

Predictive Controller with UKBF for Marine Dynamic Positioning System
-
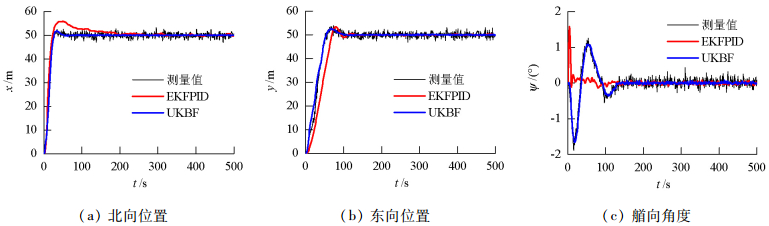
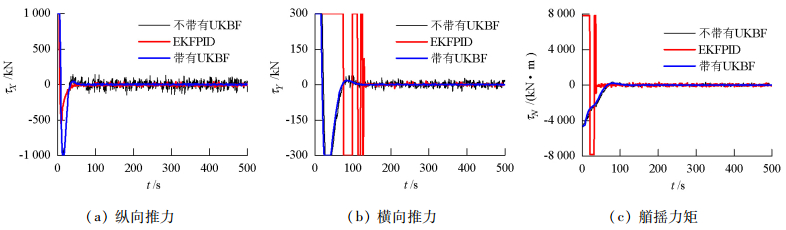
摘要: 为了精准设计水面船舶动力定位控制系统,将无迹卡尔曼布西滤波与非切换解析模型预测控制方法相结合提出一种预测控制器的设计方法.采用无迹卡尔曼布西滤波算法解决非线性连续系统的滤波问题,获取船舶运动状态的估计值;结合相对阶概念,根据船舶运动非线性模型,应用非切换解析模型预测控制方法设计动力定位非线性控制器,使船舶保持在指定位置.研究结果表明:设计控制器的输出较为平滑,有利于减少推进器磨损;设计控制器使船舶北向位置调节时间小于40 s,超调量小于5%,东向位置调节时间小于60 s,超调量小于5%,艏向角度的最大偏移量小于1.5°,令船舶快速到达了指定位置.Abstract: For surface vessel dynamic positioning (DP) system controls, a design method for predictive controllers is proposed based on the unscented Kalman-Bucy filtering (UKBF) algorithm and on a non-switching analytical model predictive control (NSAMPC) method. To avoid linearization and discretization errors in the model, the UKBF algorithm was applied to determine motion-state estimates of the ship. On the basis of the relative degree concept and non-linear ship motion models, an NSAMPC controller was designed in order to maintain a floating vessel at a specific position. The proposed method was verified by performing simulations on a marine supply vessel. The simulation results exhibit a smoother output of the designed controller, which is helpful for reducing the wear on the propeller. Moreover, the proposed controller results in a settling time of less than 40 s for the north position of the vessel with an overshoot of less than 5%. Likewise, the controller results in an east-position settling time of less than 60 s with an overshoot of less than 5%. In addition, the maximum offset of the vessel heading angle is less than 1.5°. The proposed controller allows the ship to reach the specific position quickly.
-
Key words:
- dynamic positioning /
- UKBF /
- relative degree /
- predictive controller
-
GRIMBLE M J, PATTON R J, WISE D A. The design of dynamic ship positioning control systems using extended Kalman filtering techniques[C]//OCEANS'79.[S.l.]: IEEE, 1979: 488-497. 蒋伊琳, 张芳园.基于自然选择粒子群的时钟同步算法[J].西南交通大学学报, 2017, 52(3):593-599. doi: 10.3969/j.issn.0258-2724.2017.03.021JIANG Yilin, ZHANG Fangyuan. Clock synchroniza-tion algorithm based on particle swarm optimization with natural selection[J]. Journal of Southwest Jiaotong University, 2017, 52(3):593-599. doi: 10.3969/j.issn.0258-2724.2017.03.021 GGERSIMO G R. Sensor fusion-based dynamic positioning of ships using extended Kalman and particle filtering[J]. Robotica, 2013, 31(3):389-403. doi: 10.1017/S0263574712000409 WANG Xiaofei, ZOU Zaojian, WANG Yang, et al. Path following control of underactuated ships based on unscented Kalman filter[J]. Journal of Shanghai Jiaotong University, 2010, 15(1):108-113. doi: 10.1007/s12204-010-8707-4 JAYASIRI A, NANDAN A, IMTIAZ S, et al. Dynamic positioning of vessels using a UKF-based observer and an NMPC-based controller[J]. IEEE Transactions on Automation Science & Engineering, 2017, 14(4):1778-1785. http://ieeexplore.ieee.org/document/7947197/ SÄRKKÄ S. On unscented Kalman filtering for state estimation of continuous-time nonlinear systems[J]. IEEE Transactions on Automatic Control, 2007, 52(9):1631-1641. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=c4d714d5b67fceda0701c014d148811c 苏义鑫, 赵俊.带有UKF滚动时域估计的船舶动力定位控制器设计[J].哈尔滨工程大学学报, 2016, 37(10):1381-1386, 1393. http://www.cnki.com.cn/Article/CJFDTotal-HEBG201610012.htmSU Yixin, ZHAO Jun. Dynamic positioning controller with UKF moving horizon estimation[J]. Journal of Harbin Engineering University, 2016, 37(10):1381-1386, 1393. http://www.cnki.com.cn/Article/CJFDTotal-HEBG201610012.htm HU X, DU J, SHI J. Adaptive fuzzy controller design for dynamic positioning system of vessels[J]. Applied Ocean Research, 2015, 53:46-53. doi: 10.1016/j.apor.2015.07.005 NGONGI W E, DU J, WANG R. Robust fuzzy controller design for dynamic positioning system of ships[J]. International Journal of Control, Automation and Systems, 2015, 13(5):1294-1305. doi: 10.1007/s12555-014-0239-5 PATHE D T M, LI H, BIAN G. Switching surface design for nonlinear systems:the ship dynamic positioning[J]. Telkomnika Indonesian Journal of Electrical Engineering, 2014, 12(4):2439-2447. http://cn.bing.com/academic/profile?id=f09e0aded5fe158ffbb72375f4e5f21d&encoded=0&v=paper_preview&mkt=zh-cn 王元慧, 隋玉峰, 吴静.基于非线性模型预测的船舶动力定位控制器设计[J].哈尔滨工程大学学报, 2013, 34(1):110-115. http://d.old.wanfangdata.com.cn/Periodical/hebgcdxxb201301018WANG Yuanhui, SUI Yufeng, WU Jing. Marine dynamic position system based on nonlinear model predictive control[J]. Journal of Harbin Engineering University, 2013, 34(1):110-115. http://d.old.wanfangdata.com.cn/Periodical/hebgcdxxb201301018 张金龙, 徐慧, 刘京南, 等.基于模糊神经网络的精密角度定位PID控制[J].仪器仪表学报, 2012, 33(3):549-554. doi: 10.3969/j.issn.0254-3087.2012.03.010ZHANG Jinlong, XU Hui, LIU Jingnan, et a1. PID control based on fuzzy neural network for precision angular alignment[J]. Chinese Journal of Scientific Instrument, 2012, 33(3):549-554. doi: 10.3969/j.issn.0254-3087.2012.03.010 KHAC D D. Global robust and adaptive output feedback dynamic positioning of surface ships[J]. Journal of Marine Science and Application, 2011, 3(9):325-332. http://www.cnki.com.cn/Article/CJFDTotal-HEBD201103015.htm 张国银, 杨智, 谭洪舟.一类非线性系统非切换解析模型预测控制方法研究[J].自动化学报, 2008, 34(9):1147-1156. http://d.old.wanfangdata.com.cn/Periodical/zdhxb200809016ZHANG Guoyin, YANG Zhi, TAN Hongzhou. Research on non-switch analytic nonlinear model predictive control method for a class of nonlinear systems[J]. Acta Automatic Sinica, 2008, 34(9):1147-1156. http://d.old.wanfangdata.com.cn/Periodical/zdhxb200809016 -

 下载:
下载:

 点击查看大图
点击查看大图

图(3)
计量
- 文章访问数: 493
- HTML全文浏览量: 166
- PDF下载量: 90
- 被引次数: 0