

Short-Period Error Suppression Method of PCB-Based Inductive Linear Displacement Sensor
-
摘要:
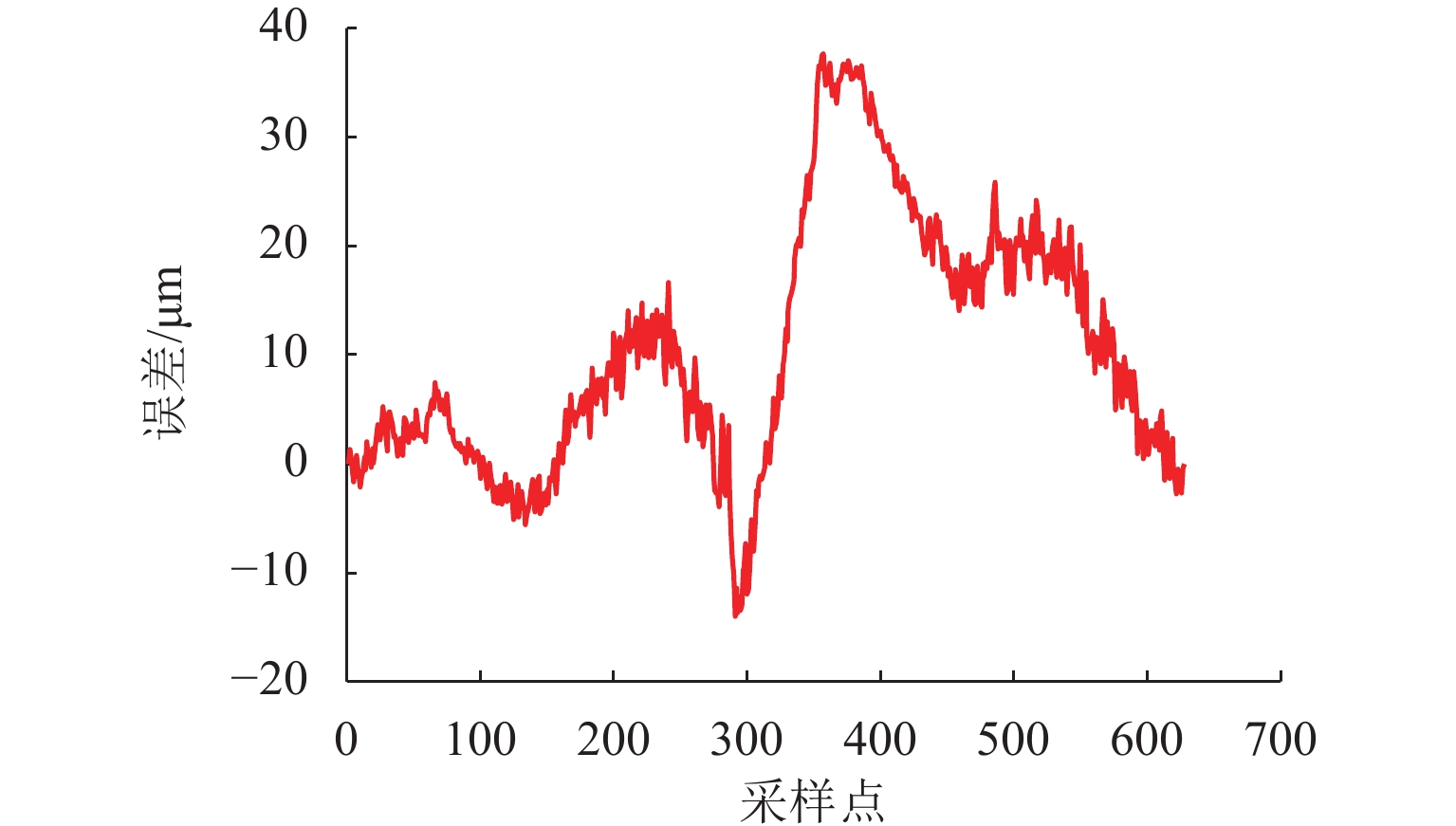
在直线位移测量中,基于PCB (printed circuit board)工艺的新型电磁感应式位移传感器因具有较大栅距,在制造、装配等工艺环节易导致短周期误差. 在所导致的短周期误差类型中,1次和4次误差是PCB型电磁感应式直线位移传感器中最常见的短周期误差. 为减小测量过程中产生的1次和4次误差,本文从输出信号出发,针对此2种误差的产生机理开展研究,并提出一种不依赖外部基准的误差自我修正方法. 首先,从理论层面分析短周期1次和4次误差的来源,以及2种误差与传感器原始SIN (sine)和COS (cosine)信号的函数关系;然后,建立基于传感器原始SIN和COS信号特征的短周期误差函数模型,并根据本文传感器样机的实测数据计算出误差函数模型中1次和4次误差的相应参数;最后,将1次和4次误差模型用于传感器样机的误差补偿. 研究结果表明:补偿后的样机实验结果显示误差峰值由51.6 μm减小到36.2 μm,其中,短周期1次误差减小了约64.5%,短周期4次误差减小了约83.0%.
Abstract:In the linear displacement measurement, the printed circuit board (PCB)-based new inductive displacement sensors is easy to lead to short-period errors in manufacturing, assembly, and other process links because of its large pitch. Among the types of short-period errors caused, the first-order and fourth-order errors are the most common short-period errors in PCB-based inductive linear displacement sensors. Therefore, in order to reduce the first-order and fourth-order errors, the generation mechanism of these two kinds of errors was first studied from the output signals, and then an error self-correction method that did not depend on external reference was proposed. Firstly, the sources of short-period first-order and fourth-order errors and the functions of the two errors with the original sine (SIN) and cosine (COS) signals of the sensor were analyzed theoretically. Then, a short-period error function model based on the characteristics of the original SIN and COS signals of the sensor was established, and the corresponding parameters of the first-order and fourth-order errors in the error function model were calculated based on the measured data of the sensor prototype. Finally, the first-order and fourth-order error models were used for the error compensation of the sensor prototype. The results of prototype experiments show that the peak-to-peak value of the error after compensation is reduced from 51.6 μm to 36.2 μm. The short-period first-order error is reduced by about 64.5%, and the short-period fourth-order error is reduced by about 83.0%.
-
Key words:
- sensor /
- linear displacement /
- induction /
- error suppression /
- self-correction
-
截至2023年11月30日,我国高速铁路营业里程已达到4.37万公里,成为世界上高铁运营里程最长、运营动车组最多、运行场景最复杂的国家. 信号系统是保障高铁安全、高效运行的核心设备,目前,我国正深入研究涵盖计算机联锁、列控中心、无线闭塞中心和调度集中等关键设备的综合测试平台. 加强设备间的测试验证,优化现场工程测试方案,大力降低信号系统工程中的安全风险,信号系统工程测试已成为我国高铁领域中的重要研究课题.
在高铁工程项目中,由于站场、线路参数和速度等级等条件的不同,信号系统设备需要根据具体的工程数据进行相应的接口配置,保证工程项目中设备间行为关系的一致性. 高铁信号系统作为一种对安全性与可靠性要求极高的工程应用[1],系统工程中若存在行为关系错误,将可能引发重大事故,导致严重的生命与财产损失. 由于高铁信号系统工程的安全性不局限于单个设备的功能安全,在线路正式投入运营前,需要对系统中各设备之间的交互和设备间的各项行为关系进行充分的测试,涉及复杂的信号交互和设备间的状态同步,增加了高铁信号系统工程测试的难度.
目前,高铁信号系统测试的研究热点主要为基于模型的测试(MBT)理论,常用的测试建模方法包括Petri网、时间自动机(TA)和UML状态图(unified modeling language statechart)等,研究方向主要包括自动搜索测试模型生成测试用例、将测试模型与测试关键技术或系统安全性分析理论结合生成更全面的测试用例和针对高铁信号系统领域的测试建模方法3个方面:1) 在自动搜索测试模型生成测试用例方面,文献[2]和文献[3]构建无线闭塞中心切换场景的有色Petri网(CPN)模型,分别研究蚁群算法和深度优先搜索等算法优化测试序列. 文献[4]和文献[5]以车载设备为研究对象,构建CPN模型,分别研究测试序列搜索算法和中国邮路算法生成测试序列集. 文献[6]针对列控中心的特点,构建带有输入输出时间的确定性有限状态机模型,利用广度优先搜索算法和边界值分析方法生成测试用例. 文献[7]研究时间自动机建模理论,提出了基于UPPAAL-TRON的列控系统在线测试框架和测试用例生成算法. 2) 在测试模型与测试关键技术或系统安全性分析理论结合方面,文献[8]和文献[9]在TA方法的基础上,分别结合变异测试理论和故障树理论,提出更全面的列控系统测试用例生成方法. 文献[10]针对列控系统非确定性时延的问题,结合TA建模和一致性测试理论,提出一致性在线测试方法. 文献[11]采用UML状态图建模方法,针对轨道电路编码功能,综合图覆盖、组合覆盖和文法分析等测试技术生成测试用例. 文献[12]利用有限状态机模型描述车载目标速度监控曲线的内部状态迁移过程,利用I/O等价原理和等价类划分理论,进一步引入被测系统的故障模型和故障域范围生成更为全面的测试用例集. 文献[13]将基于搜索的技术和基于模型的突变测试相结合,设计适配函数指导测试用例的搜索过程. 文献[14]针对列控系统的复杂故障模式,结合失效模式与影响分析(FMEA)和UML序列图等技术,建立系统的故障扩展混合自动机模型,生成包含故障的安全测试用例. 3) 在测试建模方法方面,针对高铁信号系统测试建模过程中描述信号系统领域特征不够全面的问题,以有限状态机理论为研究基础,文献[15]提出时间状态机测试建模理论和测试用例生成方法,文献[16]提出风险时间状态机建模方法.
复杂行为关系和状态同步机制是高铁信号系统工程测试的重点内容之一. 目前对高铁信号系统工程中复杂的信号交互和状态同步机制研究较少,既有研究采用的测试建模方法在描述信号系统工程测试的复杂行为关系和状态同步时,如CPN、TA,模型复杂度较高、可读性差;UML状态图具有同步机制,但结构复杂,直接搜索高效的测试用例的难度较大. 信号系统工程测试缺少系统性的建模方法,对复杂行为和状态同步关系的测试用例设计主要依赖于专家经验,覆盖不够全面,测试效率不高. 本文针对高铁信号系统工程测试建模中的复杂行为关系和状态同步问题,以有限状态机理论为研究基础,提出扩展有限状态机测试建模方法描述信号系统工程测试中的复杂行为关系和状态同步,并提出测试用例自动生成方法,提高信号系统工程测试用例生成的全面性,为提升我国高铁信号系统的安全性和可靠性提供新的途径和研究思路.
