

Preliminary Investigation into Inversion of 2015 Mw7.8 Nepal Earthquake Based on GPS Data
-
摘要: 为了探索近场高频GPS资料在重特大地震实时发震特征反演方面的潜在作用和优势,独立使用2015年尼泊尔Mw7.8级地震震中附近的16个高频(1 Hz)GPS站点数据,基于动态数据处理技术、矩张量反演技术及跟踪方差技术,模拟实现了对该次地震的触发、实时矩心/矩张量的反演及地震事件结束判断等相关工作;结合GCMT、W-相位以及部分已公开发表成果,对反演过程及反演结果中存在的问题进行了对比分析;初步探讨了GPS同震位移场产品在节面判定中的潜在补充作用. 研究结果表明:本次地震破裂的传播方向主要为自西向东南单侧传播,平均传播速度约为3.1 km/s,地震持续时间至少为75 s;GPS数据反演得到的实时矩心及矩震级结果与GCMT、W-相位结果一致,且反演序列具有较高的稳定性和可靠性.Abstract: To explore the potential effect and advantage of near-field high rate GPS data on the real-time inversion of seismic characteristics of large earthquakes, 16 high rate GPS sites, affected by the 2015 Mw 7.8 Nepal earthquake, were utilized independently. The kinematic GPS data processing method, real-time moment tensor inversion algorithm, and trailing variance technique were used to replay the earthquake triggering, real-time centroid and moment tensor