

Design and Magnetic Force Characteristic Analysis of Magnetic Levitation Bearing for Artificial Kidney Pumps
-
摘要:
代替透析膜的持续离心分离新方法提高了依赖血液透析治疗的肾脏病患者生活质量,随之,人工肾脏泵的研究被很多学者关注. 但传统人工肾脏泵采用滚动轴承进行支撑,存在溶血高、血栓率高等问题,为此,本文利用磁悬浮轴承的非接触、无润滑、高转速等优点,研发了一种应用于人工肾脏泵的结构紧凑且节能的单自由度控制型磁悬浮轴承. 利用有限元分析软件进行仿真,探索径向被动控制部分和轴向主动控制部分的设计参数,并对总体进行仿真验证,进而对磁悬浮轴承进行结构性能评估. 结果表明:仿真与实验的径向位移刚度系数分别为47.432 N/mm和49.531 N/mm,轴向电流刚度系数分别为0.144 N/AT和0.135 N/AT,轴向位移刚度系数为223.071 N/mm,满足该磁悬浮轴承的五自由度稳定悬浮要求;所设计的磁悬浮轴承简化了系统结构,减小了控制难度以及降低了系统功耗.
Abstract:The new method of continuous centrifugal separation instead of dialysis membrane has improved the quality of life of patients with kidney disease who depend on hemodialysis treatment. As a result, the research on artificial kidney pumps has been paid much attention by many scholars, but the conventional artificial kidney pump is supported by rolling bearings, and it thus causes problems such as high hemolysis and high thrombosis rate. In order to solve these problems, this paper developed a compact and energy-saving single-degree-of-freedom controlled magnetic levitation bearing applied to an artificial kidney pump by using the advantages of non-contact, non-lubrication, and high rotation speed of magnetic levitation bearing. The finite element analysis software was used for simulation to explore the design parameters of the radial passive control part and the axial active control part, and the overall simulation was verified. Then the structural performance of the magnetic levitation bearing was evaluated. The results show that the simulated and experimental radial displacement stiffness coefficients are 47.432 N/mm and 49.531 N/mm; the axial current stiffness coefficients are 0.144 N/AT and 0.135 N/AT, and the axial displacement stiffness coefficient is 223.071 N/mm, which meet the requirements of five-degree-of-freedom stable suspension of this magnetic levitation bearing. The designed magnetic levitation bearing simplifies the system structure, reduces the control difficulty, and lowers the power consumption of the system.
-
据2020年世界顶级医学期刊《柳叶刀》公布的全球慢性肾脏病流行医学报告显示[1]:截止到2017年,全球慢性肾脏病患者人数达6.975亿,中国患病人数达1.323亿. 肾脏病的治疗方法因病情的进展而异,由于受肾脏供体及费用的限制,仅有极少数患者可接受肾移植,使得病情严重的患者必须接受血液透析治疗来维持正常的生命需要. 因而血液透析成为治疗慢性肾脏病的最主要疗法[2]. 血液透析疗法从1913年被提出至今已有百年历史,透析器、透析膜分别是血液透析疗法最关键和最核心的部分. 但由于血液透析机器体积大、系统复杂,且患者每周都要去医院接受3次(每次4 h左右)治疗,且每做一次透析都要花费大量资金,给家庭的生活带来极大的负担,从而降低了患者的生活质量[3-7]. 因此,科研人员致力于研发更高科技、更便携、不影响工作、生活的人工肾.
Gura等[8]研发了一种腰带式的可穿戴式人工肾脏,这是一种基于透析液再生吸附剂技术的小型化、可穿戴式血液透析机. 但其经常与人体血管进行连接和断开操作,可能会增加感染的风险. 因此,为了进一步提高患者的生活质量,Ariyoshi等[9]提出了代替透析膜的持续离心分离新方法,开发了一种植入式离心分离新型人工肾,采用2级连续离心分离的方法,即第一阶段连续离心分离血细胞成分,第二阶段连续离心分离血浆中的蛋白质成分来连续生产原尿的方法. 然而,传统的人工肾脏离心泵仍然存在机械接触和润滑,是导致溶血高、血栓率高等问题的主要原因之一[10].
由于磁悬浮轴承的无摩擦、非接触,不需润滑和密封、高速高精度等一系列优点,特别适用于高速、真空、超净等特殊环境[11-14],在医疗器械、机械加工、航空航天等领域应用广泛,被公认为极有前途的新型轴承. 因此,国内外很多学者对磁悬浮轴承进行了研究:Asama等[15]开发了一种二自由度主动控制径向磁轴承的紧凑型离心式血泵,在主动控制和被动控制方向上,该磁轴承表现出高刚度;山东大学的关勇等[16]将磁悬浮轴承应用到人工血泵之中,并设计了径向永磁轴承和轴向电磁轴承相结合的磁悬浮系统. 尽管磁轴承应用广泛,但还存在着控制复杂、系统功耗大的问题.
针对传统血泵存在的问题,本文利用磁悬浮轴承的非接触、高转速等优点,开发一种结构紧凑、节能且适用于人工肾脏的磁悬浮轴承,该磁悬浮轴承是在结合永磁和电磁轴承优点的基础上制成的混合式磁悬浮轴承,并利用有限元分析软件进行仿真,对该磁悬浮轴承的结构进行性能评估.
1. 单自由度控制型磁悬浮轴承的结构
1.1 人工肾脏泵的结构
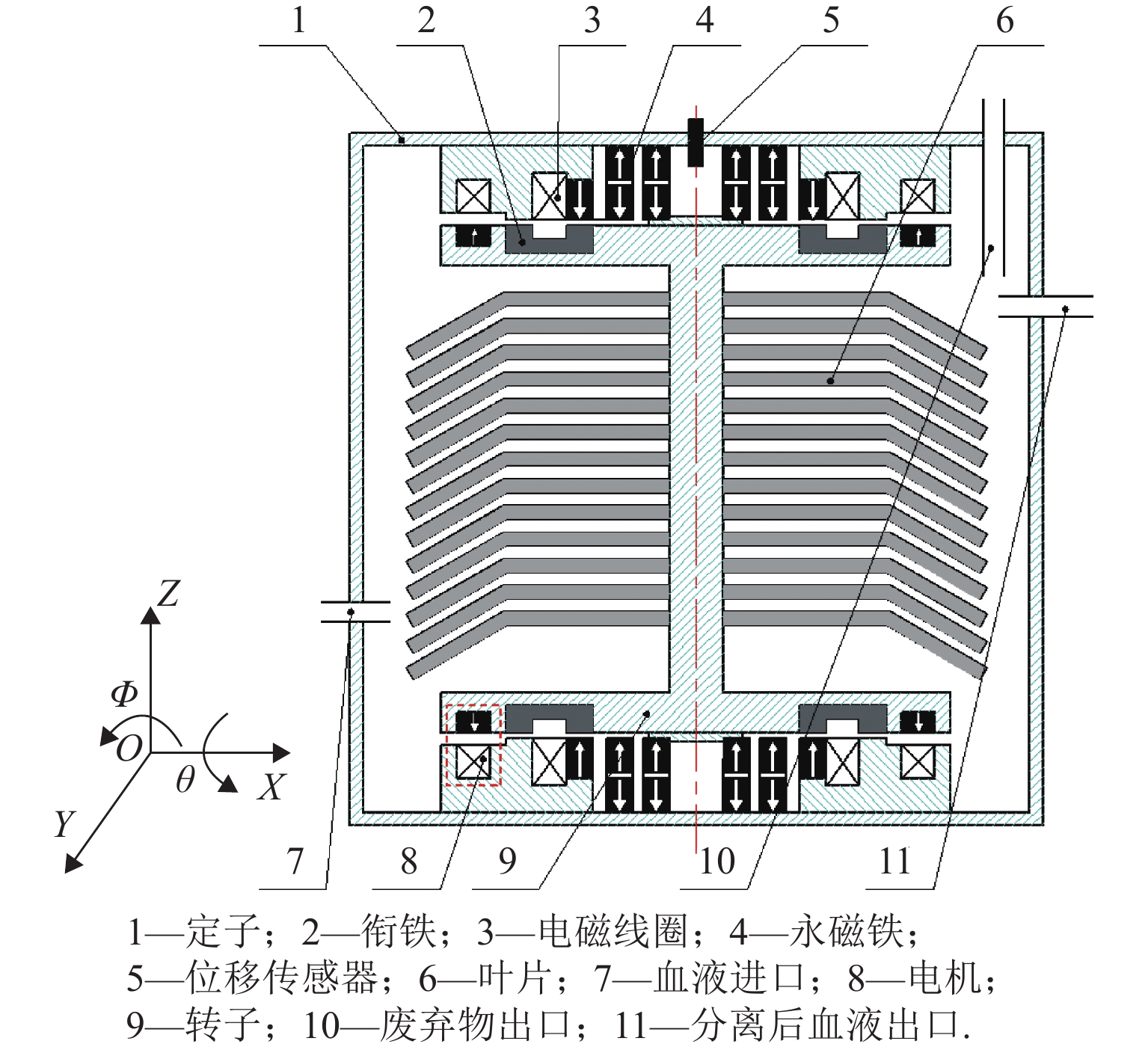
图1为人工肾脏泵的结构示意,图中:X为转子位移方向,Φ为偏转方向. 人工肾脏泵主要由磁悬浮轴承、磁悬浮电机、叶轮3部分组成. 其中:磁悬浮轴承由永磁铁和电磁线圈组成,叶轮由转子和叶片组成,位移传感器用来测转子位移.
