

Experimental Study on Lateral Resistance of Optimized Ⅲc Sleeper with Different Frame Types
-
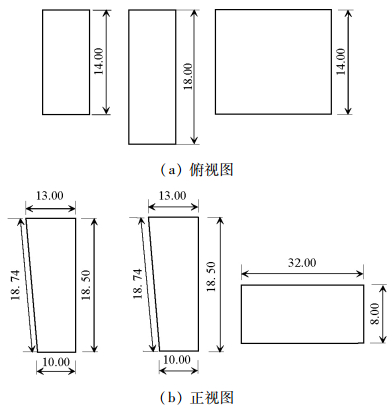
摘要: 为对标准Ⅲc型轨枕进行外形优化及揭示轨枕优化前后道床横向阻力特性,针对Ⅲc型轨枕特定部位增设混凝土加宽(加厚)块,形成3种框架式轨枕,结合道床横向阻力测试实验,分析对比不同道床断面形式下(砟肩宽度300 mm堆高0 m;砟肩宽度500 mm堆高0 m;砟肩宽度500 mm堆高150 m)各框架轨枕与标准Ⅲc型轨枕道床横向阻力数值.研究结果表明:在不同道床断面型式下,各型框架轨枕均能有效增大道床横向阻力,相较于标准Ⅲc型轨枕,A型框架轨枕(轨枕承轨台双翼缘型)可提升道床横向阻力37.8%~50.8%,B型框架轨枕(枕中截面十字型)可提升道床横向阻力25.5%~41.0%,C型框架轨枕(轨枕承轨台下底部加厚型)可提升道床横向阻力13.3%~23.0%.Abstract: To optimize the geometry of the Ⅲc mono-block sleeper and reveal the variation characteristics of the ballast bed lateral resistance before and after optimization, three different frame sleepers were designed and fabricated by adding concrete blocks to specific parts of the Ⅲc mono-block sleeper. Based on the ballast bed lateral resistance test, The frame sleepers and Ⅲc mono-block sleeper were compared for different ballast bed cross-sections (shoulder width 300 mm, shoulder height 0 mm; shoulder width 500 mm, shoulder height 0 mm; shoulder width 500 mm, and shoulder height 150 mm). The study shows that each frame sleeper can effectively increase lateral resistance with different ballast bed cross-sections. Furthermore, compared with the Ⅲc mono-block sleeper, there is 37.8%-50.0% increase in lateral resistance for frame sleeper type A(end-winged sleeper), 25.5%-41.0% increase for frame sleeper type B(middle-winged sleeper), and 13.3%-23.0% increase for frame sleeper type C(bumped sleeper).
-
Key words:
- lateral resistance /
- frame sleeper /
- section dimension
-

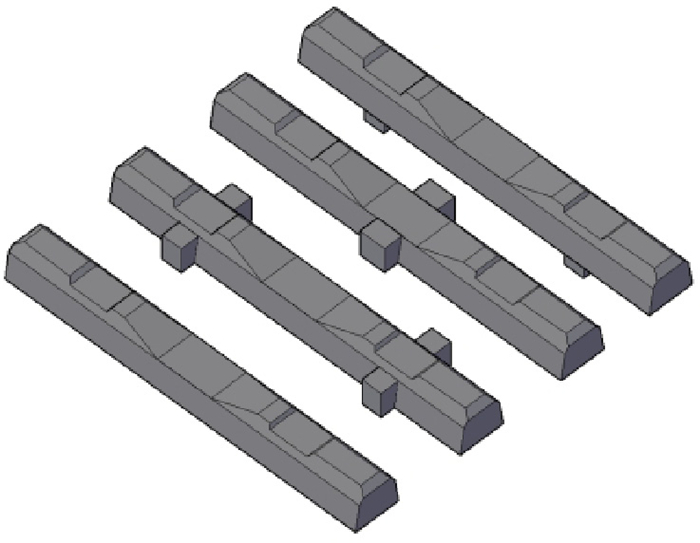
图 4 框架轨枕(从左至右依次为A、B、C型)
Figure 4. Pictures of frame sleepers (A、B、C from left to right)
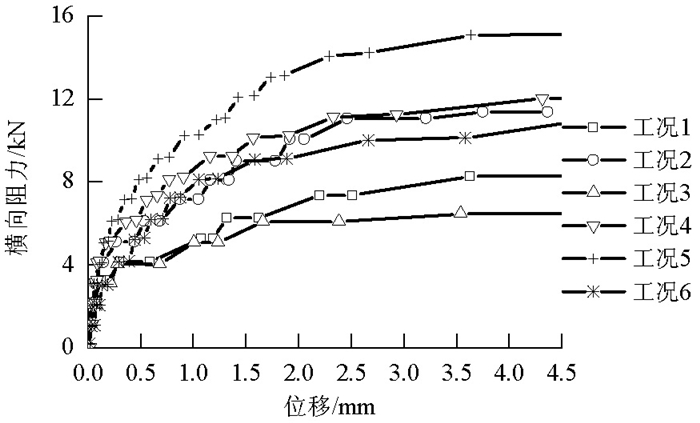
图 6 标准Ⅲc、A型轨枕横向阻力-位移
Figure 6. Resistance-displacement of Ⅲc sleeper and A frame sleeper
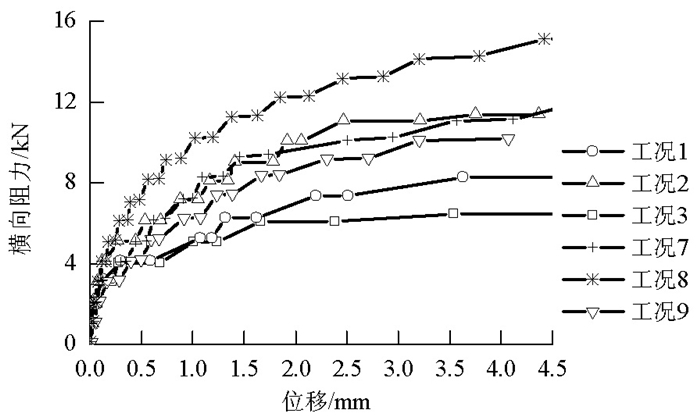
图 7 标准Ⅲc、B型轨枕横向阻力-位移
Figure 7. Resistance-displacement of Ⅲc sleeper and B frame sleeper
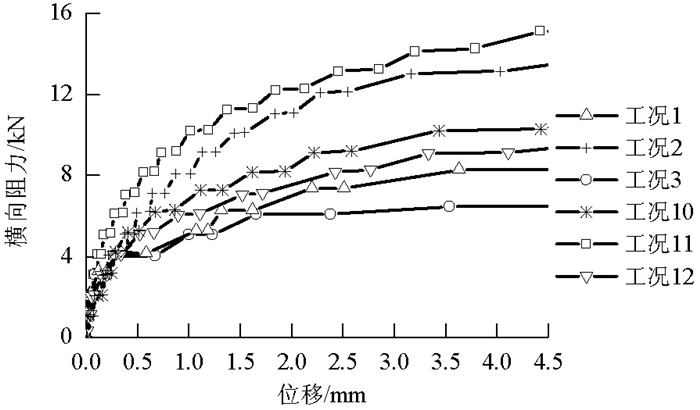
图 8 标准Ⅲc、C型轨枕横向阻力-位移
Figure 8. Resistance-displacement of Ⅲc sleeper and C frame sleeper
表 1 试验工况
Table 1. Test condition
