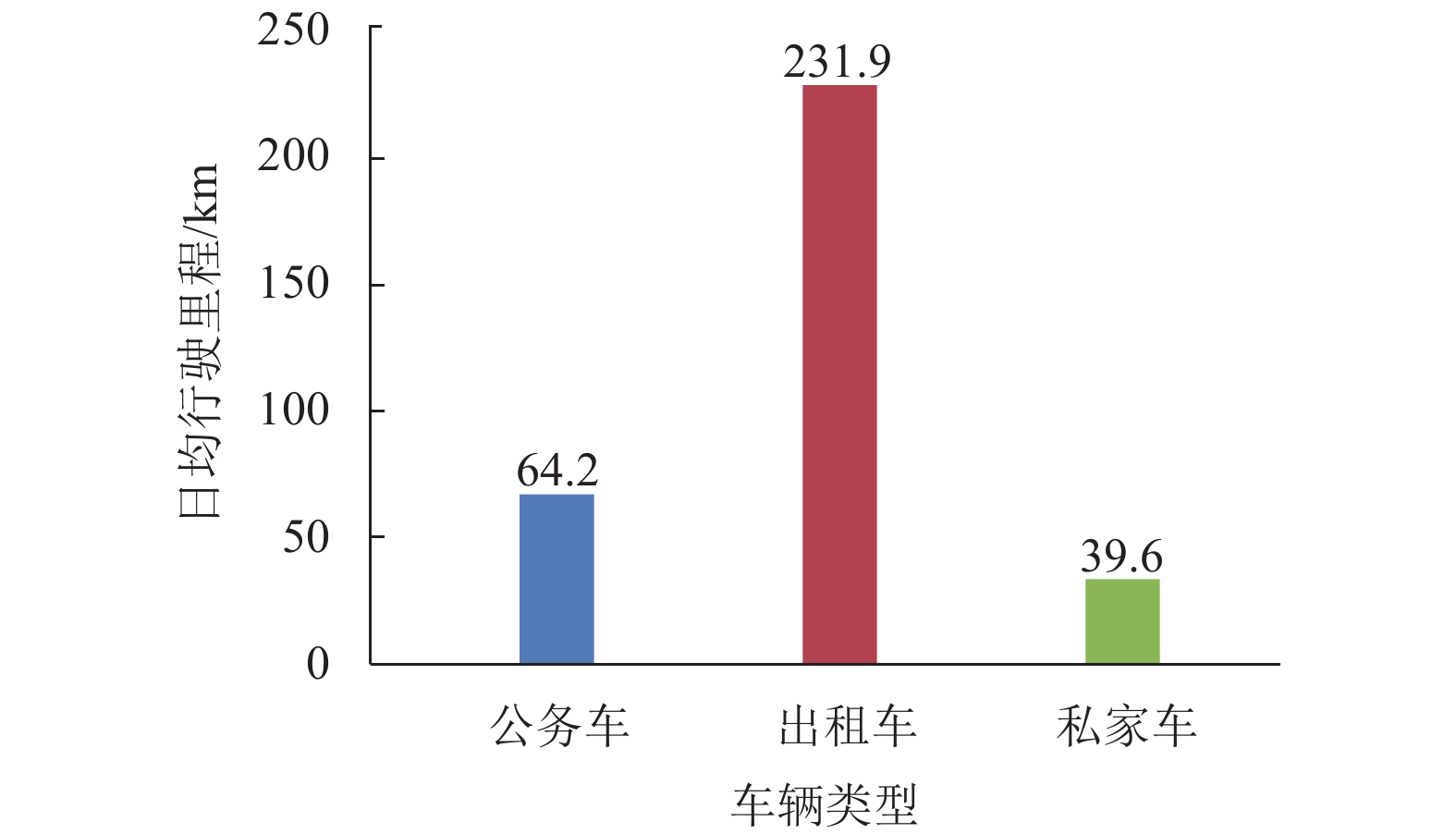
图 4 私家车、出租车、公务车出行特征分析
Figure 4. Travel feature analysis of private,taxi and financing vehicles
表 1 CATC信息化系统菜单功能
Table 1. Menu function of CATC information system
一级菜单 二级菜单 车辆监控 全屏地图检测
历史轨迹查询与下载
历史轨迹对比
实时数据查询数据管理 历史数据查询与下载
文件下载车辆与终端 车辆信息管理
终端管理
车辆与终端绑定
车辆与终端快速注册
SIM卡管理
SIM卡流量流水查询城市监控 全国城市监控
各城市监控详情
单车数据监控 下载: 导出CSV
下载: 导出CSV
表 2 部分数据格式要求
Table 2. Data format requirements
数据表示内容 数据类型 描述及要求 VIN STRING 识别码是识别的唯一标识,由 17 位字码构成,不足 17 位后补“\0”,例如车架号、产品条码、SIM卡号等 经度 DWORD 以度为单位的经度值 × 106,精确到百万分之一度 纬度 DWORD 以度为单位的纬度值 × 106,精确到百万分之一度 方向 WORD 0~360o,正北为 0,顺时针 速度 WORD 0~220 km/h,最小计量单元:0.1 km/h CAN 车速 WORD 0~220 km/h,最小计量单元:0.1 km/h,“0xFF,0xFE”表示异常,“0xFF,0xFF”表示无效 里程 DWORD GPS 车速积分累计里程,有效值范围 0~429 496 729.5 km,最小计量单元: 0.1 km 海拔 WORD 单位:m 电机转速 WORD 0~65 532 r/min(数值偏移量 20 000,有效转速 −20 000~45 532 r/min),最小计量单元:1 r/min,“0xFF,0xFE”表示默认值,“0xFF,0xFF”表示无效 档位 WORD 0 表示空档,1~6 分别表示 1~6 档,254 表示自动档,255 表示倒退档 电机负荷百分比 BYTE 0~100%,最小计量单元 1%,0xFE 表示默认值,0xFF 表示无效 发动机转速 WORD 0~65 532 r/min(数值偏移量 20 000,有效转速 −20 000~45 532 r/min),最小计量单元:1 r/min,“0xFF,0xFE” 表示异常,“0xFF,0xFF” 表示无效 发动机扭矩百分比 BYTE 0~100%,最小计量单元 1%, 0xFE 表示默认值,0xFF 表示无效 发动机负荷百分比 BYTE 0~100%,最小计量单元 1%, 0xFE 表示默认值,0xFF 表示无效效 电池电流 WORD 最小计量单元:0.05 A,偏移 −1 600 A,有效范围:−80~1 000 A 电池电压 WORD 最小计量单元:0.05 A,“0xFF,0xFE” 表示默认值,“0xFF,0xFF” 表示无效 空调 on/off BYTE 1 开,0 关,0xFE 表示默认值,0xFF 表示无效 环境温度 BYTE 0~250 ℃,最小计量单元 1 ℃(数值偏移量 50 表示 −50~200 ℃),0xFE 表示默认值,0xFF 表示无效 环境湿度 BYTE 0~100%,最小计量单元 1%,0xFE 表示默认值,0xFF 表示无效 大气压力 DWORD 单位 Pa 油门踏板开度 BYTE 有效范围:0~200 (表示 0~100%),最小计量单元 0.5%,“0xFE” 表示异常,“0xFF” 表示无效 空燃比 WORD 0~100,最小计量单元 0.01,“0xFF,0xFE” 表示默认值,“0xFF,0xFF” 表示无效 瞬时油耗 WORD 0~65 532 L,最小计量单元 0.01 L,“0xFF,0xFE” 表示默认值,“0xFF,0xFF” 表示无效
下载: 导出CSV
表 3 参数筛选前后的对比
Table 3. The parameters are compared before and after the screening
时间 筛选前怠
速比例/%筛选后怠
速比例/%筛选前平
均加速度/
(m•s−2)筛选后平
均加速度/
(m•s−2)筛选前平
均速度/
(km•h −1)筛选后平
均速度/
(km•h −1)筛选前平
均减速度/
(m•s−2)筛选后平
均减速度/
(m•s−2)2016 年 11 月 23.30 24.40 0.50 0.45 26.3 27.5 −0.55 −0.54 2016 年 12 月 24.50 25.20 0.40 0.36 24.6 23.6 −0.50 −0.53 2017 年 01 月 27.30 28.30 0.45 0.46 23.3 23.5 −0.56 −0.55 2017 年 02 月 25.60 24.50 0.48 0.47 25.5 24.3 −0.52 −0.53 2017 年 03 月 26.40 27.10 0.47 0.46 24.4 24.6 −0.51 −0.51 2017 年 04 月 24.10 23.80 0.42 0.45 25.9 24.5 −0.52 −0.53 2017 年 05 月 24.80 24.50 0.46 0.43 25.5 24.8 −0.54 −0.53 2017 年 06 月 25.00 24.90 0.49 0.45 25.3 25.0 −0.52 −0.52 2017 年 07 月 23.80 23.20 0.48 0.44 26.3 24.8 −0.53 −0.54 2017 年 08 月 23.20 23.50 0.45 0.46 25.4 24.8 −0.51 −0.53 2017 年 09 月 24.70 24.80 0.46 0.45 24.8 24.9 −0.52 −0.53 2017 年 10 月 23.40 23.50 0.48 0.46 26.5 26.3 −0.53 −0.52