inversion, and ending judgement of the event. The problems found during the inversion and in the final results were discussed, and then compared to the GCMT, W-phase, and some already published results. The potential advantage of a GPS real-time displacement field in determining these parameters was explored. The GPS time series shows that, if rupture propagation is in one direction and is from west to southeast, the average speed is about 3.1 km/s and the duration of the event is at least 75 s. All these results are consistent with previously published findings. GPS derived centroid and moment magnitude values are consistent with GCMT and W-phase results and have high stability and reliability.
-
Key words:
- high rate GPS /
- inversion /
- real time /
- seismic characteristics /
- Nepal earthquake
-
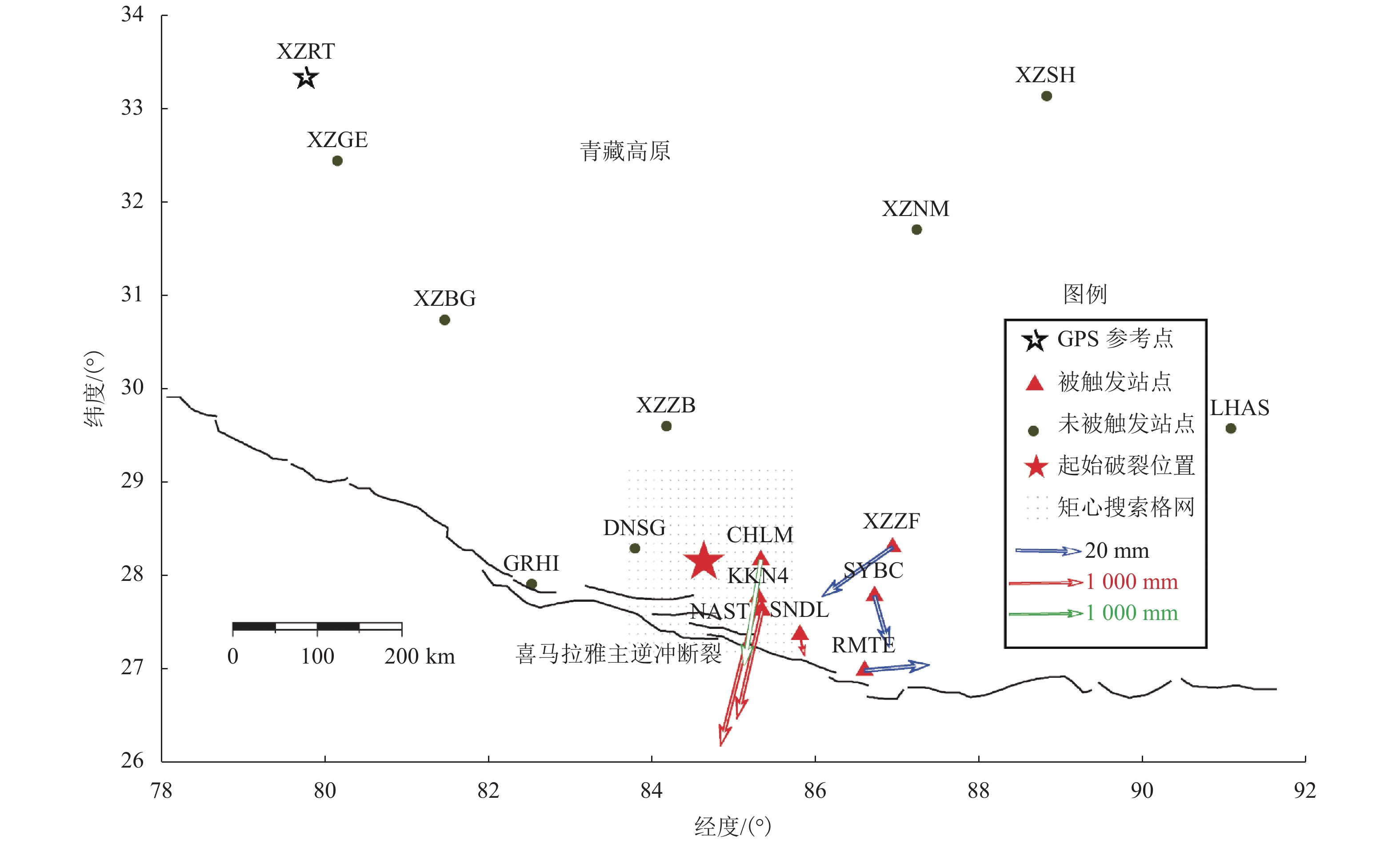
图 1 GPS点位及同震位移分布