1. 高铁信号系统工程测试建模需求
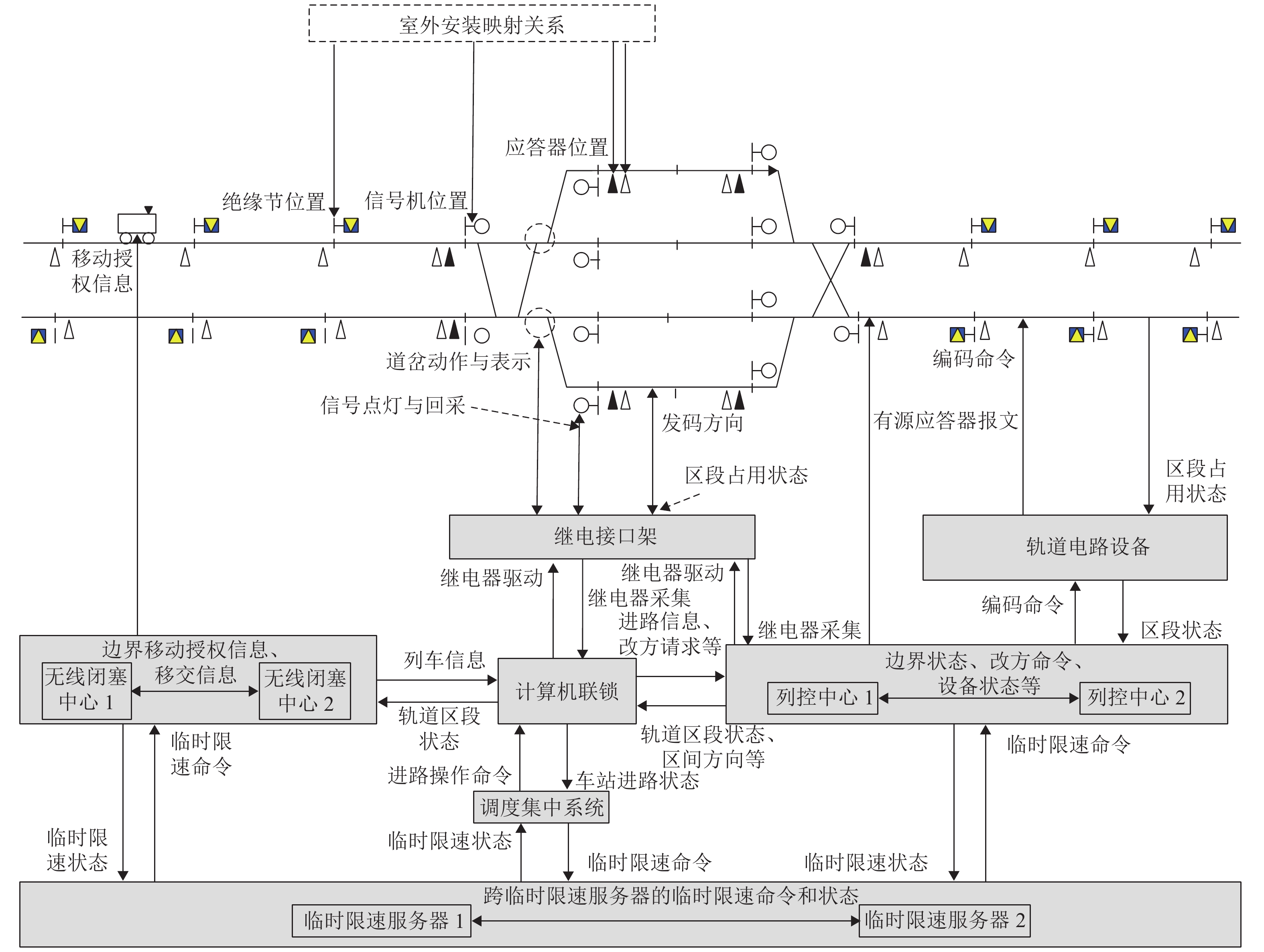
高铁信号系统功能涵盖站内进路控制、区间方向控制、点灯控制、应答器报文控制、轨道电路编码、临时限速设置和移动授权等功能,功能分散在计算机联锁、列控中心、临时限速服务器和无线闭塞中心等各个安全设备中,整个工程过程的结果形成了各个设备之间的工程关联关系,包括映射关系和行为关系:映射关系包括室外安装映射、施工配线映射和工程数据映射;行为关系包括继电电路行为和信号设备行为,如图1所示.
高铁信号工程测试主要包括2个方面的内容:1) 工程设计与实际系统的一致性测试;2) 信号系统设备之间的行为关系测试. 本文针对高铁信号系统工程中设备之间的行为关系测试展开研究. 高铁信号系统行为交互复杂,需由多个设备相互配合实现整个系统的功能,设备间不可避免地产生大量事件交互. 由于工程测试是从整个高铁信号系统的安全运行出发,以系统整体为研究对象,侧重设备之间的交互过程,测试建模方法需要重点描述设备之间大量的事件交互以及各个设备之间的状态同步等特点. 本文针对信号系统工程测试中行为关系的特点,在有限状态机理论的基础上,扩展出状态事件、层次性和同步机制,提出适合高铁信号系统工程测试的建模方法.
2. 有限状态机概述
有限状态机(FSM)是MBT理论中经典的测试建模方法[17],采用可视化的方式直观地描述系统状态以及状态之间的转移关系,通常用作测试用例编制和测试结果评判的模型依据.
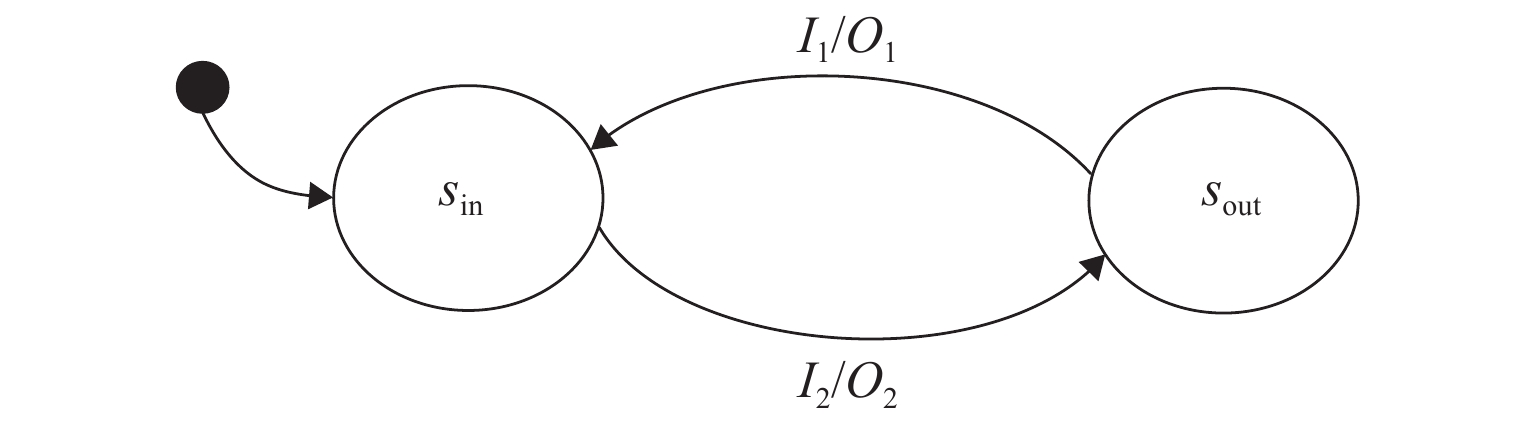
定义1 有限状态机是一个六元组,$ M = ( S, {s_{{\mathrm{init}}}},\Sigma ,X,\delta ,\lambda ) $[18],S为有限状态集合;$ {s_{{\mathrm{init}}}} \in S $,为初始状态;Σ为有限输入符号集;X为有限输出符号集;$ \delta ,S \times \varSigma \to X $,为输出函数;$ \lambda ,S \times \varSigma \to S $,为状态转移函数.
图2为一个FSM模型示例Mex. Mex包括初始状态sin和输出状态sout,I1、I2为输入符号集,O1、O2为输出符号集. sin接收到输入I2时转移到sout状态,同时输出O2. Mex六元组如下:S={sin, sout},sinit = sin,Σ={I1, I2},X={O1, O2},λ(sout, I1)= sin,λ(sin, I2)= sout,δ(sin, I2)= O2,δ(sout, I1)= O1.
根据有限状态机的定义,其不具有同步和复杂事件交互的机制,不能满足高铁信号系统工程测试的需求.
3. 扩展有限状态机
本节以有限状态机作为测试建模的理论基础,对FSM进行扩展,提出面向高铁信号系统工程测试的扩展有限状态机建模方法(EFSM).
结合Z规格说明语言,提出EFSM的定义. 为描述方便,普遍采用逐层递进的方式对复杂建模方法进行描述[19-20]. 首先,定义EFSM的基本元素,在FSM的状态中扩展出事件和同步属性,然后定义EFSM的层次结构,最后给出EFSM的形式化定义,达到描述高铁信号系统工程测试模型的复杂行为和状态同步关系的目的.
3.1 EFSM的基本元素
EFSM包括状态、事件表达式和迁移等基本元素.
1) 状态
EFSM的一个非空、有限的状态集合记为S.
[S]
∃ x : ℕ1 ⦁ #S = x
状态具有初始状态(INIT)和同步状态(FINAL)2种属性.
F ::= INIT | FINAL
状态包括BASIC、AND和OR 3种类型.
D ::= BASIC | AND | OR
2) 事件
事件E具有产生和不产生2种状态,SYNC表示同步事件,E0表示事件一直产生的常量.
[E]
∃ x : ℕ ⦁ #E = x
3) 事件表达式
事件之间的and、or和not逻辑关系构成事件表达式,记为Ex,如a or b表示事件a或事件b至少有一个产生.
