

Modelling Drivers' Lane-Changing Decision Behaviour Based on Social Force
-
摘要: 为建立更加简单的换道决策模型和考虑换道车辆和目标车道车辆间的相互作用,在换道效用和安全间隙选择的传统方法基础上,将社会力跟驰模型与换道模型相结合,提出了一种基于社会力的驾驶员主动换道决策行为模型.首先,以社会力模型中跟驰力作为各车道运行效用函数,构建换道目标车道选择效用模型;其次,考虑换道过程车辆纵向安全性,利用跟驰力搭建换道车辆和目标车道车辆间相互作用效用模型以对安全间隙选择进行约束;最后,对所建立的模型利用NGSIM(next generation simulation)数据和MATLAB遗传算法工具箱中genetic algorithm函数对多车道下驾驶员换道决策行为(不换道、向右换道、向左换道)进行标定和验证.研究结果表明:基于社会力的主动换道决策模型能够很好地识别出驾驶员的换道决策行为,最优参数在标定数据中对不换道、向右换道、向左换道的识别率分别达到了93.44%、93.14%和90.77%,验证数据中换道决策行为识别率分别达到了86.16%、80.00%和80.27%;标定和验证的单个识别率都在80.00%以上,整体识别率分别达到92.66%和83.28%.Abstract: In order to establish a simpler lane-changing decision-making model and consider the interaction between the lane-changing vehicle and the vehicles of the target lane, on the basis of the traditional methods of lane-changing utility and selection of safety gap, an initiative lane-changing decision-making model for drivers based on the social model by combining the social force following model with the lane-changing model was proposed. First, taking the following force in the social force model as the utility function of each driveway, a lane-changing decision-making utility model for the target lane selection was established. Second, considering the vehicle's longitudinal safety in the lane-changing process, the following force was used to build utility model of interaction between the lane-changing vehicle and the vehicles of the target lane to constrain the selection of safety gap. Finally, the proposed model was calibrated and validated by using next generation simulation (NGSIM) data and genetic algorithm function in MATLAB genetic algorithms toolbox for drivers' lane-changing decision-making behaviours (keeping following, changing to right lane, changing to left lane). The study results show that the lane-changing decision-making model based on social force could identify accurately the drivers'initiative lane-changing decision-making behaviour. The recognition rates of the optimal parameters in calibration data for drivers' lane-changing decision-making behaviours (keeping following, changing to right lane, changing to left lane) reached 93.44%, 93.14%, and 90.77%, respectively, and the recognition rates of the lane-changing decision-making behaviours in calibration data reached 86.16%, 80.00%, and 80.27%. Each recognition rate in calibration data and validation data was above 80.00%, and the overall recognition rates reached 92.66% and 83.28%, respectively.
-
Key words:
- highway transportation /
- lane-changing decision /
- social force /
- genetic algorithms /
- NGSIM data
-
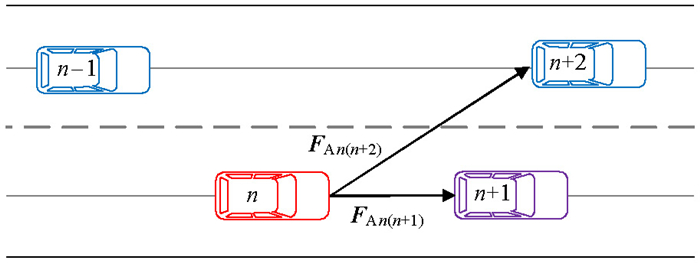
图 2 当前车道和目标车道前车的吸引力
Figure 2. Attraction force derived from the front vehicle in the current and the target lane
表 1 标定参数取值
Table 1. Value of calibration parameters
m/s2 参数 b0 b1 b3 b4 b5 b6 amax ΔF 取值范围 3~5 3~5 3~5 3~5 3~5 3~5 3~5 0~1  下载: 导出CSV
下载: 导出CSV
表 2 参数标定结果
Table 2. Results of the calibration parameters
m/s2 参数 b0 b1 b3 b4 b5 b6 amax Δ F 标定结果 3.749 4.652 3.961 3.088 3.030 4.996 3.807 0.426
下载: 导出CSV
表 3 换道决策模型标定和验证识别结果
Table 3. Results of calibration and validation of lane-changing decision models
% 评价 识别率 不换道 向右换道 向左换道 整体 标定 93.44 93.14 90.77 92.66 验证 86.16 80.00 80.27 83.28
下载: 导出CSV
-
TOLEDO T, KOUTSOPOULOS H N, BEN KIVA M. Integrated driving behavior modeling[J]. Transportation Research Part C:Emerging Technologies, 2007, 15(2):96-112. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ021166618/ WEI H, LEE J, LI Q, et al. Observation-based lane-vehicle assignment hierarchy:microscopic simulation on urban street network[J]. Transportation Research Record:Journal of the Transportation Research Board, 2000, 17(10):96-103. YUNLONG Z, OWEN L E, CLARK J E. A multi-regime approach for microscopic traffic simulation[J]. Transportation Research Record:Journal of the Transportation Research Board, 1998(1644):103-114. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=CC026043705 GIPPS P G. A model for the structure of lane-changing decisions[J]. Transportation Research Part B:Methodological, 1986, 20(5):403-414 doi: 10.1016/0191-2615(86)90012-3 YANG Q, KOUTSOPOULOS H N. A microscopic traffic simulator for evaluation of dynamic traffic management systems[J]. Transportation Research Part C:Emerging Technologies, 1996, 4(3):113-129. doi: 10.1016/S0968-090X(96)00006-X AHMED K I. Modeling drivers' acceleration and lane changing behavior[D]. Cambridge: Massachusetts Institute of Technology, 1999. HALATI A, LIEU H, WALKER S. CORSIM-corridor traffic simulation model[C]//Traffic Congestion and Traffic Safety