Figure 1. Distribution map of the utilized GPS sites and their corresponding co-seismic slip

图 2 GPS站点(1 Hz)坐标时间序列(起止时间为GPS时间06:10:00 — 06:16:00)
Figure 2. Coordinate time series of GPS (1 Hz) stations (from 06:10:00 to 06:16:00,GPS time)
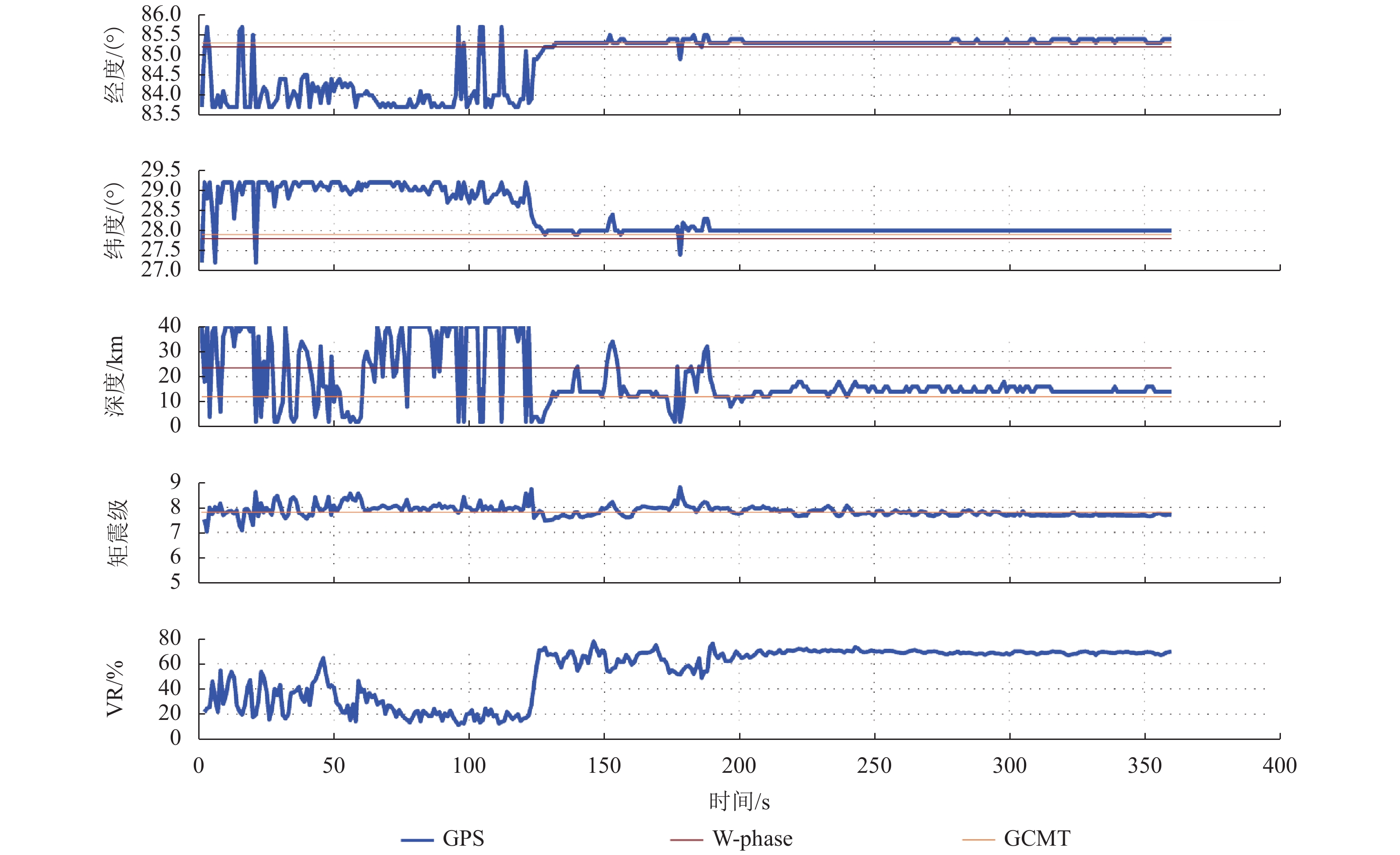
图 3 基于GPS技术反演得到的矩心经度、纬度、深度、矩震级及方差缩减量序列
Figure 3. GPS-derived centroid longitude,latitude,and depth,moment magnitude,and variance reduction
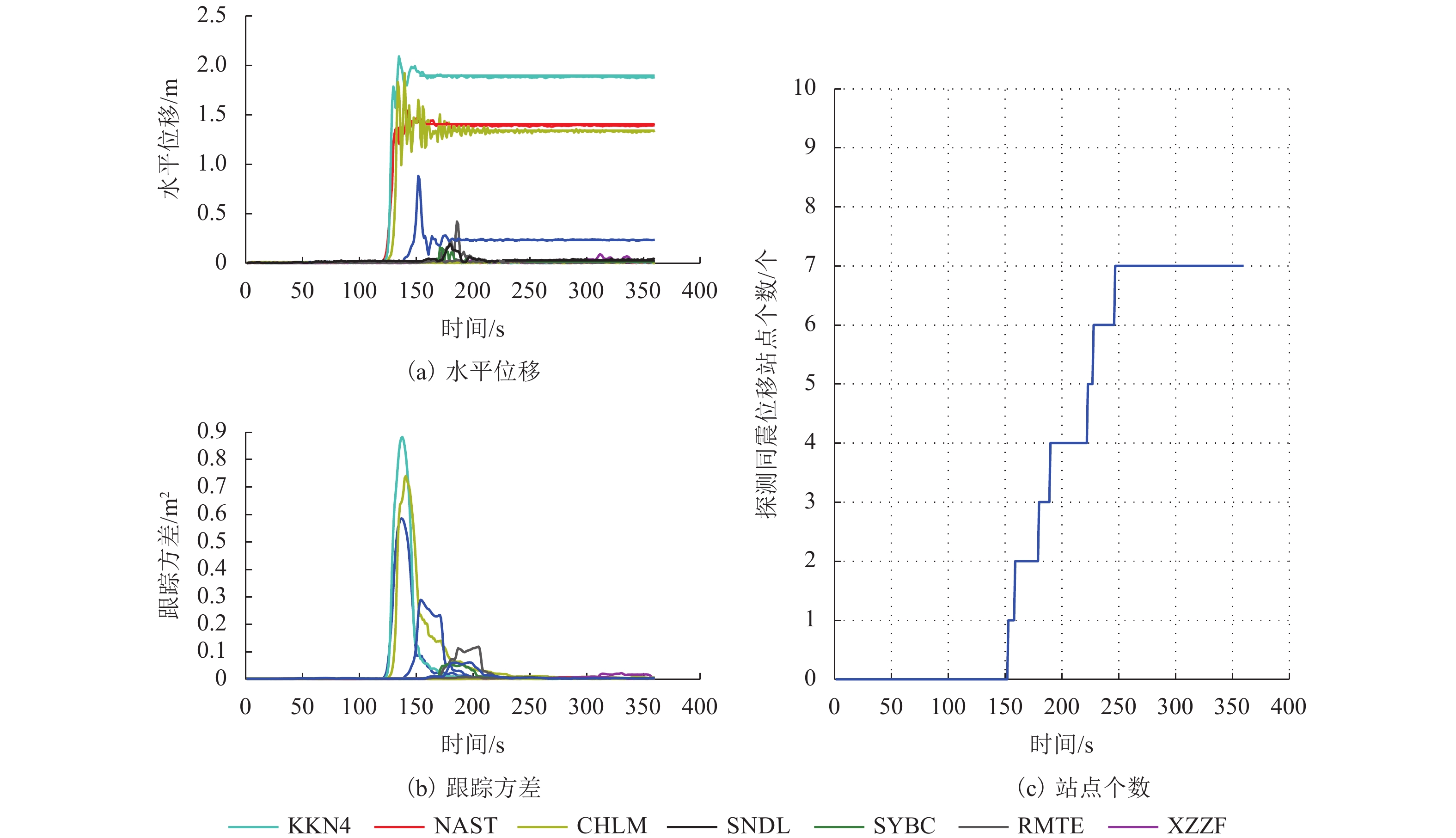
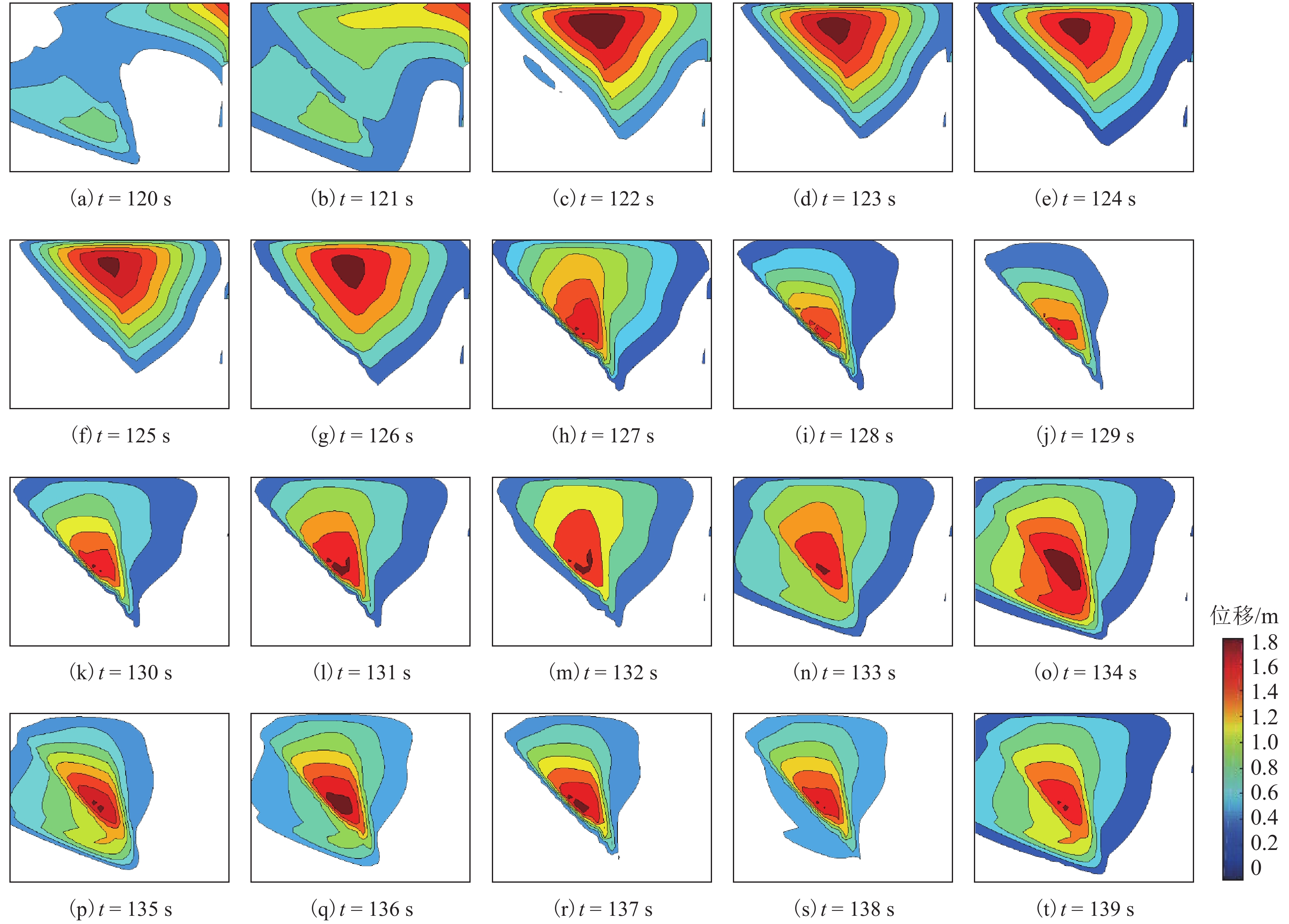
图 4 基于跟踪方差技术探测地震事件结束及获取GPS同震位移
Figure 4. Trailing variance technique-based seismic event ending detection and the calculation of co-seismic GPS displacement
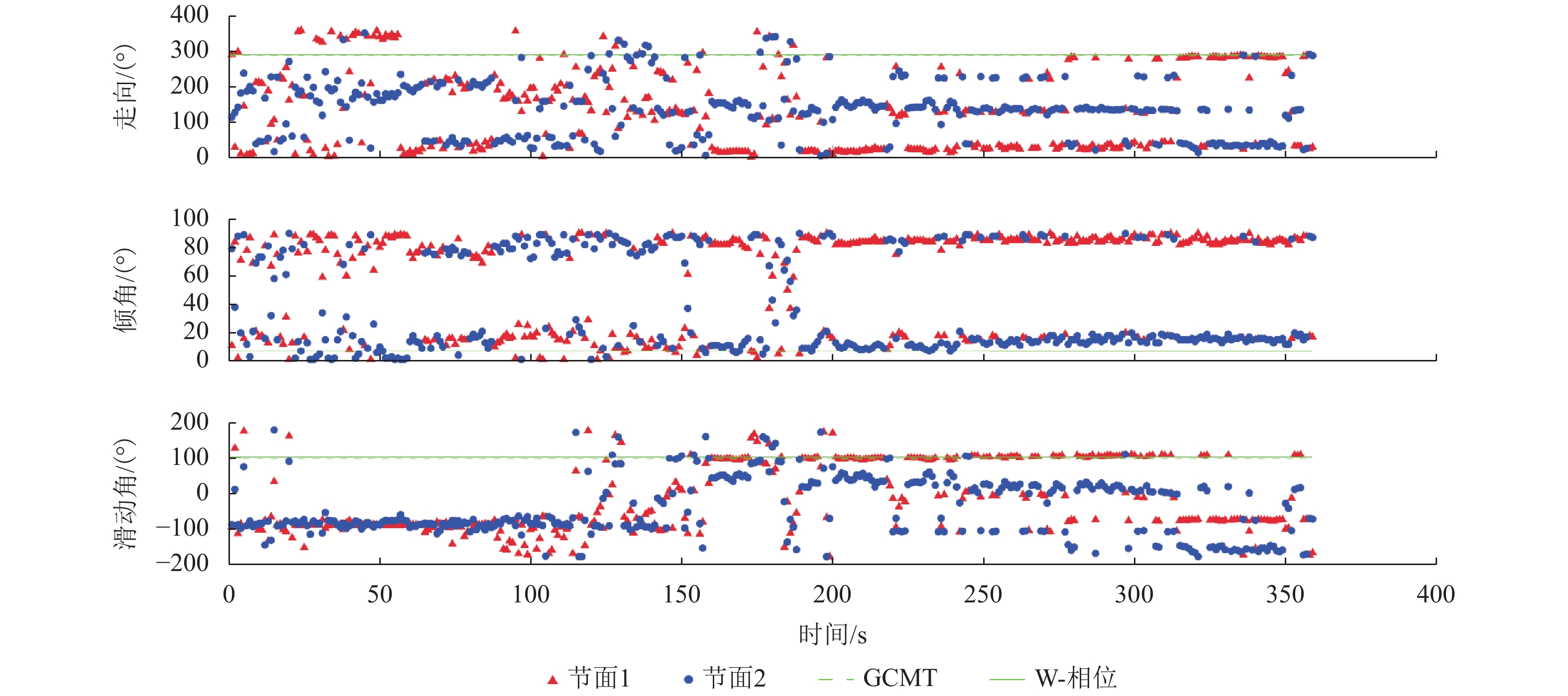
图 5 震源机制节面解及其与GCMT(绿色虚线)、W-相位结果(绿色实线)的比较
Figure 5. Nodal plane solutions of focal mechanism and comparisons with GCMT (dashed green line) and W-phase (solid green line) results
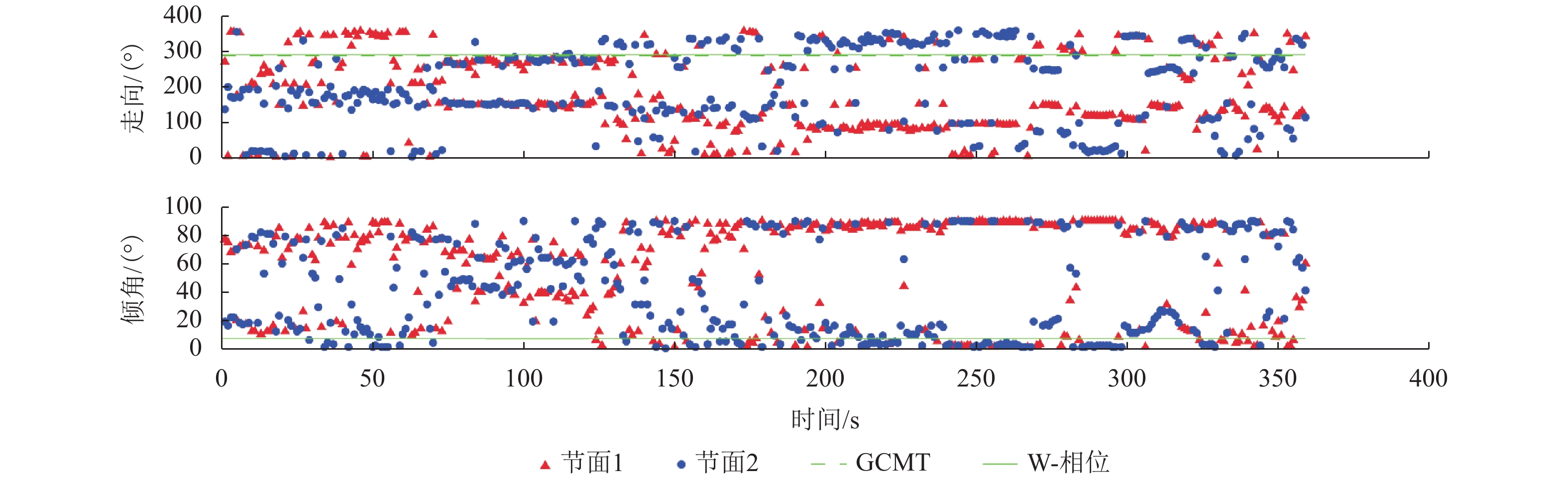
