

Algorithm Based on Cooperative Vehicle Infrastructure Systems
-
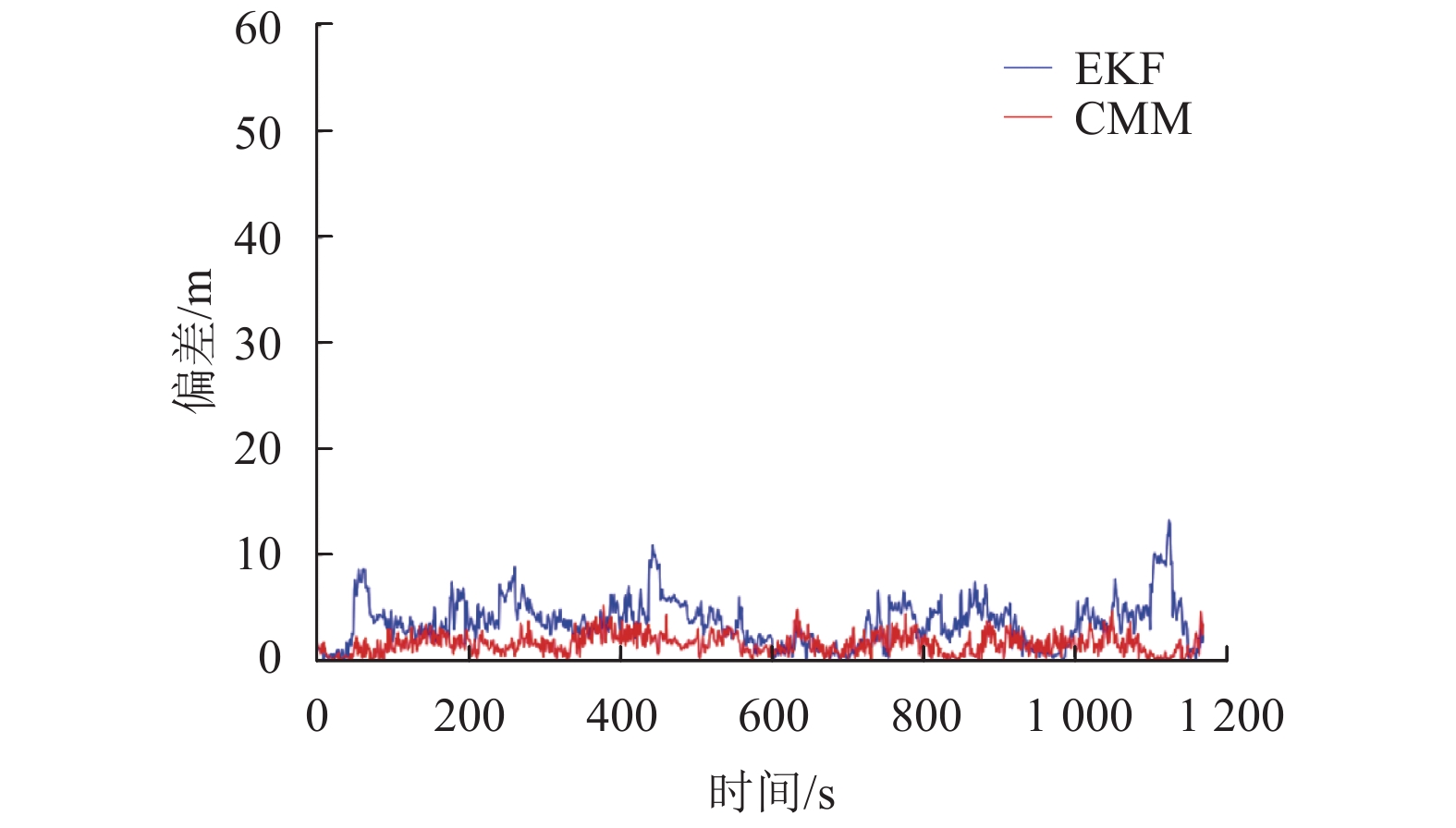
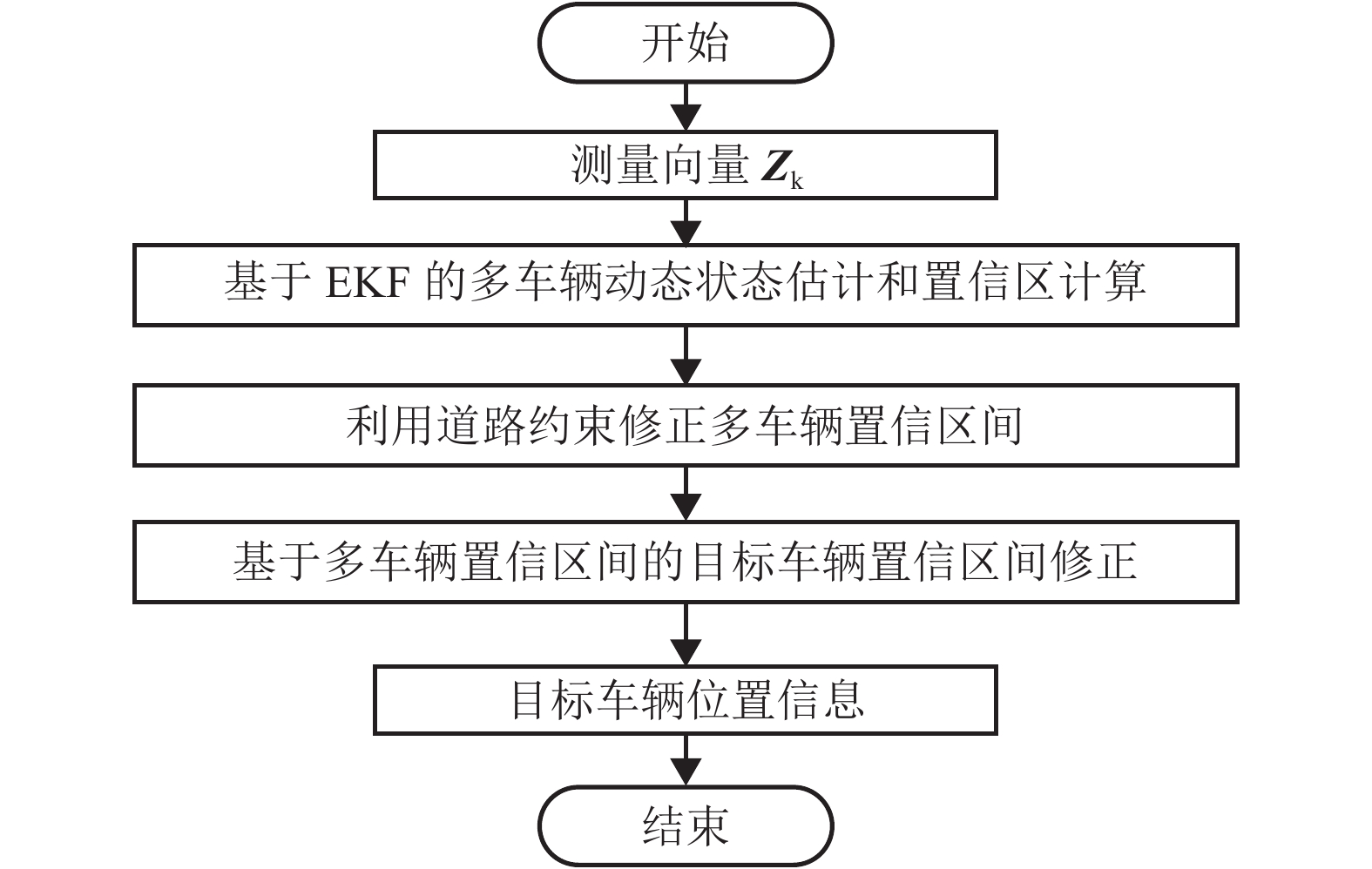
摘要: 为解决道路交叉口车辆由于定位信号缺失或者延迟引起的车辆定位偏差较大的问题,提出了基于车路协同的协同地图匹配算法(cooperative map-matching,CMM). 首先利用扩展Kalman滤波(extended Kalman filter,EKF)融合GPS与车载航位推算系统(vehicular dead reckoning,DR)信息作为协同地图匹配的预先定位;然后基于短程通讯技术实现车辆信息的交换与共享,在电子地图的基础上,利用道路约束实现车辆进一步定位. 为了验证算法的有效性,搭建了模拟真实场景的仿真环境进行实验. 研究结果表明:采用EKF融合GPS/DR数据的交叉口车辆定位平均偏差为9.09 m,相比GPS 的14.31 m,定位偏差减小30.87%;采用CMM算法的交叉口车辆,当参与CMM车辆数为7时,平均位置偏差为4.5 m,参与CMM车辆数为10辆时,平均位置偏差为2.75 m,相比EKF定位偏差减小69.74%.Abstract: In order to determine the problem of vehicle positioning deviation caused by a lack and delay of the positioning signal, a cooperative map-matching(CMM)algorithm, based on the cooperative vehicle infrastructure system, is proposed in this paper. First, the information obtained by GPS and that obtained by vehicular dead reckoning(DR)were fused to obtain the initial position of cooperative map-matching using an extended Kalman filter(EKF). Then, vehicle