in the 21st Century: Challenges, Innovations, and Opportunities. Chicago: American Society of Civil Engineers, 1997: 570-576. KITA H. A merging-giveway interaction model of cars in a merging section:a game theoretic analysis[J]. Transportation Research Part A:Policy and Practice, 1999, 33(3):305-312. http://www.sciencedirect.com/science/article/pii/S0965856498000391 KESTING A, TREIBER M, HELBING D. General lane-changing model MOBIL for car-following models[J]. Transportation Research Record:Journal of the Transportation Research Board, 2007, 1999(1):86-94. http://www.tandfonline.com/servlet/linkout?suffix=CIT0023&dbid=16&doi=10.1080%2F21680566.2016.1142401&key=10.3141%2F1999-10 李迎峰, 史忠科, 周致纳.微观交通仿真中随机决策换道行为研究[J].系统仿真学报, 2008, 20(16):4273-4277. http://d.old.wanfangdata.com.cn/Periodical/xtfzxb200816016LI Yingfeng, SHI Zhongke, ZHOU Zhina. Study on stochastic decision model of lane changing in microscopic traffic simulation[J]. Journal of System Simulation, 2008, 20(16):4273-4277. http://d.old.wanfangdata.com.cn/Periodical/xtfzxb200816016 HELBING D, TILCH B. Generalized force model of traffic dynamics[J]. Physical Review E, 1998, 58(1):133. doi: 10.1103/PhysRevE.58.133 HUANG W, FELLENDORF M, SCH NAUER R. Social Force based Vehicle Model for 2-dimensional Spaces[C]//91st Annual Meeting of the Transportation Research Board. Washington D. C.: Transportation Research Board, 2011: 1347. HUYNH D N, BOLTZE M, VU A T. Modelling mixed traffic flow at signalized intersectionUsing social force model[J]. Journal of the Eastern Asia Society for Transportation Studies, 2013, 10(17):34-49. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=J-STAGE_1450739 ANVARI B, DAAMEN W, KNOOP V L, et al. Shared space modeling based on social forces and distance potential field[M]. Switzerland:Springer International Publishing, 2014:907-916. ANVARI B, BELL M G, SIVAKUMAR A, et al. Modelling shared space users via rule-based social force model[J]. Transportation Research Part C:Emerging Technologies, 2015, 51:83-103. doi: 10.1016/j.trc.2014.10.012 PASCUCCI F, RINKE N, SCHIERMEYER C, et al. Modeling of shared space with multi-modal traffic using a multi-layer social force approach[J]. Transportation Research Procedia, 2015, 10(3)16-26. http://www.sciencedirect.com/science/article/pii/S2352146515002689 陈大飞.基于社会力的城市道路混合交通流建模与分析[D].长沙: 中南大学, 2011. 邱小平, 孙若晓, 马丽娜, 等.基于社会力的信号交叉口施工区交通流建模[J].交通运输系统工程与信息, 2015, 16(1):99-104. http://d.old.wanfangdata.com.cn/Periodical/jtysxtgcyxx201601016QIU Xiaoping, SUN Ruoxiao, MA Lina, et al. Modeling and analyzing of traffic flow on the work zone of urban signalized intersection based on social force[J]. Journal of Transportation System Engineering and Information Technology, 2015, 16(1):99-104. http://d.old.wanfangdata.com.cn/Periodical/jtysxtgcyxx201601016 GIPPS P G. A behavioural car-following model for computer simulation[J]. Transportation Research Part B:Methodological, 1981, 15(2):105-11. doi: 10.1016/0191-2615(81)90037-0 刘卫铮.基于大车混入率的交通流状态安全性研究[D].天津: 河北工业大学, 2007. 曲大义, 李娟, 刘聪, 等.基于分层Logit模型的车辆换道行为研究[J].科学技术与工程, 2017, 17(5):307-311. doi: 10.3969/j.issn.1671-1815.2017.05.054QU Dayi, LI Juan, LIU Cong, et al. Study on vehicles lane-changing behavior based on nested logit model[J]. Science Technology and Engineering, 2017, 17(5):307-311. doi: 10.3969/j.issn.1671-1815.2017.05.054 于丹.基于元胞自动机的小汽车-卡车异质交通流特性研究[D].成都: 西南交通大学, 2016. JULIER S, UHLMANN J, DURRANT WHYTE H F. A new method for the nonlinear transformation of means and covariances in filters and estimators[J]. IEEE Transactions on Automatic Control, 2000, 45(3):477-482. doi: 10.1109/9.847726 PUNZO V, SIMONELLI F. Analysis and comparison of microscopic traffic flow models with real traffic microscopic data[J]. Transportation Research Record:Journal of the Transportation Research Board, 2005, 19(34):53-63. http://www.onacademic.com/detail/journal_1000040486941310_a281.html RAKHA H, PECKER C, CYBIS H. Calibration procedure for Gipps car-following model[J]. Transportation Research Record:Journal of the Transportation Research Board, 2007, 1999(1):115-127. doi: 10.3141/1999-13 杨达, 蒲云, 祝俪菱, 等.改进的基于安全距离的车辆跟驰模型[J].北京工业大学学报, 2013, 39(9):1335-1342. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=SciencePaper201311200000001913YANG Da, PU Yun, ZHU Liling, et al. Improved safe distance car-following model[J]. Journal of Beijing University of Technology, 2013, 39(9):1335-1342. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=SciencePaper201311200000001913 -

 下载:
下载:

 点击查看大图
点击查看大图
图(4) / 表(3)
计量
- 文章访问数: 488
- HTML全文浏览量: 324
- PDF下载量: 158
- 被引次数: 0