下载: 导出CSV
表 4 各主成分贡献率及累计贡献率
Table 4. Contribution rate and cumulative contribution rate of each principal component
% 主成分 贡献率 累计贡献率 F1 45.900 000 45.900 000 F2 20.500 000 66.400 000 F3 13.800 000 80.200 000 F4 8.600 000 88.800 000 F5 5.300 000 94.100 000 F6 2.800 000 96.900 000 F7 1.400 000 98.300 000 F8 0.800 000 99.100 000 F9 0.600 000 99.700 000 F10 0.200 000 99.900 000 F11 0.090 000 99.980 000 F12 0.006 000 99.980 000 F13 0.000 900 99.989 000 F14 0.000 010 99.989 100 F15 0.000 008 99.989 170 F16 0.000 000 100.000 000
下载: 导出CSV
表 5 聚类分析迭代表
Table 5. Cluster analysis
聚类类别 迭代次数 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 类1 0.369 0.298 0.220 0.126 0.071 0.072 0.044 0.032 0.021 0.010 0 类2 4.235 0.296 0.196 0.135 0.056 0.055 0.033 0.024 0 类3 5.768 0.996 0.632 0.438 0.239 0.152 0.073 0.062 0.057 0.032 0.021 0.015 0.005 0.003 0
下载: 导出CSV
表 6 实际采集数据与典型法规工况比较
Table 6. Comparison of actual data and typical statutory conditions
工况 平均速度/(km•h−1) 运行平均速度/(km•h−1) 匀速比例% 怠速比例% 加速比例% 减速比例% 实际行驶工况 24.50 32.60 22.90 24.84 26.60 25.66 CATC 25.87 33.92 20.59 23.72 28.56 27.13 FTP75 33.89 40.93 24.65 17.20 31.10 27.05 WLTP 46.42 53.15 27.83 12.67 30.94 28.56 NEDC 33.34 43.48 37.54 22.63 23.22 16.61
下载: 导出CSV
表 7 不同城市轻型汽车行驶工况对比
Table 7. Comparison of driving conditions in different cities of China
参数 北京 上海 广州 深圳 呼和浩特 匀速比例/% 27.34 22.28 25.95 18.40 20.59 怠速比例/% 16.52 31.61 17.77 20.15 23.72 加速比例/% 25.29 22.83 29.11 32.30 28.56 减速比例/% 30.85 23.28 27.16 29.15 27.13 平均速度/(km•h−1) 19.98 14.96 14.14 32.39 25.87
下载: 导出CSV
-
孙强,白书战,韩尔樑,等. 基于试验测量的瞬时行驶工况构建[J]. 吉林大学学报(工学版),2015,45(2): 364-370.SUN Qiang, BAI Shuzhan, HAN Erliang, et al. Instantaneous driving cycle construction based no experimental measurement[J]. Journal of Jilin University (Engineering and Technology Edition), 2015, 45(2): 364-370. 杨正军. WLTP用于中国道路轻型车测试循环可行性研究[D]. 