1.2 单自由度控制型磁悬浮轴承的构成
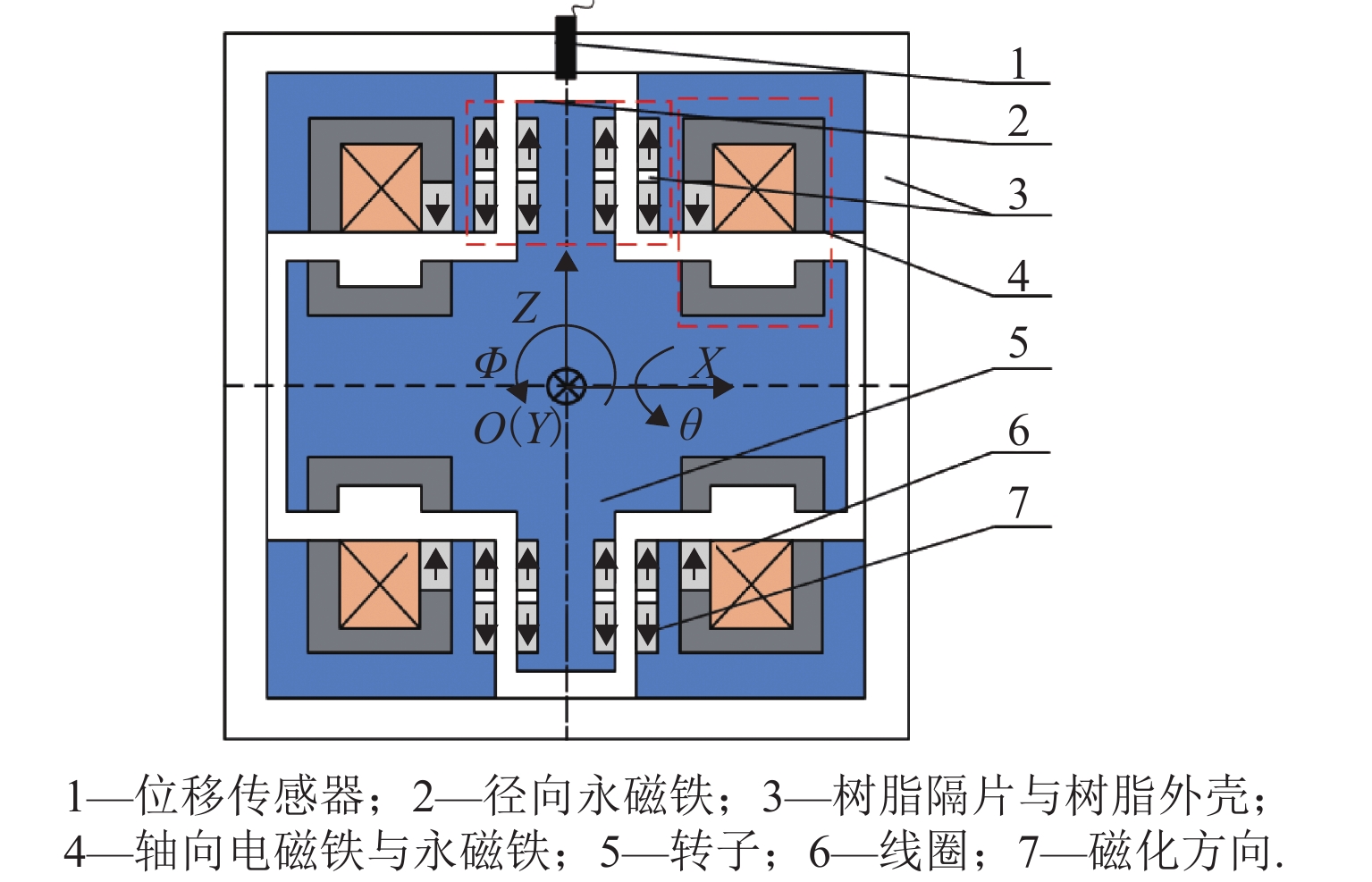
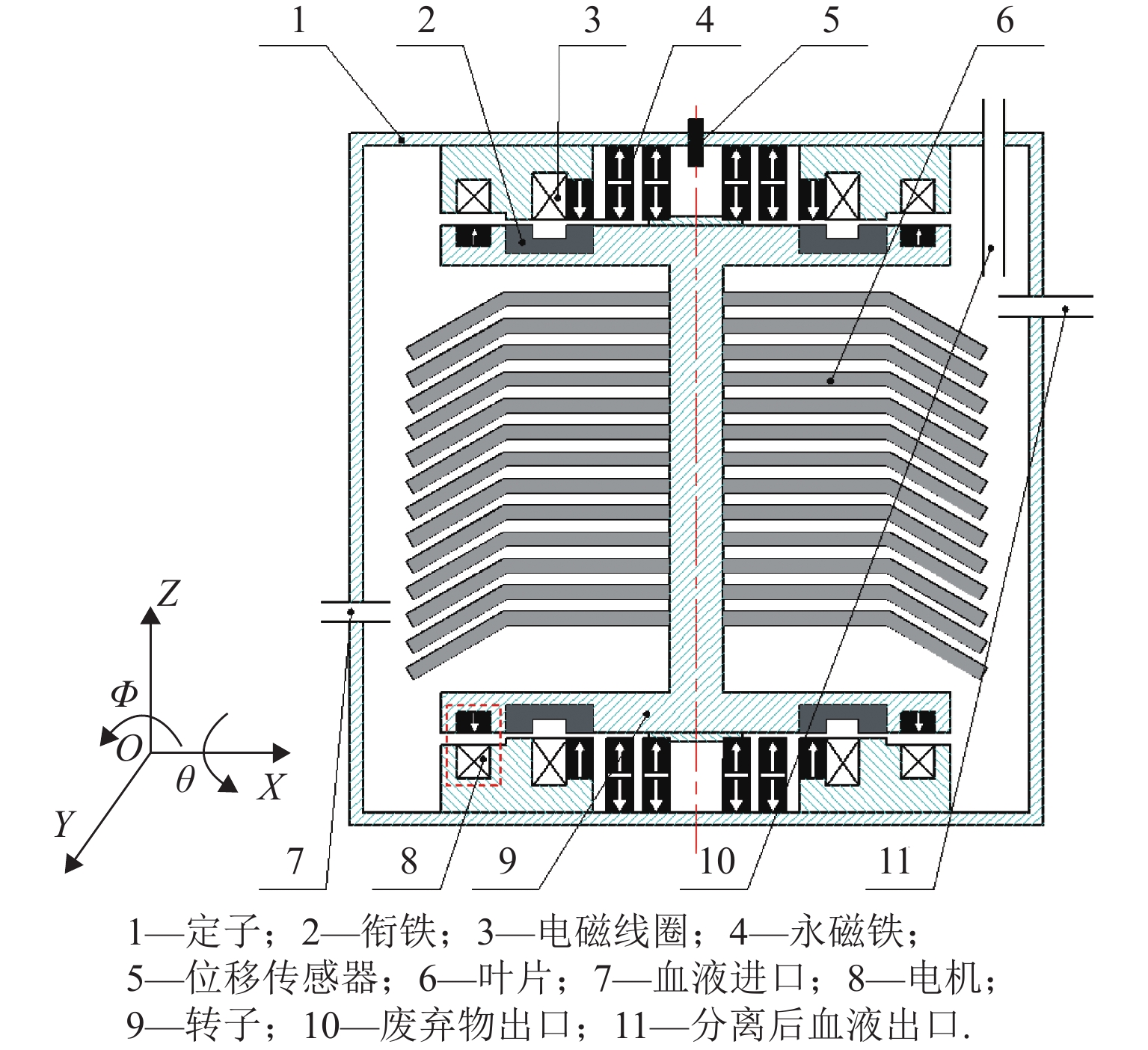
图2为单自由度控制型磁悬浮轴承的总体结构. 该磁悬浮轴承主要由径向永磁铁、轴向电磁铁与永磁铁、转子、电涡流位移传感器、树脂隔片与树脂外壳组成:磁悬浮轴承是可分为径向被动控制部分和轴向主动控制部分,其中,磁悬浮轴承径向被动控制部分是由4对磁化方向不同的永磁铁构成,且分别配置在转子和定子上下;磁悬浮轴承轴向主动控制是由2个轴向电磁铁以及2个磁化方向不同的永磁铁组成,且分别配置在定子的上、下,磁轭分布在转子上、下.
 图 2 单自由度控制型磁悬浮轴承Figure 2. Single-degree-of-freedom controlled magnetic levitation bearing
图 2 单自由度控制型磁悬浮轴承Figure 2. Single-degree-of-freedom controlled magnetic levitation bearing1.3 单自由度控制型磁悬浮轴承的工作原理
