

Fuzzy-optimal Control of Four-Wheel Independent Steering Vehicles
-
摘要: 为改善四轮独立转向(4WIS)车辆的操纵稳定性,在设计了4WIS模型跟踪最优控制器的基础上,对最优控制参数对控制性能的影响以及4WIS车辆转向动力学特性进行了分析,提出了一种基于车辆转向状态的最优控制器参数调整策略,并设计了模糊逻辑控制参数调节器,实现最优控制器参数的自适应调整.结合4WIS车辆的八自由度动力学模型对提出的模糊最优控制系统进行仿真实验分析,结果表明:设计的4WIS模糊最优控制系统能够极大地改善车辆的稳定性与安全性;在高速低附着系数的极限工况下,该系统仍然够能保证车辆的理想转向状态.该系统对于强侧向风一类的侧向干扰具有很强的抑制能力;风速90 km/h的强侧风且无驾驶员干预情况下,车辆在320 m行驶距离内,侧向偏移量仅为0.78 m.Abstract: A fuzzy-optimal control method was proposed to improve the handling stability of four-wheel independent steering (4WIS) vehicles. Upon completion of the optimal controller designing, the influence of optimal control parameters on control performance and the dynamic characteristic of 4WIS vehicles were analyzed, and a control parameters adjustment strategy based on the vehicle steering state was proposed. By using fuzzy control theory, a fuzzy logic control parameter adjuster was put forward, which can achieve the self-adjustment of optimal control parameters. Simulation experiments were done by using an eight-degree-of-freedom dynamic model of 4WIS vehicle. The simulation results show that the proposed fuzzy-optimal controller can effectively improve the handling stability and safety of 4WIS vehicles. The ideal steering states can be guaranteed even under high speed and low adhesion conditions. Moreover, the proposed controller also provides a good robustness to reject strong cross-wind disturbance, which ensure the vehicle safety under lateral disturbance. In the conditions of strong cross-wind (with a speed of 90 km/h) disturbance and without driver intervention, the lateral deviation of 4WIS vehicle under the control of the proposed system is only 0.78 m at a driving distance of 320 m.
-
