

Load Mechanisms and Design Method for Karst Subgrade Reinforced by Horizontal Geosynthetic Reinforcement
-
摘要: 为了解决现有设计方法未考虑水平加筋体的滑移效应,低估铁路路基面变形的问题,对水平加筋体加固铁路岩溶路基的受力机理进行了研究,提出了一种新的设计方法. 首先,明确了荷载传递机制和水平加筋体受力模型;然后,从严格控制铁路路基面变形的角度出发,在现有设计方法的基础上,考虑滑移效应并假定锚固区加筋体应变呈线性变化,通过引入加筋体松弛量建立了加筋体挠度修正公式;再次,提出了考虑滑移效应的水平加筋体加固铁路岩溶路基的设计方法,明确了验算内容和设计流程;最后,将所提方法应用于某模型试验,并与实测值及数值分析值进行了对比. 研究结果表明:考虑滑移效应能够有效修正路基面变形计算值,路基面变形值由0.18 m修正为0.25 m,接近于实测值0.23 m和数值分析值0.21 m,方法准确,可为实际设计提供依据.Abstract: In order to solve the problem that the existing design methods do not consider the frictional effect of the horizontal reinforcement, and the deformation of the railway surface was underestimated, the load mechanism for railway karst subgrade reinforced by horizontal geosynthetic reinforcement was studied and a new design was proposed. Firstly, the mechanism of load transfer and mechanical model were indicated. And then, from the perspective of strictly controlling the deformation of railway subgrade surface, on the basis of the existing design methods, taking into account the frictional effect, assuming that the strain in anchorage zone changes linearly, the correction formula of reinforcement deflection was established by introducing the relaxation length. Furthermore, the design method considering the frictional effect for railway karst subgrade reinforced by horizontal reinforcement was put forward; in addition, the verification content and design process were also proposed. Finally, the method proposed was applied to a model test, and the result was compared with the results of model test and numerical analysis. The research results show that: considering the frictional effect can effectively modifier the calculated deformation of subgrade surface, which can increase from 0.18 m to 0.25 m, and was close to the model test value of 0.23 m and the numerical analysis value of 0.21 m; the method proposed is reasonable and can provide reference for actual design.
-
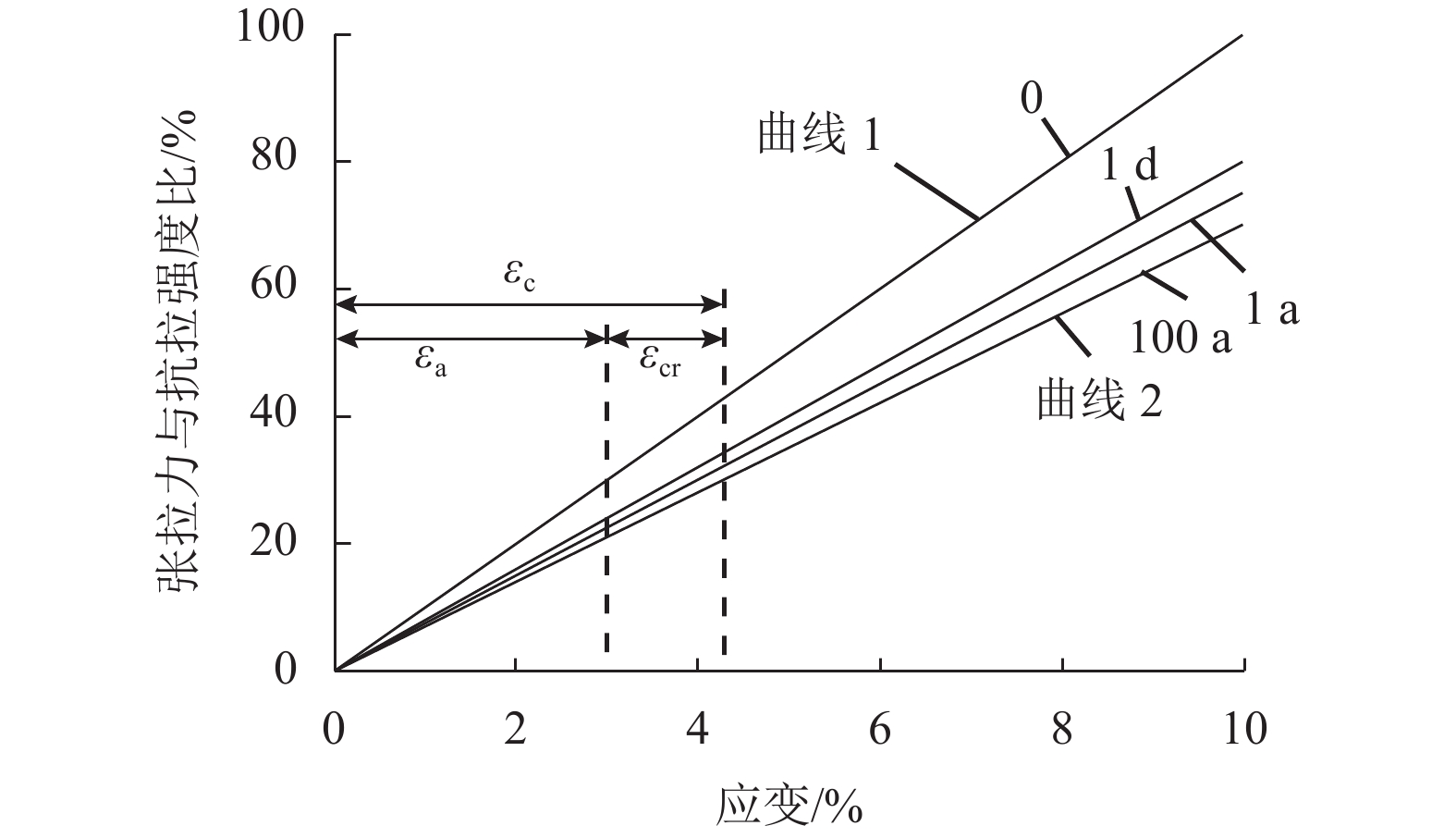
图 5 某水平加筋体的张拉力-应变-时间特征曲线
Figure 5. Tension-strain-time curve of horizontal reinforcement
