

RBF Neural Network Robot Manipulator Control Based on Fuzzy Compensation
-
摘要: 针对机械手系统的高精度轨迹跟踪控制,提出了一种基于模糊补偿的RBF(radial basis function)神经网络机械手控制方法.该方法首先利用PD(proportional-integral)控制器获得机械手的控制策略,将其输出作为RBF神经网络的输入,并学习得到系统模型;然后运用模糊逻辑补偿器对系统扰动和建模误差进行补偿;最后,在MATLAB/Simulink平台上针对两关节机械臂,进行了有模糊补偿和无模糊补偿系统跟踪的均方根误差测量仿真实验.研究结果表明,两关节机械臂的控制精度分别提高了60.8%和71.4%,本文提出的方法能够解决机械手实际模型很难精确建立的问题,并能对系统未建模部分和扰动部分进行自适应补偿.Abstract: For achieving high precision trajectory tracking control of robot manipulators, a control strategy based on fuzzy logic compensation for radial basis function (RBF) neural networks has been proposed. First, the output of a proportional-integral (PD) controller was used in conjunction with an RBF neural network for obtaining a dynamic model of the robot manipulator system. A fuzzy compensator was then introduced for addressing the modelling errors and external disturbances. Furthermore, the fuzzy compensator control scheme and the non-fuzzy compensator control scheme were applied to two-degrees-of-freedom robot manipulators through simulation with MATLAB and Simulink, and the root mean square deviation of tracking errors was thereby measured. The obtained results show that the control accuracies of the first and second joints of the robot manipulators can be improved by 60.8% and 71.4%, respectively. Furthermore, the proposed control scheme can be applied to such robot manipulators which cannot be precisely modelled by compensating the non-modelled part and external disturbances of the system.
-
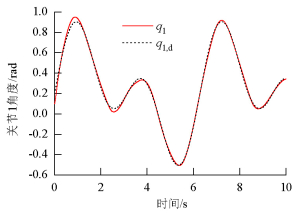
图 5 无模糊补偿关节1轨迹跟踪
Figure 5. Position tracking of the first joint without fuzzy compensator
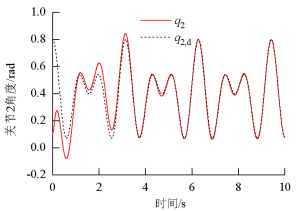
图 6 无模糊补偿关节2轨迹跟踪
Figure 6. Position tracking of the second joint without fuzzy compensator
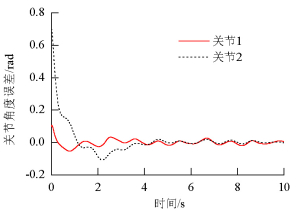
图 7 无模糊补偿两关节跟踪误差
Figure 7. Position tracking errors of the two joints without fuzzy compensator
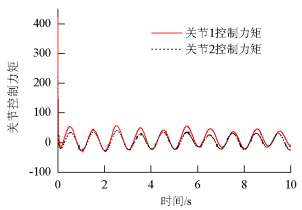
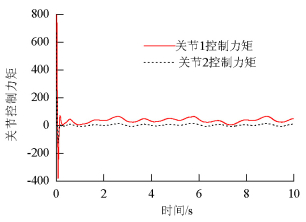
图 8 无模糊补偿两关节控制力矩
Figure 8. Control torques of the two joints without fuzzy compensator
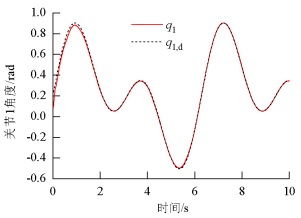
图 9 有模糊补偿关节1轨迹跟踪
Figure 9. Position tracking of the first joint with fuzzy compensator
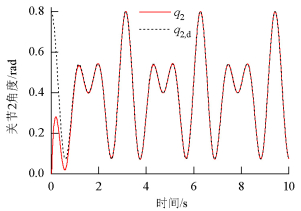
图 10 有模糊补偿关节2轨迹跟踪
Figure 10. Position tracking of the second joint with fuzzy compensator
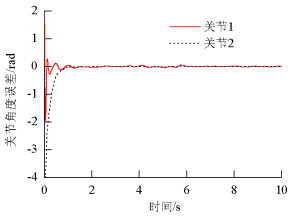
图 11 有模糊补偿两关节跟踪误差
Figure 11. Position tracking errors of the two joints with fuzzy compensator
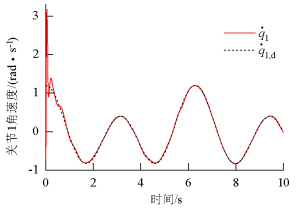
图 12 有模糊补偿关节1角速度
Figure 12. Angular velocity of the first joint with fuzzy compensator
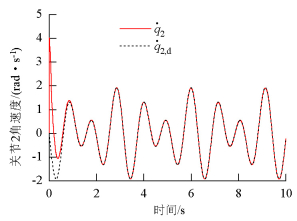
图 13 有模糊补偿关节2角速度
Figure 13. Angular velocity of the second joint with fuzzy compensator
表 1 两种控制方法误差RMSE对比
Table 1. Tracking errors represented by the RMSE for each joint using various control schemes
RMSE 关节1 关节2 RBF无模糊补偿 0.205 0 0.490 8 RBF有模糊补偿 0.080 3 0.140 6  下载: 导出CSV
下载: 导出CSV
-
蔡自兴.机器人学[M].北京:清华大学出版社, 2000:3-4. CRAIG J J. Introduction to robotics:mechanics and control[M].[S. l]: Addison-Wesley Pub. Co, 1986:95-98. 焦晓红, 李运锋, 方一鸣, 等.一种机器人鲁棒自适应控制法[J].机器人技术与应用, 2002(3):40-43. doi: 10.3969/j.issn.1004-6437.2002.03.011JIAO Xiaohong, LI Yunfeng, FANG Yiming, et al. A robust adaptive control strategy of robotic manipulator[J]. Robot Technique and Application, 2002(3):40-43. doi: 10.3969/j.issn.1004-6437.2002.03.011 陈启军, 王月娟, 陈辉堂.基于PD控制的机器人轨迹跟踪性能研究与比较[J].控制与决策, 2003(1):53-57. doi: 10.3321/j.issn:1001-0920.2003.01.011CHEN Qijun, WANG Yuejuan, CHEN Huitang. Comparative research of trajectory tracking performanceof robotic manipulator based on PD control scheme[J]. Control and Decision, 2003(1):53-57. doi: 10.3321/j.issn:1001-0920.2003.01.011 王良勇, 柴天佑.