

Seismic Response Analysis of High-Pier Bridge under Near-Fault Multiple Pulse Record Excitation
-
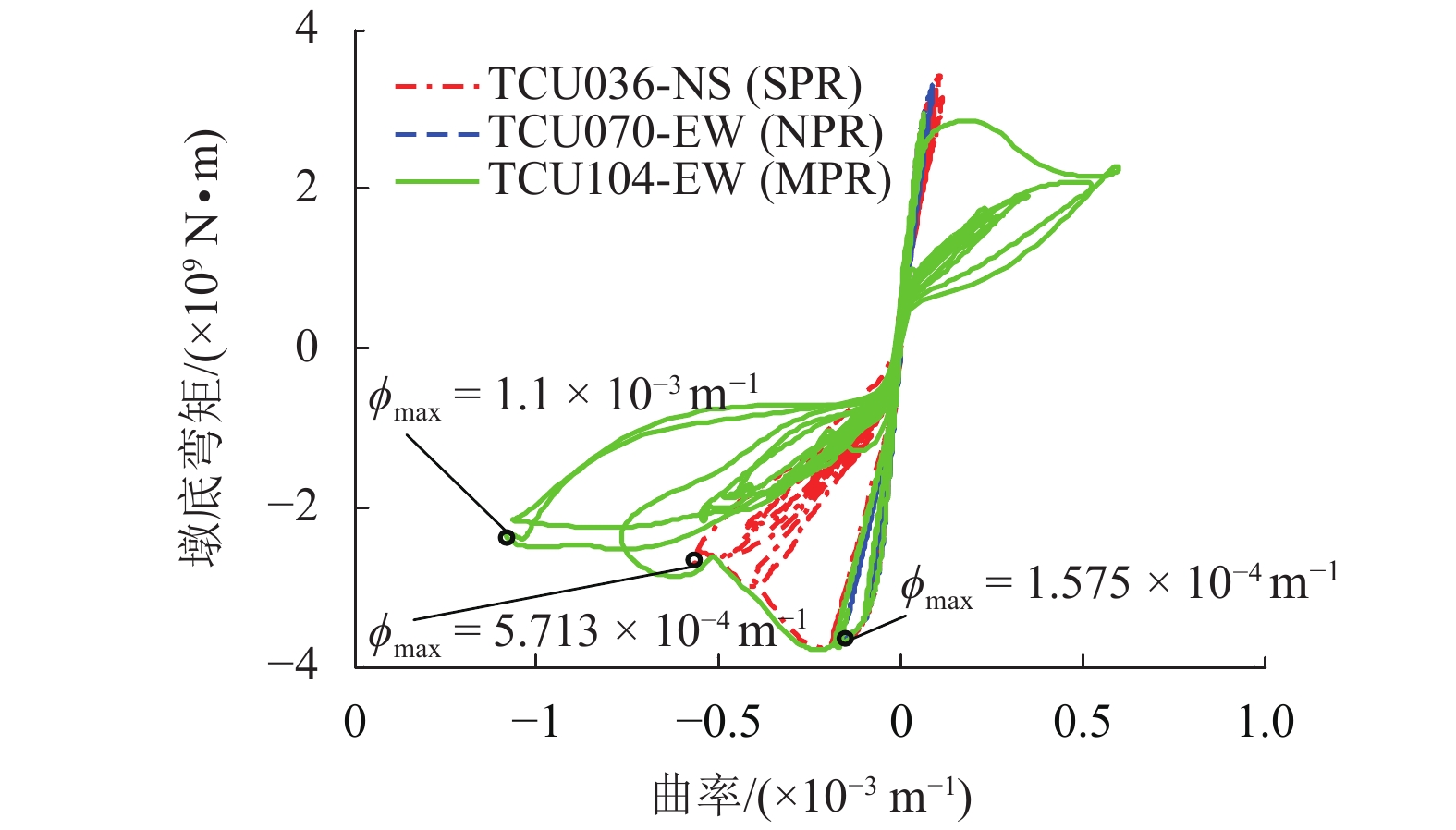
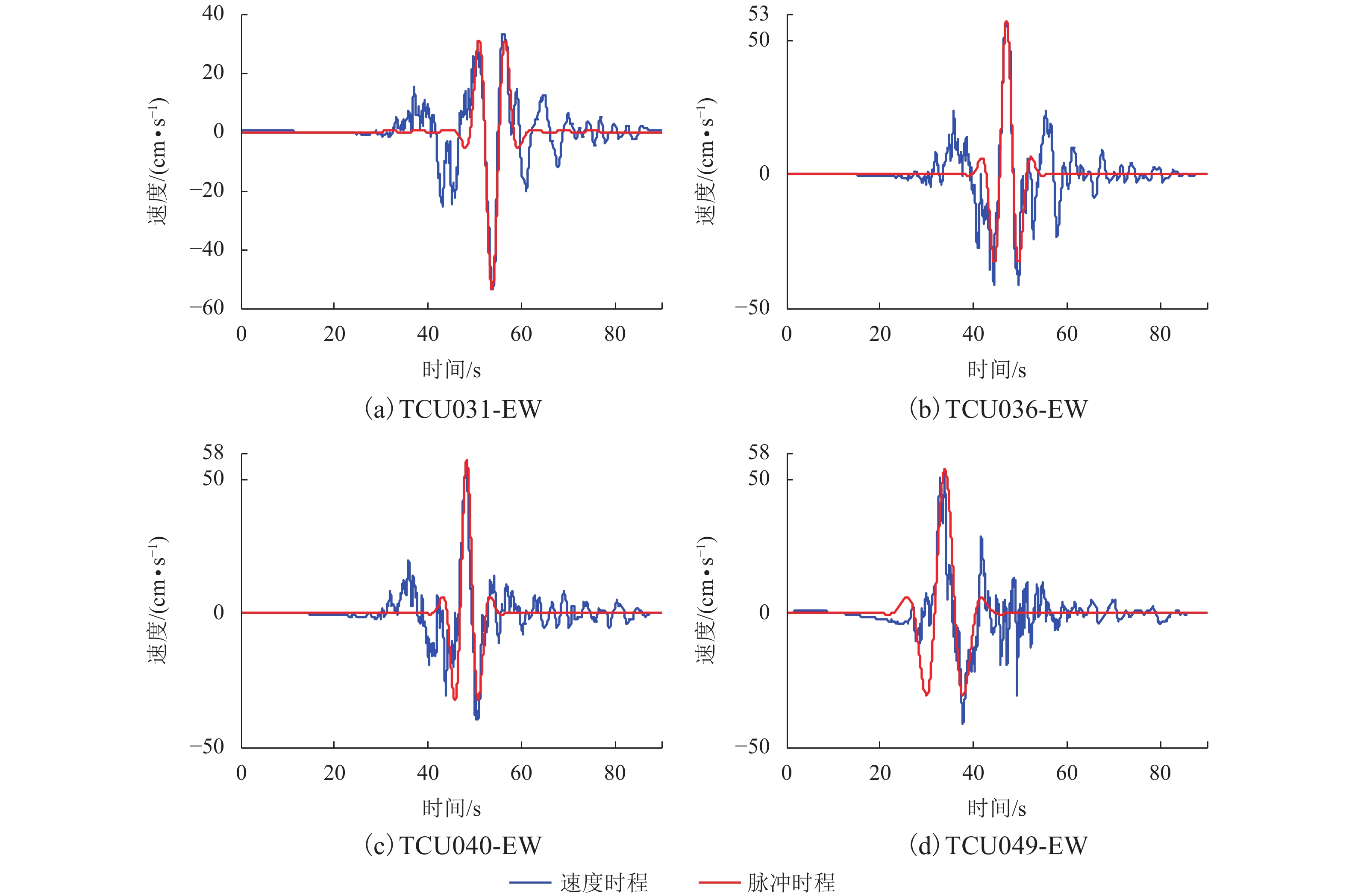
摘要: 为了研究近断层地震的多脉冲效应对不规则高墩大跨桥梁非线性地震响应的影响,首先,采用眼观识别的方法选取了典型的多脉冲、单脉冲和非脉冲3组地震动;然后,采用小波变换识别方法和能量识别方法对其脉冲性进行识别,研究了脉冲地震动识别方法对多脉冲地震动的适用性;最后,以某大跨度高墩桥梁为例,基于OpenSees建立了其非线性有限元模型,对其进行了非线性地震响应分析,对比研究了近断层多脉冲地震动及单脉冲地震动对不规则高墩桥梁非线性地震响应的影响. 研究结果表明:现有的近断层脉冲识别方法只适用于速度时程中只含有一个主脉冲的地震动,对于多脉冲地震动,其失效的可能性非常大;近断层脉冲地震动对不规则高墩桥梁具有更强的破坏性,特别是在多脉冲地震作用下,1号、2号两个高墩的墩顶位移需求分别增加了118.9%和109.6%,墩底弯矩和墩底曲率也有明显的增大;近场多脉冲地震作用下主梁的碰撞次数增大了3~5倍,碰撞力也会增大2~3倍,主梁更容易发生严重的碰撞破坏,在抗震设计时应采取适当防撞措施.Abstract: The multiple pulse effect of near-fault seismic records on the nonlinear seismic response of high pier railway bridges (HPRB) was investigated. First, three representative groups of seismic records, namely, single pulse record (SPR), multiple pulse record (MPR) and none pulse record (NPR) were selected by visual inspection. Second, pulse characteristics were quantitatively identified using wavelet analysis method (WAM) and energy-based approach (EBA) to investigate if impulse ground motion identification method was applicable to MPR. Finally, a typical HPRB, located in the southern region of China, was adopted as the research object, the non-linear finite element model was established in OpenSees platform, and the non-linear seismic response analysis of the HPRB was carried out. The effects of MPR and SPR on the nonlinear seismic response of the HPRB were compared. The results obtained from the analyses indicate that the WAM and EBA are applicable to ground motions with only one dominant pulse in the velocity history, and are not applicable to multiple pulse ground motions. Near-fault MPRs and SPRs pose the risk of stronger damage to irregular high pier bridges than NPRs. Under MPR excitation, the top displacement of pier 1 and pier 2 is, respectively, 118.9% and 109.6% larger than under NPR excitation. The bending moment and the curvature at the bottom of the pier also increase. Near-fault MPR is found to produce pounding force and pounding times that are, respectively, 3−5 times and 2−3 times greater than those by NPR excitation. In the near field multiple pulse earthquake, the main beam is more likely to cause severe impact damage, and thus, the appropriate anti-collision measures should be adopted in seismic design.