表 1 模型试验和数值计算的参数
Table 1. Parameters of model test and numerical analysis
参数 取值 填方高度/m 1 填料重度/(kN•m–3) 15.65 填料内摩擦角/(°) 36 溶洞直径/m 2.2 水平加筋体拉伸模量/(kN•m–1) 2 988 附加荷载/kN 0 锚固长度/m 3  下载: 导出CSV
下载: 导出CSV
表 2 路基面变形对比
Table 2. Comparison of deformation of subgrade surface
模型试验 数值分析 RAFAEL方法 本文方法 0.23 0.21 0.18 0.25
下载: 导出CSV
-
COOPER H A, SAUNDERS M J. Road and bridge construction across gypsum karst in England[J]. Engineering Geology, 2002, 65(1): 217-223. GIROUD J P, BONAPARTE R, BEECH J F, et al. Design of soil layer-geosynthetic systems overlying voids[J]. Geotextiles and Geomembranes, 1990, 9(1): 11-50. doi: 10.1016/0266-1144(90)90004-V WANG M C, FENG Y X. Stability of geosynthetic-reinforced soil above a cavity[J]. Geotextiles and Geomembranes, 1996, 14(1): 95-109. VILLARD P, BRIANCON L. Design of geosynthetic reinforcements for platforms subjected to localized sinkholes[J]. Canadian Geotechnical Journal, 2008, 45(2): 196-209. doi: 10.1139/T07-083 吕伟华,缪林昌,王非. 基于不完全土拱效应的土工格栅加固机制与设计方法[J]. 岩石力学与工程学报,2012,31(3): 632-639. doi: 10.3969/j.issn.1000-6915.2012.03.023LÜ Weihua, MIAO Linchang, WANG Fei. Mechanism of geogrid reinforcement based on partially developed soil arch effect and design method[J]. Chinese Journal of Rock Mechanics and Engineering, 2012, 31(3): 632-639. doi: 10.3969/j.issn.1000-6915.2012.03.023 王非,缪林昌. 落水洞上覆路堤土工加筋设计新方法[J]. 东南大学学报(自然科学版),2012,31(3): 632-639.WANG Fei, MIAO Linchang. New design method of geosynthetic-reinforced Embankment over sinkholes[J]. Journal of Southeast University (Natural Science Edition), 2012, 31(3): 632-639. 贺炜,付宏渊,殷苗苗. 岩溶区路堤下水平加筋体受力分析方法研究[J]. 水文地质工程地质,2010,37(6): 33-37. doi: 10.3969/j.issn.1000-3665.2010.06.007HE Wei, FU Hongyuan, YIN Miaomiao. Study on calculating method of horizontally reinforcement beneath embankment constructed in Karst terrain[J]. Hydrogeology & Engineering Geology, 2010, 37(6): 33-37. doi: 10.3969/j.issn.1000-3665.2010.06.007 陈仁朋,汪焱卫,陈金苗. 桩网结构路基格栅加筋作用及其拉力特性研究[J]. 