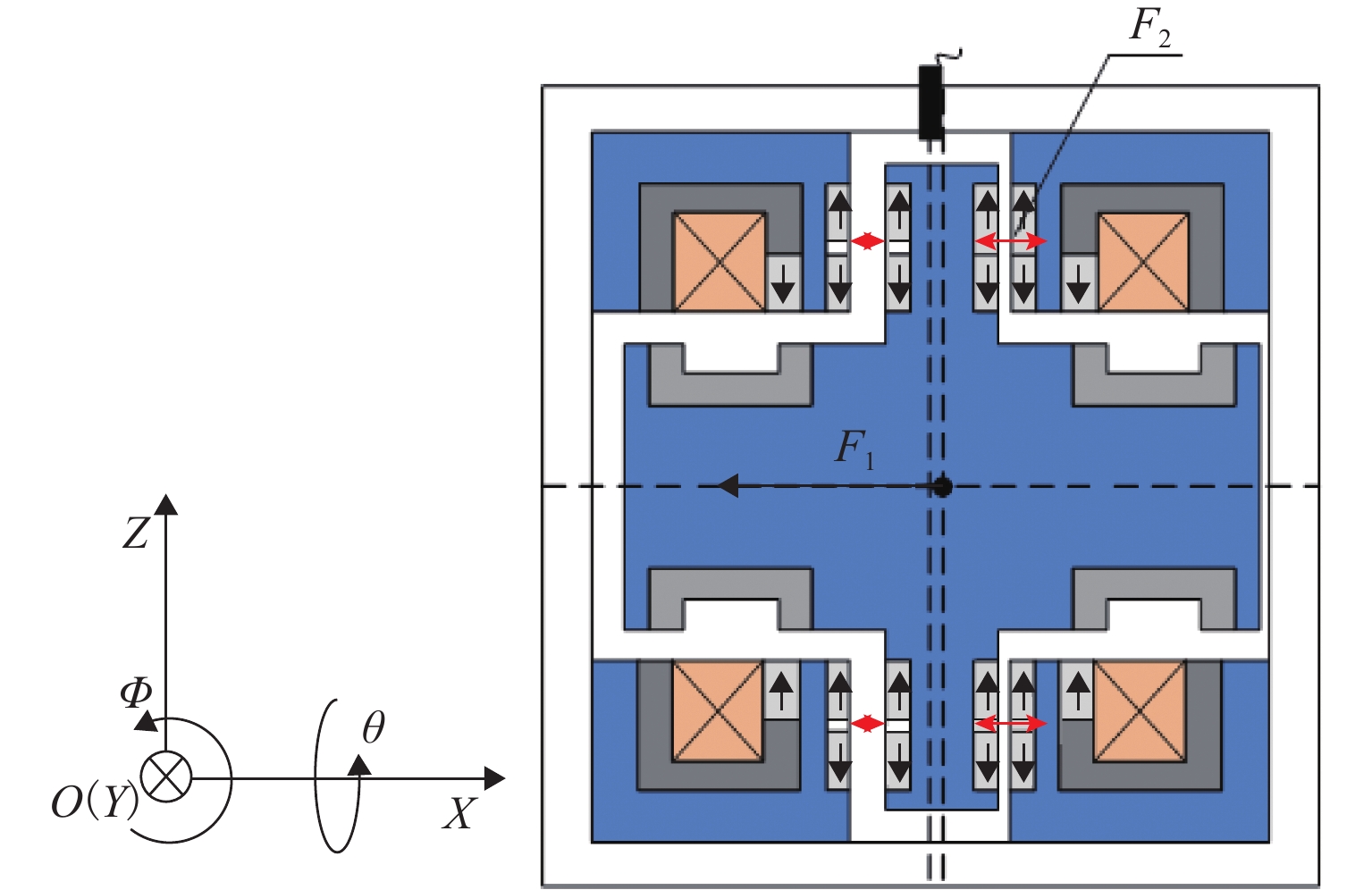
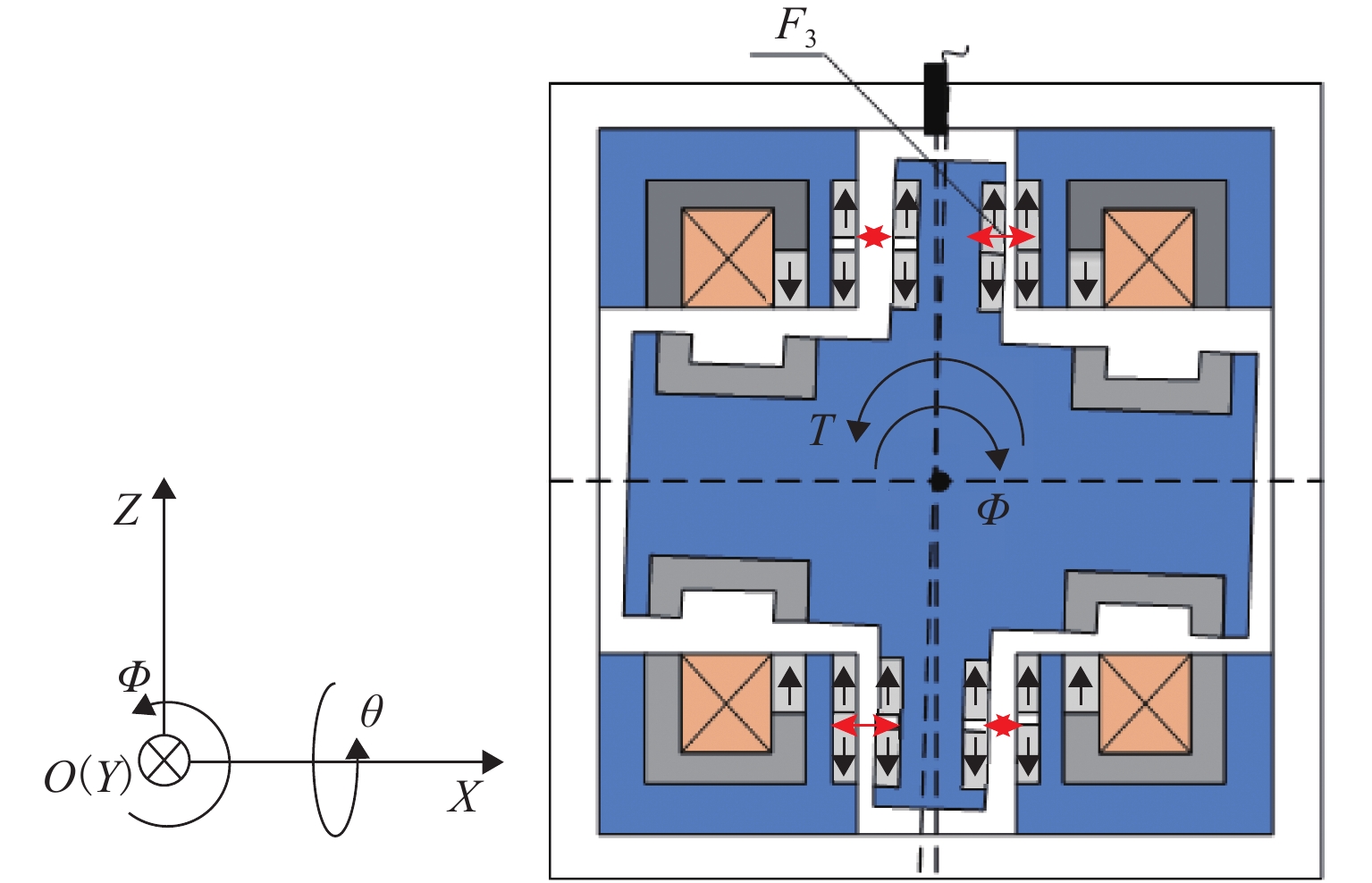
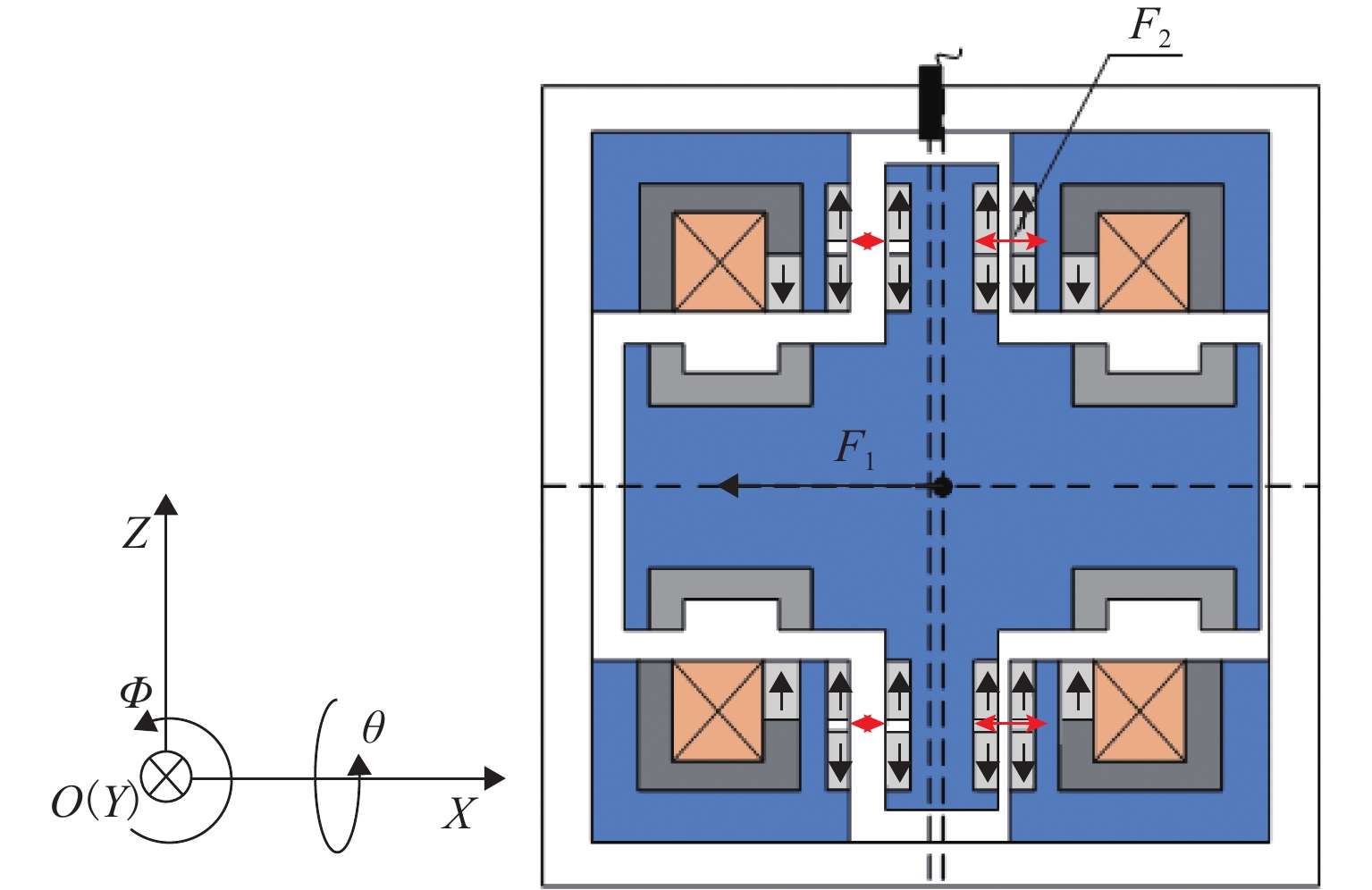
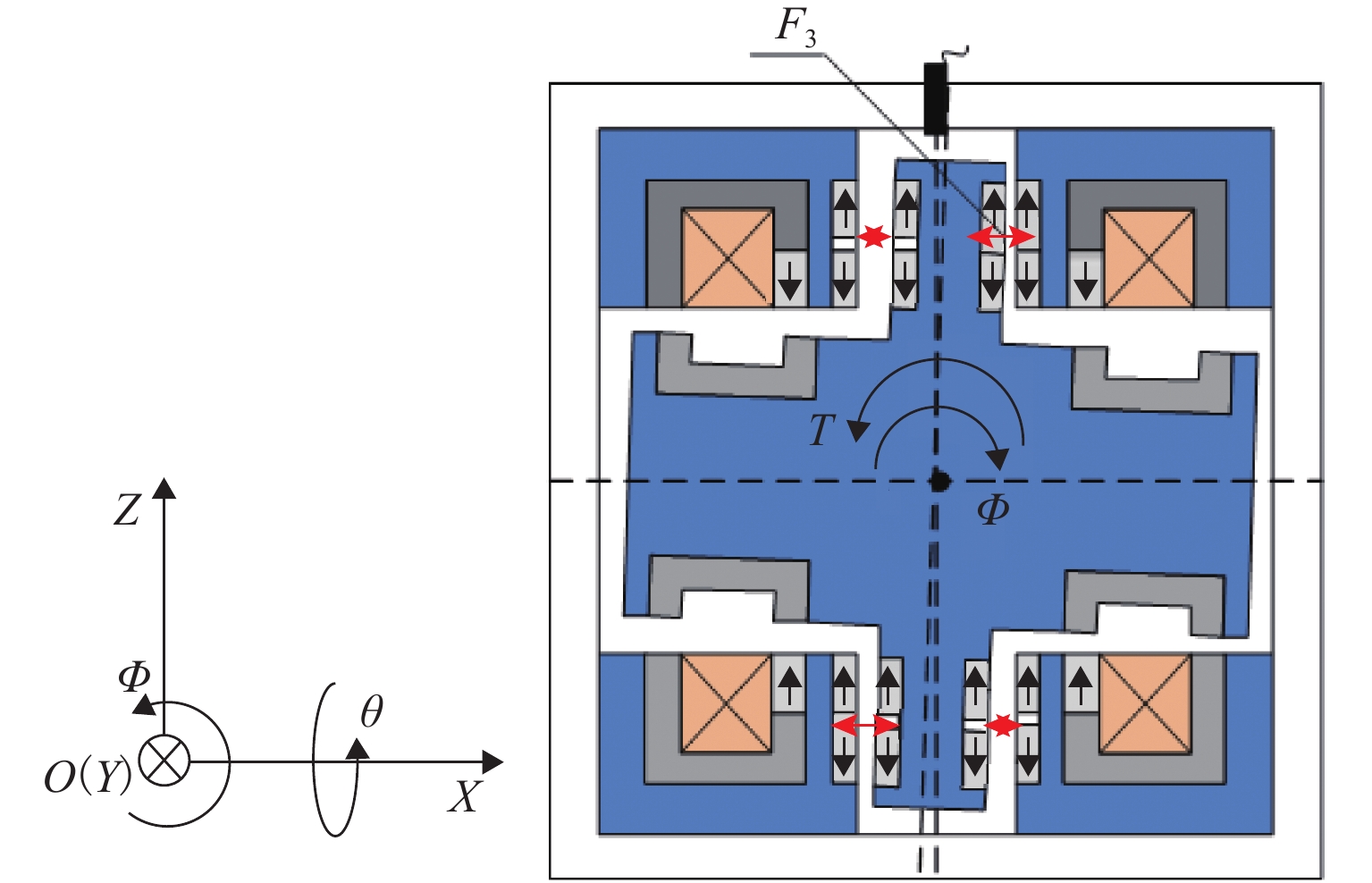
当转子沿X方向微位移时,使径向永磁体对之间的左右间隙发生变化,如图3所示. 图中:F1为恢复力,F2为排斥力. 径向永磁体对的右侧间隙变小,排斥力变大;径向永磁体对的左侧间隙变大,排斥力变小. 因此,左右侧排斥力之差产生恢复力会使转子向-X方向移动,从而使转子恢复到原来的位置. 另外,当转子沿Φ方向发生微小偏转时,同样会使径向永磁体对之间的左右间隙发生变化,如图4所示,图中:F3为转子偏转后产生的排斥力,T为恢复力矩. 径向永磁体对同样会产生恢复转矩使转子恢复到原来的位置. 当转子沿Z方向产生位移时,通过改变轴向电磁铁线圈中的电流,改变轴向永磁体的磁通量,实现转子稳定悬浮.