-
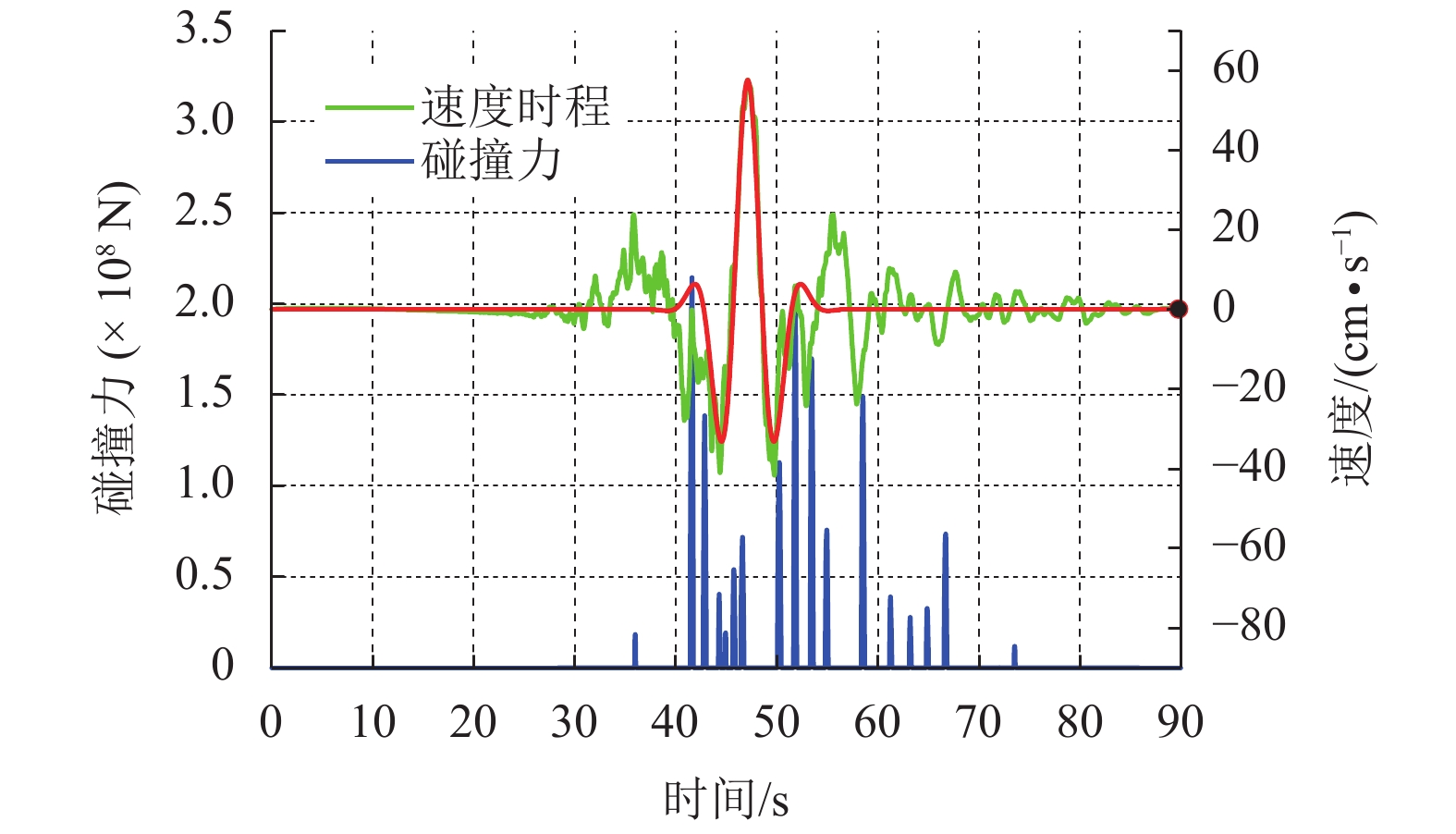
图 10 碰撞响应与速度脉冲的对应关系
Figure 10. Relationship between pounding response and velocity pulse
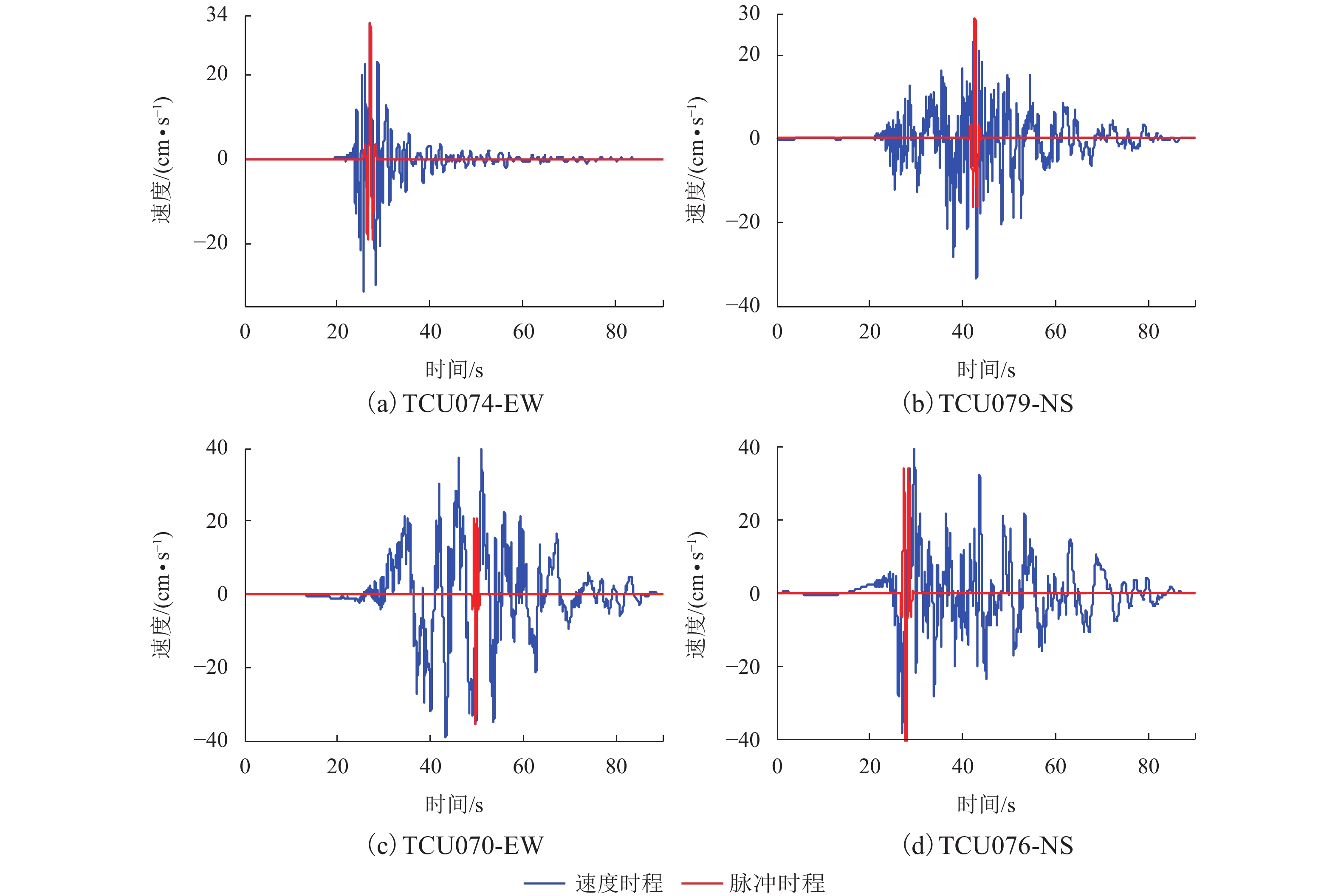
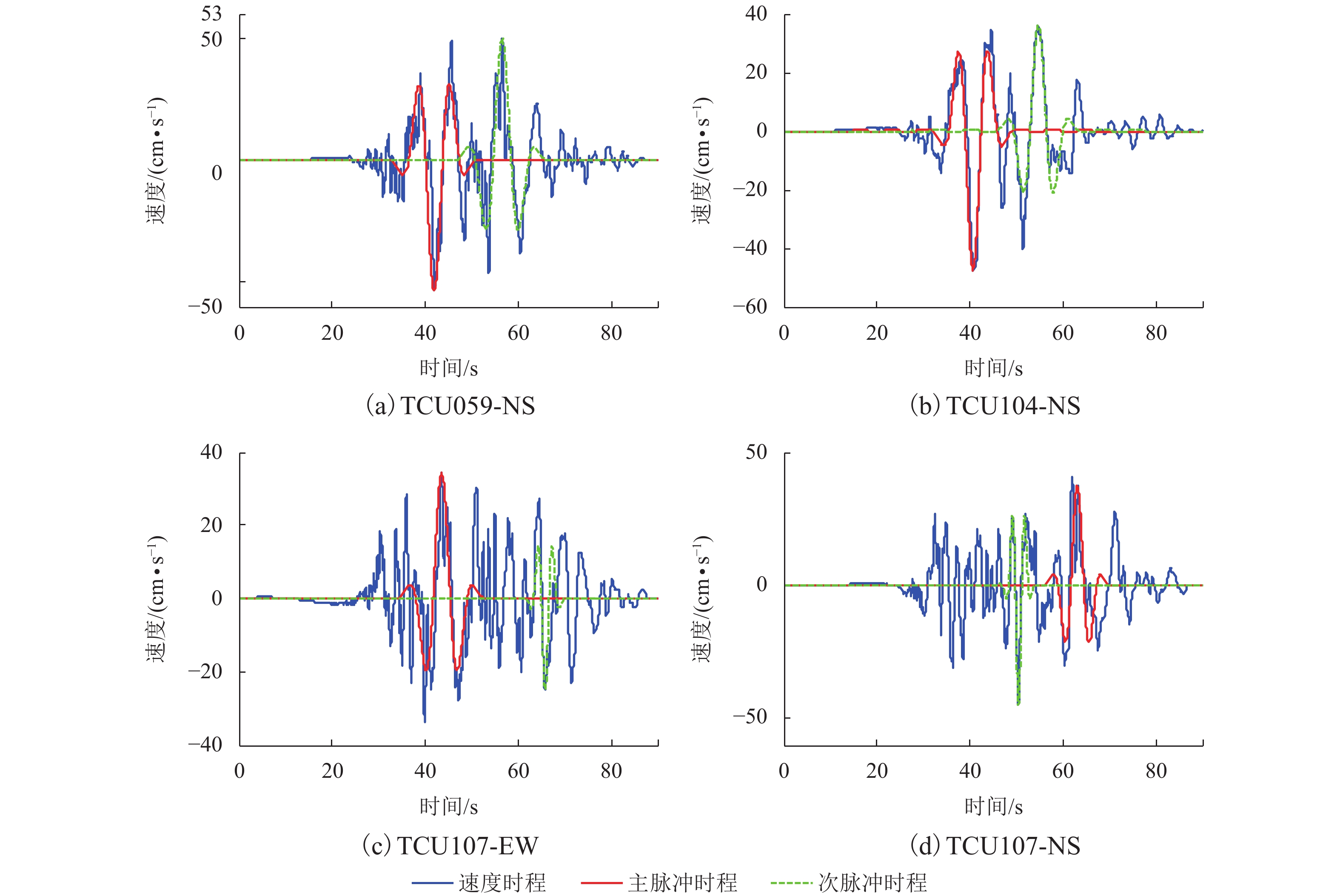
表 1 3类地震动详细信息
Table 1. Detail of selected three type ground motions
地震动类型 地震记录 Rrup/km PGA/(× g) SF Tp/s PI Ep 多脉冲 TCU059-NS 17.11 0.165 2.542 7.3 0.218 1 0.300 TCU104-NS 12.87 0.089 4.737 6.9 0.826 5 0.379 TCU107-EW 15.99 0.130 3.232 7.4 0.129 7 0.236 TCU107-NS 15.99 0.147 2.862 5.6 0.000 4 0.091 单脉冲 TCU031-EW 30.17 0.115 3.656 6.2 1.000 0 0.557 TCU036-EW 19.83 0.137 3.071 5.8 0.999 9 0.562 TCU040-EW 22.06 0.162 2.592 5.6 1.000 0 0.621 TCU049-EW 3.76 0.279 1.507 8.8 0.999 8 0.596 非脉冲 CHY074-EW 6.20 0.322 1.303 0.044 9 0.237 TCU079-NS 10.97 0.424 0.990 0.003 4 0.172 TCU070-EW 19.00 0.254 1.654 0.162 0 0.049 TCU076-NS 2.74 0.428 0.980 0.102 8 0.194  下载: 导出CSV
下载: 导出CSV
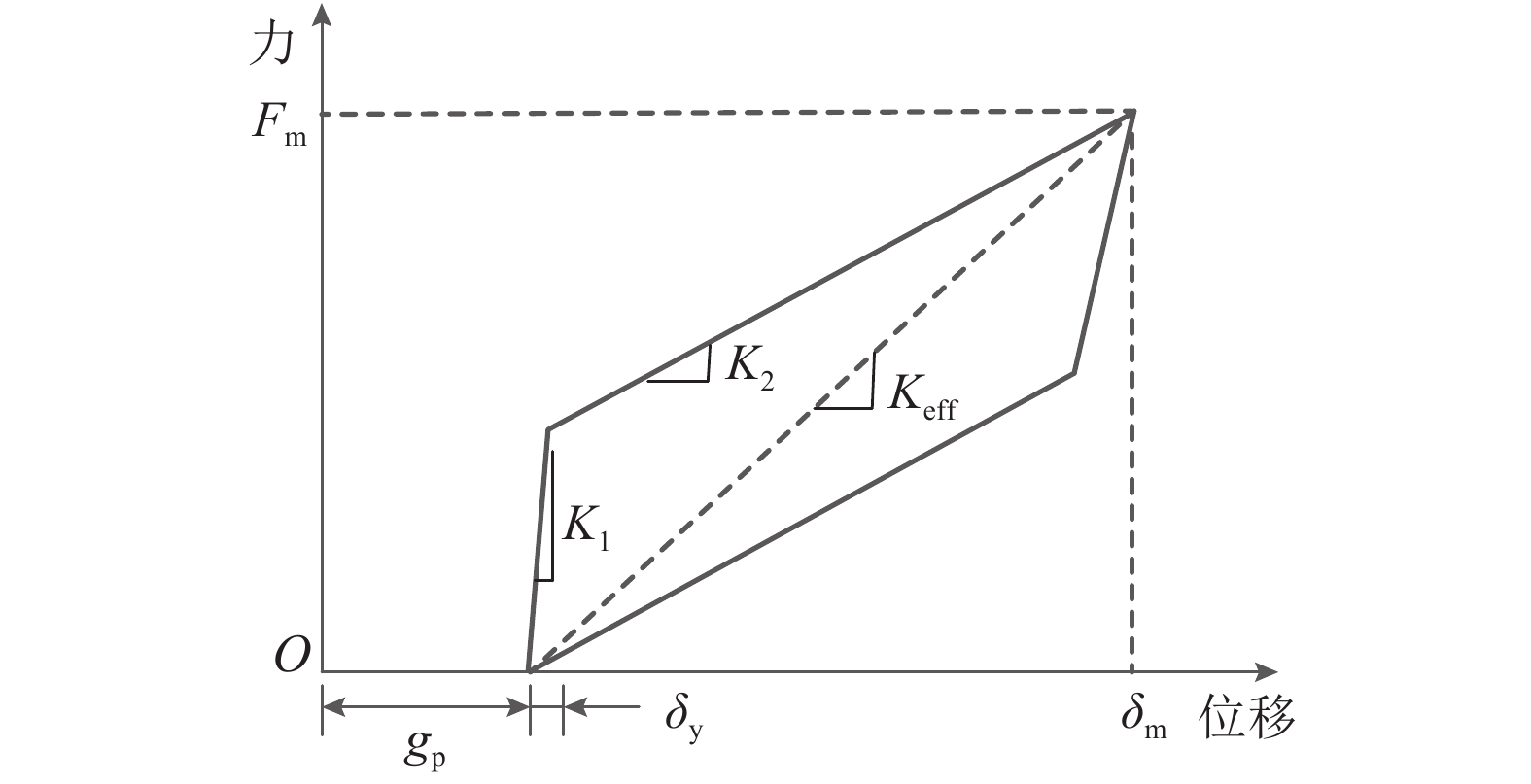
表 2 Hertz-Damp模型特征参数
Table 2. Properties of Hertz-Damp model
特征参数 取值 初始间隙gp/mm 100 屈服位移δy/mm 1.6 初始刚度K1/(kN•mm–1) 8 472 应变硬化刚度K1/(kN•mm–1) 2 916 等效刚度Keff/(kN•mm–1) 3 472 最大入侵位移δm/mm 16
下载: 导出CSV
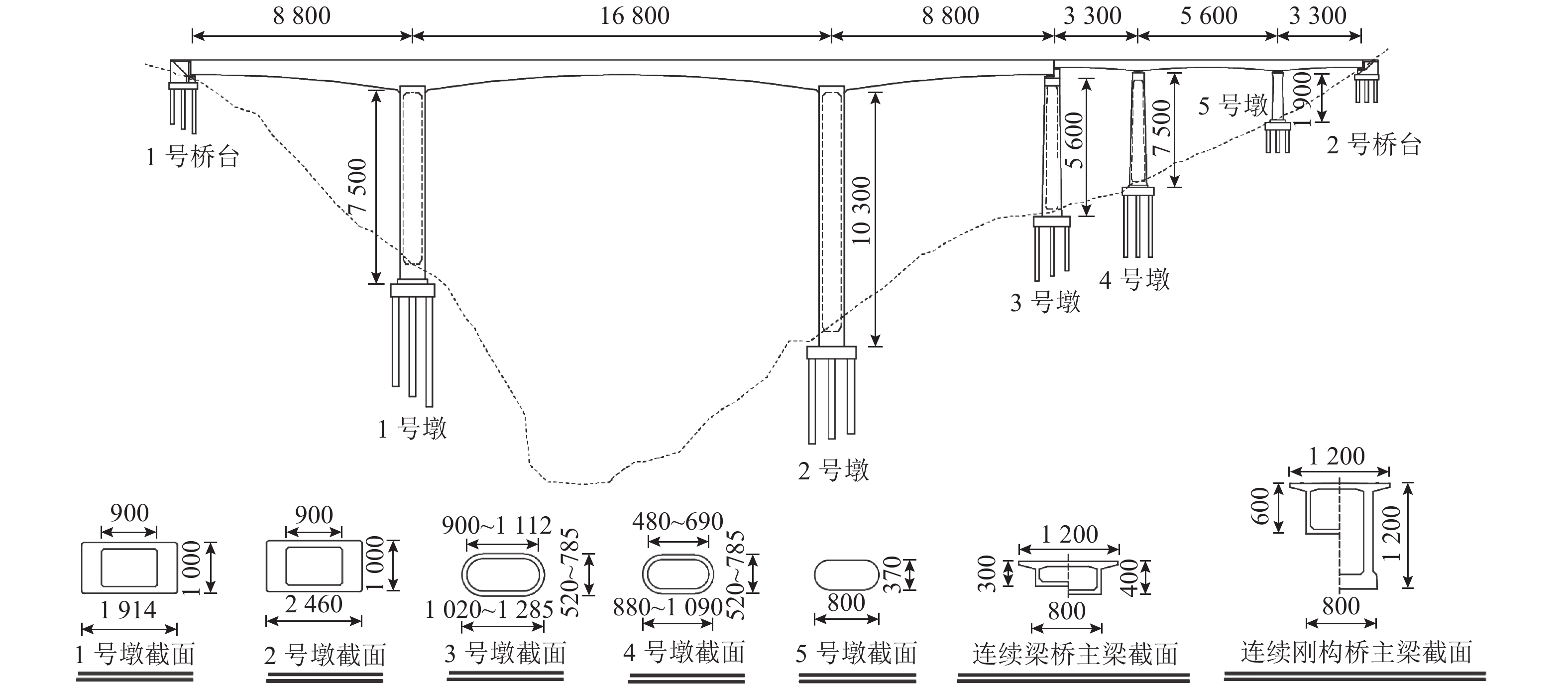
表 3 桥梁动力特性
Table 3. Dynamic characteristics of the selected bridge