Key words:
- vehicle engineering /
- 4WIS /
- stability control /
- fuzzy-optimal control
-
近年来,随着气候环境的急剧变化,自然灾害发生的规模在频度和强度上呈现出愈发增强的趋势[1- 2].尤其是2008年我国南方发生的特大冰雪灾害,其持续时间达两月之久,给当时的交通设施造成了巨大损失.针对自然灾害这种发生随机性大、造成损失强的特点,国家十三五发展规划中明确指出,将多种灾害作用下的灾害风险研究作为优先发展领域. 因此,对灾害风险领域的研究,尤其是开展区域性灾害风险评估是现阶段灾害风险研究的重要组成部分,已成为保障国家健康、高速和可持续发展中不可或缺的一环[3].
现有的交通气象灾害风险研究中,对于雪灾风险的关注点主要在降雪及其导致的路面结冰上[4-7],对伴生性灾害如降雪过程中及降雪后所出现的风吹雪现象对交通的影响研究较少,且主要集中在风吹雪灾害发生机理及演变机制上[8-10],对于寒区这种伴生性灾害的区域性评估并不多见.
因此,针对风吹雪灾害对寒区交通正常运转造成的影响,本研究以风吹雪灾害的发生机理及演变过程为基础,开展区域性交通系统网的风吹雪灾害风险评估,为寒区交通系统的正常运行和相应的防灾减灾工作提供参考.
1. 技术路线及数据来源
1.1 技术路线
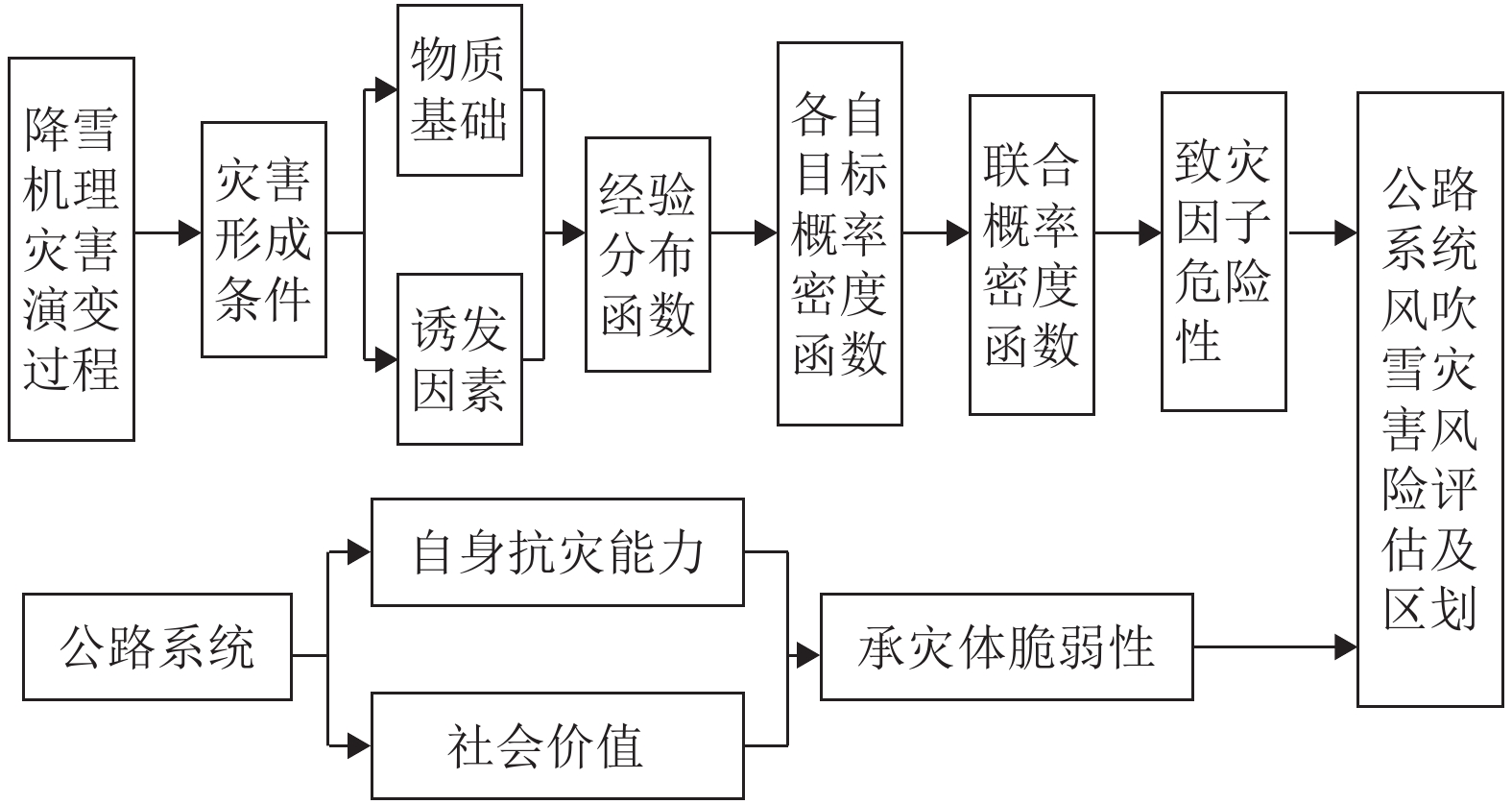
对于长时期的雪灾险情,本文尝试建立以月为时间单位的灾害风险评估体系. 首先,从降雪形成的内在机理和风吹雪灾害的演变过程出发探究灾害发生条件,并从灾害发生条件构建宏观影响指标;基于灾害影响因素和灾害发生结果的对应性原则,以影响因素同时发生的概率来表示在此特定条件下风吹雪灾害发生的可能性;结合GIS (geographic information system)技术平台,在研究区交通系统网脆弱性分析的基础上,开展黑龙江省交通系统网的风吹雪灾害风险评估,并完成区域性公路系统网风险区划图的构建. 基于概率分析的风吹雪灾害风险研究技术路线如图1所示.
1.2 数据来源
本文使用的是该研究区内1998—2019年间各市风速和降雪等天气数据,数据来源于黑龙江省统计局和黑龙江省气象信息中心. 地图矢量数据和栅格数据来源于地理空间数据云和国家地理信息系统网.
2. 灾害形成机理
风吹雪是寒区公路雪灾的一种典型表现形式,系风携带雪粒在空气中运动的一种天气现象[11]. 作为我国最北部省份,黑龙江省公路每年都会受到风吹雪灾害的影响. 陈长胜等[12]从气候学角度对该地区的降雪进行了分析,指出东北区的暴雪天气是由于北方强冷空气与山东半岛上空气旋及东侧暖湿气流在东北地区相遇而形成的.
降雪的量值和分布为风吹雪灾害的形成提供了物质基础. 同时,一场降雪事件能否演变为一种灾害不仅和降雪量的多少有关,还取决于降雪时的气候环境和应对降雪时承灾体的抗灾能力[8]. 席剑锋等[8-9]通过系统地总结公路风吹雪及积雪形成机理的有关理论指出,风速是风吹雪灾害形成的重要影响因子,决定着风吹雪事件的发展方向和运动规律.
公路风吹雪灾害的主要表现形式:一种是风吹雪积雪对公路的掩埋;二是分布在路面上或空气中的雪粒子在风力作用下对行车视线的影响. 在冬季,无风或风力弱小的情况下,自然降雪会在高寒地区形成等厚的积雪层[13]. 随着风力的增强,空气中的雪粒子则会产生较大的移动速度,这不仅影响行车驾驶员的视线,同时还会改变行车间的气流分布,导致行车不稳;而地面积雪则会在风速作用下发生位置状态的改变,使道路交通逐渐向路基掩埋、路面覆雪的状态发展[10]. 在降雪增加、风速增强的这一过程中,处于该环境中的交通车辆所面临的风险也是从无到有并向不断增强的方向发展.
从风吹雪灾害的发展及演变过程出发,灾害形成与否主要与降雪量的多少、降雪期所处的气候环境有关. 同时,从作用对象上讲还取决于承灾体的复杂性. 在此,基于灾害风险系统的组成要素[2, 5, 14],将这些指标对灾害的评估划分为致灾因子的危险性评估和承灾体的脆弱性评估两大部分.