2. 单自由度控制型磁悬浮轴承的设计
未来可能会在所设计的该磁悬浮轴承转子内配置叶轮,同时考虑到开发泵嵌入体内的尺寸,因此,将该磁悬浮轴承的外形以直径80 mm,高度120 mm作为设计目标值.
2.1 单自由度控制型磁悬浮轴承径向被动控制
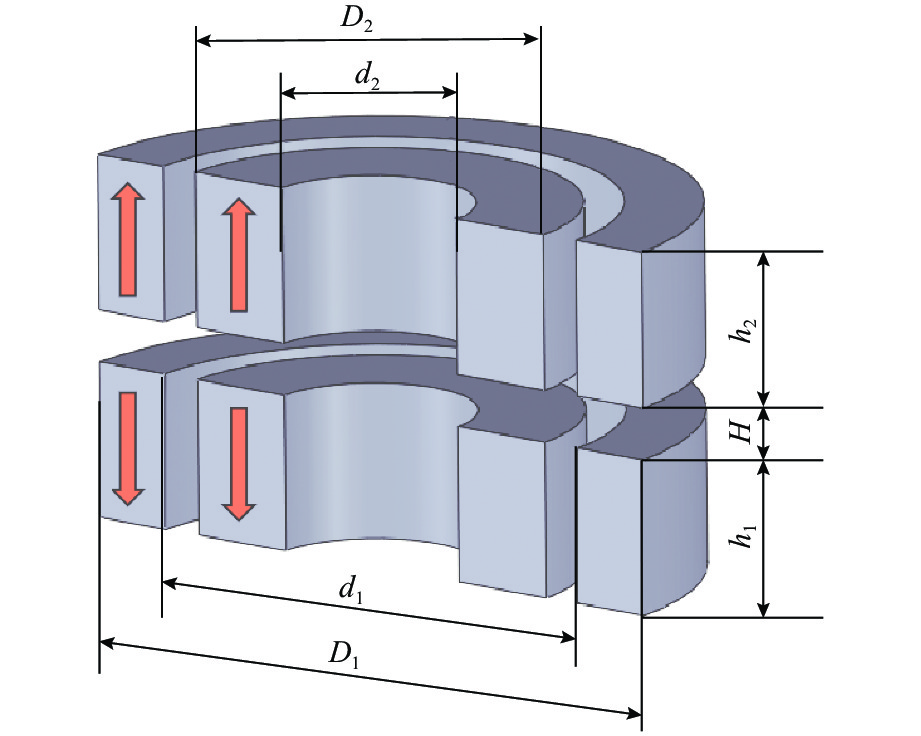
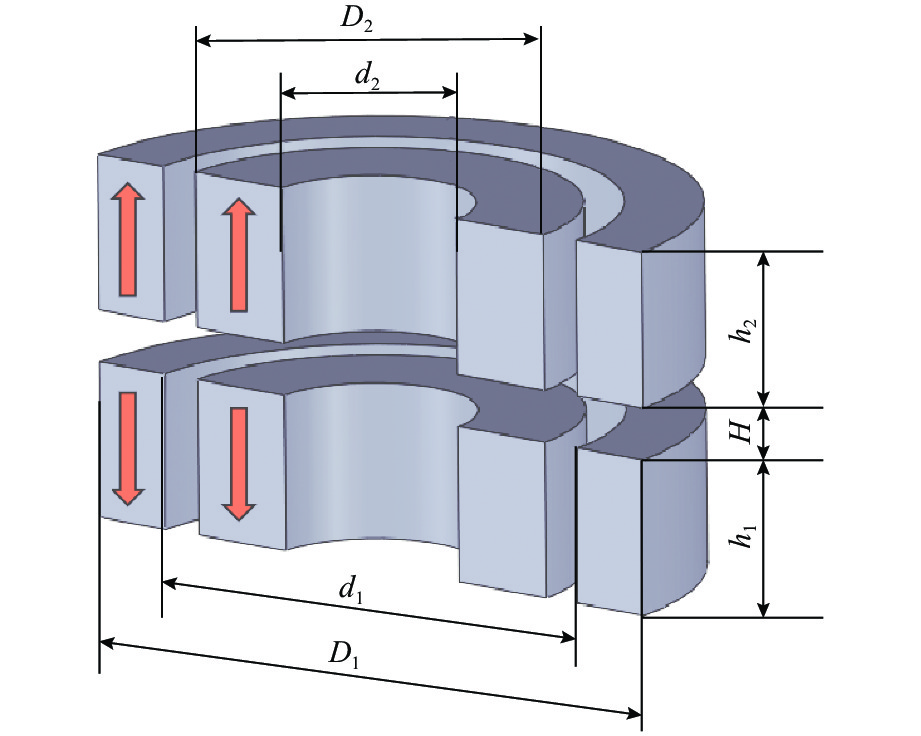
鉴于国外磁悬浮心脏泵10 N刚度可以在气体环境下保证无接触,本文开发的肾脏泵的重量约为心脏泵的2倍,考虑到设计冗余,该磁悬浮轴承径向被动控制以转子径向恢复力50 N,转子倾斜方向恢复扭矩20 Nm/rad为设计目标,利用有限元分析软件对磁悬浮轴承径向被动控制部分的结构进行参数设计,探索径向永磁体的尺寸. 