北京: 清华大学, 2014. BIELACZYC P, WOODBURN J, SZCZOTKA A. A comparison of carbon dioxide exhaust emissions and fuel consumption for vehicles tested over the NEDC, FTP-75 and WLTC chassis dynamometer test cycles[J]. SAE Technical Papers, 2015(1): 1065-1076. GALGAMUWA U, PERERA L, BANDARA S. Developing a general methodology for driving cycle construction: comparison of various established driving cycles in the world to propose a general approach[J]. Journal of Transportation Technologies, 2015, 5(4): 191-203. doi: 10.4236/jtts.2015.54018 MINGYUE M, BENEDIKT W, FERIT K, et al. A statistical method for driving cycle construction based on path geometry[C]//Proceedings of 2013 the International Conference on Remote Sensing, Environment and Transportation Engineering. Nanjing: Atlantis Press, 2013: 890-893. GAO X, ZHANG B, XIONG X, et al. Construction and analysis of the dalian driving cycle[J]. International Journal of Control & Automation, 2015, 8(6): 363-368. KNEZ M, MUNEER T, JEREB B, et al. The estimation of a driving cycle for Celje and a comparison to other European cities[J]. Sustainable Cities & Society, 2014, 11(2/3): 56-60. DIMARATOS A, TSOKOLIS D, FONTARAS G, et al. Comparative evaluation of the effect of various technologies on light-duty vehicle CO2, emissions over NEDC and WLTP[J]. Transportation Research Procedia, 2016, 14: 3169-3178. doi: 10.1016/j.trpro.2016.05.257 PREVEDOUROS P, MITROPOULOS L. Life cycle emissions and cost study of light duty vehicles[J]. Transportation Research Procedia, 2016, 15: 749-760. doi: 10.1016/j.trpro.2016.06.062 DEMUYNCK J, BOSTEELS D, PAEPE M D, et al. Recommendations for the new WLTP cycle based on an analysis of vehicle emission measurements on NEDC and CADC[J]. Energy Policy, 2012, 49(1): 234-242. 张宏,姚延钢,张露. 呼和浩特市轻型汽车运行工况构建研究[J]. 公路交通科技,2019,36(11): 104-110.ZHANG Hong, YAO Yangang, ZHANG Lu. Study on construction of light-duty vehicle driving cycle in Hohhot city[J]. Journal of Highway and Transportation Research and Development, 2019, 36(11): 104-110. 沈姝,田冬莲,杜常清,等. 国Ⅴ在用车实际道路下IUPR分布特征研究[J]. 汽车技术,2016(6): 45-48. doi: 10.3969/j.issn.1000-3703.2016.06.011SHEN Shu, TIAN Donglian, DU Changqing, et al. The research on IUPR distribution characteristic of China V vehicles based on the real road conditions[J]. Automobile Technology, 2016(6): 45-48. doi: 10.3969/j.issn.1000-3703.2016.06.011 路尧. 中国轻型汽车行驶工况开发[D]. 北京: 北京理工大学, 2016. 石琴,郑与波. 因子分析在汽车行驶工况构建过程中的应用[J]. 