

Large Shaking Table Test on Seismic Response of Site with Tilted Interlayer
-
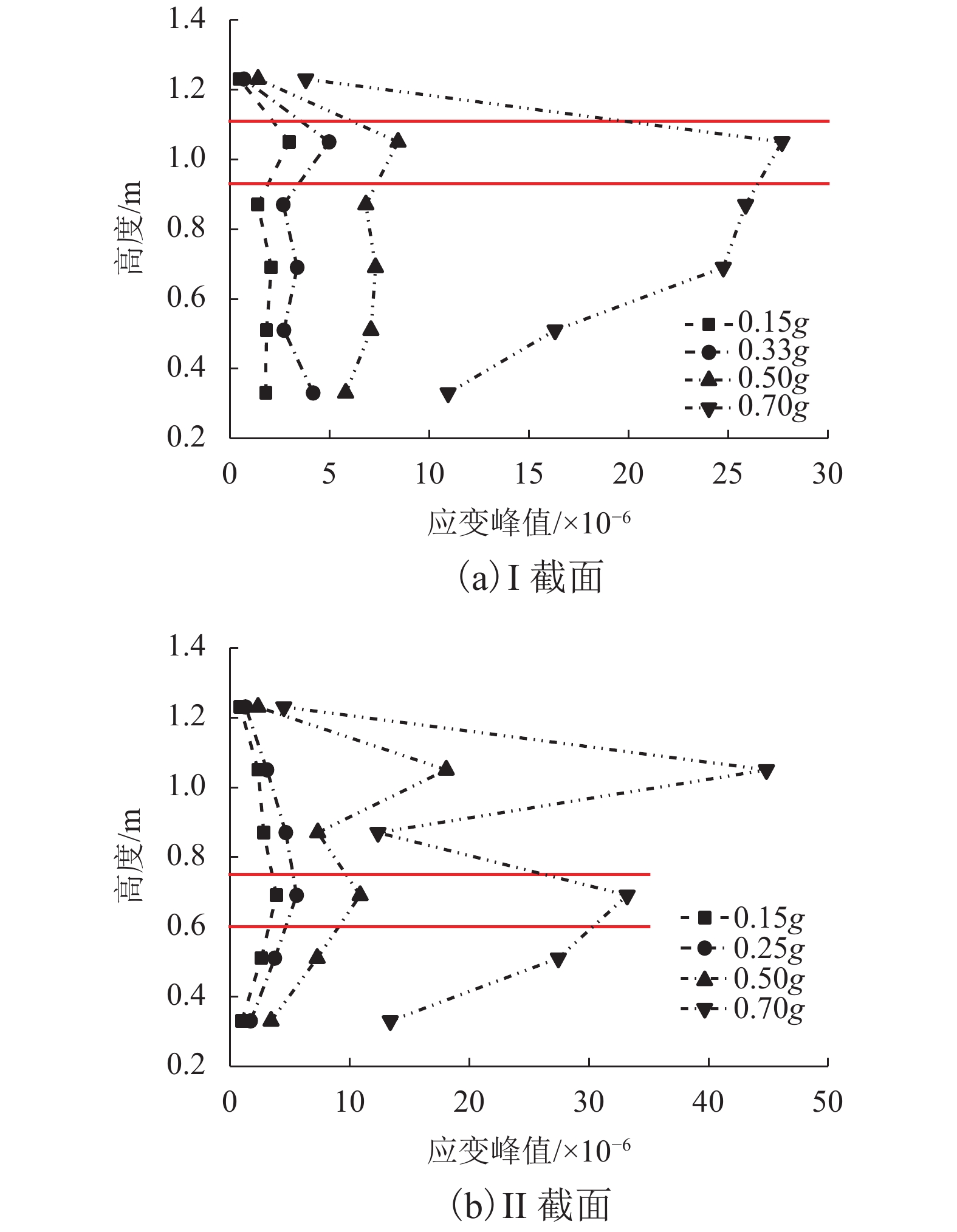
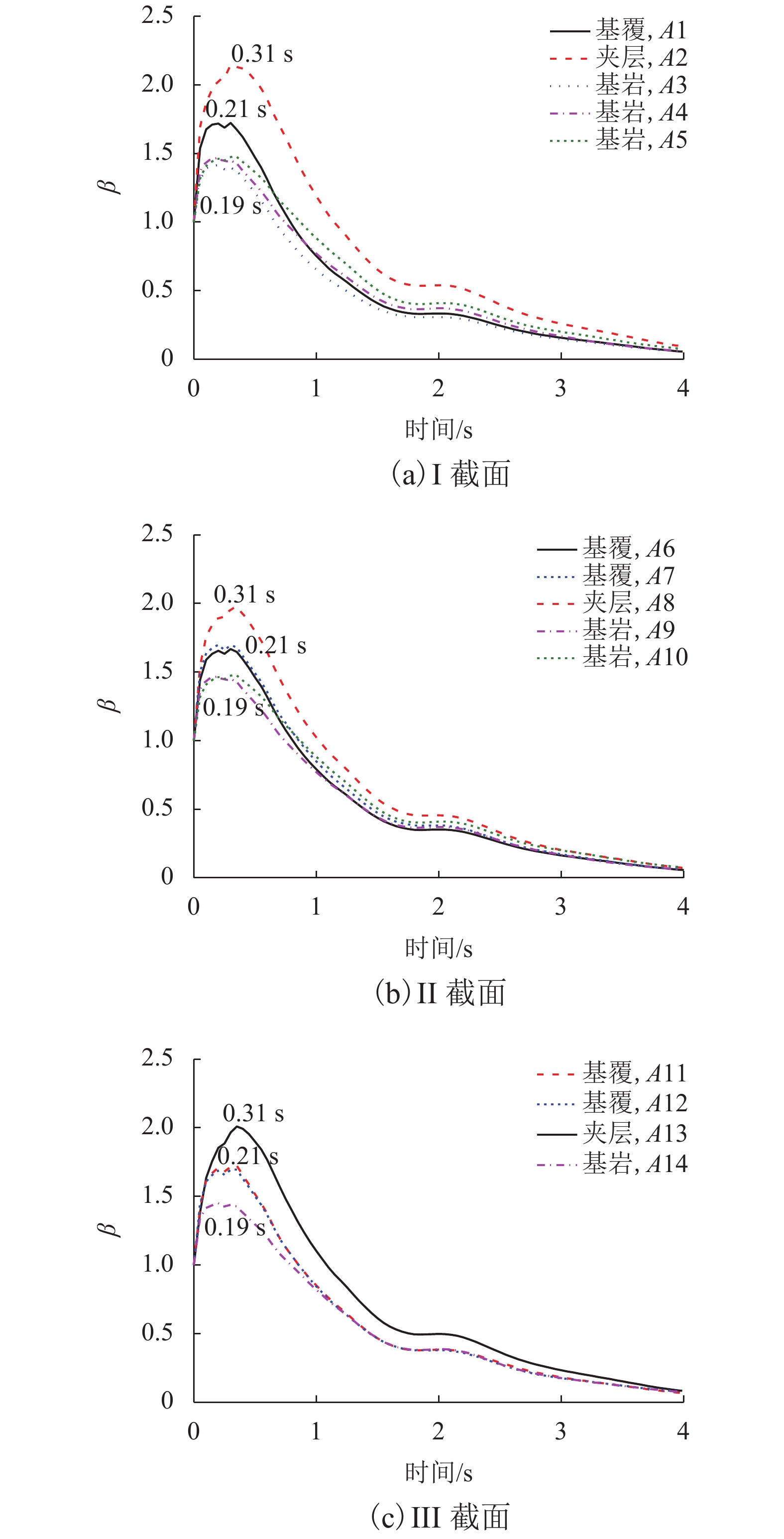
摘要: 为了研究含倾斜夹层场地在地震作用下的动力响应及为可能的场地加固提供指导,基于大型振动台模型试验,研究了含倾斜夹层场地在El Centro地震波作用下的加速度、应变及位移响应特征,同时通过频谱分析讨论了夹层对场地稳定性的影响,并用拟静力分析得到场地的启动临界加速度及场地的稳定系数. 试验结果表明:夹层对于加速度峰值存在明显的削弱效果,加载地震波峰值越大,削弱程度越大,同时基岩中加速度放大系数呈现“量级饱和”特征;夹层处应变峰值最大,当加载地震波峰值大于0.33g时,场地平台与斜坡拐角下基覆中存在另一峰值,应变形状呈现“W”形;夹层对20 Hz附近频段的傅里叶幅值有一定的削弱作用,同一土层反应谱卓越周期基本一致,不同土层反应谱差别较大,夹层处(0.31 s)卓越周期大于基岩(0.19 s)与基覆处(0.21 s);拟静力分析显示0.33g时场地的稳定系数为3.16,强风化带启动的临界加速度为1.42g.Abstract: To investigate the dynamic response of a complex site with a tilted interlayer and provide a potential reinforcement for the site, a large-scale shaking table model test was done to study the acceleration, strain and displacement responses of the site. The effects of the interlayer on the stability of the site are discussed based on an analysis of the Fourier spectrum and response spectrum under the El Centro seismic wave. Furthermore, the critical acceleration and stability factor of the site are obtained through a pseudo-static analysis. Experimental results show that the interlayer obviously weakens the peak acceleration of the seismic wave and that the degree of impairing effects intensifies with the seismic peak acceleration increasing. There is a feature of ‘magnitude saturation’ for the acceleration amplification coefficient (AAC) of the position of bedrock. The peak strain of the interlayer is greater than those of the other layers. When the input earthquake amplitude is larger than 0.33g, there is another peak strain in the cover layer which is located at a platform corner and the strain curve presents a form is ‘W’. The interlayer can also weaken to some extent the amplitude of the Fourier spectrum at about 20 Hz. The predominant periods of theresponse spectra measured from different cross sections of the same soil layer are similar, but obviously different between different soil layers. The predominant period of the interlayer (0.31 s) is greater than those of the bedrock layer (0.19 s) and the cover layer (0.21 s). According to the pseudo-static analysis, when the peak acceleration of the seismic wave loaded is 0.33g, the site stability factor is 3.16, and the critical acceleration of the potential slip area is 1.42g.