振型阶数 周期/s 频率/Hz 质量参与系数/% 纵桥向 横桥向 第 1 阶 1.323 0.756 61.15 0 第 2 阶 1.278 0.783 0 40.92 第 3 阶 0.953 1.049 6.33 0 第 4 阶 0.902 1.108 0 0.56 第 5 阶 0.696 1.436 0.11 0 第 6 阶 0.688 1.454 0 15.65
下载: 导出CSV
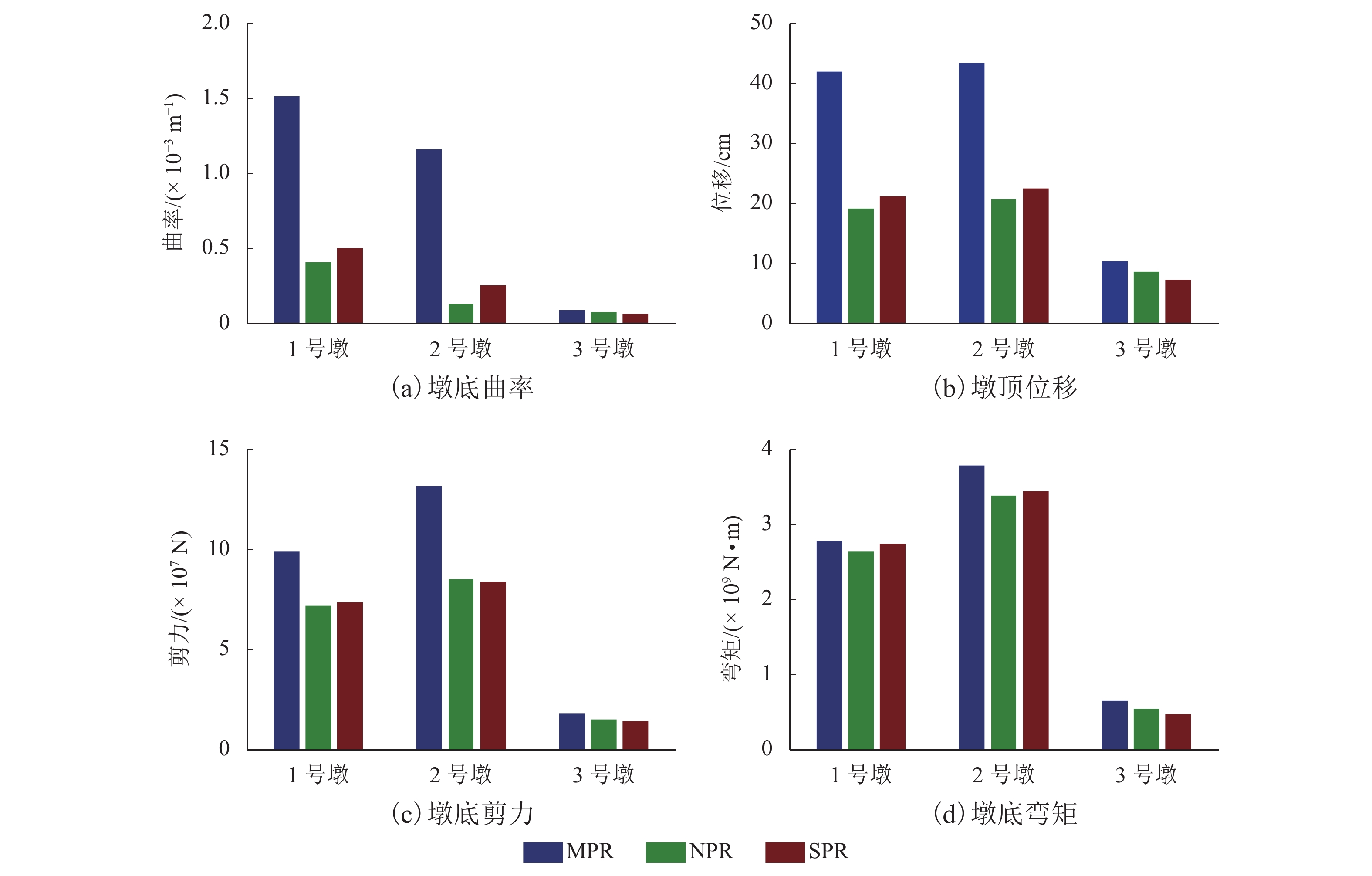
表 4 近断层脉冲效应对桥墩地震响应的放大系数
Table 4. Amplification factor of near-fault impulse effect on seismic response of pier
墩号 单一脉冲 多脉冲 曲率放大
系数位移放大
系数弯矩放大
系数剪力放大
系数曲率放大
系数放大系数
位移弯矩放大
系数剪力放大
系数1号 1.221 1.103 1.043 1.029 3.707 2.189 1.053 1.385 2号 1.926 1.085 1.019 0.983 8.924 2.096 1.119 1.543 3号 0.864 0.852 0.866 0.918 1.193 1.211 1.192 1.181
下载: 导出CSV
表 5 近断层脉冲效应对主梁碰撞响应的影响
Table 5. Details of maximum pounding force and average pounding frequency
脉冲类型 梁-台碰撞 梁-梁碰撞 梁-台碰撞 碰撞力/(× 107 N) 碰撞次数/次 碰撞力/(× 108 N) 碰撞次数/次 碰撞力/(× 108 N) 碰撞次数/次 多脉冲 29.70 32.50 3.67 23.00 32.50 27.75 单脉冲 8.73 9.95 1.41 9.00 8.56 7.25 非脉冲 9.67 5.50 1.15 5.25 10.60 5.00
下载: 导出CSV
-
梁智垚. 非规则高墩桥梁抗震设计理论研究[D]. 上海: 同济大学, 2007 JIA H Y, ZHANG D Y, ZHENG S X, et al. Local site effects on a high-pier railway bridge under tridirectional spatial excitations:nonstationary stochastic analysis[J]. Soil Dynamics & Earthquake Engineering, 2013, 52(6): 55-69. 陈旭,李建中,刘笑显. 墩身高阶振型对高墩地震反应影响[J]. 