4) 迁移
迁移是EFSM从源状态转移到终止状态的方式,包括源状态su,事件e,转移时产生的事件c和终止状态se. 迁移的Z语言描述为

3.2 层次性扩展
本小节在EFSM基本元素的基础上,进一步定义EFSM的层次结构.
EFSM的状态层次Ψ包括顶状态stop、状态事件分配函数v、直接子状态函数u、直接父状态函数p、状态类型分配函数r、状态属性分配函数m. Ψ满足以下性质:
1) stop 是唯一不具有父状态的状态,且 v 不能为其分配状态事件;
2) m 仅对 AND 状态中的直接 OR 子状态中的BASIC 状态分配 FINAL 属性;
3) u为AND 状态和OR 状态分配直接子状态,且不能循环分配;
4) OR 状态包含且仅包含一个初始状态,且所有直接子状态均属于同一层次;
5) 多个并发的OR 状态组成AND状态;
6) 任意非 stop 的状态有且仅有一个直接父状态,且均可以通过 u 由 stop传递到达.
Ψ的Z模式定义如下:

EFSM由状态层次和迁移集构成,Z 模式定义为

EFSM满足以下性质:
1) stop状态不为任何迁移的源状态或终止状态;
2) 迁移的源状态和终止状态不能为OR 状态,可以是AND或BASIC状态,且一条迁移有且仅有一个源状态和终止状态;
2) 迁移不能跨层次迁移;
3) 具有SYNC事件的变迁,其源状态与产生SYNC事件的AND状态具有相同的直接父状态;
4) 具有SYNC事件的变迁,其源状态为AND状态或其父状态为AND状态;
5) OR 状态的初始状态无源状态,且对任意直接子状态,可由初始状态通过迁移传递到达;
6) 迁移的触发事件不能是SYNC.
3.3 格 局
EFSM能够同时激活的最大状态集合称为格局,记为n,初始格局记为n0. 格局遵循以下规则:
1) stop状态属于n;
2) 如果OR状态s属于n,则s有且仅有一个直接子状态属于n;
3) 如果AND状态s属于n,则s的每一个直接子状态都属于n;
4) 如果非stop的状态s属于n,则s的直接父状态属于n;
5) n仅包含满足规则(1)~(4)的所有状态.
对任意格局,至少应该包含stop状态和一个BASIC状态,描述如下:

3.4 同步机制
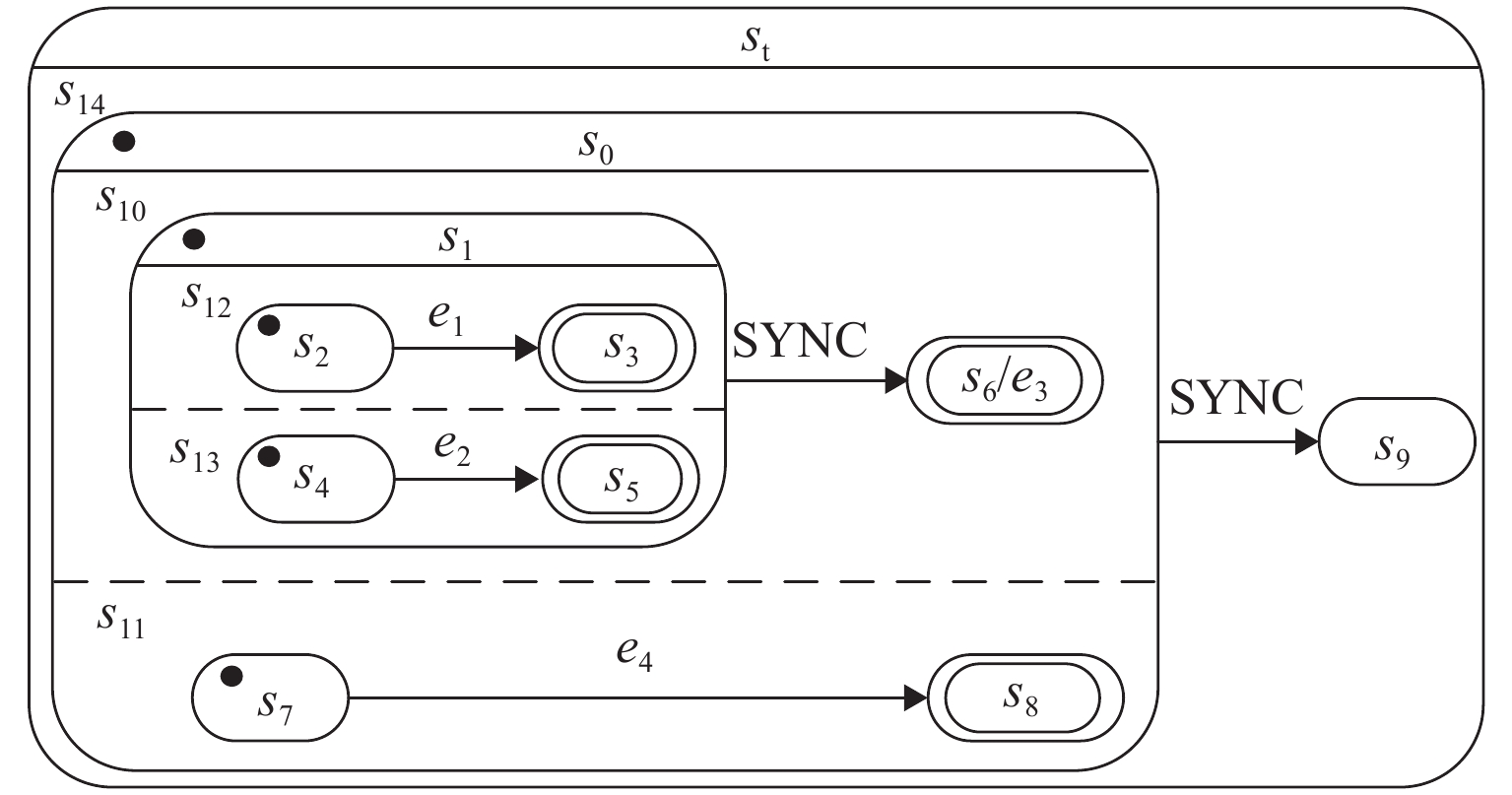
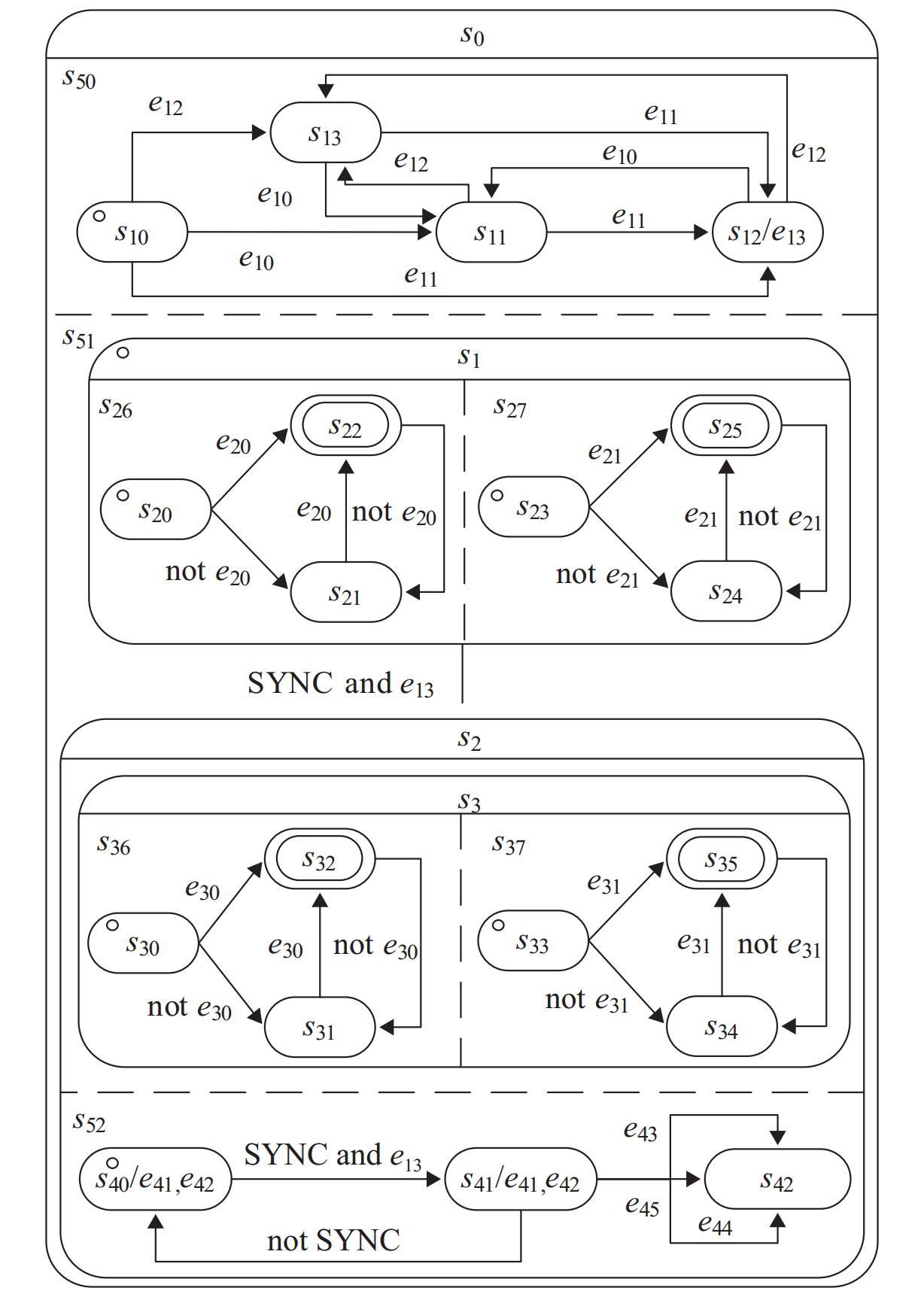
EFSM利用状态的FINAL属性实现模型中相关状态之间的同步和转移. EFSM仅为AND状态的直接OR子状态中的BASIC状态定义FINAL属性,当该AND状态的所有直接OR状态均激活FINAL状态时,AND状态自动产生SYNC事件. SYNC事件的作用域仅为该AND状态同层次的变迁集,且1个AND状态最多包含1个SYNC事件. 图3为EFSM示例模型.
