

Lane Line Detection and Recognition by Polarisation Imaging
-
摘要: 复杂环境下的车道检测是目前智能车和辅助安全驾驶研究的难点和热点. 针对外部复杂的道路环境,将光学偏振理论引入传统的车道检测技术,提出了一种基于成像偏振的车道线检测方法. 通过对车道线图像基本特征的分析,首先采集3个角度的特殊环境道路偏振图像,获得偏振度图像;然后对偏振度图像作二值化和图像感兴趣区域的划分;再根据车道线边缘的直线特性,进行道路图像的边缘检测从而可以获得车道边缘;最后通过Hough变换原理提出了改进的Hough算法,并得以实现检测出车道标线,计算出汽车行驶偏角. 通过仿真和实验验证表明,该方法能够准确地检测和识别出复杂环境下的车道线,车道线的检测偏角与实际偏角之间的误差小于0.3°.Abstract: The detection of lane lines in an adverse environments is a complex and popular topic in both assisted safe driving and intelligent vehicle research. An optical polarization theory was introduced into traditional lane detection technology, aimed at external adverse road environments. In addition, a lane-line detection method was proposed based on imaging polarization by analysing the basic features of the lane line image. Firstly, a three-angle special environment road polarization-image was collected to obtain a polarization degree image. Secondly, the polarization degree images were converted by binarization, divided first into regions of interest, and then according to the straight-line feature of the lane edge before the edge detection of road images were conducted; hence, the actual lane line edge could be obtained. Finally, the improved Hough algorithm proposed through the Hough transform principle could detect the lane marking; and the vehicle driving deflection angle was calculated. The simulation and experimental results demonstrate this method can accurately detect and identify the lane line in an adverse environment with an error of less than 0.3° between the detected and actual declination angle of the lane line.
-
Key words:
- adverse environments /
- lane line detection /
- Hough transformation /
- polarization imaging
-
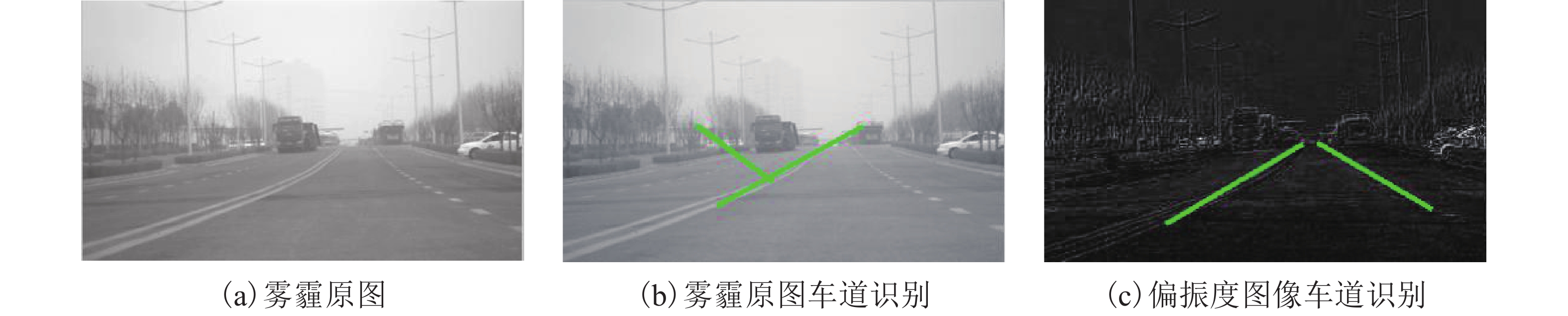
图 8 原图与偏振度图像车道识别对比
Figure 8. Lane recognition contrast of original image and polarization degree image
表 1 车道线检测实验数据结果
Table 1. Lane line detection experimental data
序号 车道线检测偏角 与实际偏角偏差 1 3.059 0.159 2 5.148 0.052 3 9.258 0.258 4 11.847 0.247 5 17.560 0.066 6 20.773 0.173 7 24.365 0.035 8 30.294 0.094  下载: 导出CSV
下载: 导出CSV
-
戎辉,龚进峰,何佳,等. 智能安全车辆技术前沿跟踪[J]. 交通信息与安全,2010,28(4): 93-98. doi: 10.3963/j.ISSN1674-4861.2010.04.022RONG Hui, GONG Jinfeng, HE Jia, et al. Intelligent safe vehicle technology:an introduction to its history and state-of-the-art[J]. Journal of Transport Information, 2010, 28(4): 93-98. doi: 10.3963/j.ISSN1674-4861.2010.04.022 王国华. 道路交通事故的防范[J]. 城市与减灾,2012(1): 43-45. doi: 10.3969/j.issn.1671-0495.2012.01.015 KUSANO D K, GABLER C H. Comparison of expected crash and injury reduction from production forward collision and lane departure warning systems[J]. Traffic Injury Prevention, 2015, 16(2): 109-114. doi: 10.1080/15389588.2014.909594 贾立山. 