该磁悬浮轴承是上下对称结构,故只仿真一半的模型. 具体的模型布置以及径向永磁铁的充磁方向如图5所示,具体参数定义如表1所示.
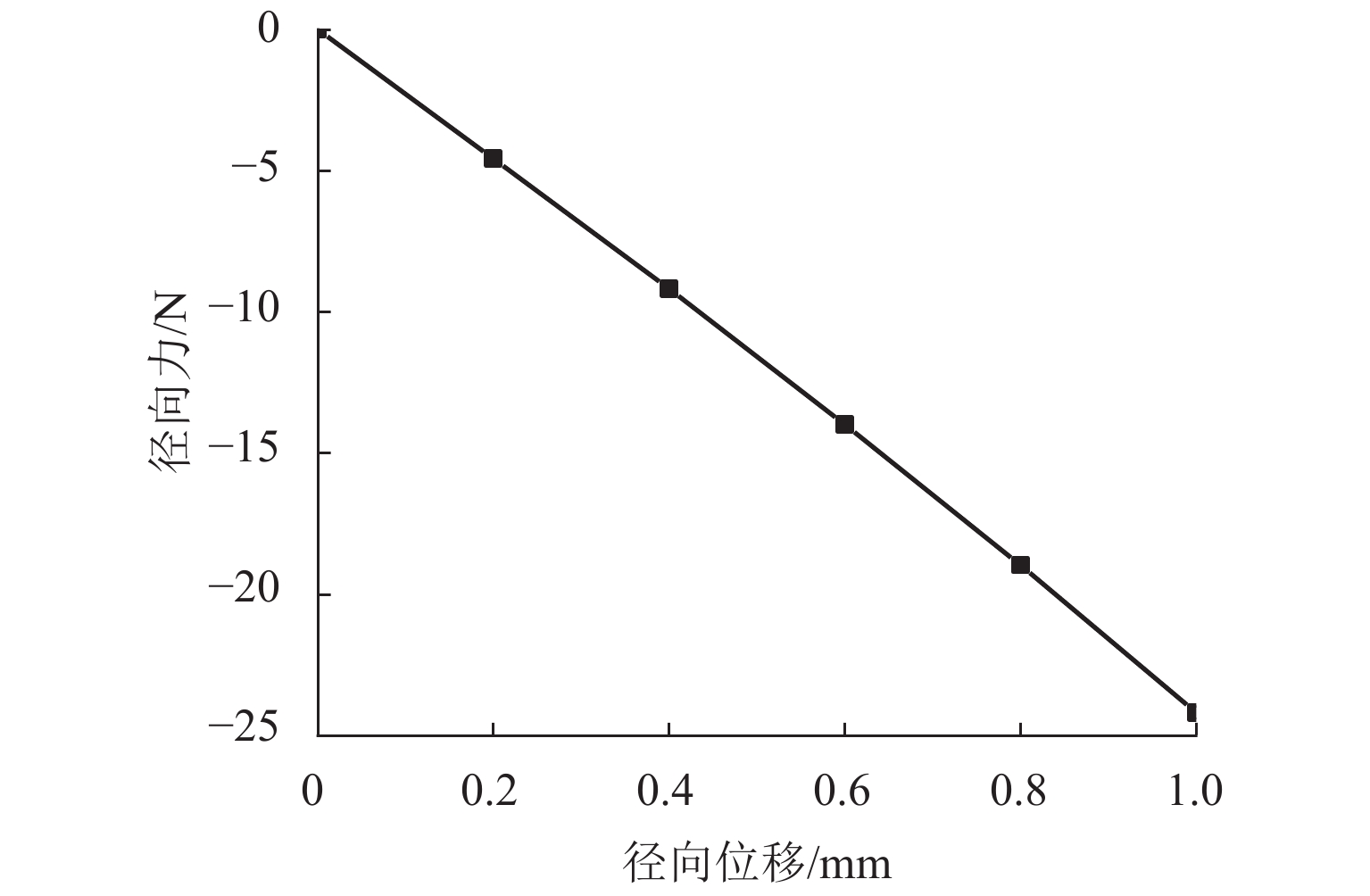
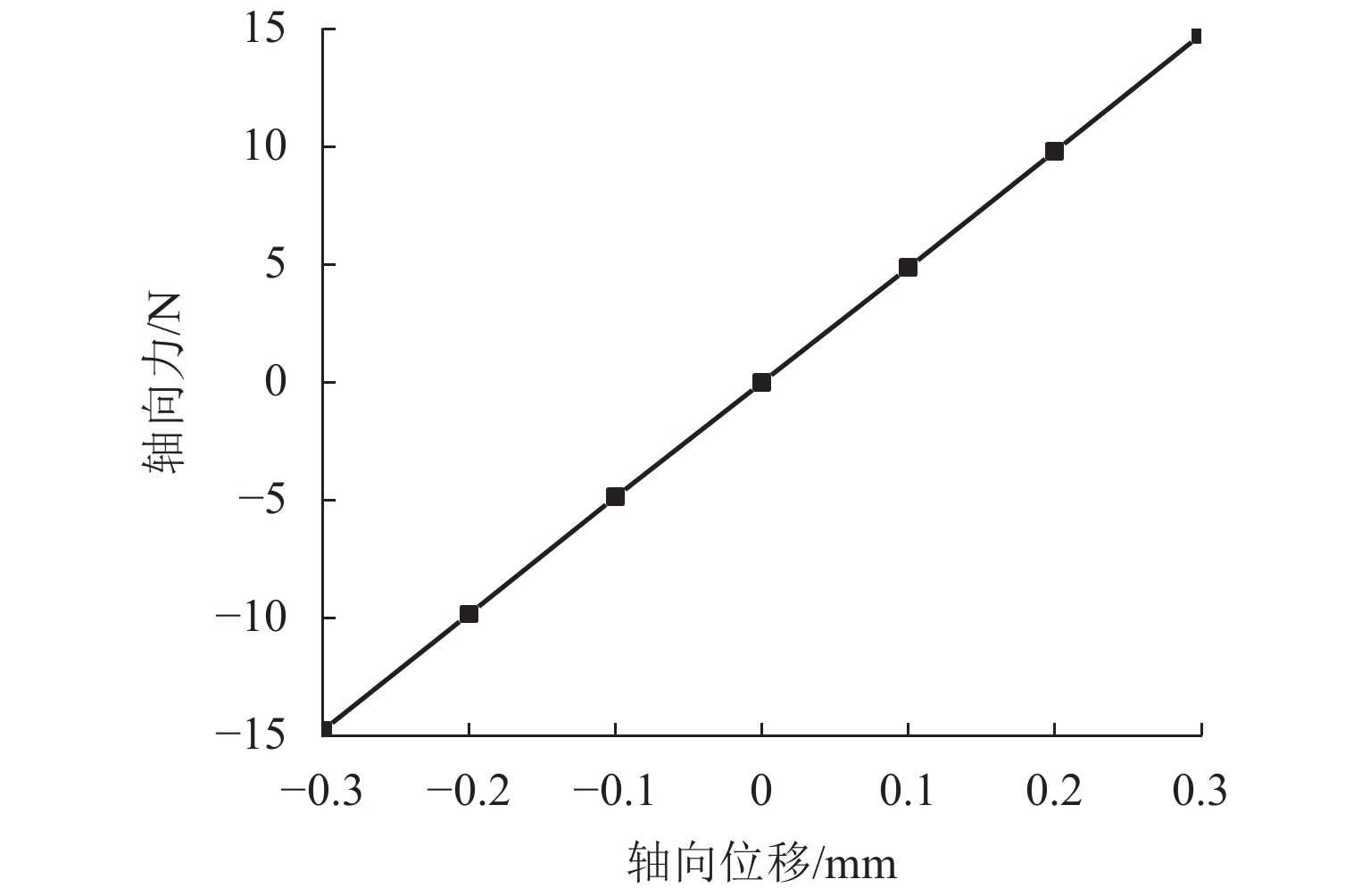
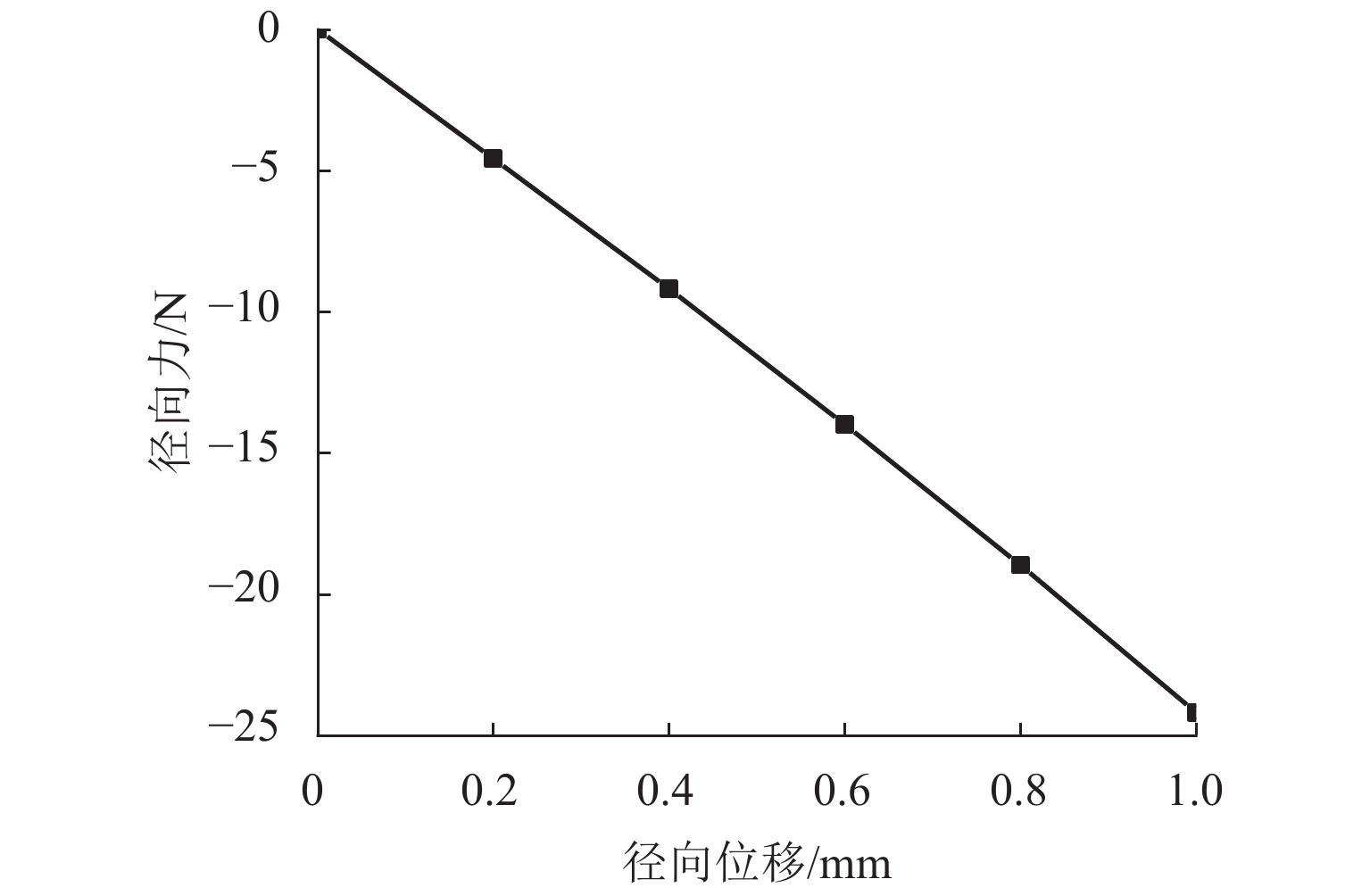
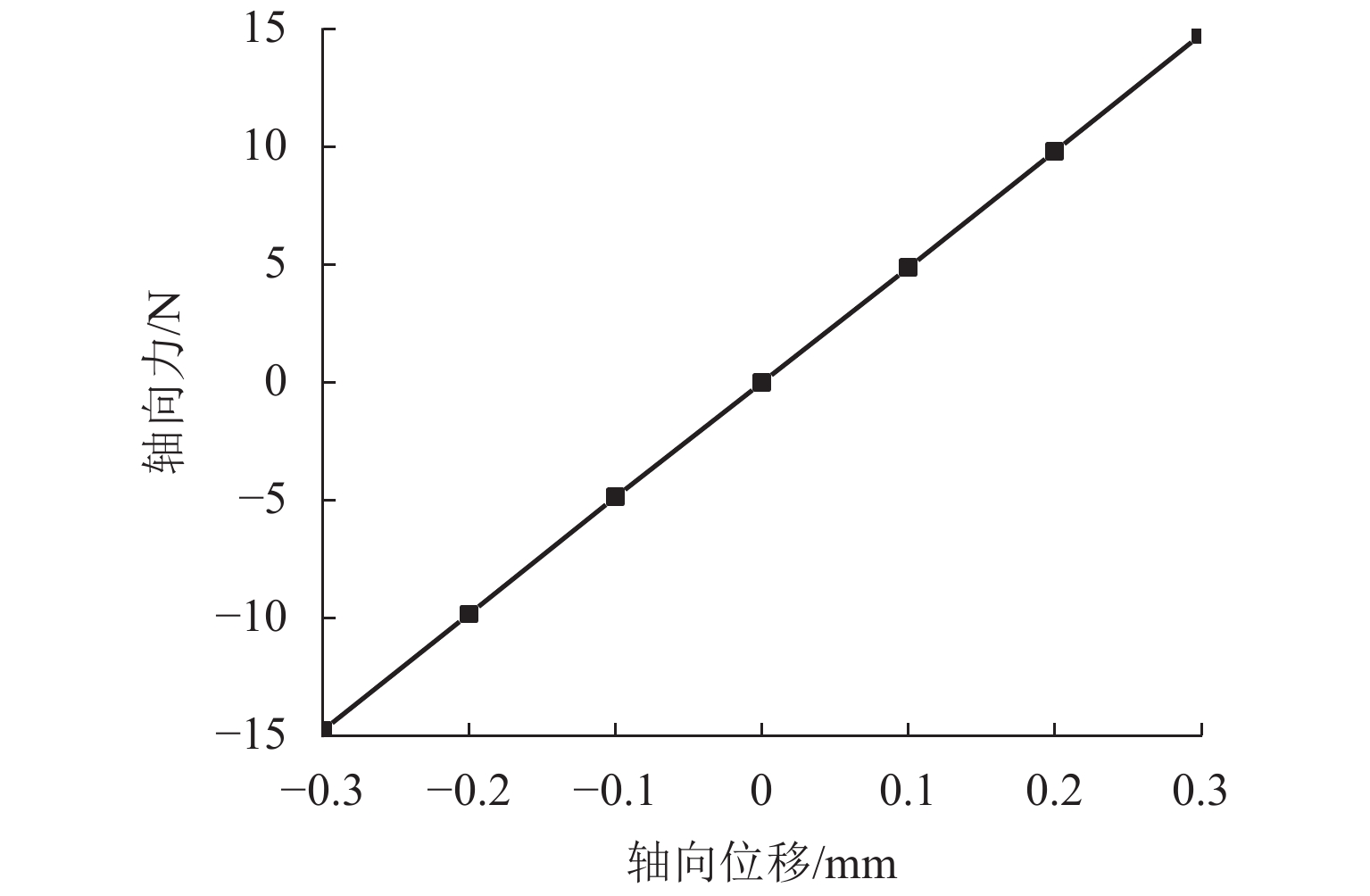
通过有限元软件进行仿真分析,仿真结果如图6、7所示. 图6为径向被动控制中,转子的径向位移与转子产生的径向力的关系. 图7为径向被动控制中,转子的轴向位移与转子产生的轴向力的关系.