3. 致灾因子危险性评估
3.1 危险性指标及数据处理
一场降雪能否成灾是多种因素的综合体现. 其中,风是风吹雪形成的动力条件[8]. 通过分析风吹雪灾害演变过程,并结合风吹雪过程中多年相关环境资料的统计,将降雪量作为寒区公路系统风吹雪灾害形成的物质基础. 针对公路系统尤其是高速公路中常见的风吹雪现象,从致灾因子形成的激励情况出发,将风速大小作为风吹雪灾害的诱发条件.
在数据选取及处理方法上,考虑到灾害数据在时间上的有效性[15],本次选用1998—2019年间每年的11月到次年3月的数据,依据大数定律频率稳定性思想,以频率作为概率,对455个样本数据的累积概率进行经验分布函数的拟合. 经函数检验后,将得到的经验分布函数进行微分,获得相应影响因素的目标概率密度函数.
通过对累积概率经验分布函数的拟合,不仅可以缩小拟合函数的选取范围,控制拟合效果,而且通过先拟合再微分的方式得到的目标函数还可在微分过程中进一步缩小目标函数的误差,确保目标概率密度曲线的优越性.
3.2 致灾因子危险性分析
对灾害事件的危险性评估即是分析不同强度灾害事件发生的可能性,可用危险强度H来衡量[2, 5]. 本次从灾害形成的物质基础和诱发因素出发,以灾害影响因素发生的可能性来间接反映灾害事件发生的可能性,进而探究寒区公路系统典型气象灾害的危险性. 在此基础上,利用GIS空间分析功能进行灾害危险性区划,可在一定程度上提高灾害危险性评估的准确性[16].
1) 风吹雪灾害发生的物质基础
当冬季发生降雪时,降雪量的多少是风吹雪灾害发生与否的一个重要判别因子,它是成灾的物质基础. 图2(a)是20个降雪年间不同降雪量的累积概率点和拟合经验分布曲线,图2(b)是所要求解的降雪量概率密度函数曲线.通过方差检验后,拟合经验分布曲线的最优模型为一阶指数衰减函数模型,模型具体形式如式(1)所示.
y=−0.19e−(s10.7)+1.03, (1) 式中:s为研究区内不同月份的降雪量值;y为不同月降雪量对应的累计概率值.
通过对经验分布函数模型的一阶求导,得到所需的月降雪量概率密度函数为
f(s)=y′=0.02e−(s10.7). (2) 2) 风吹雪灾害的诱发条件
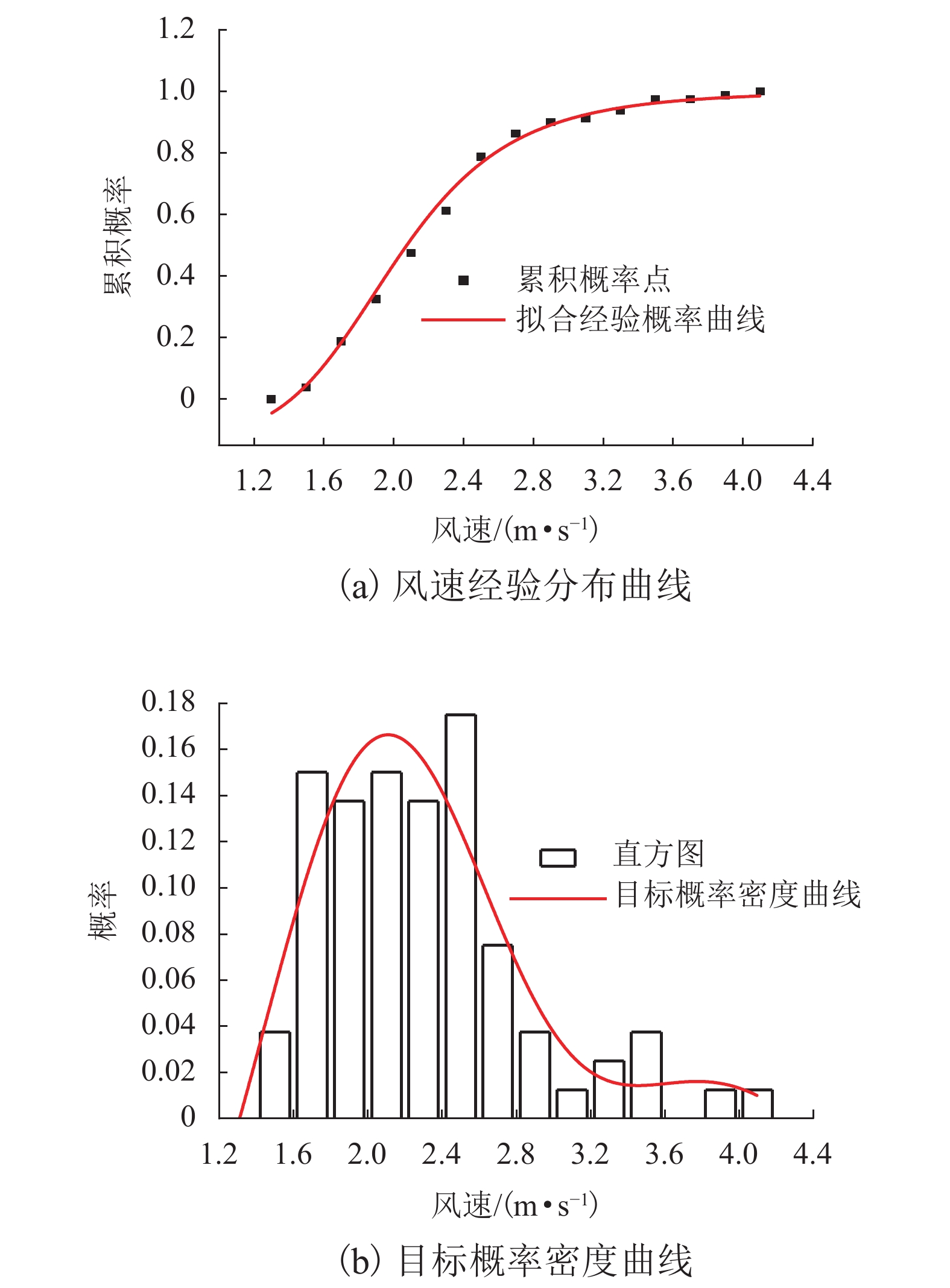
降雪事件发生时,空气中及堆积在公路附近雪粒子的运动状态主要取决于空气的作用力,而空气的作用力主要与风场的分布密切相关[8]. 图3(a)是20个降雪年间不同风速的累积概率点和拟合经验分布函数曲线,图3(b)是所要求解的风速概率密度函数曲线. 通过方差分析后,拟合经验分布曲线的最优模型为Logistic函数模型,模型的具体形式如式(3)所示.