体现驾驶员特性的车道偏离预警系统关键技术研究[D]. 武汉: 华中科技大学, 2011 CLANTON J M, BEVLY D M, HODEL A S. A low-cost solution for an integrated multisensor lane departure warning system[J]. IEEE Transactions on Intelligent Transportation Systems, 2009, 10(1): 47-59. doi: 10.1109/TITS.2008.2011690 朱瑜辉. 基于大气散射模型的雾霾天道路图像清晰化[D]. 北京: 北京工业大学, 2010 马小龙. 基于视觉的复杂光照条件下的车道检测及识别[D]. 成都: 电子科技大学, 2013 LIN C, SHEN X, XU Q. Optical image encoding based on digital holographic recording on polarization state of vector wave[J]. Applied Optics, 2013, 52(28): 6931-6939. doi: 10.1364/AO.52.006931 刘敬,夏润秋,金伟其,等. 基于斯托克斯矢量的偏振成像仪器及其进展[J]. 光学技术,2013,39(1): 56-62.LIU Jing, XIA Runqiu, JIN Weiqi, et al. Review of imaging polarimetry based on Stokes vector[J]. Optical Technique, 2013, 39(1): 56-62. LEFAUDEUX N, BREUGNOT S, CLEMENCEAU P. Compact and robust linear Stokes polarization camera[J]. Proceedings of SPIE, 2008, 6972(1): 379-405. 唐珮珺,陈飞虎,唐志列. 偏振态的可视化及其成像技术的研究[J]. 光学学报,2013,33(8): 235-241.TANG Peijun, CHEN Feihu, TANG Zhilie. Visualization of polarization state and its imaging method[J]. Acta Optica Sinica, 2013, 33(8): 235-241. 孙思思. 基于机器视觉的车道线检测和识别技术的研究与实现[D]. 沈阳: 东北大学, 2013 CUI Shiyong, YAN Qin, REINARTZ Peter. Complex building description and extraction based on Hough transformation and cycle detection[J]. Remote Sensing Letters, 2012, 3(2): 151-159. doi: 10.1080/01431161.2010.548410 ISLAM M S, CHONG U P. Improvement in moving target detection based on hough transform and wavelet[J]. Iete Technical Review, 2015, 32(1): 46-51. doi: 10.1080/02564602.2014.978398 王竞雪,朱庆,王伟玺,等. 结合边缘编组的Hough变换直线提取[J]. 遥感学报,2014,18(2): 378-389.WANG Jingxue, ZHU Qing, WANG Weixi, et al. Straight line extraction algorithm by Hough transform combining edge grouping[J]. Journal of Remote Sensing, 2014, 18(2): 378-389. BRAHIM N, BRAHIM M, BILEL F. Agent-based hough transform:a way to the improvement of the execution time in the detection of the dominant straight line in an image[J]. International Journal of Computer Applications, 2010, 11(2): 24-28. KONG H, AUDIBERT J Y, PONCE J. Vanishing point detection for road detection[C]//Proceedings of the Computer Vision and Pattern Recognition. Paris: IEEE, 2009: 96-103 王影. 基于边缘的车道线识别算法的研究与实现[D]. 沈阳: 东北大学, 2008 于兵,张为公,龚宗洋. 基于机器视觉的车道偏离报警系统[J]. 东南大学学报 (自然科学版),2009,39(5): 928-932. doi: 10.3969/j.issn.1001-0505.2009.05.012YU Bing, ZHANG Weigong, GONG Zongyang. Lane departure warning system based on machine vision[J]. Journal of Southeast University (Natural Science Edition), 2009, 39(5): 928-932. doi: 10.3969/j.issn.1001-0505.2009.05.012 -

 下载:
下载:



 点击查看大图
点击查看大图

图(8) / 表(1)
计量
- 文章访问数: 522
- HTML全文浏览量: 314
- PDF下载量: 12
- 被引次数: 0