西南交通大学学报,2016,51(6): 1080-1086. doi: 10.3969/j.issn.0258-2724.2016.06.006CHEN Renpeng, WANG Yanwei, CHEN Jinmiao. Reinforcing mechanism and tension behaviors of geogrid in pile-supported reinforced embankment[J]. Journal of Southwest Jiaotong University, 2016, 51(6): 1080-1086. doi: 10.3969/j.issn.0258-2724.2016.06.006 TERZAGHI K. Theoretical soil mechanics[M]. New York: John Wiley & Sons, 1943: 37 -42 郑俊杰,周燕君,曹文昭,等. 不同网孔形状格栅加筋土界面特性试验研究[J]. 西南交通大学学报,2017,52(3): 482-488. doi: 10.3969/j.issn.0258-2724.2017.03.007ZHENG Junjie, ZHOU Yanjun, CAO Wenzhao, et al. Experimental study of interface behavior of geogrids with different aperture shapes[J]. Journal of Southwest Jiaotong University, 2017, 52(3): 482-488. doi: 10.3969/j.issn.0258-2724.2017.03.007 British Standard Institution. Code of practice for strengthened/reinforced soils and other fills: BS8006-1—2010[S]. London: British Standard Institution, 2010 LEONARD J W. Tension structures[M]. NewYork: McGraw-Hill, 1988: 35-49 朱斌,陈若曦,陈云敏. 抗沟渠型空洞水平加筋体的作用机理及设计方法[J]. 中国公路学报,2009,22(1): 11-16. doi: 10.3321/j.issn:1001-7372.2009.01.002ZHU Bin, CHEN Ruoxi, CHEN Yunmin. Action mechanism and design method of horizontal reinforcement subjected to trench void[J]. China Journal of Highway and Transport, 2009, 22(1): 11-16. doi: 10.3321/j.issn:1001-7372.2009.01.002 HUCKERT A, BRIANON L, VILLARD P, et al. Load transfer mechanisms in geotextile-reinforced embankments overlying voids:Experimental and analytical approaches[J]. Geotextiles and Geomembranes, 2016, 44(1): 442-456. VILLARD P, HUCKERT A, BRIANON L, et al. Load transfer mechanisms in geotextile-reinforced embankments overlying voids:Numerical approach and design[J]. Geotextiles and Geomembranes, 2016, 44(1): 381-395. 铁道第四勘察设计院. 铁路路基土工合成材料应用设计规: TB10118—2006[S]. 北京: 中国铁道出版社, 2006 中华人民共和国水利部. 土工合成材料应用技术规范: GB/T50290—2014[S]. 北京: 中国计划出版社, 2014 GEOTECHNIK. Recommendations for design and analysis of earth structures using geosynthetic reinforcements—EBGEO[M]. Berlin: Ernst & Sohn, 2011: 97-99 胡一峰, 李怒放. 高速铁路无砟轨道路基设计原理[M]. 北京: 中国铁道出版社, 2010: 194-195 -

 下载:
下载:


 点击查看大图
点击查看大图
图(5) / 表(2)
计量
- 文章访问数: 651
- HTML全文浏览量: 277
- PDF下载量: 2
- 被引次数: 0