y1=−1.131+(0.5v)6+1, (3) 式中:v为研究区内不同风速的大小;y1为不同风速下对应的累计概率值.
对最优经验分布函数模型进行一阶求导,得到所需的风速概率密度函数为
f1(v)=y′1=0.11v6(1+(0.5v)6)2. (4) 3) 风吹雪灾害危险性评估
分别获得风吹雪灾害发生的物质基础和诱发条件的概率密度函数后,基于样本数据相关性,用样本的相关系数来构造函数,并通过积事件的发生概率来获得不同强度的两种影响因素同时发生的可能性,即
H(s,v)=f2(s,v)=f(s)f1(v)√1−ρ2sv=e−(s10.70)v6420(1+(0.5v)6)2, (5) 式中:H(s,v)为风吹雪灾害发生的概率密度函数;f2(s,v)为影响因子的联合概率密度函数;ρsv为降雪量和风速之间的相关系数.
基于构建的联合概率密度函数求出所有样本事件发生的可能性,结合我国民政部所颁布的气象灾害预警划分理念,现将样本事件发生的可能性划分为5个等级[12],危险等级从高到底划分为Ⅰ级、Ⅱ级、Ⅲ级、Ⅳ级、V级,具体如表1所示. 在此基础上,完成研究区内风吹雪灾害危险性评估和等级区划图的构建.
表 1 风吹雪灾害危险性等级划分Table 1. Hazard classification of snowdrift disaster危险等级 发生概率 危险强度 Ⅰ级 > 0.92 极高 Ⅱ级 (0.72,0.92] 高 Ⅲ级 (0.56,0.72] 较高 Ⅵ 级 (0.42,0.56] 低 Ⅴ级 ≤ 0.42 极低 自然灾害的危险性是自然环境的异变产物[17]. 它的评估结果与实际符合与否本质上与当地的气候环境密切相关,在此即反映在模型的两个影响因素上,即当地的降雪量和风速. 一般情况下,在相对稳定的一段时间内,只要当地的气象状况不出现显著的极端事件,即降雪量值和风速值在所建立的自变量取值范围内,那么模型的泛化能力就比较好,就有较大的适用性.
2017年2月22日前后,黑龙江省发生强降雪,导致省内京哈、哈同、哈牡、省道鹤伊线等多条公路被封闭,严重影响了当地公路系统的整体服役性能.
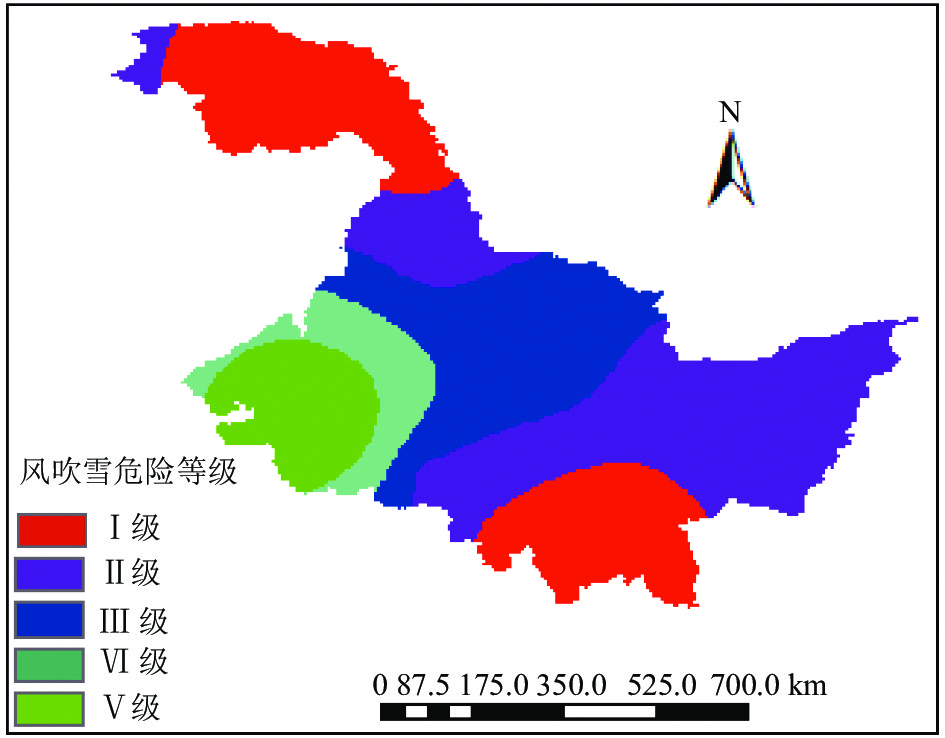
以2017年2月前后的降雪和气象条件为基础,利用本研究区气象数据所构建的联合概率密度函数计算在此段时间内不同地域的风吹雪灾害发生可能性. 对照风吹雪灾害危险性等级概率区间,将灾害发生的概率转化为对应的灾害危险性等级,等级越高灾害的危险性强度越大. 在此基础上,采用GIS技术进行空间分析可提高危险性区划的精确性[6]. 研究表明:风吹雪灾害危险性等级最高的地方主要分布在研究区的东南地区和西北地区. 2017年2月这一段时间内,研究区内各区域的风吹雪灾害危险性区划如图4所示.