同济大学学报,2017,45(2): 159-166.CHEN Xu, LI Jianzhong, LIU Xiaoxian. Seismic performance of tall piers influenced by higher mode effects of piers[J]. Journal of Tongji University, 2017, 45(2): 159-166. 陈志伟,蒲黔辉,李晰,等. 行波效应对大跨连续刚构桥易损性影响分析[J]. 西南交通大学学报,2017,52(1): 23-29. doi: 10.3969/j.issn.0258-2724.2017.01.004CHEN Zhiwei, PU Qianhui, LI Xi, et al. Fragility analysis of large span continuous rigid bridge considering wave passage effect[J]. Journal of Southwest Jiao-tong University, 2017, 52(1): 23-29. doi: 10.3969/j.issn.0258-2724.2017.01.004 李立峰,吴文朋,胡思聪,等. 考虑氯离子侵蚀的高墩桥梁时变地震易损性分析[J]. 工程力学,2016,33(1): 163-170.LI Lifeng, WU Wenpeng, HU Sicong, et al. Time-dependent seismic fragility analysis of high pier bridge based on chlorideion induced corrosion[J]. Engineering Mechanics, 2016, 33(1): 163-170. 董俊,单德山,张二华,等. 非规则桥梁近、远场地震易损性对比分析[J]. 哈尔滨工业大学学报,2016,48(3): 159-165.DONG Jun, SHAN Deshan, ZHANG Erhua, et al. Near and far-field seismic fragility comparative analysis of irregular bridge[J]. Journal of Harbin Institute of Technology, 2016, 48(3): 159-165. 董俊,单德山,张二华,等. 非规则连续刚构桥地震易损性分析[J]. 西南交通大学学报,2015,50(5): 845-851. doi: 10.3969/j.issn.0258-2724.2015.05.012DONG Jun, SHAN Deshan, ZHANG Erhua, et al. Seismic fragility of irregular continuous rigid Frame bridge[J]. Journal of Southwest Jiaotong