带有神经网络补偿的机械手PD控制[J].中国电机工程学报, 2009, 29(12):110-115. doi: 10.3321/j.issn:0258-8013.2009.12.019WANG Liangyong, CAI Tianyou. Neural network compensator based PD control of robotic manipulator[J]. Proceedings of the CSEE, 2009, 29(12):110-115. doi: 10.3321/j.issn:0258-8013.2009.12.019 王良勇, 杨枭.带有前馈和神经网络补偿的机械手系统轨迹跟踪控制[J].电机与控制学报, 2013, 17(8):113-118. doi: 10.3969/j.issn.1007-449X.2013.08.017WANG Liangyong, YANG Xiao.Trajectory tracking control for robotic manipulators endowed with feedforward and neural networks[J]. Electric Machines and Control, 2013, 17(8):113-118. doi: 10.3969/j.issn.1007-449X.2013.08.017 关新平, 唐英干, 段广仁.机械手臂基于神经网络动态补偿的自适应控制[J].控制理论与应用, 2003(1):101-104. http://d.old.wanfangdata.com.cn/Periodical/kzllyyy200301023GUAN Xinping, TANG Yinggan, DUAN Guangren. Adaptive control for manipulator based on neural network dynamic compensation[J]. Control Theory & Applications, 2003(1):101-104. http://d.old.wanfangdata.com.cn/Periodical/kzllyyy200301023 WAI R J, CHEN P C. Robust neural fuzzy network control for robot manipulator including actuator dynamics[J]. IEEE Transactions on Industrial Electronics, 2006, 53(4):1328-1349. doi: 10.1109/TIE.2006.878297 FENG G. A compensating scheme for robot tracking based on neural networks[J]. Robotics & Autonomous Systems, 1995, 15(3):199-206. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=58ea5492754b83b4f19379e8b6e8142b KIM Y H, LEWIS F L. Neural network output feedback control of robot manipulators[J]. IEEE Transactions on Robotics & Automation, 1999, 15(2):301-309. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=760351 董立红.基于模糊补偿的机械手鲁棒自适应模糊控制研究[J].计算机工程与科学, 2012, 34(1):169-173. doi: 10.3969/j.issn.1007-130X.2012.01.030DONG Lihong. Research on the robust adaptive fuzzy control of manipulator based on fuzzy compensation[J]. Computer Engineering & Science, 2012, 34(1):169-173. doi: 10.3969/j.issn.1007-130X.2012.01.030 CHEN Y, MA G, LIN S, et al. Adaptive fuzzy computed torque control for robot manipulator with uncertain dynamics[J]. International Journal of Advanced Robotic Systems, 2012, 9(1):142-170. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=d6a7baf3516215df038b1b2f0b08bfd9 YOO B K, HAM W C. Adaptive control of robot manipulator using fuzzy compensator[J]. IEEE Transactions on Fuzzy Systems, 2000, 8(2):186-199. doi: 10.1109/91.842152 SUN F C, SUN Z Q, FENG G. An adaptive fuzzy controller based on sliding mode for robot manipulators[J]. IEEE Transactions on Systems Man & Cybernetics Part B, 1999, 29(5):661-667. http://www.ncbi.nlm.nih.gov/pubmed/18252345 HSU C F, CHENG K H, LEE T T. Robust wavelet-based adaptive neural controller design with a fuzzy compensator[J]. Neurocomputing, 2009, 73(1):423-431. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=e6f76296cdef57feb4e6370061ad9bbb KIM D, HUH S H, SEO S J, et al. Self-organizing radial basis function network modeling for robot manipulator[C]//18th International Conference on Industrial and Engineering Applications of Artificial Intelligence and Expert Systems: Innovations in Applied Artificial Intelligence. Bari: IEA/AIE, 2005: 579-587. ABDESSEMED F. Svm-based control system for a robot manipulator[J]. International Journal of Advanced Robotic Systems, 2012, 9(6):247. doi: 10.5772/51192 刘金琨.智能控制[M].北京:电子工业出版社, 2014:92-93. 刘金琨.机器人控制系统的设计与MATLAB仿真[M].北京:清华大学出版社, 2008:35-36. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 338
- HTML全文浏览量: 257
- PDF下载量: 102
- 被引次数: 0