4. 承灾体脆弱性评估
脆弱性指承灾体对灾害事件的抵抗能力. 公路自然灾害脆弱性指公路系统在受到不同强度的灾害作用时发生损毁的难易程度[18-20]. 目前,对脆弱性评估较为成熟的是地震对房屋建筑的破坏. 该方法是在多种假设的基础上绘制出承灾体的地震易损性曲线,是比较理想的定量化脆弱性评估模式. 但确定易损性曲线需要经验积累和理想假设,这对于其他致灾因子及力学性质存在很大随机性的其他承灾体而言尚不成熟[14].在此,采用基于指标的区域承灾体脆弱性评估方法做出宏观上的定性分析.
4.1 承灾体影响因素分析
由于自然灾害分布面积广,危害范围大. 因此,在评价公路抗灾能力时不应仅限于公路自身状况,还应考虑公路所处的社会环境,即承灾体在服役期间的社会价值暴露在不同强度灾害中的量. 本次主要从公路系统网自身抗灾能力和在服役期间承灾体的暴露等级两方面来反应公路系统的脆弱性[18, 21].
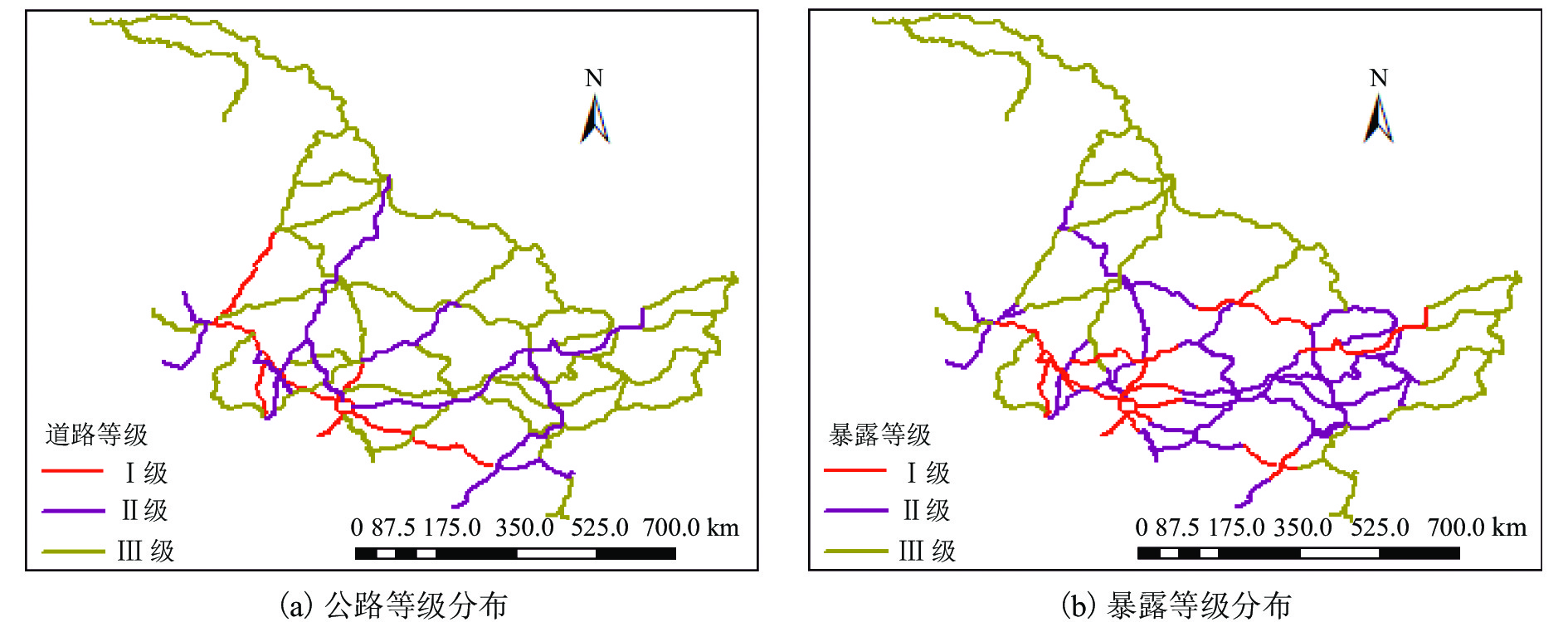
承灾体自身抗灾能力(Vr)反应了承灾体自身抵御致灾因子的打击能力. 针对雪灾对公路系统的影响,本次研究拟用公路等级作为衡量承灾体自身的抗灾能力. 一般而言,公路等级越高,其修建时投入的人力、物力水平也就越高,自身对灾害的抵抗能力也就越强. 因此,可以用公路等级来衡量公路系统的抗灾能力. 研究区公路等级的具体分布情况如图5(a)所示.