University, 2015, 50(5): 845-851. doi: 10.3969/j.issn.0258-2724.2015.05.012 MAVROEIDIS G P, DONG G, PAPAGEORGIOU A S. Near-fault ground motions,and the response of elastic and inelastic single-degree-of-freedom (SDOF) systems[J]. Earthquake Engineering & Structural Dynamics, 2004, 33(9): 1023-1049. YANG D, PAN J, LI G. Interstory drift ratio of building structures subjected to near-fault ground motions based on generalized drift spectral analysis[J]. Soil Dynamics & Earthquake Engineering, 2010, 30(11): 1182-1197. 潘毅,王晓玥,许浒,等. 脉冲型地震动作用下尼泊尔砖木遗产建筑易损性分析[J]. 西南交通大学学报,2017,52(6): 1156-1163.PAN Yi, WANG Xiaoyue, XU Hu, et al. Seismic fragility analysis of Nepalese brick-timber heritage structures under near-fault pulse-like ground motions[J]. Journal of Southwest Jiaotong University, 2017, 52(6): 1156-1163. BAKER J W. Quantitative classification of near-fault ground motions using wavelet analysis[J]. Bulletin of the Seismological Society of America, 2007, 97(5): 1486-1501. doi: 10.1785/0120060255 ZHAI C, CHANG Z, LI S, et al. Quantitative identification of near-fault pulse-like ground motions based on energy[J]. Bulletin of the Seismological Society of America, 2013, 103(5): 2591-2603. doi: 10.1785/0120120320 常志旺. 