中国机械工程,2011(9): 1123-1127.SHI Qin, ZHENG Yubo. Application of factor analysis in driving cycle development[J]. China Mechanical Engineering, 2011(9): 1123-1127. 王中奇,关伟,毕军,等. 基于短时实际行驶工况的机动车微观排放模型[J]. 环境工程学报,2016(10): 5803-5807. doi: 10.12030/j.cjee.201505184WANG Zhongqi, GUAN Wei, BI Jun, et al. Microscopic emission model of motor vehicle based on short-time real driving cycle[J]. Chinese Journal of Environmental Engineering, 2016(10): 5803-5807. doi: 10.12030/j.cjee.201505184 杜常清,汪雨航,张佩. 基于GPS/GIS数据的短行程工况构建方法研究[J]. 武汉理工大学学报(交通科学与工程版),2016,40(5): 803-808.DU Changqing, WANG Yuhang, ZHANG Pei. Research on short trip driving cycle development based on GPS/GIS data[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2016, 40(5): 803-808. 秦大同,詹森,漆正刚,等. 基于K-均值聚类算法的行驶工况构建方法[J]. 吉林大学学报(工学版),2016,46(2): 383-389.QIN Datong, ZHAN Sen, QI Zhenggang, et al. Driving cycle construction using K-means clustering method[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(2): 383-389. 石琴,仇多洋,周洁瑜. 基于组合聚类法的行驶工况构建与精度分析[J]. 汽车工程,2012,34(4): 164-169.SHI Qin, CHOU Duoyang, ZHOU Jieyu. Driving cycle construction and accuracy analysis based on combined clustering technique[J]. Automotive Engineering, 2012, 34(4): 164-169. 胡志远,秦艳,谭丕强,等. 基于大样本的上海市乘用车行驶工况构建[J]. 同济大学学报(自然科学版),2015,43(10): 1523-1527. doi: 10.11908/j.issn.0253-374x.2015.10.011HU Zhiyuan, QIN Yan, TAN Piqiang, et al. Large sample based car driving cycle in Shanghai city[J]. Journal of Tongji University (Natural Science), 2015, 43(10): 1523-1527. doi: 10.11908/j.issn.0253-374x.2015.10.011 潘登. 混合动力汽车城市循环工况构建及运行工况多尺度预测[D]. 北京: 北京理工大学, 2015. 钟森鸣,黄坚,吴嘉健,等. 新能源汽车动态工况EMI测试系统构架设计与关键技术分析[J]. 中国测试,2017,43(8): 76-79.ZHONG Senming, HUANG Jian, WU Jiajian, et al. Frame design and key technical analysis of EMI test system for new energy vehicle dynamic condition[J]. China Measurement & Test, 2017, 43(8): 76-79. 徐小俊,李君,刘宇,等. 电动汽车城市行驶工况构建[J]. 科学技术与工程,2017,17(35): 330-336. doi: 10.3969/j.issn.1671-1815.2017.35.055XU Xiaojun, LI Jun, LIU Yu, et al. The development of electric vehicles urban driving cycle[J]. Science Technology and Engineering, 2017, 17(35): 330-336. doi: 10.3969/j.issn.1671-1815.2017.35.055 姚延钢. 城市道路轻型汽车运行工况构建[D]. 呼和浩特: 内蒙古大学, 2017. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 829
- HTML全文浏览量: 462
- PDF下载量: 41
- 被引次数: 0