 图 5 公路脆弱性影响因素分布情况Figure 5. Distribution of affecting factors on highway vulnerability
图 5 公路脆弱性影响因素分布情况Figure 5. Distribution of affecting factors on highway vulnerability承灾体的暴露度(Ve)指在致灾因子影响范围内承灾体的价值量或数目[6, 18].公路系统网的暴露等级主要反映在公路系统网受到致灾因子影响时在单位长度或面积内运载能力的大小. 目前,对社会价值的衡量尚没有统一标准,我国城市交通管理评价指标规定,交通拥堵程度可根据机动车车速划分为4个等级:畅通、轻度拥堵、拥堵、严重拥堵,路况越拥堵,公路系统在服役期间所体现出的暴露性越高. 本次根据道路等级划分和数据信息的可获取性[6, 22],参考省交通管理厅所发布的实时路况信息的拥堵情况将公路系统的暴露等级从高到底划分为Ⅰ级、Ⅱ级、Ⅲ级. 研究区内公路系统在服役期间的暴露等级分布情况如图5(b)所示.
4.2 承灾体脆弱性分析
基于对公路系统自身抗灾能力、服役期间的暴露性两方面的分析对区域性公路系统的脆弱性进行研究,如式(6).
{R=VrVe,V=1−R−RminRmax−Rmin, (6) 式中:Ve为公路系统在服役时的暴露性;R为公路系统抗灾能力指数;V为公路系统脆弱性指数;Rmin为抗灾能力指数最小值;Rmax为抗灾能力指数最大值.
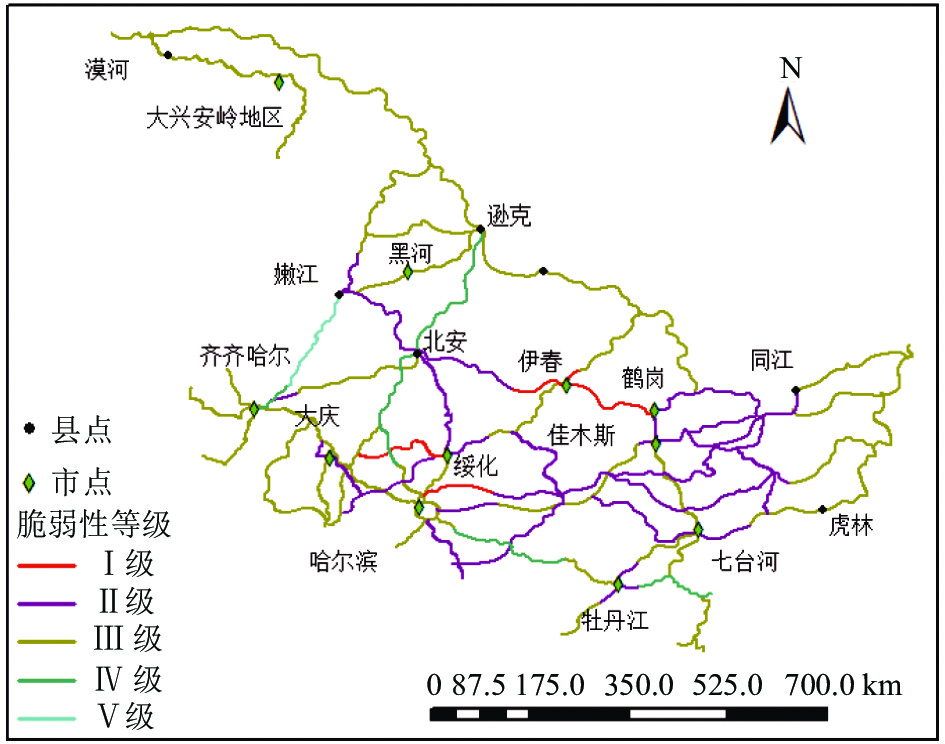
根据公路脆弱性指数的大小,按照自然断点法将研究区公路设施的脆弱性从高到底划分为Ⅰ级、Ⅱ级、Ⅲ级、Ⅳ级、V级,脆弱性指数越大,相应的脆弱性等级越高[15]. 研究区内公路系统的脆弱性等级划分情况如表2所示.