图3包括st、s0~s14 (15个状态)、e1~e3、SYNC 4个事件,其中顶状态为st,初始状态为{s0, s1, s2, s4, s7}. 状态s3、s5、s6、s8具有FINAL属性,n0=(s0, s1, s2, s4, s7),u(s1)={s12, s13},p(s1)=s10,r(s1)=AND,r(s2)=BASIC,r(s12)=OR,v(s6)=e3.
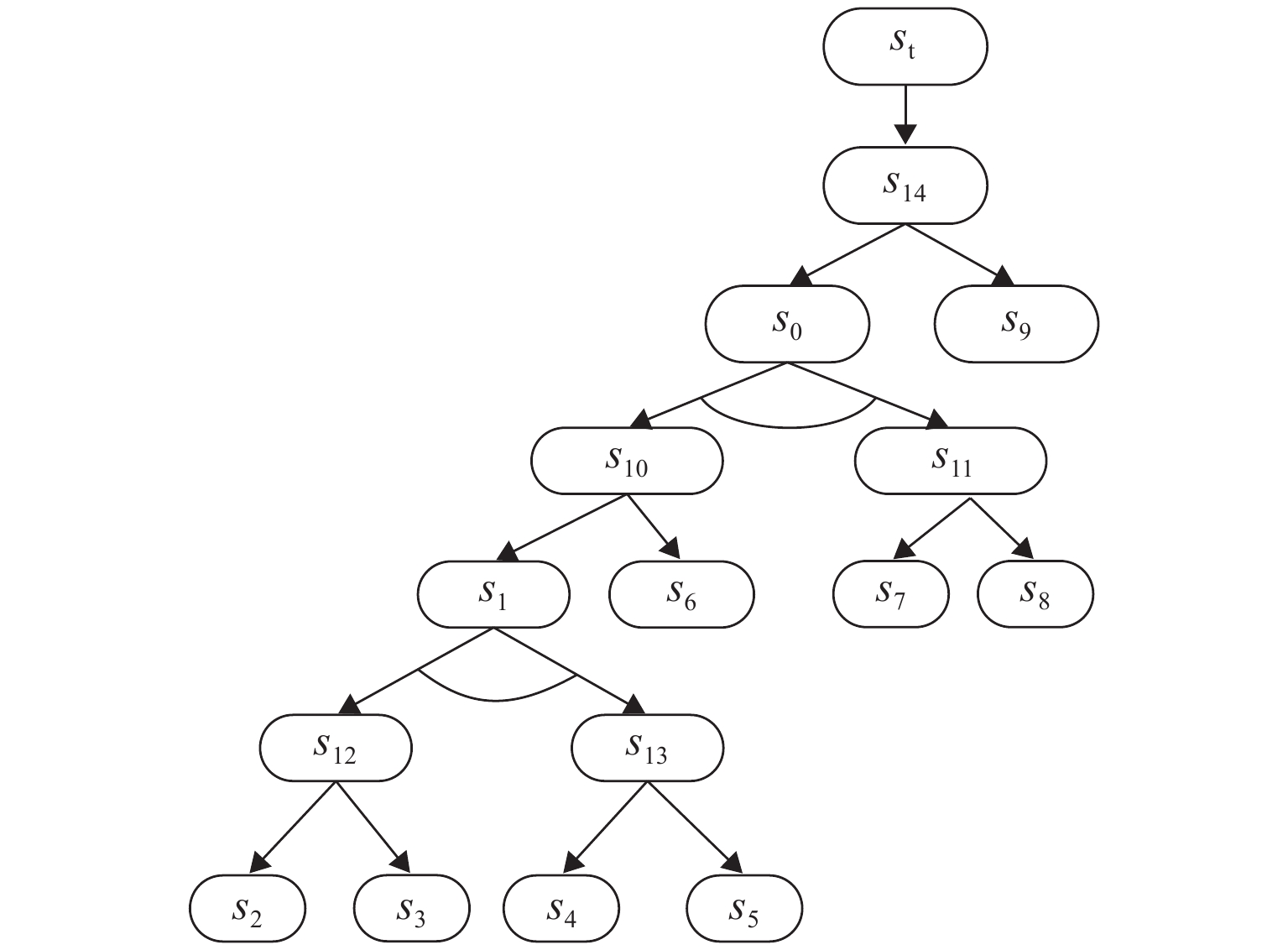
图3的层次性结构如图4所示,其中AND状态的子状态用弧线连接.
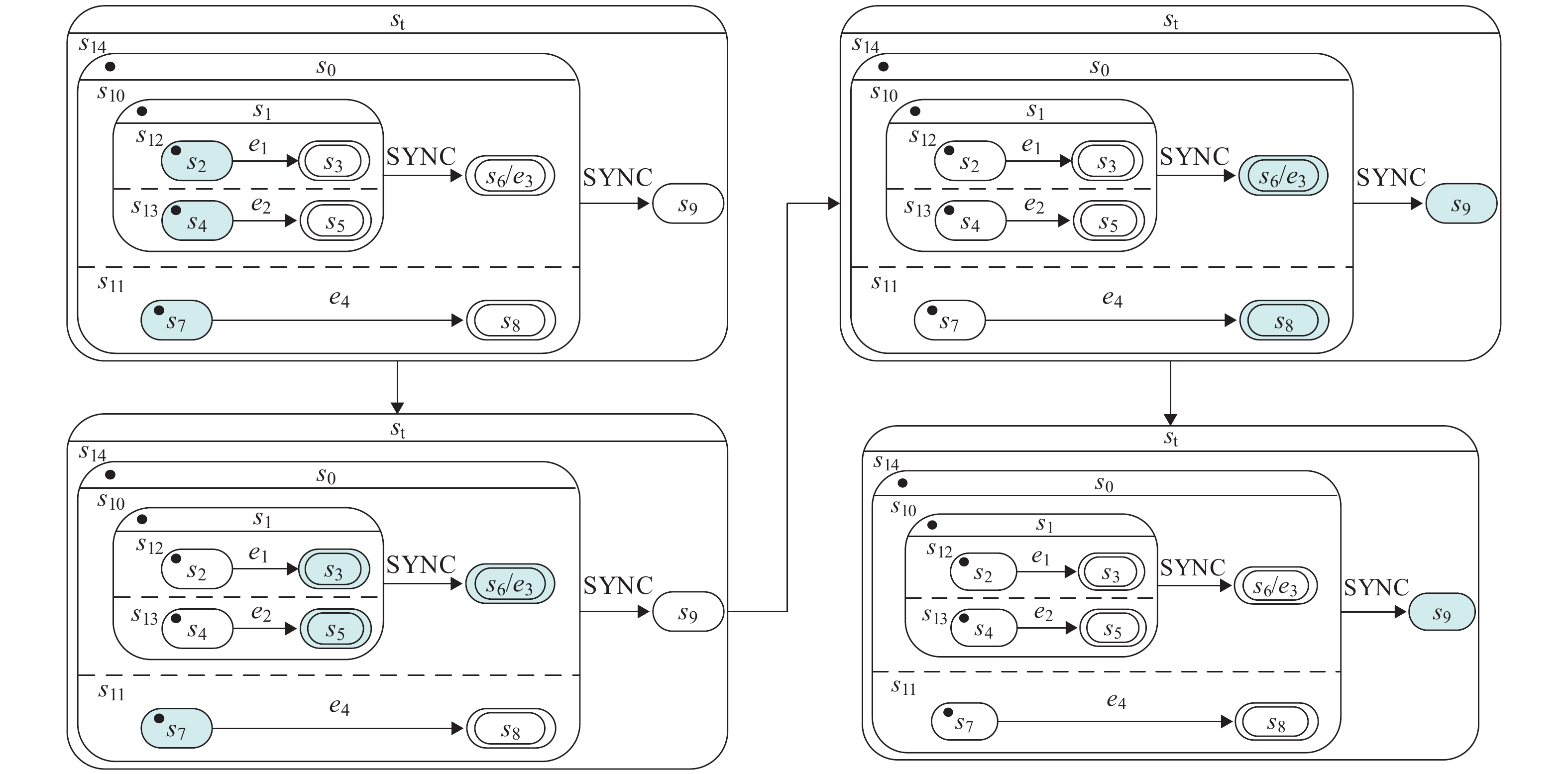
当e1、e2事件触发后,s3、s5同时激活,触发SYNC事件,SYNC事件影响s1同层次范围内的迁移,触发${s_1}\xrightarrow{{{\mathrm{SYNC}}}}{s_6}$,转移到s6状态,触发状态事件e3. s6激活时,e3持续产生. 当s6、s8激活时触发SYNC事件,影响st同层次范围内的变迁,触发${s_{\text{0}}}\xrightarrow{{{\mathrm{SYNC}}}}{s_{\text{9}}}$,转移到s9,格局主要转移过程如图5所示.
4. 基于EFSM的测试用例生成方法
由于EFSM结构相对复杂,模型解析繁琐,不易直接从EFSM生成测试用例. 目前,对基于时间自动机(TA)的测试用例生成算法研究丰富,开发了较为成熟的建模和测试用例生成工具UPPAAL. 因此,本节研究EFSM和 UPPAAL TA的特点,提出EFSM转换UPPAAL TA的算法,采用模型转换的方式,利用UPPAAL TA较为成熟的算法和工具实现EFSM测试模型到测试用例的自动生成.
UPPAAL在TA的基础上,扩展出int、bool和broadcast chan 等类型[21],集成Yggdrasil提供Query file、Depth Search和Single Step 3种机制自动生成测试用例[22]. EFSM转换为UPPAAL TA的算法为
算法1 EFSM转换UPPAAL TA算法
输入:EFSM模型M
输出:UPPAAL TA模型M1
步骤1 从M中选取$ s $,且ε s = OR,s集合记为Sk.
步骤2 选取si∈Sk,建立si对应的TA模型mi;将si的直接子状态转换为mi的位置;将si的迁移转换为mi的变迁.
步骤3 将si中的事件映射为mi的broadcast chan. 如果si包括not事件表达式,在mi中新增broadcast chan映射该not事件表达式.
步骤4 如果si包括状态事件,mi中新增bool变量,对应位置增加条件为true的自迁移,入射变迁将bool变量置为true,出射变迁置为false.
步骤5 如果si包括FINAL状态,mi新增bool变量描述该状态是否激活;mi对应的位置中增加条件为true的自迁移,入射变迁将bool变量置为true,出射变迁置为false.
步骤6 将si的SYNC事件映射为mi中对应的bool变量合取表达式.
步骤7 将si的事件表达式分解为单个事件或bool变量,mi根据si事件表达式对应的各个事件或变量依次进行状态转移.
步骤8 遍历si的格局转移关系,调整mi结构,保证mi与si转移关系的一致性.
步骤9 Sk = Sk \ si.
步骤10 如果Sk =$ \varnothing $,则继续步骤11,否则重复步骤2~9.
步骤11 遍历M 的格局转移关系,调整M1结构,保证转移关系一致;输出M1= m1 || m2 || $\cdots $ || mi.
转换算法以EFSM的OR状态为核心,将EFSM的事件映射为UPPAAL TA中的broadcast chan,将状态事件映射为bool变量,将SYNC事件映射为bool合取表达式的方式,具体包括以下规则:
1) 将EFSM中的OR状态转换为对应的TA模型;
2) 将OR状态的直接子状态转化为TA的位置,将OR状态之间的迁移转化为TA中对应位置之间的变迁;
3) 将EFSM的事件转化为TA的broadcast chan;
4) 在TA中新增broadcast chan表示EFSM的not事件表达式,将EFSM的事件表达式分解为TA的多个broadcast chan或bool变量的状态转移;
5) 对EFSM的FINAL状态,在TA新增bool变量描述该状态激活,在对应的位置中增加条件为true的自迁移,入射变迁将bool变量置为true,出射变迁置为false;
6) 用bool变量的合取表达式替换SYNC事件;
7) 将EFSM的状态事件映射为1个bool变量,并在TA对应位置的入射变迁将bool变量置为true,出射变迁置为false.
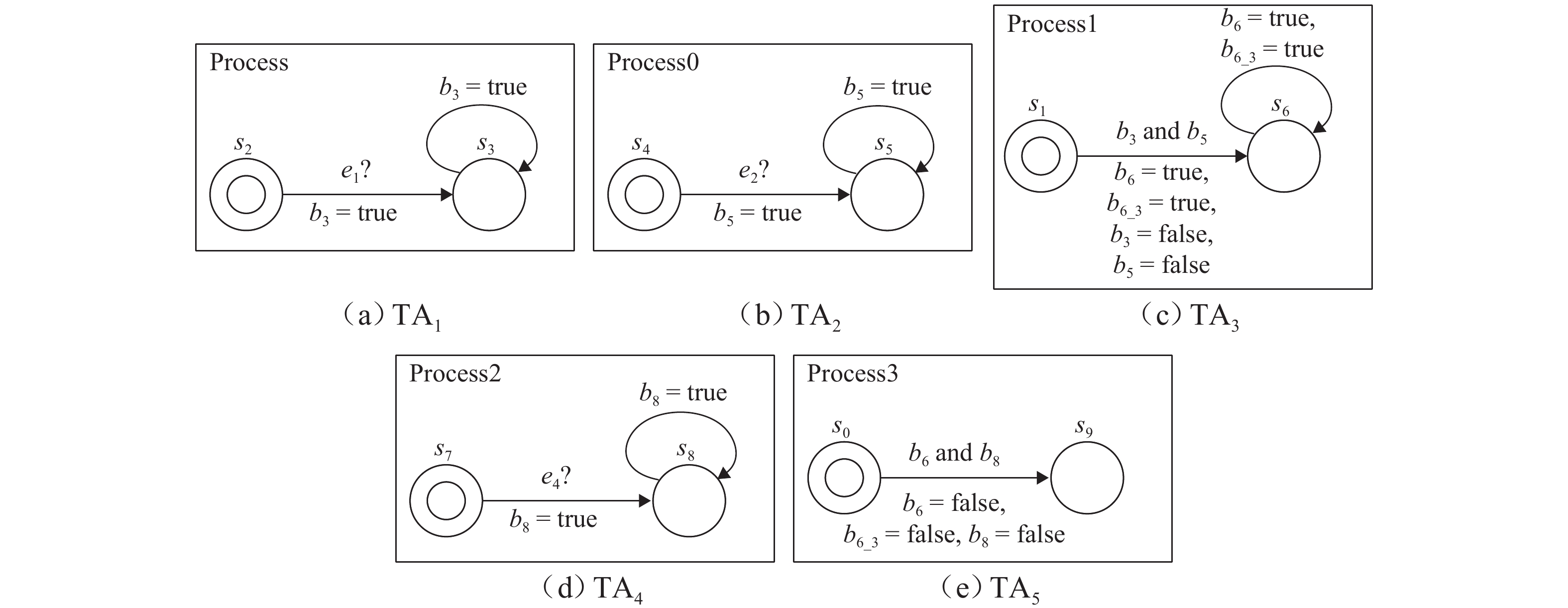
图3的EFSM模型对应的TA模型如图6所示,包括TA1~TA5 5个子模型. EFSM模型包括:s14、s10、s11、s12和s13 5个OR状态,分别映射为5个TA子模型;s3、s5、s6、s8 4个FINAL状态分别映射为TA中的4个位置和4个bool变量(b3、b5、b6、b8),通过变量取值true表示状态激活;s6的状态事件e3映射为bool变量b6_3.
5. 案例分析
为节省篇幅,本节以高铁信号系统工程测试中的进路控制测试为例,建立EFSM测试模型,并转化为UPPAAL TA模型生成测试用例.
5.1 基于EFSM的进路控制测试模型
进路控制是高铁信号系统工程测试的核心工作之一,涉及的设备对象包括轨道区段、道岔、信号机、列控中心(TCC)和无线闭塞中心(RBC)等. 为描述方便,本节仅针对进路控制主要的行为关系建立EFSM模型,如图7所示,记为Droute,事件名称及其含义见表1.
表 1 Droute事件含义Table 1. Meaning of events in Droute事件 含义 事件 含义 e10 进路占用 e11 进路空闲 e12 进路红光带 e13 进路检查通过 e20 道岔正确 e21 超限绝缘相邻区段空闲 e30 敌对进路满足 e31 灯丝正常 e41 向 TCC 发送进路 e42 向 RBC 发送 SA e43 取消进路 e44 延迟解锁 e45 分段解锁 Droute中,状态s10、s20、s23、s30、s33、s40分别表示“进路状态”“道岔状态”“超限绝缘相邻区段状态”“敌对进路”“灯丝状态”“进路控制”的初始状态,其余状态含义见表2.
表 2 Droute状态含义Table 2. Meaning of states in Droute状态 含义 状态 含义 s11 进路处于占用状态 s12 进路处于空闲状态 s13 进路处于红光带状态 s21 道岔位置处于非法状态 s22 道岔位置处于合法状态 s24 超限绝缘相邻区段处于占用状态 s25 超限绝缘相邻区段处于空闲状态 s31 敌对进路处于建立状态 s32 敌对进路处于未建立状态 s34 灯丝处于故障状态 s35 灯丝处于正常状态 s41 进路处于建立状态 s42 进路处于取消状态 工程测试过程中,进路控制检查进路中道岔状态是否符合预期、超限绝缘是否正确、进路中区段是否空闲,如果条件都符合要求,进路锁闭. 信号开放状态重复检查区段空闲、道岔位置正确、敌对进路未建立. 进路解锁主要分为正常解锁、延迟解锁和取消进路.
5.2 测试用例生成
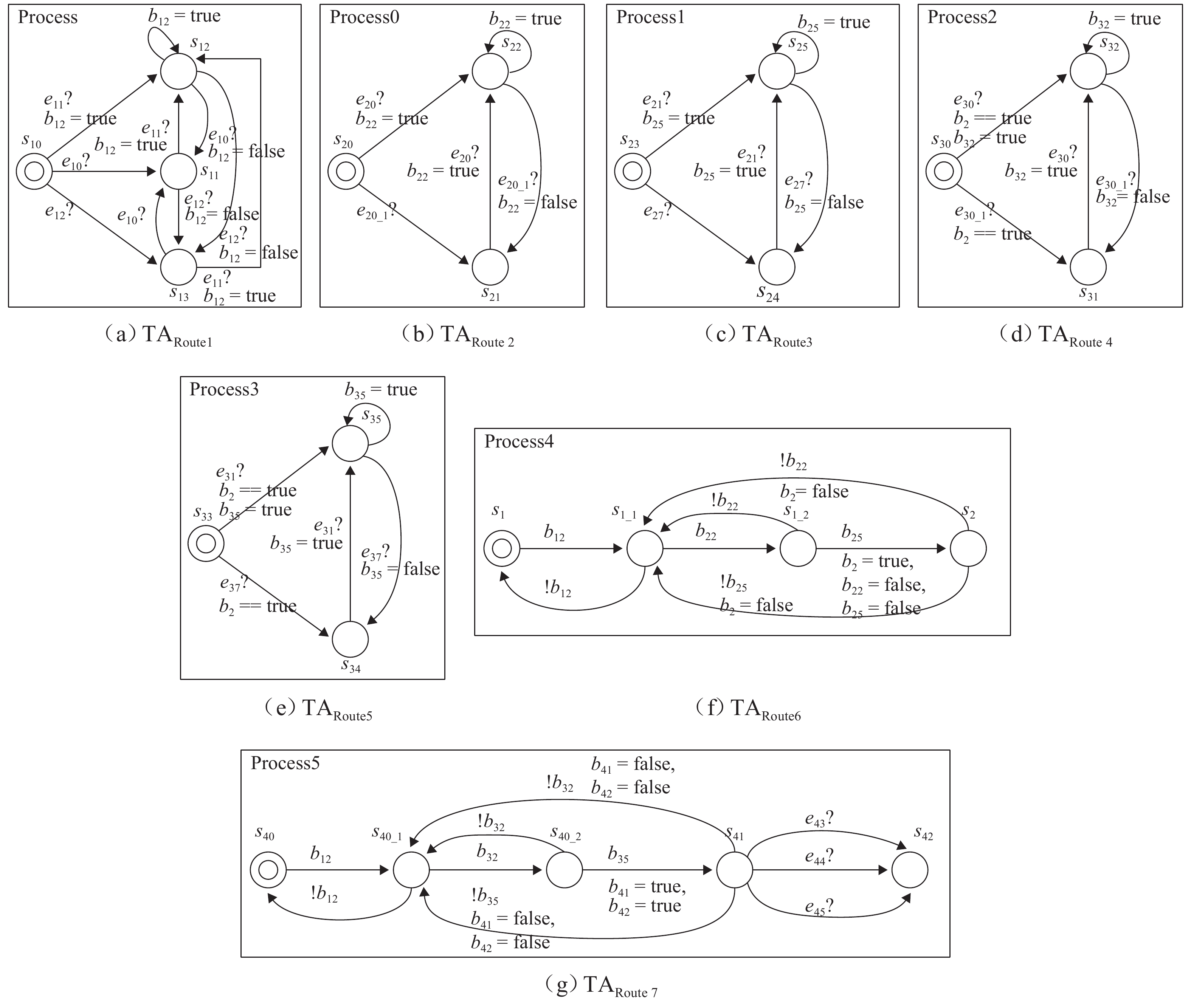
根据EFSM转换为UPPAAL TA的算法,Droute的TA模型如图8 所示,包括TARoute1~TARoute7 7个子模型,记为Droute_TA. 其中,b12为算法1新增的bool变量,表示进路处于空闲状态,其余变量类似.