表 1 径向永磁铁参数Table 1. Radial permanent magnet parameters参数 数值 定子永磁铁外径 D1/mm 25 定子永磁铁内径 d1/mm 19 定子永磁铁高度 h1/mm 6 动子永磁铁外径 D2/mm 16 动子永磁铁内径 d2/mm 8 动子永磁铁高度 h2/mm 6 两永磁铁的轴向间隙 H/mm 2 永磁铁间距/mm 1.5 永磁铁材料 钕铁硼 N52 由图6可知:转子的径向位移与转子所受到径向力近似呈线性关系,且转子的径向力与转子的径向位移成反比,进而验证了产生恢复力的原因. 由图7可知:转子的轴向位移与转子的轴向力近似呈线性关系,且转子的轴向力与转子的轴向位移成正比. 由于径向是对称结构,所以轴向力和径向力都是2倍. 转子在径向方向可以产生50 N左右的恢复力,且转子在轴向方向会产生30 N的轴向力,进而达到了本文的设计要求.
2.2 单自由度控制型磁悬浮轴承轴向主动控制
考虑到克服该磁悬浮轴承径向被动控制产生的轴向力以及转子本身的重力及转子的稳定控制,所以该磁悬浮轴承轴向主动控制以转子的轴向力80~100 N为设计目标,利用有限元分析软件对单自由度磁悬浮轴承轴向主动控制部分的结构进行参数设计,探索永磁体的尺寸参数和线圈的尺寸参数.
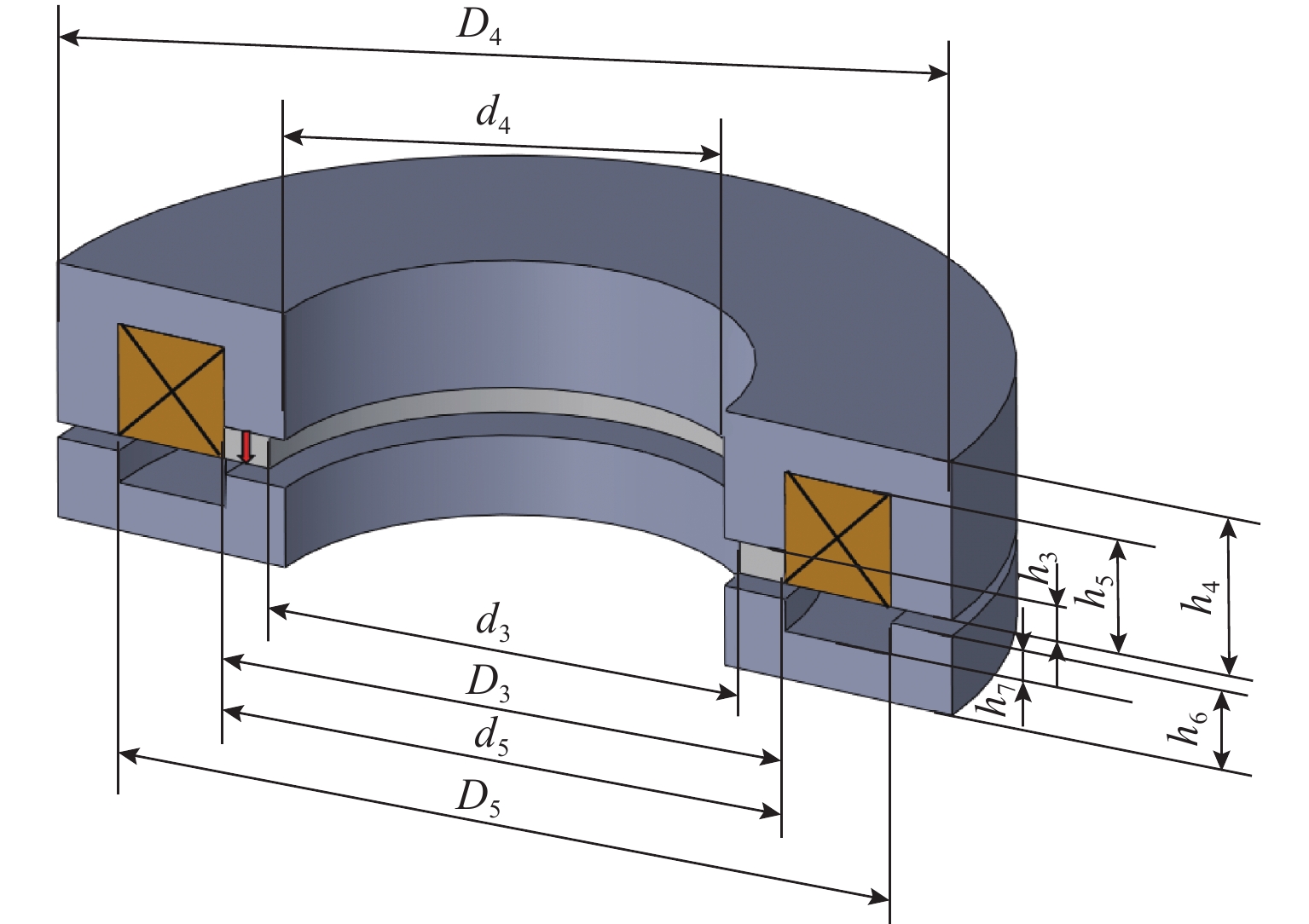
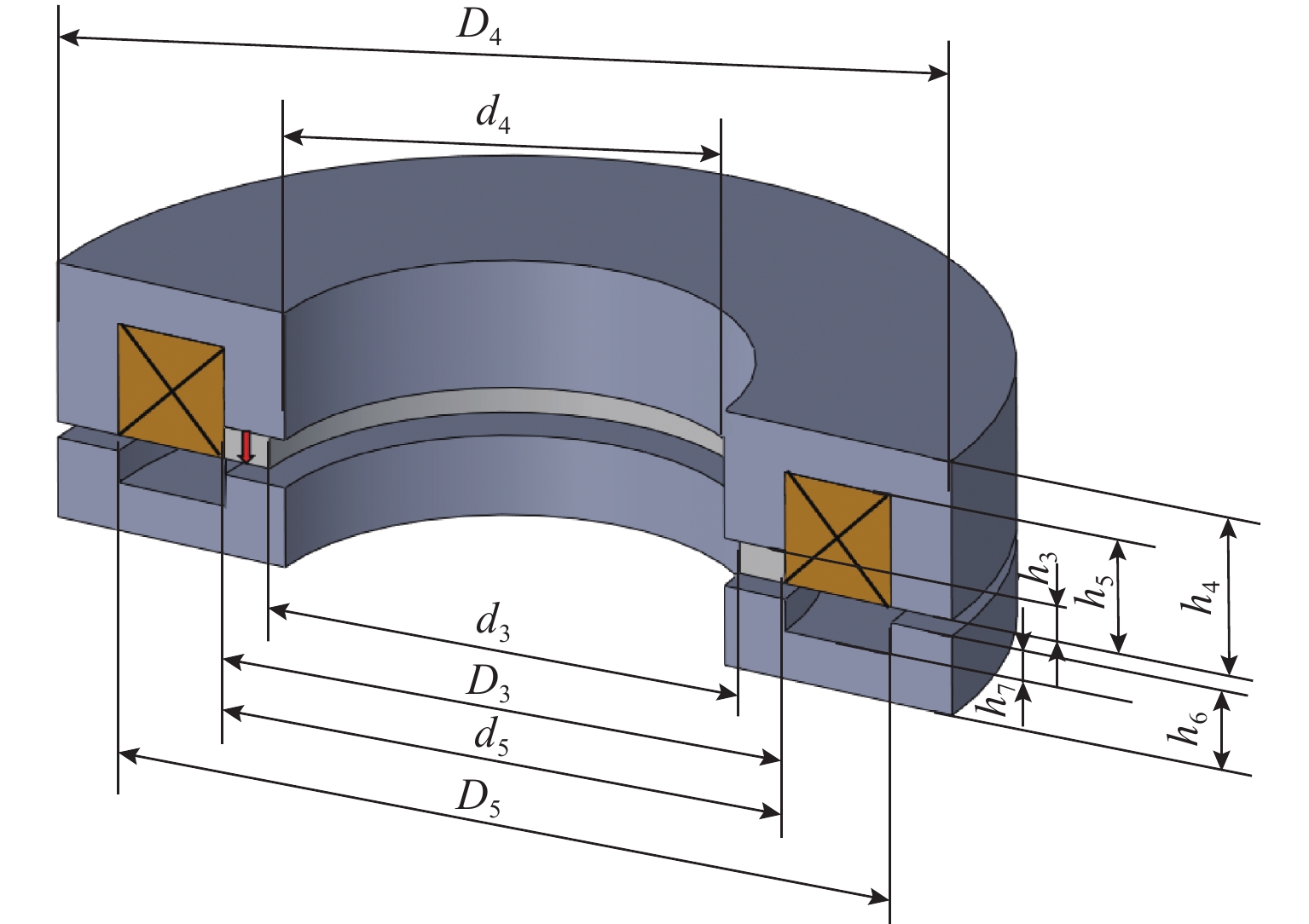
该磁悬浮轴承轴向主动控制结构是由电磁铁、永磁铁以及与转子相连衔铁(磁性材料)构成,其上半部分磁轭、永磁铁、线圈结构布置如图8所示,具体参数如表2. 轴向主动控制部分也是对称结构,所以下半部分的结构布置与上半部分关于X轴对称.