表 2 公路系统脆弱性等级划分Table 2. Classification of highway system vulnerability脆弱性
分级Ⅰ级 Ⅱ级 Ⅲ级 Ⅳ级 V 级 脆弱性
指数> 0.85 (0.70,0.85] (0.50,0.70] (0.35,0.70] ≤ 0.35 在等级划分的基础上进行研究区公路系统脆弱性区划图的构建. 分析表明:研究区内公路网脆弱性等级最高的交通线为鹤岗-伊春线、绥化-大庆线及哈同公路的哈尔滨区段;脆弱性最低的交通线主要是嫩江-齐齐哈尔段. 区域性公路系统脆弱性具体分布情况如图6所示.
5. 风吹雪灾害风险评估
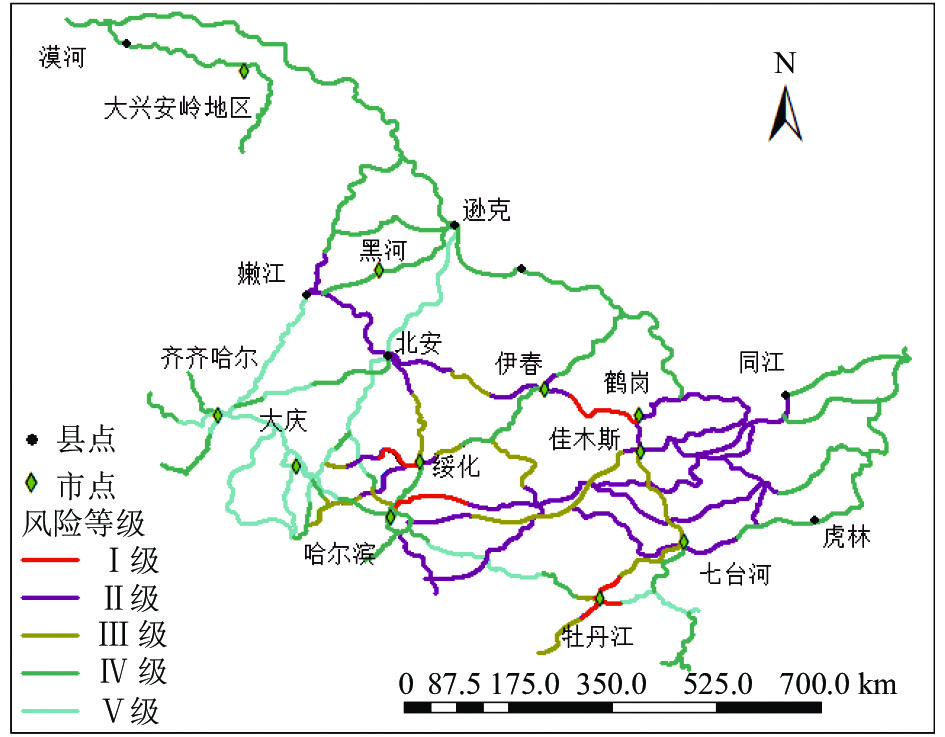
灾害风险评估是灾害风险研究的核心环节. 目前,大多数学者赞成联合国人道主义事务部所给出的风险表达式,即风险 = 危险性 × 脆弱性,并将风险作为灾害损失的不确定性,用风险强度R来衡量[14].本次采用此模式进行区域性交通系统网的灾害风险评估. 并通过GIS平台,获得公路系统网不同路段在风吹雪事件发生时的风险. 结合灾情损失等级[5, 23-25]进行风吹雪灾害风险等级的划分,如表3所示.
表 3 风吹雪灾害风险性等级划分Table 3. Risk classification of snowdrift disaster风险等级 计算风险发生概率 风险强度 Ⅰ级 > 0.69 极高 Ⅱ级 (0.47,0.69] 高 Ⅲ级 (0.30,0.47] 较高 Ⅳ 级 (0.15,0.30] 较低 V 级 ≤ 0.15 低 可用GIS技术进行区划图构建分析风吹雪事件给研究区公路系统造成的影响,以直观明了地得出公路系统网的风险展布情况,研究区内风吹雪道路风险具体分布如图7所示.
结果表明:研究区内风险等级最高的交通线为鹤岗-伊春线、绥化-大庆线的绥化段、哈同公路的哈尔滨和佳木斯段以及牡丹江周边,和省交通信息中心发布的路况信息基本一致;等级较低的交通线一般位于研究区的西部,主要分布在齐齐哈尔、大庆及大兴安岭地区.
6. 结论与展望
本研究通过寒区公路所面临的风吹雪灾害危险性分析、公路系统脆弱性分析和在此基础上构建的公路系统风吹雪灾害风险分析这三段区域性评估模式,得出如下结论:
1) 基于灾害影响因素和灾害发生结果一一对应的原则,通过灾害影响因素同时发生的概率来间接反应灾害造成影响的可能性,从而实现对雪灾风险的量化评估.结果显示与实际灾情具有很好的契合度,为公路系统灾害风险的绝对量化评估提供了一种新途径.
2) 从灾害发生及演变过程入手,基于灾害风险评估理论构建的致灾因子危险性、承灾体脆弱性以及最终的灾害风险三段评估模式为大范围区域性灾害风险研究提供了分析框架. 尤其是根据灾害发生机理探究灾害发生条件,并从灾害发生条件构建宏观评价指标的思想是确立灾害评估指标的重要手段.