图 6 KKN4站点删除后,得到的震源机制节面解的几何参数及与GCMT(绿色虚线)、W-相位结果(绿色实线)的比较
Figure 6. Nodal plane solutions of focal mechanism with the GPS site KKN4 excluded,and comparisons with GCMT (dashed green line) and W-phase (solid green line) results
-
AVOUAC J P, MENG L S, WEI S J, et al. Lower edge of locked Main Himalayan Thrust unzipped by the 2015 Gorkha earthquake[J]. Nature Geoscience, 2015, 8(9): 45-58. GRANDIN R, VALLÉE M, SATRIANO C, et al. Rupture process of the Mw=7.9 2015 Gorkha earthquake (Nepal):insights into Himalayan megathrust segmentation[J]. Geophysical Research Letters, 2016, 42(20): 8373-8382. GALETZKA J, MELGAR D, GENRICH J F, et al. Slip pulse and resonance of the Kathmandu basin during the 2015 Gorkha earthquake,Nepal[J]. Science, 2015, 349(6252): 1091-1095. doi: 10.1126/science.aac6383 刘刚,王琪,乔学军,等. 用连续GPS与远震体波联合反演2015年尼泊尔中部MS8.1地震破裂过程[J]. 地球物理学报,2015,58(11): 4287-4297.LIU Gang, WANG Qi, QIAO Xuejun, et al. The 25 April 2015 Nepal MS8.1 earthquake slip distribution from joint inversion of teleseismic,static and high-rate GPS data[J]. Chinese Journal Geophysics, 2015, 58(11): 4287-4297. 单新建,张国宏,汪驰升,等. 基于InSAR和GPS观测数据的尼泊尔地震发震断层特征参数联合反演研究[J]. 地球物理学报,2015,58(11): 4266-4276.SHAN Xinjian, ZHANG Guohong, WANG Chisheng, et al. Joint inversion for the spatial fault slip distribution of the 2015 Nepal MW7.9 earthquake based on InSAR and GPS observations[J]. Chinese Journal Geophysics, 2015, 58(11): 4266-4276. 张勇,许力生,陈运泰. 2015年尼泊尔Mw7.9地震破裂过程:快速反演与初步联合反演[J]. 地球物理学报,2015,58(5): 1804-1811.ZHANG Yong, XU Lisheng, CHEN Yuntai. Rupture process of the 2015 Nepal Mw7.9 earthquake:fast inversion and preliminary joint inversion[J]. Chinese Journal Geophysics, 2015, 58(5): 1804-1811. 张旭,许力生. 利用视震源时间函数反演尼泊尔MS8.1地震破裂过程[J]. 