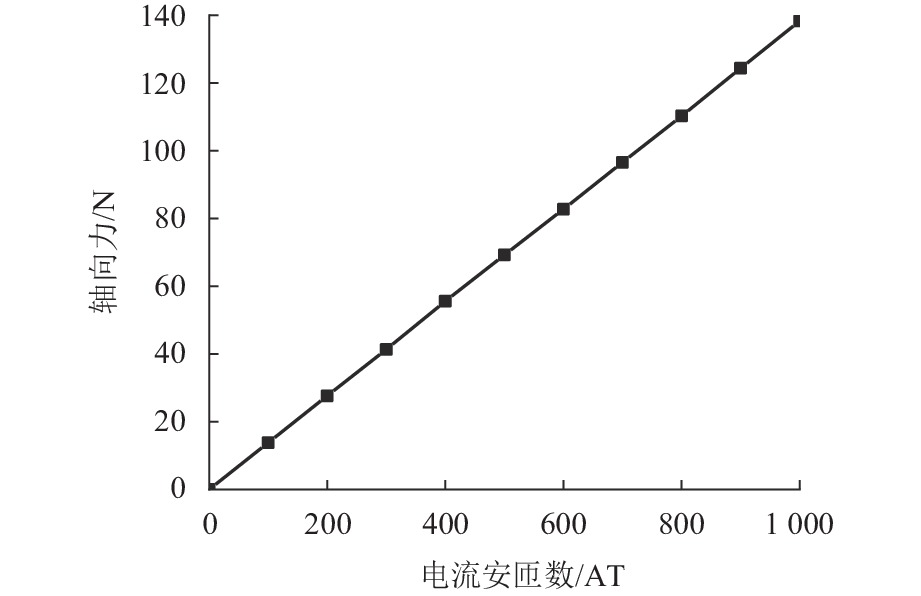
表 2 轴向主动控制结构参数Table 2. Structural parameters of axial active control参数 数值 永磁铁材料 钕铁硼 N33 永磁铁外径 D3 (内径 d3)/mm 37(31) 永磁铁的高度 h3/mm 2 法兰型背轭外径 D4 (内径 d4) /mm 59(29) 法兰型背轭总高度 h4/mm 10 法兰型背轭槽外径 D5 (内径 d5) /mm 51(37) 法兰型背轭槽深 h5/mm 7 磁轭总高 h6/mm 5 磁轭槽深 h7/mm 2 线圈线径/mm 0.493 线圈匝数 204 线圈截面积/mm2 49 线圈电感/mH 2.431 线圈电阻/Ω 3.252 通过有限元软件的仿真分析,线圈电流与轴向力的仿真结果如图9所示,轴向主动控制结构的具体参数如表2所示.
 图 9 线圈电流安匝数和轴向力的关系Figure 9. Relationship between coil current ampere-turns and axial force
图 9 线圈电流安匝数和轴向力的关系Figure 9. Relationship between coil current ampere-turns and axial force3. 单自由度控制型磁悬浮轴承的仿真
3.1 单自由度控制型磁悬浮轴承的仿真云图
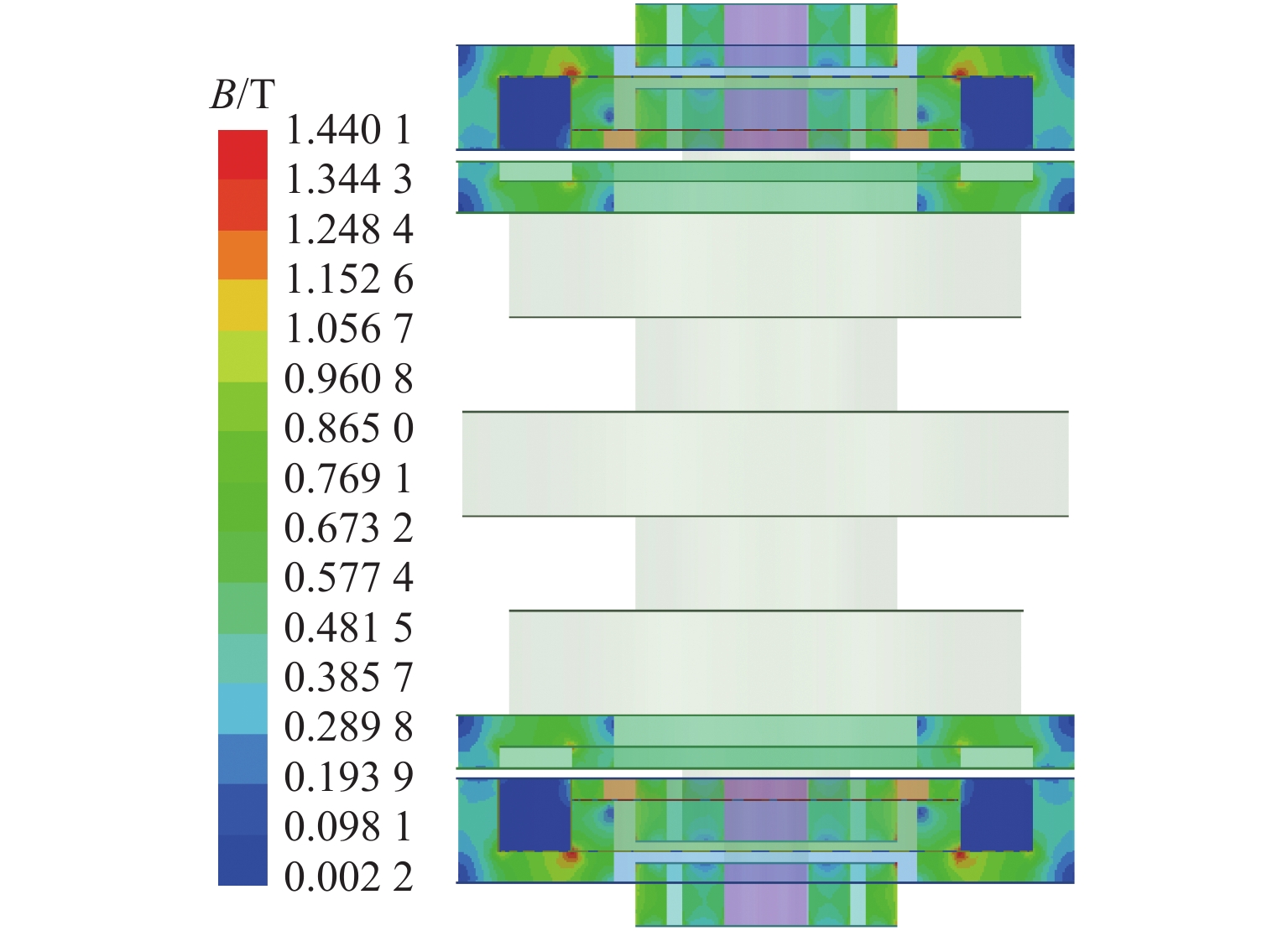
根据仿真得到径向被动控制和轴向主动控制结构参数,建立单自由度控制型磁悬浮轴承的总体仿真模型. 其中,网格大小为1 mm,网格个数为561567,边界条件为气球边界,且在室温环境下. 得到了单自由度控制型磁悬浮轴承系统整体仿真初始平衡位置线圈中电流为0的磁场强度仿真云图,如图10所示. 由图10可知,转子处于初始平衡位置时,上方的磁感应强度分布和下方的磁感应强度分布是一致的.
 图 10 初始平衡位置的磁场强度仿真云图Figure 10. Simulation cloud of magnetic field strength at initial equilibrium position
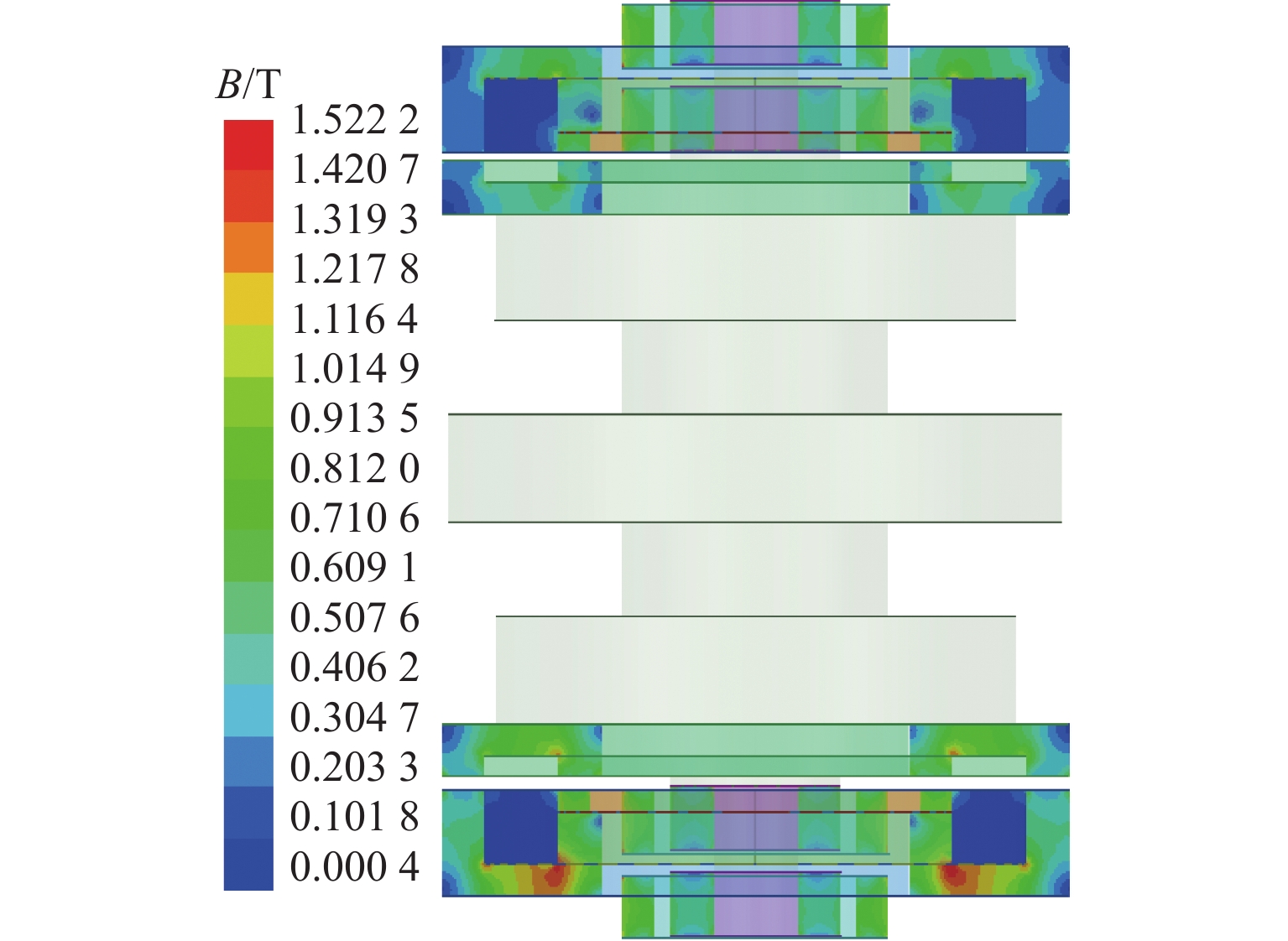
图 10 初始平衡位置的磁场强度仿真云图Figure 10. Simulation cloud of magnetic field strength at initial equilibrium position当转子Z方向向上移动0.3 mm时,通过增加下方电磁铁的电流,使得下方的磁通量增大,减小上方电磁铁的电流,使得上方的磁通量减小;上方产生的磁吸力小于下方产生的磁吸力,从而使得转子向下移动,回到初始平衡位置. 同理可得,当转子轴向向下移动0.3 mm时的控制方法. 当线圈中的安匝数为500 AT时,转子向上移动0.3 mm的磁场强度仿真如图11所示. 由图11可知:转子向上移动0.3 mm时,下方永磁铁和电磁铁叠加的磁感应强度要比上方永磁铁和电磁铁叠加的磁感应强度更强;同理可知,转子向下移动0.3 mm时,上方永磁铁和电磁铁叠加的磁感应强度要比下方永磁铁和电磁铁叠加的磁感应强度更强.