3) 风险评估是为了进行分析和决策, 而决策需要具体的阈值,以便风险超过这一阈值时做出预警和应急处理,这一阈值即是该地区的灾害风险可接受水平. 可接受水平是一个相对动态的标准,不仅因区域水平而异,还会随时间发展而改变. 因此,基于可接受水平的灾害风险评估理应是一种动态化的评估进程,如何制定和量化适用于本区域在现阶段的灾害风险可接受标准是该研究在今后应该进行深入思考的问题.
-
CHATZIKOMIS C I, SPENTZAS K N. Comparison of a vehicle equipped with electronic stability control (ESC) to a vehicle with four wheel steering (4WS)[J]. Forschung im Ingenieurwesen, 2014, 78(1/2):13-25. LV Hongming, LIU Shaona. Closed-loop handling stability of 4WS vehicle with yaw rate contro[J]. Strojniski Vestnik-Journal of Mechanical Engineering, 2013, 59(10):595-603. 欧健,程相川,周鑫华,等. 基于汽车稳定性控制系统的侧翻控制策略[J]. 西南交通大学学报,2014,49(2):283-290. OU Jian, CHENG Xiangchuan, ZHOU Xinhua, et al. Rollover control strategy based onvehicle stability control system[J]. Journal of Southwest Jiaotong University, 2014, 49(2):283-290. YIN Guodong, CHEN Nan, WANG Jinxiang, et al. A study on -Synthesis control for four-wheel steering system to enhance vehicle lateral stability[J]. Journal of Dynamic Systems, Measurement, and Control, 2011, 133(1):1-6. CHEN Changfang, JIA Yingmin. Nonlinear decoupling control of four-wheel-steering vehicles with an observer[J]. International Journal of Control, Automation and Systems, 2012, 10(4):697-702. 刘启佳,陈思忠. 基于LQR的四轮转向汽车控制方法[J]. 北京理工大学学报,2014,34(11):1135-1139. LIU Qijia, CHEN Sizhong. The control method about four wheels steering car based on LQR theory[J]. Transactions of Beijing Institute of Technology, 2014, 34(11):1135-1139. 郑凯锋,陈思忠,王亚. 基于线控技术的四轮转向全滑模控制[J]. 东南大学学报:自然科学版,2013,43(2):334-339. ZHENG Kaifeng, CHEN Sizhong, WANG Ya. Four-wheel steering with total sliding mode control[J]. Journal of Southeast University:Natural Science Edition, 2013, 43(2):334-339. LI Bin, YU Fan. Optimal model following control of four-wheel active steering vehicle[C]//Proceedings of the 2009 IEEE International Conference on Information and Automation. New York:IEEE, 2009:881-886. 杜峰,闫光辉,魏朗,等. 主动四轮转向汽车最优控制及闭环操纵性仿真[J]. 汽车工程,2014,36(7):848-852. DU Feng, YAN Guanghui, WEI Lang, et al. Optimal control and closed-loop controllability simulation for active four-wheel steering vehicle[J]. Automotive Engineering, 2014, 36(7):848-852. MEN Jinlai, WU Bofu, CHEN Jie. Comparisons of 4WS and Brake-FAS based on IMC for vehicle stability control[J]. Journal of Mechanical Science and Technology, 2011, 25(5):1265-1277. LAM Tinlun, QIAN Huihuan, XU Yangsheng. Omnidirectional steering interface and control for a four-wheel independent steering vehicle[J]. IEEE/ASME Transctions on Mechatronics, 2010, 15(3):329-338. LAM T L, QIAN H, XU Y. Behavior-based steering control for four wheel independent steering vehicle[C]//IEEE International Conference on Robotics and Biomimetics. Washington D. C.:IEEE Computer Society, 2009:536-541. 舒进,陈思忠,杨林,等. 四轮独立转向系统控制策略与试验[J]. 农业机械学报,2005,36(7):25-28. SHU Jin, CHEN Sizhong, YANG lin. Advanced vehicle control technology using four-wheel independent steering system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2005, 36(7):25-28. DIRK E S, JONE M S. Effect of model complexity on the performance of automated vehicle steering controller:model development, validation and comparision[J]. Vehicle System Dynamics, 1995, 24(2):163-181. SONG J H. Development and comparison of integrated dynamics control systems with fuzzy logic control and sliding mode control[J]. Journal of Mechanical Science and Technology, 2013, 27(6):1853-1861. GAO Linlin, JIN Lisheng, WANG Faji, et al. Genetic algorithm-based varying parameter linear quadratic regulator control for four-wheel independent steering vehicle[J]. Advances in Mechanical Engineering, 2015, 7(11):1-14. 高琳琳,金立生,郑义,等. 四轮转向车辆的径向基函数神经网络复合控制器设计[J]. 吉林大学学报:工学版,2016,46(2):366-372. GAO Linlin, JIN Lisheng, ZHENG Yi, et al. Design of radial basis function neural network compound controller for four-wheel steering vehicle[J]. Journal of Jilin University:Engineering and Technology Edition, 2016, 46(2):366-372. 安部正人. 汽车的运动与操纵[M]. 陈辛波, 译. 北京:机械工业出版社,1998:176-177. 杜峰. 基于线控技术的四轮主动转向汽车控制策略仿真研究[D]. 西安:长安大学,2009. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 679
- HTML全文浏览量: 114
- PDF下载量: 181
- 被引次数: 0
 下载:
下载: