

Complex Point Cloud Registration and Optimized Data Processing for High-Speed Railway Turnout
-
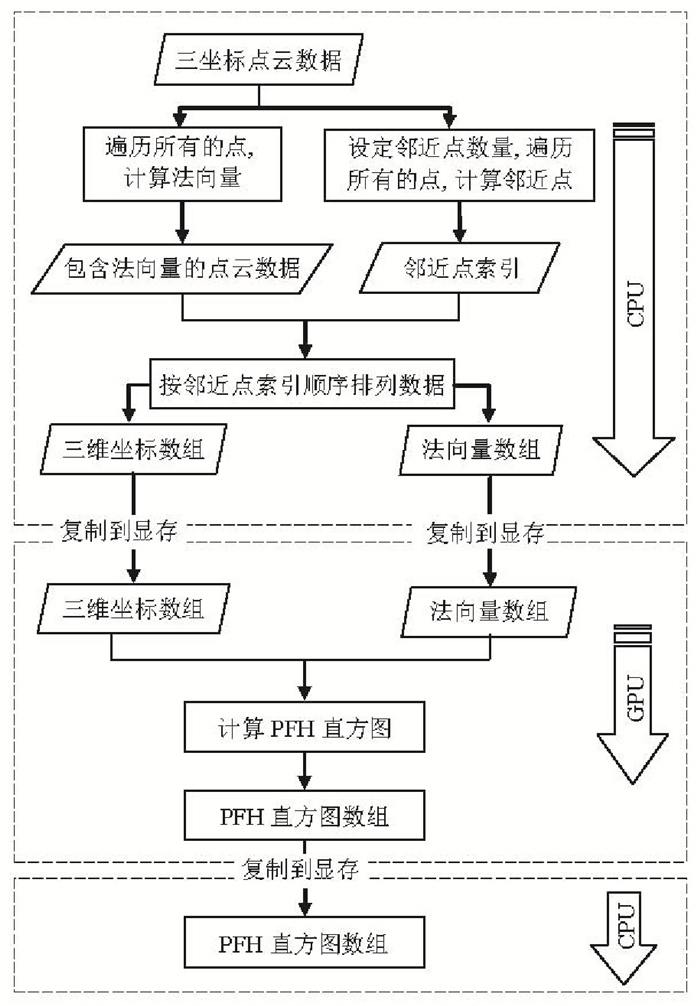
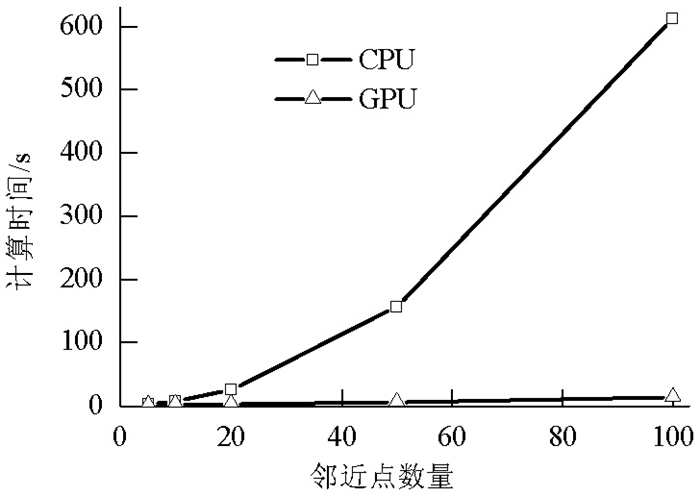
摘要: 为实现高速铁路尖轨磨耗的高效检测,结合高速尖轨的检测需求及其几何特征,提出了基于距离编码器的复合拼接方法.该方法将距离信息融合到点云拼接中,提高了检测系统的自动化程度.在计算点特征直方图(point feature histograms,PFH)的过程中,引入OpenCL(open computing language)异构加速模型调整点云的数据结构,发挥GPU的并行处理优势获得了更快的数据处理速度.利用实际尖轨开展磨耗检测实验,证明了针对高速尖轨的结构光检测系统有效可行.经过点云拼接和点云扫描数据处理的优化,系统的整体检测效率获得了70%左右的提升.Abstract: To enhance the inspection efficiency of high-speed switch rail wear, a complex registration based on a distance encoder is proposed, considering the inspection standards and the geometric characteristics of high-speed switch rail. The distance information was combined with the point cloud registration to improve automatic inspection. Additionally, the OpenCL (open computing language) heterogeneous acceleration model was introduced to achieve parallel data processing with higher speed during computation of the point feature histograms (PFH). In the on-site inspection of high-speed switch rail wear, the system function was verified on the structured light inspection platform, and the total inspection performance was increased by up to 70% by the optimized point cloud registration and data processing methods.
-
Key words:
- wear /
- 3D point cloud /
- registration /
- inspection /
- OpenCL
-
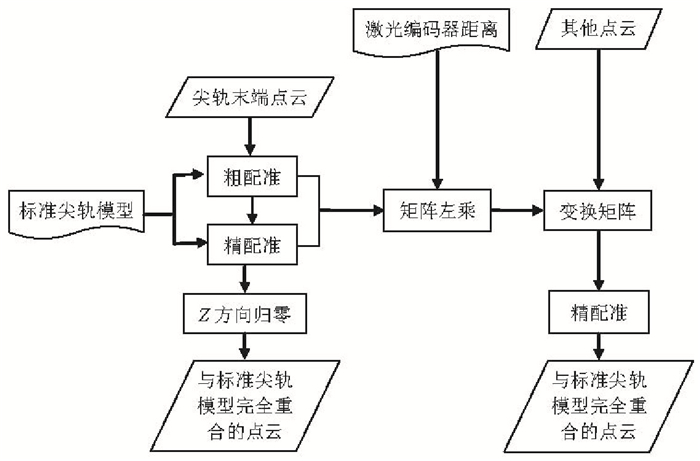
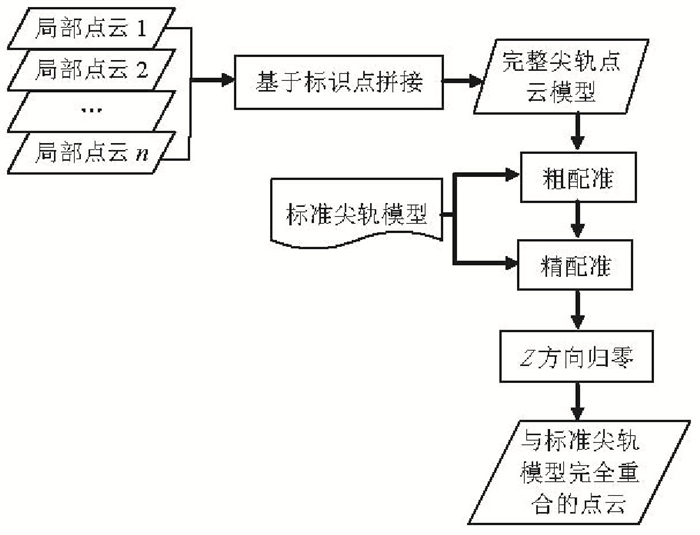
图 2 基于激光距离编码器复合拼接流程
Figure 2. Complex point cloud registration based on laser distance encoder
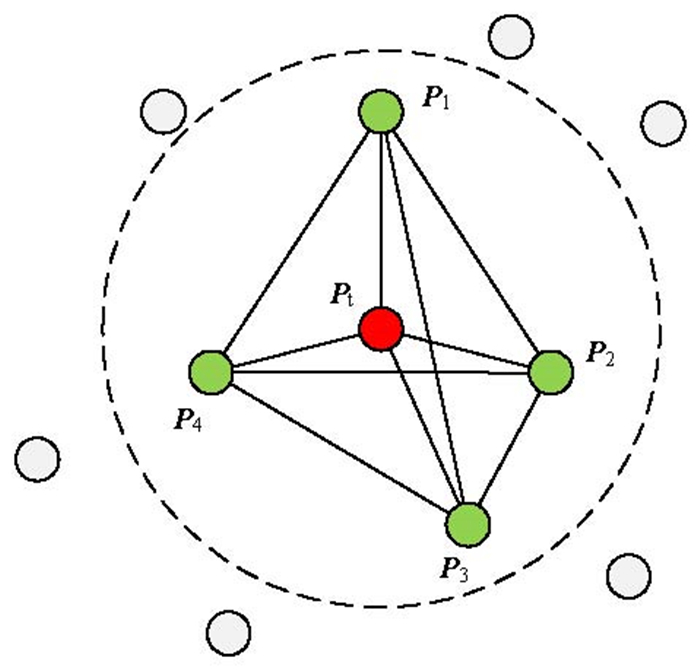
图 3 目标点与k个邻近点之间的几何特性
Figure 3. Geometric characteristic between query points and their nearest k neighbors
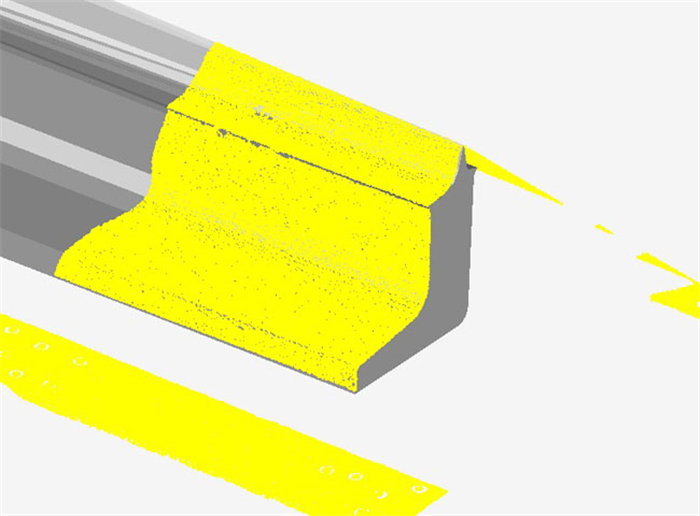
图 8 扫描的第一片尖端点云与高速尖轨标准模型尖端对齐
Figure 8. Registration of the first scanned piece of point cloud of the switch rail to the CAD model on the starting points
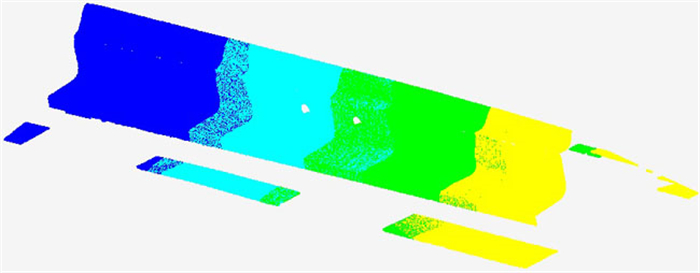
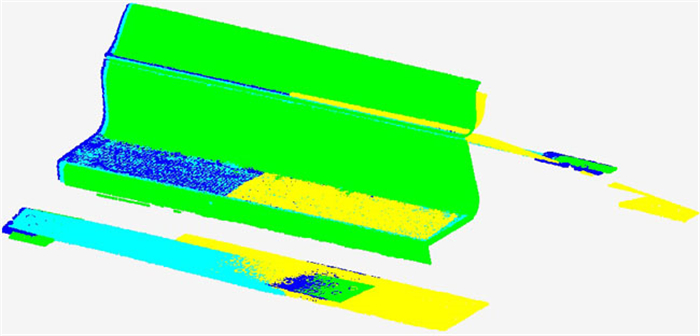
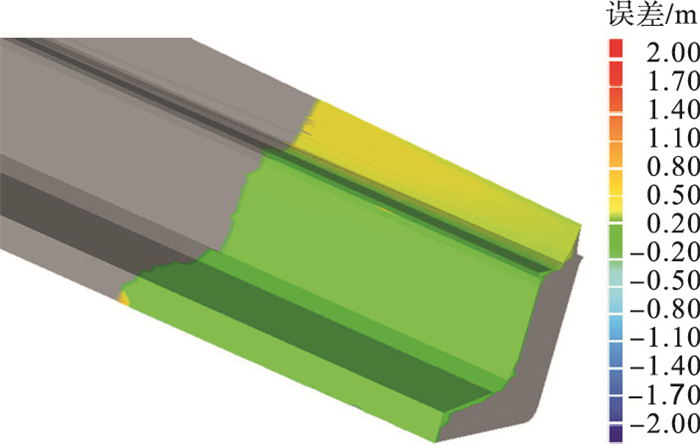
图 9 后续点云与标准模型精确配准结果
Figure 9. Accurate registration results of the rest point clouds to the designed model
表 1 匹配误差表
Table 1. Alignment errors
mm 点云序列 标识点拼接法 距离编码器拼接法 001 0.24 0.24 002 0.45 0.28 003 0.63 0.26 004 0.88 0.23  下载: 导出CSV
下载: 导出CSV
表 2 延伸方向误差表
Table 2. Errors along the switch rail
mm 点云序号 延伸方向误差 001 0 002 0.23 003 0.61 004 0.89
下载: 导出CSV
表 3 OpenCL平台配置表
Table 3. Hardware and software of the OpenCL platform
设备 型号 CPU AMD A8-7600B GPU RadeonTM R7(核心自带) 内存 8G×2ddr 31600(双通道) 操作系统 Windows 1064 bit 开发工具 Visual Studio 2015 PCL版本 1.7.2 64 bit
下载: 导出CSV
表 4 系统优化前后耗时对比
Table 4. Comparison of time consumption between original and optimized methods
s 对比项目 原方法 改进方法 系统标定 33.15 33.15 喷涂显影剂 34.06×4 34.06×4 粘贴标识点 30.00×3 0 清除标识点 10.00×3 0 扫描 6.45×4 6.45×4 点云预处理 5.00 5.00 PFH计算 50.00 6.41 粗匹配 10.41 10.41 精确匹配 4.65×4 4.65×4 总耗时 399.20 235.61 速度提升/% 69.43
下载: 导出CSV
-
王平, 陈嵘, 徐井芒, 等.高速铁路道岔系统理论与工程实践研究综述[J].西南交通大学学报, 2016, 51(2):357-372. doi: 10.3969/j.issn.0258-2724.2016.02.015WANG Ping, CHEN Rong, XU Jingmang, et al. Theories and engineering practices of high-speed railway turnout system:survey and review[J]. Journal of Southwest Jiaotong University, 2016, 51(2):357-372. doi: 10.3969/j.issn.0258-2724.2016.02.015 NIETO M, CORTS A, BARANDIARAN J, et al. Single camera railways track profile inspection using an slice sampling-based particle filter. computer vision, imaging and computer graphics. theory and application[M]. Berlin:Springer, 2012:326-339. 陈亮辉.采用结构光方法的三维轮廓测量[D].大连: 大连理工大学, 2006. http://cdmd.cnki.com.cn/Article/CDMD-10141-2006021219.htm ZHOU Y, ZHANG J, JIANG J, et al. Study and implementation on rail profile alignment algorithm based on 3D scanning data[C]//15th COTA international conference of transportation professionals. Reston: American Society of Civil Engineers, 2015: 1942-1951. 王健, 胥燕军, 汪力, 等.机器视觉在钢轨磨耗检测中的应用研究[J].铁道标准设计, 2014, 58(9):36-39. http://d.old.wanfangdata.com.cn/Periodical/tdbzsj201409009WANG Jian, XU Yanjun, WANG Li, et al. The application research of machine vision in rail wear detection[J]. Railway Standard Design, 2014, 58(9):36-39. http://d.old.wanfangdata.com.cn/Periodical/tdbzsj201409009 高伟杰.基于机器视觉的钢轨轮廓检测系统的研究[D].北京: 北京交通大学, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10004-1012355762.htm 张宇宁, 谢琦.一种基于机器视觉的铁路道岔检测方法[J].计算机应用与软件, 2015(1):225-228. doi: 10.3969/j.issn.1000-386x.2015.01.057ZHANG Yuning, XIE Qi. A railway turnout detection method based on machine vision[J]. Computer Applications and Software, 2015(1):225-228. doi: 10.3969/j.issn.1000-386x.2015.01.057 张广军.