mm 工况 轨枕类型 砟肩宽度 砟肩堆高 1 标准Ⅲc型 500 0 2 标准Ⅲc型 500 150 3 标准Ⅲc型 300 0 4 A框架轨枕 500 0 5 A框架轨枕 500 150 6 A框架轨枕 300 0 7 B框架轨枕 500 0 8 B框架轨枕 500 150 9 B框架轨枕 300 0 10 C框架轨枕 500 0 11 C框架轨枕 500 150 12 C框架轨枕 300 0  下载: 导出CSV
下载: 导出CSV
-
井国庆.铁路有砟道床[M].中国:中国铁道出版社, 2012:158-163. 杨艳丽. Ⅲ型混凝土轨枕有砟道床纵横向阻力设计参数试验研究[J].铁道工程学报, 2010(10):49-51, 57. doi: 10.3969/j.issn.1006-2106.2010.10.011YANG Yanli. Experimental study on design parameters of longitudinal and lateral resistance of ballast bed for Ⅲ-type concrete sleeper[J]. Journal of Railway Engineering Society, 2010(10):49-51, 57. doi: 10.3969/j.issn.1006-2106.2010.10.011 高亮, 罗奇, 徐旸, 等.道床断面尺寸对道床横向阻力的影响[J].西南交通大学学报, 2014, 49(6):954-960. doi: 10.3969/j.issn.0258-2724.2014.06.004GAO Liang, LUO Qi, XU Yang, et al. Effects of ballast bed section dimension on its lateral resistance[J]. Journal of Southwest Jiaotong University, 2014, 49(6):954-960. doi: 10.3969/j.issn.0258-2724.2014.06.004 KABO E. A numerical study of the lateral ballast resistance in railway tracks[J]. Proceedings of the Institution of Mechanical Engineers, Part F:Journal of Rail and Rapid Transit, 2006, 220(4):425-433. doi: 10.1243/0954409JRRT61 JING G Q, LUO Q, WANG Z J. Micro-analysis lateral ballast resistance of seismic characteristics[J]. Journal of Vibroengineering, 2014, 16(1):533-544. REMENNIKOV A, KAEWUNRUEN S. Experimental investigation on dynamic railway sleeper/ballast interaction[J]. Experimental Mechanics, 2006, 46(1):57-66. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=75622b631b76c151f639a5987ebdda7d TUTUMLUER E, HUANG H, HASHASH Y. Aggregate shape effects on ballast tamping and railroad track lateral stability[C]//AREMA Annual Conference. Loisville Kentucky: AREMA, 2006: 17-20. LEPEN L, BHANDARI A R, POWRIE W. Sleeper end resistance of ballasted railway tracks[J]. Journal of Geotechnical and Geoenvironmental Engineering, 2014, 140(5):04014004. doi: 10.1061/(ASCE)GT.1943-5606.0001088 ZAKERI J A, BAKHTIARY A. Comparing lateral resistance to different types of sleeper in ballasted railway tracks[J]. Scientia Iranica, 2014, 21(1):101-107. https://www.sid.ir/En/Journal/ViewPaper.aspx?ID=354659 LEPEN L. Track behaviour: the importance of the sleeper to ballast interface[D]. Southampton: University of Southampton, 2008. PROFILLIDIS V, PONIRIDIS P. The mechanical behaviour of the sleeper-ballast interface[J]. Computers & Structures, 1986, 24(3):437-441. http://www.sciencedirect.com/science/article/pii/0045794986903214 陈小平, 王平, 吕关仁.