Droute通过19个BASIC状态、29条迁移和13个信号描述了进路控制过程的工程测试需求. TA模型描述该需求所需的状态、变迁、broadcast chan和变量数较多,如表3所示,表明EFSM结构更清晰,可读性更好,建模能力更强.
表 3 Droute与Droute_TA 对比Table 3. Comparison between Droute and Droute个 模型 构件数 状态数 变迁数 事件/变量数 Droute 1 19 29 13 DTA 7 25 47 22 针对Droute_TA模型,采用UPPAAL Yggdrasil的Query file、Depth Search和Single Step 3种机制自动生成19条测试用例,典型测试用例如表4所示.
表 4 Droute测试用例(部分)Table 4. Test cases of Droute (part)测试用例 主要内容 1 a) 进路区段空闲,道岔位置正确,超限绝缘相邻区段占用;b) 超限绝缘相邻区段空闲,进路上区段红光带,进路不能锁闭 2 进路空闲、超限绝缘相邻区段空闲、道岔位置正确、敌对进路未建立,进路锁闭,信号机开放 3 a) 进路空闲,超限绝缘相邻区段空闲,道岔位置正确,进路锁闭,信号尚未开放;b) 敌对进路未建立,灯丝正常,但进路占用,信号不能开放 4 a) 进路锁闭后,向 TCC 发送联锁进路;b) 进路锁闭后,向 RBC 发送 SA 信息 5 进路锁闭后,灯丝断丝,信号不能开放 6 列车在进路内正常运行,进路分段解锁 7 接近区段占用,接车进路解锁时需延时 3 min 5.3 测试用例评估
目前,高铁信号工程领域进路控制的测试用例主要来源于专家经验和工程积累. 根据EFSM 生成的测试案例完全包含了既有测试案例,且更为全面,覆盖超限绝缘相邻区段、TCC、RBC、灯丝断丝等关键场景. 以测试用例1为例,测试内容主要包括2个场景:首先,进路区段空闲,道岔位置正确,但超限绝缘相邻区段占用;随后,超限绝缘相邻区段由占用状态变为空闲状态,但同时进路区段发生红光带,进路不能锁闭. 相对于既有的测试用例生成方法,本文提出的方法能够提高高铁信号工程测试用例的全面性.
为对测试用例的有效性进行定量评价,本节采用变异分析方法对测试用例发现错误的能力进行评估. 首先采用变异算子对测试模型进行变异,产生一系列的变异模型,然后在模型中执行测试用例,若测试用例能够发现测试模型和变异模型之间的差异,则证明测试用例是有效的. 变异评分计算公式为[23]
MS=M3M1−M2, (1) 式中:${M_1}$为变异体总数,${M_{\text{2}}}$为变异体中等效变异体的数量,${M_{\text{3}}}$为测试用例发现的变异体数量.
本节通过增加、减少Droute的状态、迁移,以及改变Droute信号表达式的内容产生45个变异模型[24]、无等效变异模型. 图9为改变Droute状态s52信号表达式产生的变异模型. 在模型中运行测试用例4能够检验出变异模型,表明测试用例是有效的.
Droute变异算子、变异模型数量及变异测试结果的变异评分见表5. 从表5可知,在检测状态变异和事件表达式变异时,测试用例的变异评分均为1,结果表明,测试用例发现了绝大多数的变异,检测错误的能力较好.
表 5 测试用例评估Table 5. Test case evaluation变异算子 变异描述 变异体数量/个 发现变异体数量/个 变异评分 迁移变异 增加或减少迁移 20 12 0.6 状态变异 增加或减少状态 10 10 1.0 事件表达式变异 改变事件表达式内容 15 15 1.0 6. 结 论
1) 针对高铁信号系统工程测试的特点,提出高铁信号系统工程测试复杂事件交互和状态同步的测试建模需求.
2) 在FSM建模理论的基础上,扩展出层次性、状态事件和FINAL属性,提出扩展有限状态机描述信号系统工程测试需求.
3) 提出将扩展有限状态机转换为UPPAAL TA的算法,利用UPPAAL算法自动生成测试用例.
4) 以高铁信号系统工程测试中的进路控制为例,建立测试模型并生成测试用例. 相比时间自动机建模方法,扩展有限状态机描述能力更强;采用变异分析对测试用例进行评估,结果表明测试用例发现了绝大多数变异.
-
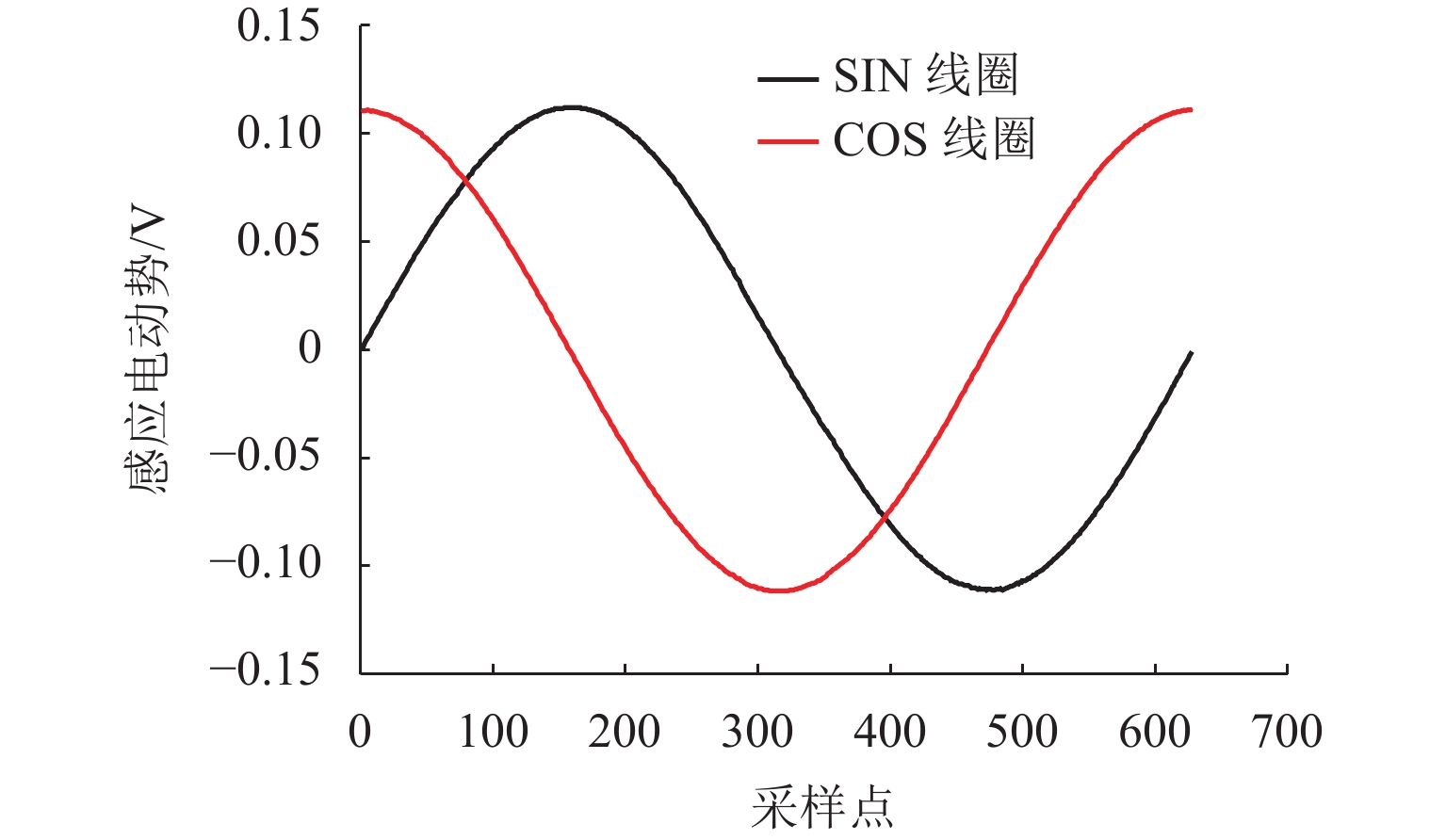
图 7 一个栅距的SIN/COS感应线圈感应电动势
Figure 7. Induced electromotive force of SIN/COS induction coil in single-pitch movement
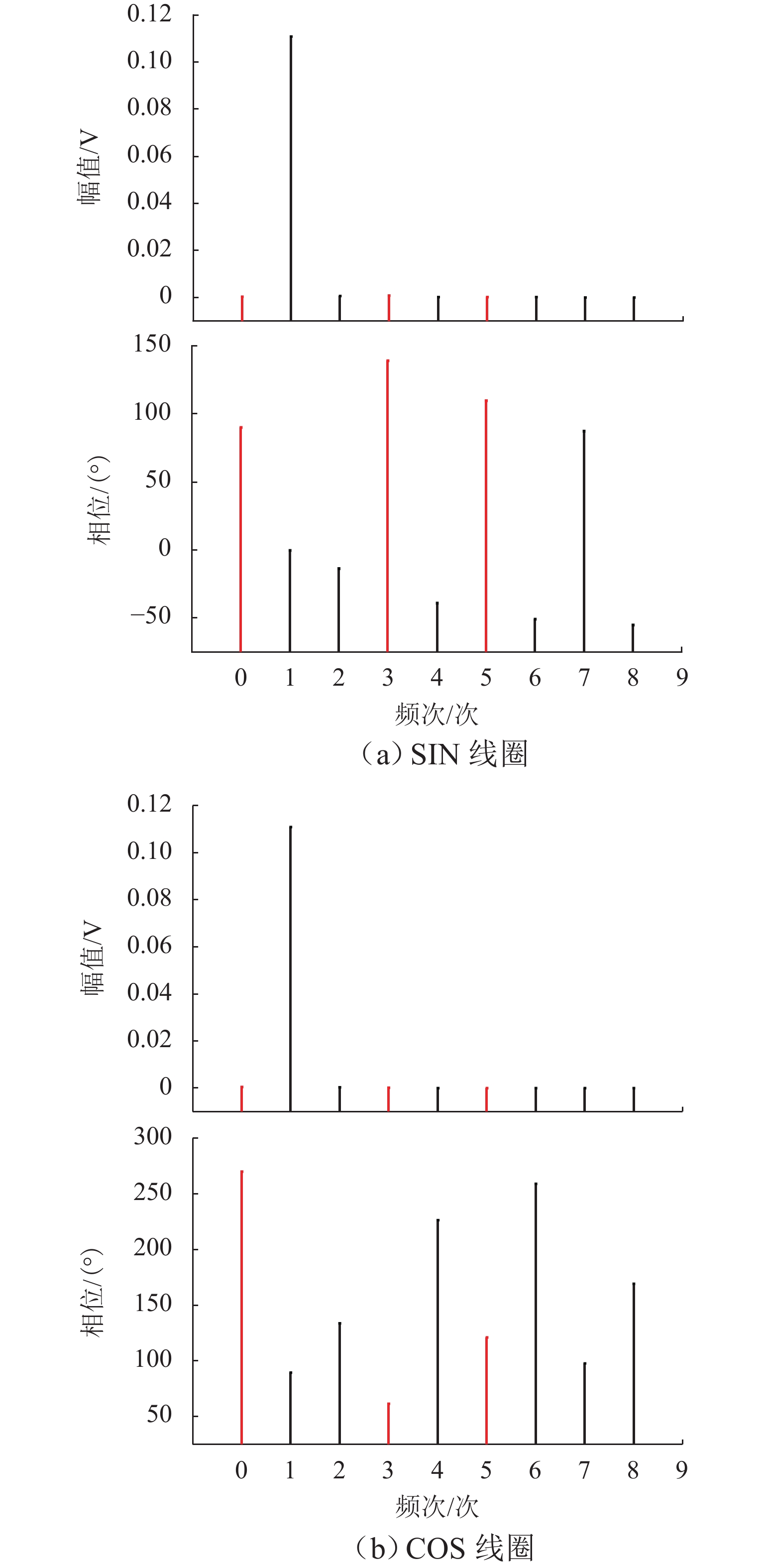
图 8 感应电动势的幅频、相频图
Figure 8. Amplitude- and phase-frequencies of induced electromotive force
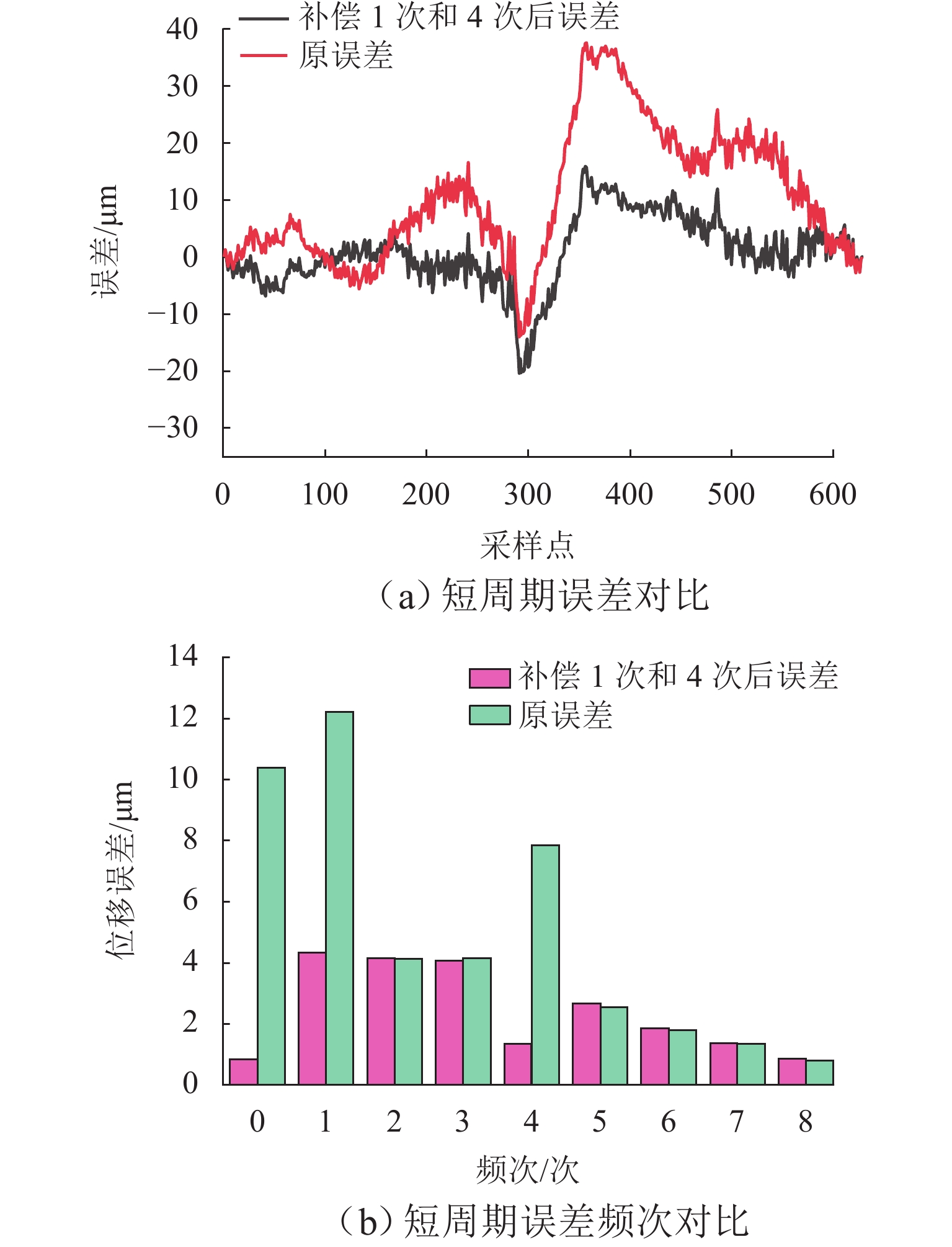
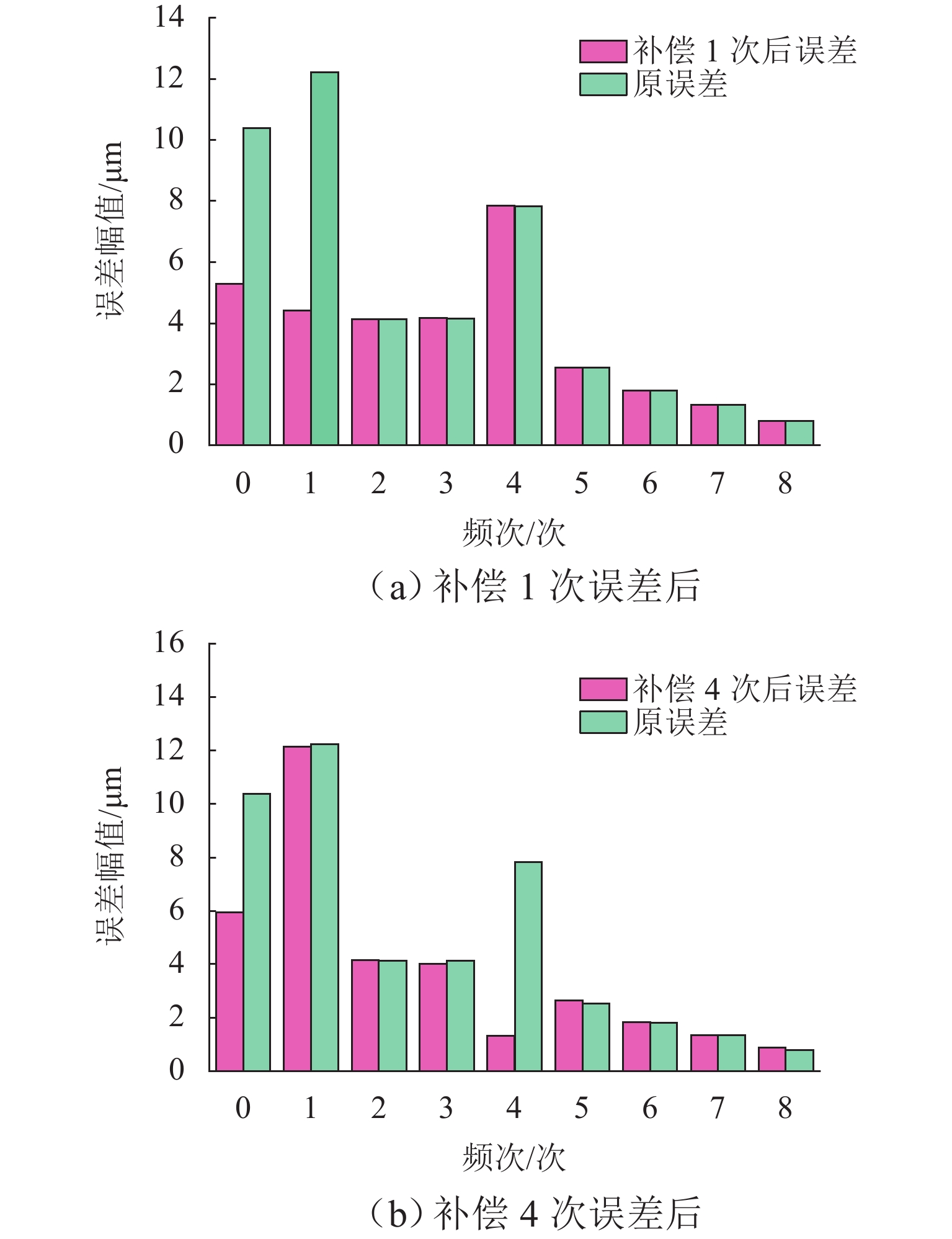
图 10 补偿1次和4次误差后的短周期误差和误差频次对比
Figure 10. Comparison of short-period errors and error frequencies after compensating for first-order and fourth-order errors
表 1 误差函数
Table 1. Error functions
误差频次/次 误差函数 1 $0.008\;3\sin \left( { - \dfrac{ { { {2\text{π} } }x} }{L} - 0.665} \right)$ 4 $0.006\;7\sin \left( {4 \times \dfrac{ { { {2\text{π} } }x} }{L} + 5.568} \right)$  下载: 导出CSV
下载: 导出CSV
-
[1] 高宏力,孙弋,郭亮,等. 机械加工质量预测研究现状与发展趋势[J]. 西南交通大学学报,2024,59(1): 120-141.GAO hongli, SUN yi, GUO liang, et al. Research status and development trend of machining quality prediction[J]. Journal of Southwest Jiaotong University, 2024, 59(1): 120-141. [2] 彭珍瑞,张楠,殷红,等. 基于频响函数的动车组构架传感器优化布置[J]. 西南交通大学学报,2019,54(2): 402-407,414.PENG Zhenrui, ZHANG Nan, YIN Hong, et al. Optimal sensor placement of EMU frame based on frequency response function[J]. Journal of Southwest Jiaotong University, 2019, 54(2): 402-407,414. [3] 魏正杰,张迪,吴冠豪. 用于精密位移测量的微型光栅传感器开发[J]. 光子学报,2021,50(9): 9-19.WEI Zhengjie, ZHANG Di, WU Guanhao. Development of miniature optical encoder for precise displacement measurement[J]. Acta Photonica Sinica, 2021, 50(9): 9-19. [4] 张周强,周玲,郭忠超,等. 基于电驱动纳米光栅的结构设计及仿真分析[J]. 光学学报,2021,41(21): 58-64.ZHANG Zhouqiang, ZHOU Ling, GUO Zhongchao, et al. Structure design and simulation analysis based on electrically driven nanograting[J]. Acta Optica Sinica, 2021, 41(21): 58-64. [5] 王亮亮,商正君,郑立新,等. 基于激光干涉仪对天文底片扫描仪气浮式运动平台的性能测试[J]. 计算机测量与控制,2021,29(12): 79-83. doi: 10.16526/j.cnki.11-4762/tp.2021.12.015WANG Liangliang, SHANG Zhengjun, ZHENG Lixin, et al. Performance test of air-bearing motion platform applied by astronomical plates digitizer based on laser interferometer[J]. Computer Measurement & Control, 2021, 29(12): 79-83. doi: 10.16526/j.cnki.11-4762/tp.2021.12.015 [6] 朱记全,许候杰. 基于激光干涉仪测量内径千分尺示值误差方法的探讨[J]. 精密制造与自动化,2021(4): 58-60. doi: 10.3969/j.issn.1009-962X.2021.4.jmzzyzdh202104014ZHU Jiquan, XU Houjie. Discussion on the method of measuring the indication error of inside micrometer based on laser interferometer[J]. Precise Manufacturing & Automation, 2021(4): 58-60. doi: 10.3969/j.issn.1009-962X.2021.4.jmzzyzdh202104014 [7] ANIL KUMAR A S, ANANDAN N, GEORGE B, et al. Improved capacitive sensor for combined angular and linear displacement sensing[J]. IEEE Sensors Journal, 2019, 19(22): 10253-10261. doi: 10.1109/JSEN.2019.2929538 [8] ZENG T, LU Y F, LIU Y M, et al. A capacitive sensor for the measurement of departure from the vertical movement[J]. IEEE Transactions on Instrumentation and Measurement, 2016, 65(2): 458-466. doi: 10.1109/TIM.2015.2490806 [9] LIU X K, HUANG R, YU Z C, et al. A high-accuracy capacitive absolute time-grating linear displacement sensor based on a multi-stage composite method[J]. IEEE Sensors Journal, 2021, 21(7): 8969-8978. doi: 10.1109/JSEN.2021.3054165 [10] 孟瑶,周启武,郑方燕,等. 纳米时栅的电气参数与误差特性研究[J]. 重庆理工大学学报(自然科学),2019,33(6): 65-71.MENG Yao, ZHOU Qiwu, ZHENG Fangyan, et al. Study on electrical parameters and error characteristics of nanometer time-grating[J]. Journal of Chongqing University of Technology (Natural Science), 2019, 33(6): 65-71. [11] 杨帆. 绝对式光栅尺可靠性研究与误差分析[D]. 北京: 中国科学院大学, 2021. [12] 王璐钰,李玉琼,蔡榕. 空间激光干涉仪激光抖动噪声抑制研究[J]. 中国光学,2021,14(6): 1426-1434.WANG Luyu, LI Yuqiong, CAI Rong. Noise suppression of laser jitter in space laser interferometer[J]. Chinese Optics, 2021, 14(6): 1426-1434. [13] NIHTIANOV S. Reactive sub-nanometer displacement sensors: advantages and limitations[C]//2013 Africon. Pointe aux Piments, Mauritius. [S.l.]: IEEE, 2014: 1-6. [14] 荣锋,韩信,郭翠娟. 基于电涡流传感器的微位移测量系统的设计[J]. 仪表技术与传感器,2020(9): 12-18.RONG Feng, HAN Xin, GUO Cuijuan. Design of micro-displacement measurement system based on eddy current sensor[J]. Instrument Technique and Sensor, 2020(9): 12-18. [15] 田敏,范青. 浅析电涡流位移传感器低温环境下输出的特性[J]. 仪器仪表标准化与计量,2021(4): 46-48. doi: 10.3969/j.issn.1672-5611.2021.04.022TIAN Min, FAN Qing. Analysis of the output characteristics of eddy current displacement sensor in low temperature environment[J]. Instrument Standardization & Metrology, 2021(4): 46-48. doi: 10.3969/j.issn.1672-5611.2021.04.022 [16] 朱巧荣,张卫平. “直线式感应同步器—鉴相型系统”原理仿真实验CAI[J]. 机床与液压,2001,29(3): 102.ZHU Qiaorong, ZHANG Weiping. CAI of principle simulation experiment of “linear inductosyn-phase discrimination system”[J]. Machine Tool & Hydraulics, 2001, 29(3): 102. [17] 曾乐乐. 直线式感应同步器[J]. 科技风,2018(34): 144. doi: 10.19392/j.cnki.1671-7341.201834127ZENG Leyue. Linear inductosyn[J]. Technology Wind, 2018(34): 144. doi: 10.19392/j.cnki.1671-7341.201834127 [18] 柏受军,杨元园,王鸣,等. 基于ADμC845的LVDT位移传感器非线性补偿[J]. 传感技术学报,2013,26(4): 541-544. doi: 10.3969/j.issn.1004-1699.2013.04.020BAI Shoujun, YANG Yuanyuan, WANG Ming, et al. Nonlinear compensation of LVDT displacement sensor based on ADμC845[J]. Chinese Journal of Sensors and Actuators, 2013, 26(4): 541-544. doi: 10.3969/j.issn.1004-1699.2013.04.020 [19] 郁明辉,李鹏,刘肖肖. 双余度LVDT位移传感器输出电压线性度研究[J]. 电子测量技术,2020,43(2): 26-32. doi: 10.19651/j.cnki.emt.1903331YU Minghui, LI Peng, LIU Xiaoxiao. Research on linearity of output voltage of double redundancy LVDT displacement sensor[J]. Electronic Measurement Technology, 2020, 43(2): 26-32. doi: 10.19651/j.cnki.emt.1903331 [20] ASCHENBRENNER B, ZAGAR B G. Analysis and validation of a planar high-frequency contactless absolute inductive position sensor[J]. IEEE Transactions on Instrumentation and Measurement, 2015, 64(3): 768-775. doi: 10.1109/TIM.2014.2348631 [21] TANG Q F, WU L, CHEN X H, et al. An inductive linear displacement sensor based on planar coils[J]. IEEE Sensors Journal, 2018, 18(13): 5256-5264. doi: 10.1109/JSEN.2018.2839730 [22] 高文政,石洪,汤其富. 平面磁场式绝对角度传感器的误差产生机理与抑制方法研究[J]. 重庆理工大学学报(自然科学),2021,35(6): 113-121.GAO Wenzheng, SHI Hong, TANG Qifu. Study on the error production mechanism and suppression methods of the planar inductive absolute angle sensor[J]. Journal of Chongqing University of Technology (Natural Science), 2021, 35(6): 113-121. [23] 刘洋,武亮,彭东林,等. 平面线圈型时栅传感器及动尺姿态误差特性分析[J]. 仪表技术与传感器,2020(11): 21-27,32. doi: 10.3969/j.issn.1002-1841.2020.11.005LIU Yang, WU Liang, PENG Donglin, et al. Analysis of attitude error characteristics of planar coil time grating sensor and moving ruler[J]. Instrument Technique and Sensor, 2020(11): 21-27,32. doi: 10.3969/j.issn.1002-1841.2020.11.005 [24] BABU A, GEORGE B. Design and development of a new non-contact inductive displacement sensor[J]. IEEE Sensors Journal, 2018, 18(3): 976-984. doi: 10.1109/JSEN.2017.2780835 [25] 翁道纛,汤其富,彭东林,等. 一种互补耦合型电磁感应式直线位移传感器的研究[J]. 传感技术学报,2019,32(7): 996-1002. doi: 10.3969/j.issn.1004-1699.2019.07.007WENG Daodao, TANG Qifu, PENG Donglin, et al. Research on a linear inductive displacement sensor with complementary coupling structure[J]. Chinese Journal of Sensors and Actuators, 2019, 32(7): 996-1002. doi: 10.3969/j.issn.1004-1699.2019.07.007 [26] SANDRA K R, ANIL KUMAR A S, GEORGE B, et al. A linear differential inductive displacement sensor with dual planar coils[J]. IEEE Sensors Journal, 2019, 19(2): 457-464. doi: 10.1109/JSEN.2018.2877209 [27] GU X Y, TANG Q F, PENG D L, et al. An inductive linear displacement sensor with bilateral sensing units[J]. IEEE Sensors Journal, 2021, 21(1): 296-305. doi: 10.1109/JSEN.2020.3014674 [28] ZHAO J, LI M, PENG S, et al. An inductive linear displacement sensor with complementary resonant coupling units[J]. IEEE Sensors Journal, 2021, 21(22): 25659-25667. doi: 10.1109/JSEN.2021.3118839 -

 下载:
下载:

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 283
- HTML全文浏览量: 105
- PDF下载量: 58
- 被引次数: 0