-
Key words:
- site /
- tilted interlayer /
- dynamic response /
- shaking table test /
- stability
-

图 3 试验测点布置示意图及应变带
Figure 3. Monitoring points layout of the completed model and the strip of strain gauge
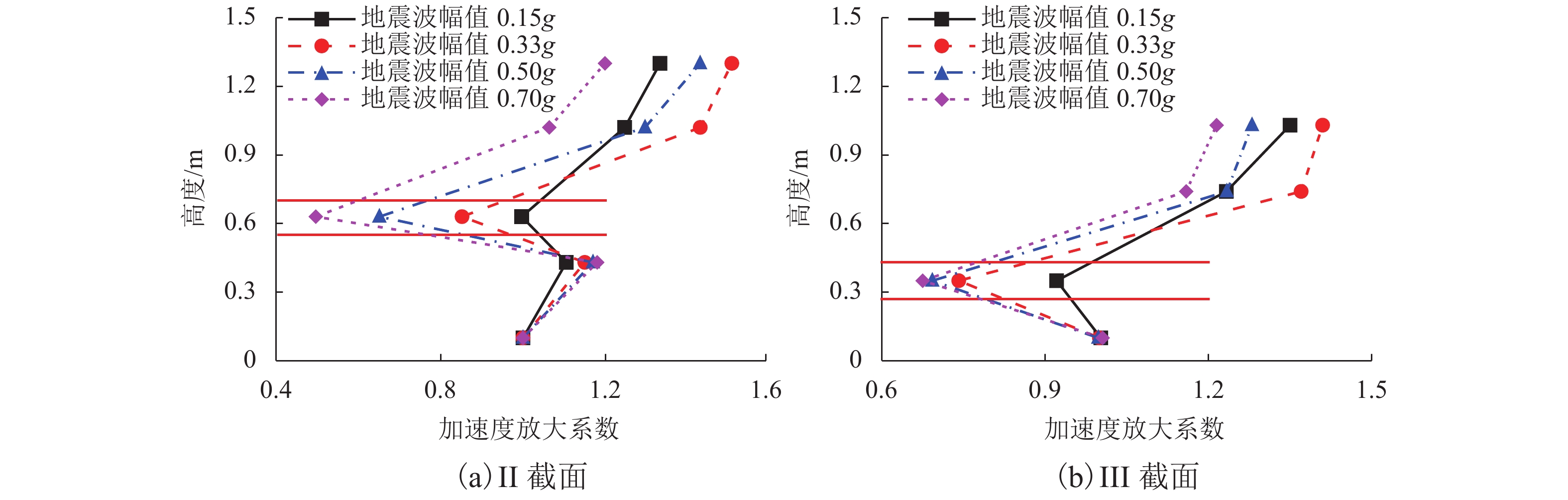
图 5 II截面、III截面加速度放大系数变化规律
Figure 5. Variations of the AAC in section II and section III
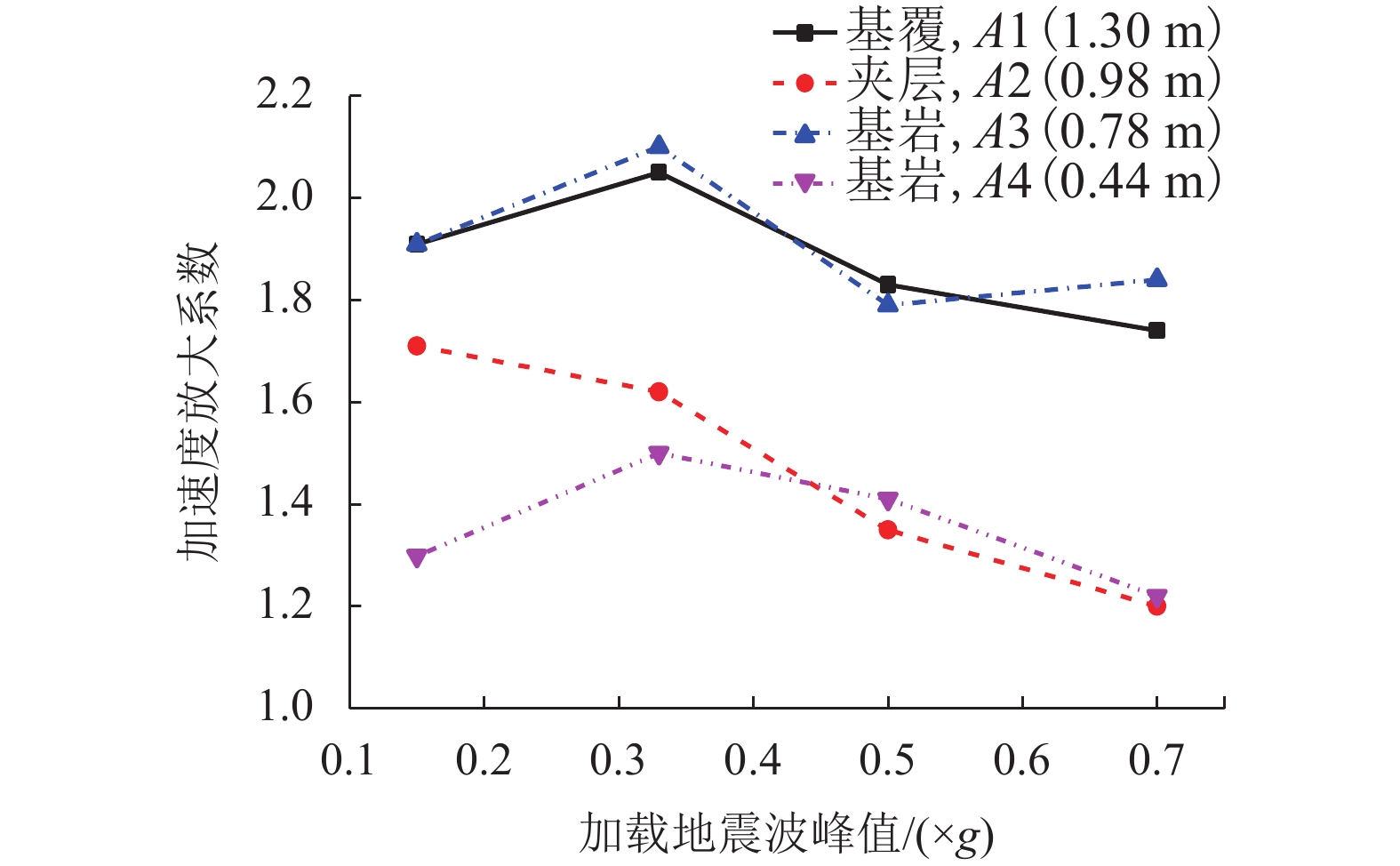
图 6 加速度放大系数随加载波峰值变化规律
Figure 6. Variations of AAC with the increase of loading seismic wave amplitude
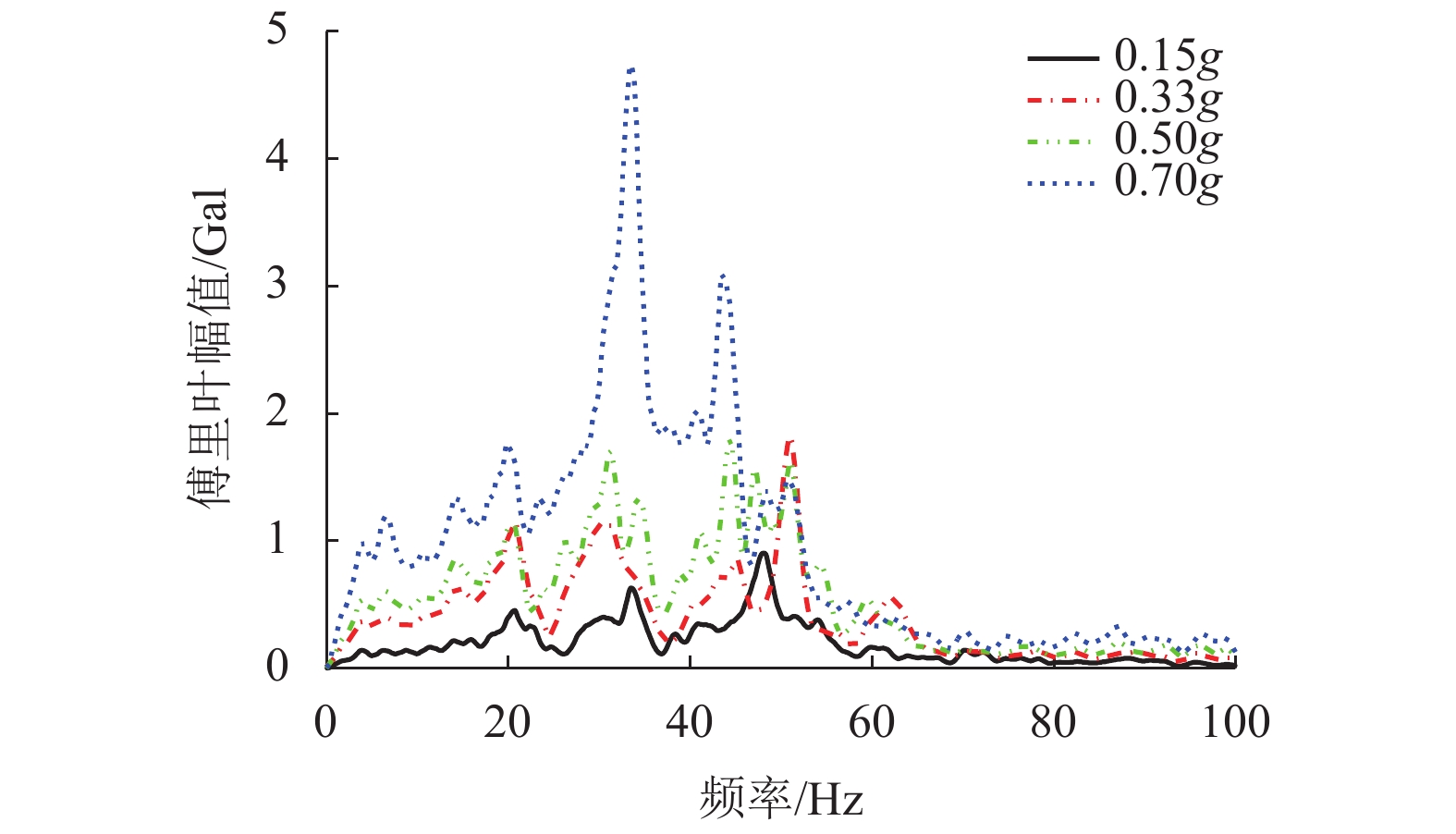
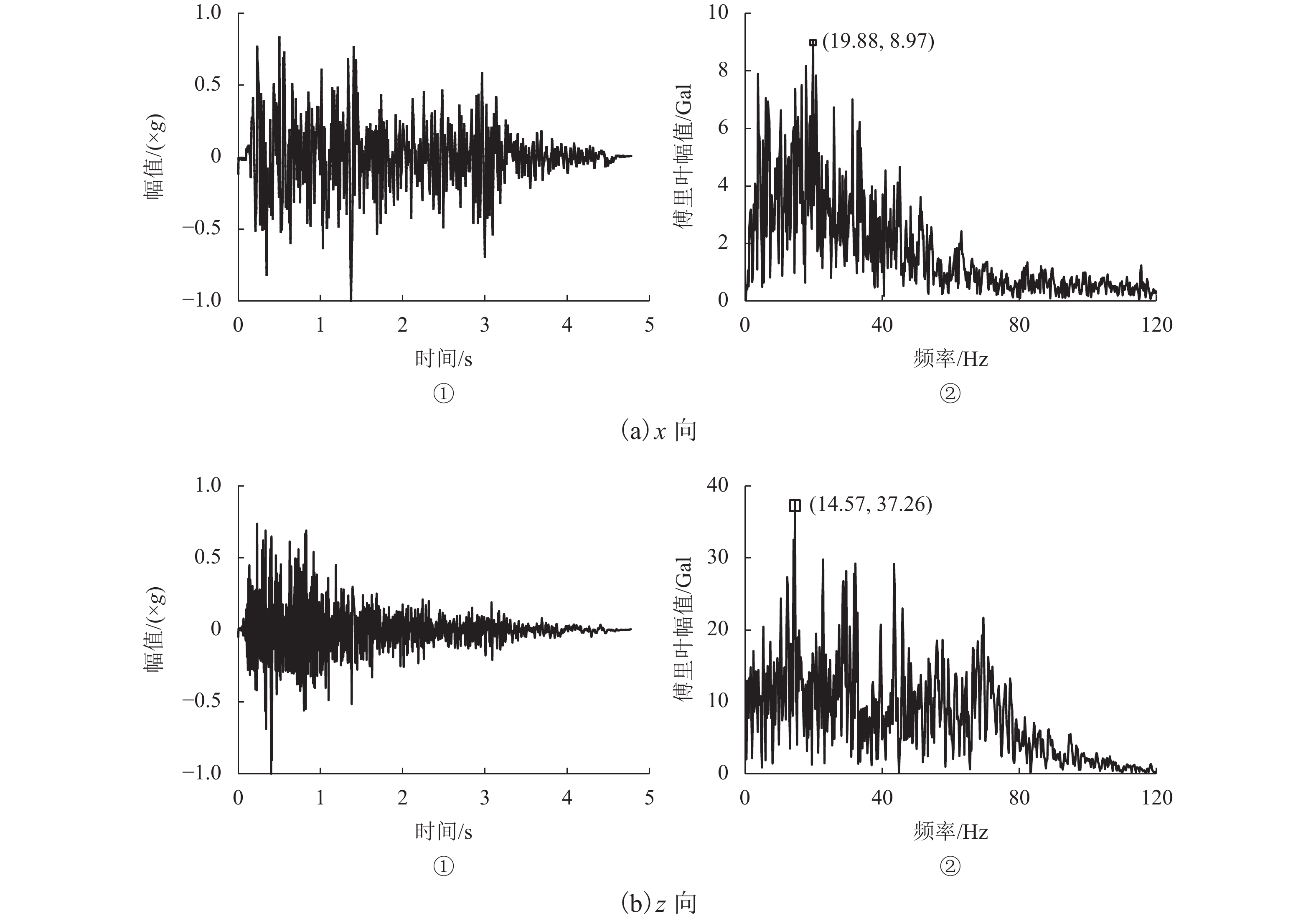
图 8 傅里叶谱随加载地震波幅值变化规律
Figure 8. Fourier spectra for different amplitudes of loading seismic wave
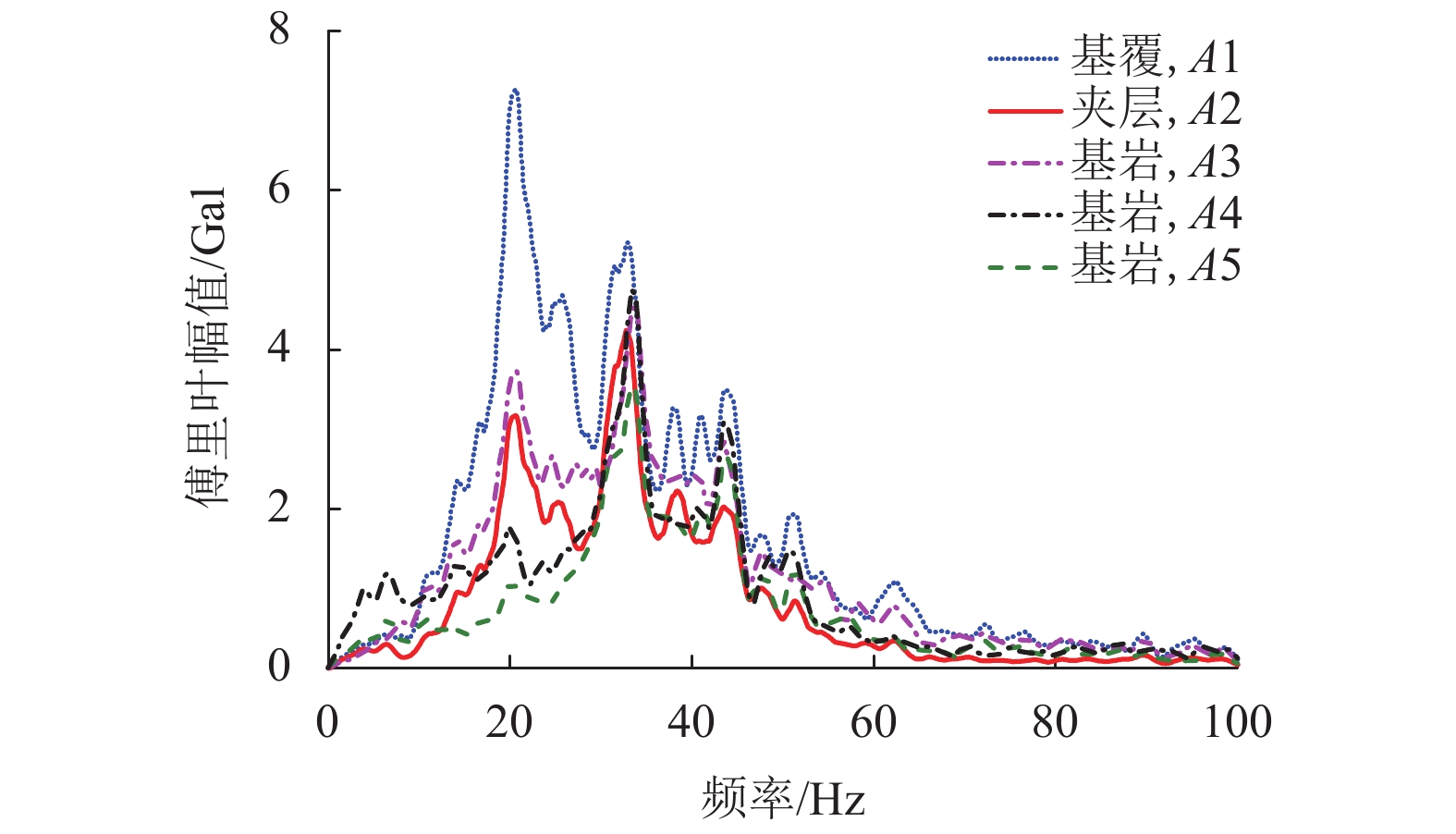
图 9 I截面傅里叶谱随高度变化规律
Figure 9. Fourier spectrum change of section I when altitude changes
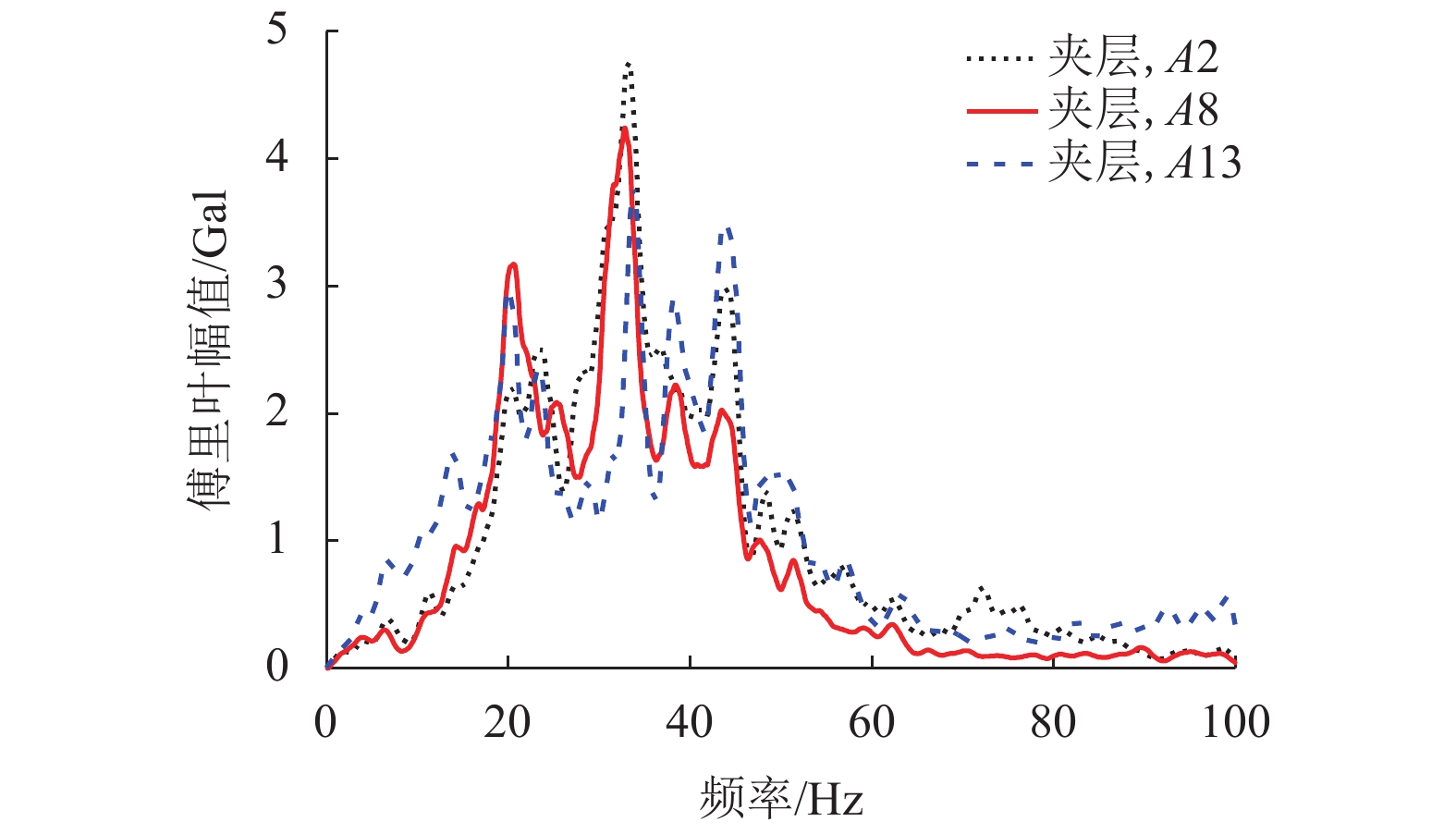
图 10 不同位置夹层傅里叶谱变化规律
Figure 10. Fourier spectra of interlayer located at different altitudes