视觉测量[M].北京:科学出版社, 2008:175-205. 中华人民共和国铁道部.铁运[2006] 177号部令铁路线路维修规则[S].中国铁道出版社, 2006. 达飞鹏, 盖绍彦.光栅投影三维精密测量[M].北京:科学出版社, 2011:215-229. 袁宝军, 邹小魁.铁路道岔尖轨轨高的测量基准研究[J].铁道标准设计, 2013, 57(4):5-8. http://d.old.wanfangdata.com.cn/Periodical/tdbzsj201304002YUAN Baojun, ZOU Xiaokui. Study on measuring basis for height of railway turnout switch rail[J]. Railway Standard Design, 2013, 57(4):5-8. http://d.old.wanfangdata.com.cn/Periodical/tdbzsj201304002 朱德海.点云库PCL学习教程[M].北京:北京航空航天大学出版社, 2012:249-300. RUSU R B. Semantic 3D object maps for everyday manipulation in human living environments[J]. KüstlicheIntelligenz, 2010, 24(4):345-348. doi: 10.1007/s13218-010-0059-6 WAHL E, HILLENBRAND U, HIRZINGER G. Surflet-pair-relation histograms: a statistical 3D-shape representation for rapid classification[C]//International Conference on 3-D Digital Imaging and Modeling, 2003.[S.l.]: IEEE, 2003: 474-481. RUSUR B, BLODOW N, BEETZ M. Fast point feature histograms (FPFH) for 3D registration[C]//IEEE International Conference onRobotics and Automation.[S.l.]: IEEE, 2009: 3212-3217. MUNSHI A, GASTER B, MATTSON T G. OpenCL programming guide[M].[S.l.]: Science Press, 2012: 247-281. SCARPINO M. OpenCL in action:how to accelerate graphics and computation[M]. Shelter Island:Manning Publication, 2012:16-94. Advanced Micro Devices Inc. AMD OpenCL programming user guide[DB/OL].[2016-01-22]. http://amd-dev.wpengine.netdna-cdn.com/wordpress/media/2013/12/AMD_OpenCL_Programming_User_Guide2.pdf. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 525
- HTML全文浏览量: 223
- PDF下载量: 65
- 被引次数: 0