近场脉冲型地震动的量化识别及特性研究[D]. 哈尔滨: 哈尔滨工业大学, 2014 MAVROEIDIS G P. A mathematical representation of near-fault ground motions[J]. Bulletin of the Seismological Society of America, 2003, 93(3): 1099-1131. doi: 10.1785/0120020100 BRAY J D, RODRIGUEZ-MAREK A. Characterization of forward-directivity ground motions in the near-fault region[J]. Soil Dynamics & Earthquake Engineering, 2004, 24(11): 815-828. STEWART J P, CHIOU S J, BRAY J D, et al. Ground motion evaluation procedures for performance based design[J]. Soil Dynamics & Earthquake Engineering, 2002, 22(9): 765-772. IERVOLINO I, CORNELL C A. Probability of occurrence of velocity pulses in near-source ground motions[J]. Bulletin of the Seismological Society of America, 2008, 98(5): 2262-2277. doi: 10.1785/0120080033 CHANG Z, SUN X, ZHAI C, et al. An improved energy-based approach for selecting pulse-like ground motions[J]. Earthquake Engineering & Structural Dynamics, 2016, 45(14): 2405-2411. DICKINSON B W, GAVIN H P. Parametric statistical generalization of uniform-hazard earthquake ground motions[J]. Journal of Structural Engineering, 2011, 137(3): 410-422. doi: 10.1061/(ASCE)ST.1943-541X.0000330 MENEGOTTO M. Method of analysis for cyclically loaded RC plane frames including