information was exchanged and shared based on dedicated short-range communication (DSRC). On the basis of an electronic map, the further positioning of vehicles was accomplished using road constraints. In order to verify the effectiveness of the proposed algorithm, an environment to simulate real scenes was set up to conduct the experiments. The experimental results demonstrate that the average positioning deviation of vehicles at intersections using EKF, which fuses data obtained from GPS and DR, is 9.90 m. The positioning deviation decreased by 30.87%, when compared with the average deviation of GPS, which is 14.31 m. The proposed CMM algorithm has an average position deviation of 4.5 m when the number of vehicles involved is 7, and 2.75 m when the number of vehicles involved is 10. The positioning deviation decreased by 69.74%.
-
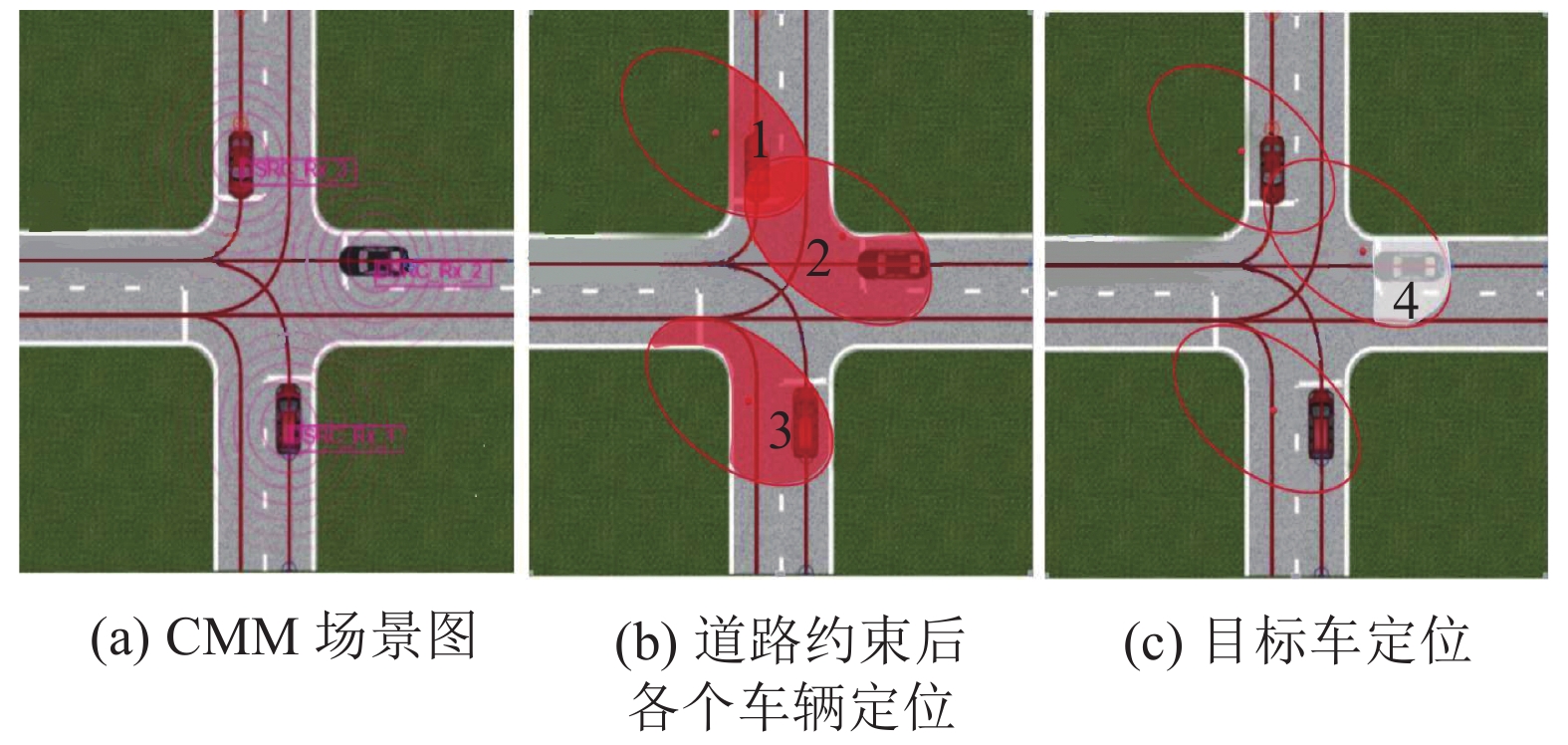
图 2 CMM算法示意图(右方车辆为目标车辆)
Figure 2. Schematic diagram of CMM(the right one is the target vehicle)
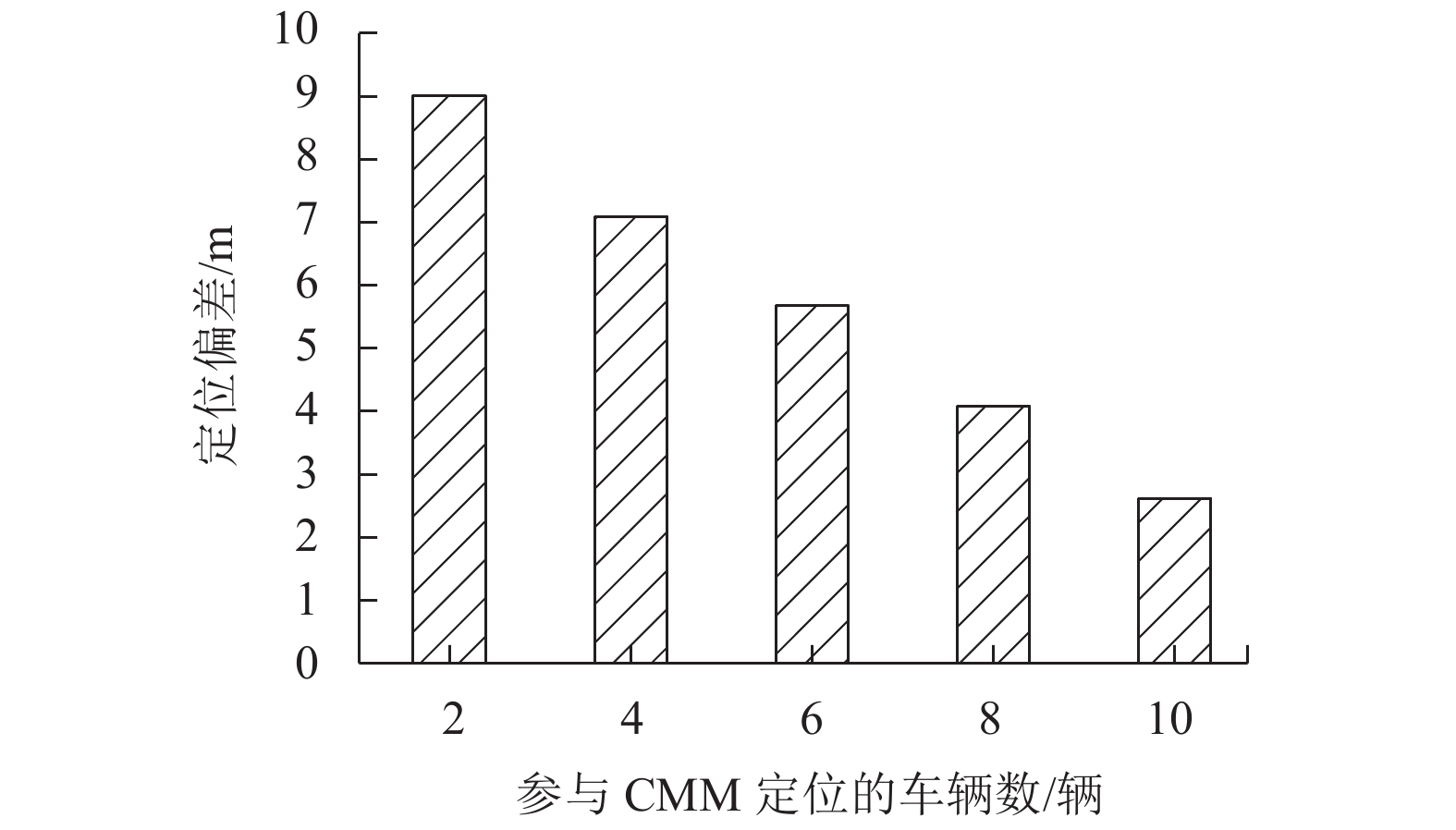
图 6 参与CMM的车辆数与定位平均偏差关系