表 1 振动台概况
Table 1. Details of the shaking table
参数 取值 自由度 6 尺寸 6 m × 6 m 最大负载/kN 600 最大水平位移/mm ± 150 最大垂直位移/mm ± 100 满载最大水平加速度/(×g) 1 满载最大垂直加速度/(×g) 0.8 空载最大水平加速度/(×g) 3 空载最大垂直加速度/(×g) 2.6 频率范围/Hz 0.1~80.0  下载: 导出CSV
下载: 导出CSV
表 2 模型试验物理量相似常数
Table 2. Physical quantities and similarity constants of the model
序号 物理量 相似关系 相似常数 备注 1 几何尺寸L c1 70 控制量 2 土体密度ρ c2 1 控制量 3 重力加速度g c3 = 1 1 控制量 4 泊松比μ c4 = 1 1 导出量 5 变形模量E c5 = a1 70 导出量 6 内摩擦角φ c6 = 1 1 导出量 7 粘聚力c c7 = a1 5 导出量 8 剪切波速Vs c8 = a10.5 8.37 导出量 9 持续时间T c9 = a10.5 8.37 导出量 10 输入加速度a1 c10 = 1 1 导出量 11 输入振动频率ω c11 = a1–0.5 0.119 导出量 12 响应线位移s c12 = a1 70 导出量 13 响应角位移θ c13 = 1 1 导出量 14 响应应变ε c14 = 1 1 导出量 15 响应速度V c15 = a10.5 8.37 导出量 16 响应应力σ c16 = a1 70 导出量 17 响应加速度a2 c17 = 1 1 导出量
下载: 导出CSV
表 3 模型和原型土体参数
Table 3. Parameters of soil in the model and prototype