地球物理学报,2015,58(6): 1881-1890.ZHANG Xu, XU Lisheng. Inversion of the apparent source time functions for the rupture process of the Nepal MS8.1 earthquake[J]. Chinese Journal Geophysics, 2015, 58(6): 1881-1890. 刘志鹏,盖增喜. 利用多台阵压缩传感方法反演尼泊尔MW7.9地震破裂过程[J]. 地球物理学报,2015,58(6): 1891-1899.LIU Zhipeng, GAI Zengxi. Rupturing process of the MW7.9 Nepal earthquake inverted by the multi-array compressive sensing method[J]. Chinese Journal Geophysics, 2015, 58(6): 1891-1899. DUPUTEL Z, RIVERA L, KANAMORI H, et al. Real-time W phase inversion during the 2011 off the Pacific coast of Tohoku earthquake[J]. Earth,Planets and Space, 2011, 63(7): 535-539. BOCK Y, MELGAR D, BRENDAN W C, et al. Replay of the 2011 Mw9.0 great east Japan earthquake in simulated real-time mode with integrated 1 Hz GPS and 100 Hz accelerometer data for rapid source characterization,earthquake response spectra and tsunami prediction[J]. 2011 Great East Japan Earthquake, 2012, 4(1): 580-592. SINGH S K, PÉREZ-CAMPOS X, IGLESIAS, et al. A method for rapid Estimation of moment magnitude for early tsunami warning based on coastal GPS networks[J]. Seism. Res. Lett., 2012, 83(3): 516-530. doi: 10.1785/gssrl.83.3.516 MELGAR D. Seismogeodesy and rapid earthquake and tsunami source assessment[D]. Dissertation: UC San Diego, 2014 BOORE D M, JOYNER W B, FUMAL T E. Equations for estimating horizontal response spectra and peak acceleration from western North American earthquakes:a summary of recent work[J]. Seismological Research Letters, 1997, 68(1): 128-153. doi: 10.1785/gssrl.68.1.128 BOORE D M. Effect of baseline corrections on response spectra for two recordings of the 1999 Chi-Chi,Taiwan,earthquake[J]. U. S. Geol. Surv. Open-File Rept., 1999, 99(545): 1-37. MELGAR D, BOCK Y, CROWELL B W. Real-time centroid moment tensor determination for large earthquakes from local and regional displacement records[J]. Geophysical Journal International, 2012, 188(2): 703-718. doi: 10.1111/gji.2012.188.issue-2 HERRING T A, KING R W, MCCLUSKY S C. GLOBK: global Kalman filter VLBI and GPS analysis program, release 10.4[M]. [S.l.]: Mass. Instit. of Technol, Cambridge, 2010: 5-20 WANG R, MARTIN F L, ROTH F. Computation of deformation induced by earthquakes in a multi-layered elastic crust:FORTRAN programs EDGRN/EDCMP[J]. Computers & Geosciences, 2003, 32(10): 1817-1817. LASKE G, MASTERS G, MA Z, et al. Update on CRUST1.0-A 1-degree global model of earth’s crust[J]. Egu General Assembly Conference, 2013, 15(4): 52-89. WRIGHT T J, HOULIÉ N, HILDYARD M, et al. Real-time,reliable magnitudes for large earthquakes from 1 Hz GPS precise point positioning:the 2011 Tohoku-Oki (Japan) earthquake[J]. Geophysical Research Letters, 2012, 39(12): 12-102. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 616
- HTML全文浏览量: 327
- PDF下载量: 2
- 被引次数: 0