Figure 6. Relationship between the number of vehicles in CMM and the average positioning deviation
表 1 观测点GPS与EKF偏差比较
Table 1. Comparison of deviation between GPS and EKF of observation points
定位方法 观测点 GPS 17.92 11.23 12.55 15.50 14.31 14.40 EKF 8.81 6.62 7.52 12.83 8.61 10.20  下载: 导出CSV
下载: 导出CSV
表 2 CMM与其它定位方法的位置偏差比较
Table 2. Comparison of position deviation between CMM and other positioning methods
GPS EKF 参与CMM算法的车辆数/辆 2 3 4 5 6 7 14.31 9.09 9.01 8.52 7.16 6.44 5.72 4.50
下载: 导出CSV
表 3 EKF定位偏差理论值与实测值
Table 3. Comparison of EKF positioning deviations theoretical and experimental
数值来源 理论估计值 8.85 6.65 6.52 12.70 8.65 10.28 实测值 8.81 6.62 6.91 12.83 8.61 10.20
下载: 导出CSV
-
HUANG Chungming, LIN Shihyang. Cooperative vehicle collision warning system using the vector-based approach with dedicated short range communication data transmission[J]. IET Intelligent Transport Systems, 2014, 8(2): 124-134 吴国锋. 蜂拥算法及其在协同自动驾驶中的应用[D]. 