土层 类型 ρ/(g•cm–3) E/Pa φ/(°) c/kPa μ 基覆 模型 2.1 3.5 × 104 41 6.00 0.25 原型 2.1 2.5 × 106 40 6.00 0.25 夹层 模型 1.8 3.8 × 103 12 0.75 0.30 原型 1.8 2.7 × 105 21 65.00 0.30 基岩 模型 2.5 7.5 × 104 45 12.00 0.20 原型 2.5 5.5 × 106 45 790.00 0.20
下载: 导出CSV
表 4 不同加载地震波幅值时边坡位移
Table 4. Displacements of slopes under different El Centro seismic wave amplitudes
加载地震
波幅值坡顶1.30 m 坡中1.11 m 坡底0.92 m 峰值 永久 峰值 永久 峰值 永久 0.15g 0.91 – 0.02 0.80 0.01 0.94 – 0.03 0.33g 2.14 – 0.03 1.83 0.01 2.06 – 0.04 0.50g 3.16 – 0.01 2.77 0.02 3.28 – 0.20 0.70g 5.58 – 0.58 4.73 – 0.58 5.37 – 0.51
下载: 导出CSV
-
杨福荣. 三峡库区万州港望天咀码头场地稳定性评价[D]. 成都: 成都理工大学, 2012 智晶子. 重庆武隆机场场地稳定性研究[D]. 成都: 成都理工大学, 2011 吴野. 贵州毕节机场环境地质条件及场地稳定性评价[D]. 成都: 成都理工大学, 2010 邓学晶. 城市垃圾填埋场振动台模型试验与地震稳定性分析方法研究[D]. 大连: 大连理工大学, 2007 武小菲,王鹰,叶唐进,等. G318林芝—波密段斜坡地震动力响应及失稳机理[J]. 西南交通大学学报,2017,52(3): 571-577.WU Xiaofei, WANG Ying, YE Tangjin, et al. Seismic dgmamic response and instability mechanism of slopes in Nying—Bome seetion of G318 high way, Tibet[J]. Journal of Soutwest Jiaotong university, 2017, 52(3): 571-577. 