大型养路机械清筛和维修作业对道床阻力的影响[J].铁道标准设计, 2004, 47(4):90-92. doi: 10.3969/j.issn.1004-2954.2004.04.036 ZHOU T Y, HU B, XU P, et al. Numerical study on the evolution of force Chain inside railway ballast under tamping operation[J]. Applied Mechanics & Materials, 2015, 724:275-278. http://www.scientific.net/AMM.724.275 SADEGHI J M, BABAEE A. Structural optimization of B70 railway prestressed concrete sleepers[J]. Iranian Journal of Science & Technology Transaction B Engineering, 2006, 30(B4):461-473. https://www.sid.ir/en/journal/ViewPaper.aspx?FID=8542006b404 HAYANO K, KOIKE Y, NAKAMURA T, et al. Effects of sleeper shape on lateral resistance of railway ballasted tracks[J]. Geotechnical Special Publication, 2014, 65(240):491-499. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=CC0214516127 杜香刚.重载铁路新型高稳定性预应力混凝土轨枕的研发[J].铁道建筑, 2016(3):113-117. doi: 10.3969/j.issn.1003-1995.2016.03.28DU Xianggang. Research and development of new-type prestressed concrete sleeper with high stability for heavy haul railway[J]. Railway Engineering, 2016(3):113-117. doi: 10.3969/j.issn.1003-1995.2016.03.28 凌烈鹏, 冯毅杰, 李家林.异型玻璃钢轨枕的设计及应用[J].铁道建筑, 2012(7):112-114. doi: 10.3969/j.issn.1003-1995.2012.07-34LING Liepeng, FENG Yijie, LI Jialin. Design and application of shaped FRP sleeper[J]. Railway Engineering, 2012(7):112-114. doi: 10.3969/j.issn.1003-1995.2012.07-34 AWAD Z K, YUSAF T. Fibre composite railway sleeper design by using FE approach and optimization techniques[J]. Structural Engineering and Mechanics, 2012, 41(2):231-242. doi: 10.12989/sem.2012.41.2.231 HARRIS D K, LUTCH R H, AHLBORN T M, et al. Optimization of a prestressed concrete railroad crosstie for heavy-haul applications[J]. Journal of Transportation Engineering, 2010, 137(11):815-822. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=4d0a4322a58085c91d4aeba5e0f1f156 ZAKERI J A, MIRFATTAHI B, FAKHARI M. Lateral resistance of railway track with frictional sleepers[J]. Transport, 2012, 165(2):151-155. MONTALBÁN DOMINGO L, REAL HERRAIZ J I, ZAMORANO C, et al. Design of a new high lateral resistance sleeper and performance comparison with conventional sleepers in a curved railway track by means of finite element models[J]. Latin American Journal of Solids and Structures, 2014, 11(7):1238-1250. doi: 10.1590/S1679-78252014000700009 WOLF H E. Flexural behavior of prestressed concrete monoblock crossties[D]. Urbana: University of Illinois at Urbana-Champaign, 2015. LE PEN L M, POWRIE W. Contribution of base, crib, and shoulder ballast to the lateral sliding resistance of railway track:a geotechnical perspective[J]. Proceedings of the Institution of Mechanical Engineers, Part F:Journal of Rail and Rapid Transit, 2011, 225(2):113-128. doi: 10.1177/0954409710397094 LICHTBERGER B. The lateral resistance of the track (part 2)[J]. European Railway Review, 2007:1-7. 中华人民共和国铁道部.高速铁路有砟轨道线路维修规则(试行)[M].北京:中国铁道出版社, 2013:9-10. 高亮, 谷爱军.道床阻力测试方法的新探讨[J].北方交通大学学报, 1999, 23(4):91-95. http://d.old.wanfangdata.com.cn/Periodical/bfjtdxxb199904022GAO Liang, GU Aijun. Discussion on the new testing method of ballast resistance[J]. Journal of Northern Jiaotong University, 1999, 23(4):91-95. http://d.old.wanfangdata.com.cn/Periodical/bfjtdxxb199904022 期刊类型引用(11)
1. 陈阵. 肩部缺砟对铁路有砟道床横向阻力的影响. 江西建材. 2025(03): 39-41 .  百度学术
百度学术2. 陈成,王威,芮瑞,李建峰,王晓壮,唐子桉. 装配式可调间距的X形抗滑动轨枕研究. 铁道标准设计. 2023(02): 49-54 . 百度学术3. 邵壮,孙井林,陈学振,刘郑琦. 新型臂展式轨枕和Ⅲc型轨枕横向阻力试验和仿真研究. 铁道勘察. 2022(05): 100-103+124 . 百度学术4. 井国庆,杜文博,付琪璋. 特殊功能轨枕种类及应用. 中国铁路. 2021(05): 98-102 . 百度学术5. 井国庆,杜文博,付琪璋. 基于轨枕结构的高速铁路飞砟防治措施探讨. 铁道建筑. 2021(07): 113-116 . 百度学术6. 陈成,唐子桉,芮瑞,张磊,朱尘轩. 传统轨枕与新型X轨枕下道床劣化及动力特性研究. 北京交通大学学报. 2021(06): 117-124 . 百度学术7. 井国庆,宋佳宁,强伟乐,付豪,白健. 复合轨枕道床横向阻力试验及优化分析. 铁道标准设计. 2020(08): 27-33 . 百度学术8. 宋佳宁,庞玲,强伟乐,井国庆. 复合轨枕道床横向阻力增强方法. 铁道建筑. 2020(09): 117-122 . 百度学术9. 井国庆,杜文博,邓雯婧,付琪璋. 超高速有砟道床运营影响分析与解决措施. 中国铁路. 2020(10): 99-104 . 百度学术10. 井国庆,杜文博,丁东,汲生成. 基于风洞试验和CFD仿真的350km/h高速铁路飞砟研究. 中南大学学报(自然科学版). 2020(12): 3546-3553 . 百度学术11. 徐锡江,井国庆,籍雅萌. 超高速铁路飞砟防治技术研究. 现代交通技术. 2019(02): 76-80 . 百度学术其他类型引用(11)
-

 下载:
下载:
 百度学术
百度学术
 点击查看大图
点击查看大图

计量
- 文章访问数: 545
- HTML全文浏览量: 316
- PDF下载量: 84
- 被引次数: 22