成都: 电子科技大学, 2015 VAN A B, VAN D C J G, VISSER R. The impact of cooperative adaptive cruise control on traffic-flow characteristics[J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(4): 429-436 STEVENS A, BRUSQUE C, KREMS J. Driver adaptation to information and assistance systems[M].London: the Institution of Engineering and Technology, 2014: 319-334 ROHANI M, GINGRAS D, GRUYER D. A novel approach for improved vehicular positioning using cooperative map matching and dynamic base station DGPS concept[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(1): 230-239 MILANES V, SHLADOVER S E, SPRING J, et al. Cooperative adaptive cruise control in real traffic situations[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(1): 296-305 LIU K, LIM H B, FRAZZOLI E, et al. Improving positioning accuracy using GPS pseudorange measurements for cooperative vehicular localization[J]. IEEE Transactions on Vehicular Technology, 2014, 63(6): 2544-2556 GOLESTAN K, SATTAR F, KARRAY F, et al. Localization in vehicular ad hoc networks using data fusion and V2V communication[J]. Computer Communications, 2015, 71(1): 61-72 YAO J, BALAEI A T, HASSAN M, et al. Improving cooperative positioning for vehicular networks[J]. IEEE Transactions on Vehicular Technology, 2011, 60(6): 2810-2823 ALAM N, KEALY A, DEMPSTER A G. An INS-aided tight integration approach for relative positioning enhancement in VANETs[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(4): 1992-1996 YAO Yiqing, XU Xiaosu, ZHU Chenchen, et al. A hybrid fusion algorithm for GPS/INS integration during GPS outages[J]. Measurement, 2017, 103(1): 42-51 徐宏宇,王浩,王尔申. 基于扩展卡尔曼滤波的GPS定位数据处理方法研究[J]. 科学技术与工程,2012,12(31): 8137-8142XU Hongyu, WANG Hao, WANG Ershen. Research of GPS positioning data processing based on extended kalman filtering[J]. Science Technology and Engineering, 2012, 12(31): 8137-8142 SELLOUM A, BETAILLE D, LE C E, et al. Lane level positioning using particle filtering[C]// 12th International IEEE conference on Intelligent Transportation Systems. St Louis: Institute of Electrical and Electronics Engineers Inc., 2009: 539-544 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 656
- HTML全文浏览量: 192
- PDF下载量: 73
- 被引次数: 0