黄润秋,李果,巨能攀. 层状岩体斜坡强震动力响应的振动台试验[J]. 岩石力学与工程学报,2013,32(5): 865-876. doi: 10.3969/j.issn.1000-6915.2013.05.003HUANG Runqiu, LI Guo, JU Nengpan. Shaking table test on strong earthquake response of stratified rock slopes[J]. Chinese Journal of Rock Mechanics and Engineering, 2013, 32(5): 865-876. doi: 10.3969/j.issn.1000-6915.2013.05.003 张建经,韩鹏飞. 重力式挡墙基于位移的抗震设计方法研究——大型振动台模型试验研究[J]. 岩土工程学报,2012,34(3): 417-423.ZHANG Jianjing, HAN Pengfei. Displacement-based aseismic design method for gravity retaining walls—large scale shaking table tests[J]. Chinese Journal of Geotechnical Engineering, 2012, 34(3): 417-423. 董金玉,杨国香,伍法权,等. 地震作用下顺层岩质边坡动力响应和破坏模式大型振动台试验研究[J]. 岩土力学,2011,32(10): 2977-2988. doi: 10.3969/j.issn.1000-7598.2011.10.014DONG Jinyu, YANG Guoxiang, WU Faquan, et al. The large-scale shaking table test study of dynamic response and failure mode of bedding rock slope under earthquake[J]. Rock and Soil Mechanics, 2011, 32(10): 2977-2988. doi: 10.3969/j.issn.1000-7598.2011.10.014 刘汉香, 许强, 徐鸿彪, 等. 斜坡动力变形破坏特征的振动台模型试验研究[J]. 岩土力学, 2011, 32(2): 334-339LIU Hanxiang, XU Qiang, XU Hongbiao, et al. Shaking table model test on slope dynamic deformation and failure[J]. Rock and Soil Mechanics, 2011, 32(2): 334-339 文畅平,杨果林. 地震作用下挡土墙位移模式的振动台试验研究[J]. 岩石力学与工程学报,2011,30(7): 1502-1512.WEN Changping, YANG Guolin. Large-scale shaking table tests study of seismic displacement mode of retaining structures under earthquake loading[J]. Chinese Journal of Rock Mechanics and Engineering, 2011, 30(7): 1502-1512. 中国地震局. 中国地震动参数区划图: GB18306—2015[S]. 北京: 中国标准出版社, 2015 徐挺. 相似方法及其应用[M]. 北京: 机械工业出版社, 1995: 40-47 王志佳,张建经,闫孔明,等. 考虑动本构关系相似的模型土设计及相似判定体系研究[J]. 岩土力学,2015,36(5): 1328-1332,1338.WANG Zhijia, ZHANG Jianjing, YAN Kongming, et al. Model soil design considering similitude of dynamic constitutive model and evaluation of similarity level[J]. Rock and Soil Mechanics, 2015, 36(5): 1328-1332,1338. WANG Z J, FAN G, HAN J, et al. Reference strain γ in hyperbolic modeling of dynamic shear modulus of soils[C]//IACGE 2013: Challenges and Recent Advances in Geotechnical and Seismic Research and Practices: Proceedings of the Second International Conference on Geotechnical and Earthquake Engineering. Chengdu: American Society of Civil Engineers. 2015: 271-278 MARTIN P P, SEED H B. One-dimensional dynamic ground response analyses[J]. Journal of the Geotechnical Engineering Division, 1982, 108(7): 935-952. 张建经, 曹礼聪, 王志佳. 一种振动台试验中测量土体分层应变的应变带: CN105758363A[P]. 2016-07-13 铁道第一勘察设计院. 铁路路基设计规范: TB1001—2005[S]. 2版. 北京: 中国铁道出版社, 2005 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 743
- HTML全文浏览量: 403
- PDF下载量: 13
- 被引次数: 0