changes in geometry and non-elastic behavior of elements under combined normal force and bending[C]// Resistance and Ultimate Deformability of Structures Acted on by Well Defined Repeated Loads. Lisbon: IABSE, 1973: 15-22 KENT D C, PARK R. Flexural members with confined concrete[J]. Journal of the Structural Division, 1971, 97(7): 1969-1990. MUTHUKUMAR S. A contact element approach with hysteresis damping for the analysis and design of pounding in bridges[D]. Atlanta: Georgia Institute of Technology, 2003 李建中,宋晓东,范立础. 桥梁高墩位移延性能力的探讨[J]. 地震工程与工程振动,2005(1): 43-48. doi: 10.3969/j.issn.1000-1301.2005.01.008LI Jianzhong, SONG Xiaodong, FAN Lichu. Investigation for displacement ductility capacity of tall piers[J]. Journal of Earthquake Engineering and Engineering Vibration, 2005(1): 43-48. doi: 10.3969/j.issn.1000-1301.2005.01.008 李立峰,黄佳梅,吴文朋,等. 基于IDA的高墩大跨桥梁抗震性能评估[J]. 地震工程与工程振动,2012,32(1): 68-77.LI Lifeng, HUANG Jiamei, WU Wenpeng, et al. Research on the seismic performance of bridge with heath piers and long spans using increment dynamic analysis[J]. Journal of Earthquake Engineering and Engineering Vibration, 2012, 32(1): 68-77. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 841
- HTML全文浏览量: 386
- PDF下载量: 51
- 被引次数: 0