 图 11 转子向上移动0.3mm的磁场强度仿真云图Figure 11. Simulation cloud of magnetic field strength for 0.3 mm upward movement of rotor
图 11 转子向上移动0.3mm的磁场强度仿真云图Figure 11. Simulation cloud of magnetic field strength for 0.3 mm upward movement of rotor由图10、11可以看出:当转子Z方向向上移动时,与之对应的下方磁场强度大于上方磁场强度,导致下方产生的磁力大于上方产生的磁力,从而可使转子回复平衡位置;当转子Z方向向下移动时,与之对应的上方磁场强度大于下方磁场强度,导致上方产生的磁力大于下方产生的磁力,从而可使转子回复平衡位置,进而验证了差动控制方式.
3.2 单自由度控制型磁悬浮轴承的仿真验证
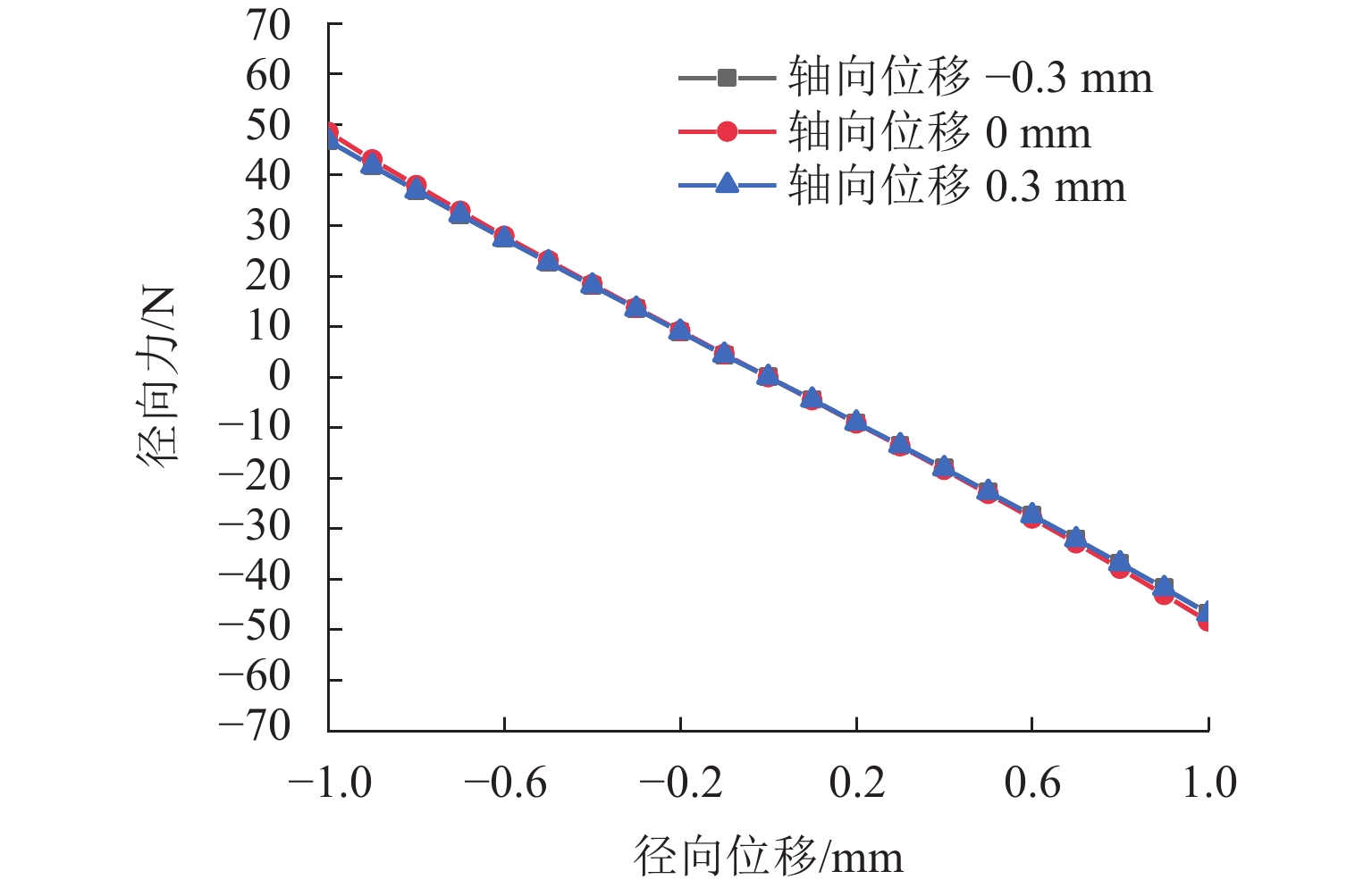
通过对单自由度控制型磁悬浮轴承系统建立有限元仿真模型,应用有限元仿真分析软件进行分析,得到不同情况下单自由度磁悬浮轴承的仿真结果. 当轴向位移不同时,转子产生的径向力随径向位移变化的曲线如图12所示. 由图12可知:转子产生的径向力随径向位移的变化而变化,并且径向力方向与径向位移方向相反,进而达到了产生恢复力的目的;转子产生的径向力大小随轴向位移的变化而不发生变化;说明转子产生的径向力只与径向位移有关,与轴向位移无关,在径向位移超过0.4 mm时,不同的轴向位移导致径向力偏差,原因是永磁铁与电磁铁之间发生干涉,使得一部分磁通量流入电磁铁的磁轭中;在工况边界条件下,径向方向产生的最大恢复力可达50 N,径向位移刚度系数为47.432 N/mm.
 图 12 径向位移和径向力的关系Figure 12. Relationships between radial displacement and radial force
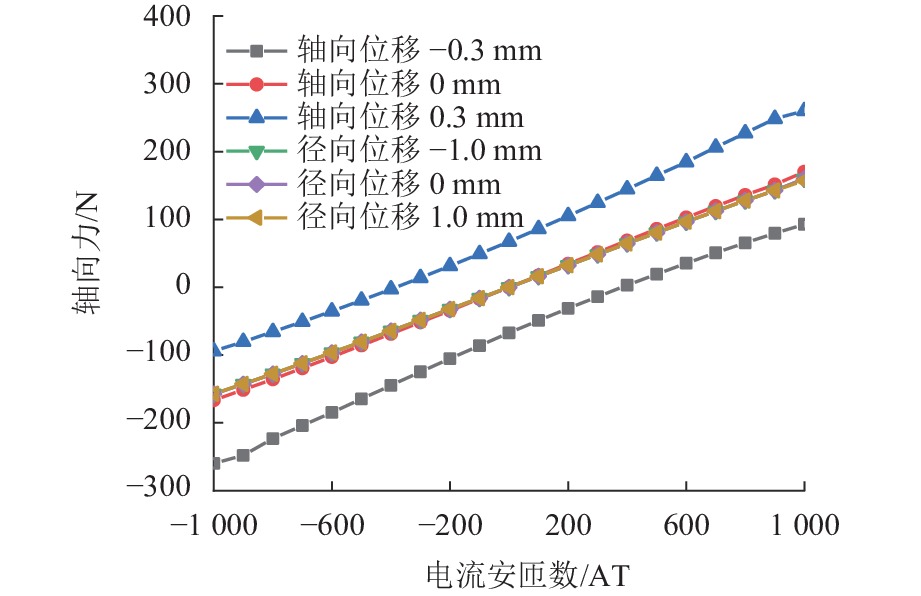
图 12 径向位移和径向力的关系Figure 12. Relationships between radial displacement and radial force当转子的径向位移和轴向位移不同时,转子产生的轴向力随电流安匝数变化曲线如图13所示. 由图13可知:转子产生的轴向力随电流安匝数的变化而变化,也随轴向位移的变化而变化;随着径向位移的变化,轴向力的大小几乎没有变化. 说明径向位移对轴向力没有影响,轴向力与电流安匝数的多少和轴向位移有关. 虽然不同的径向位移导致轴向力的偏差,但原因是永磁铁与电磁铁之间发生干涉,使得一部分磁通量流入电磁铁的磁轭中. 其中,通过仿真可知:在工况边界条件下,轴向方向产生的最大轴向力可达80 N,轴向电流刚度系数为0.144 N/AT;并且当安匝数为400 AT时,该磁悬浮轴承可以使转子起浮.
 图 13 线圈电流安匝数和轴向力的关系Figure 13. Relationships between coil current ampere-turns and axial force
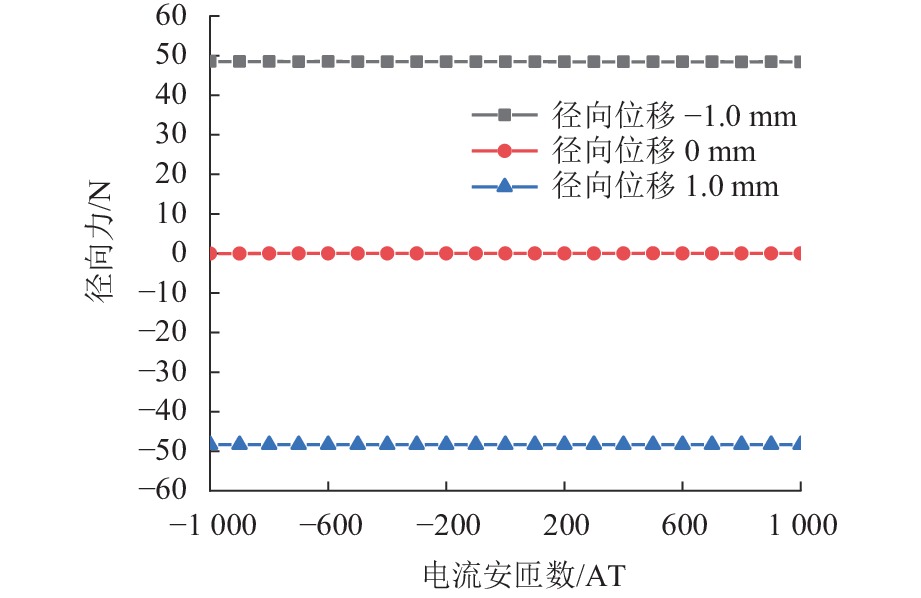
图 13 线圈电流安匝数和轴向力的关系Figure 13. Relationships between coil current ampere-turns and axial force当径向位移不同时,转子产生的径向力随电流安匝数变化曲线如图14所示. 由图可知:转子产生的径向力随径向位移的变化而变化,但无论电流的安匝数如何变化,转子产生的径向力都没有发生变化,说明转子产生的径向力与电流的安匝数无关,只与径向位移有关.
 图 14 线圈电流安匝数和径向力的关系Figure 14. Relationships between coil current ampere-turns and radial force
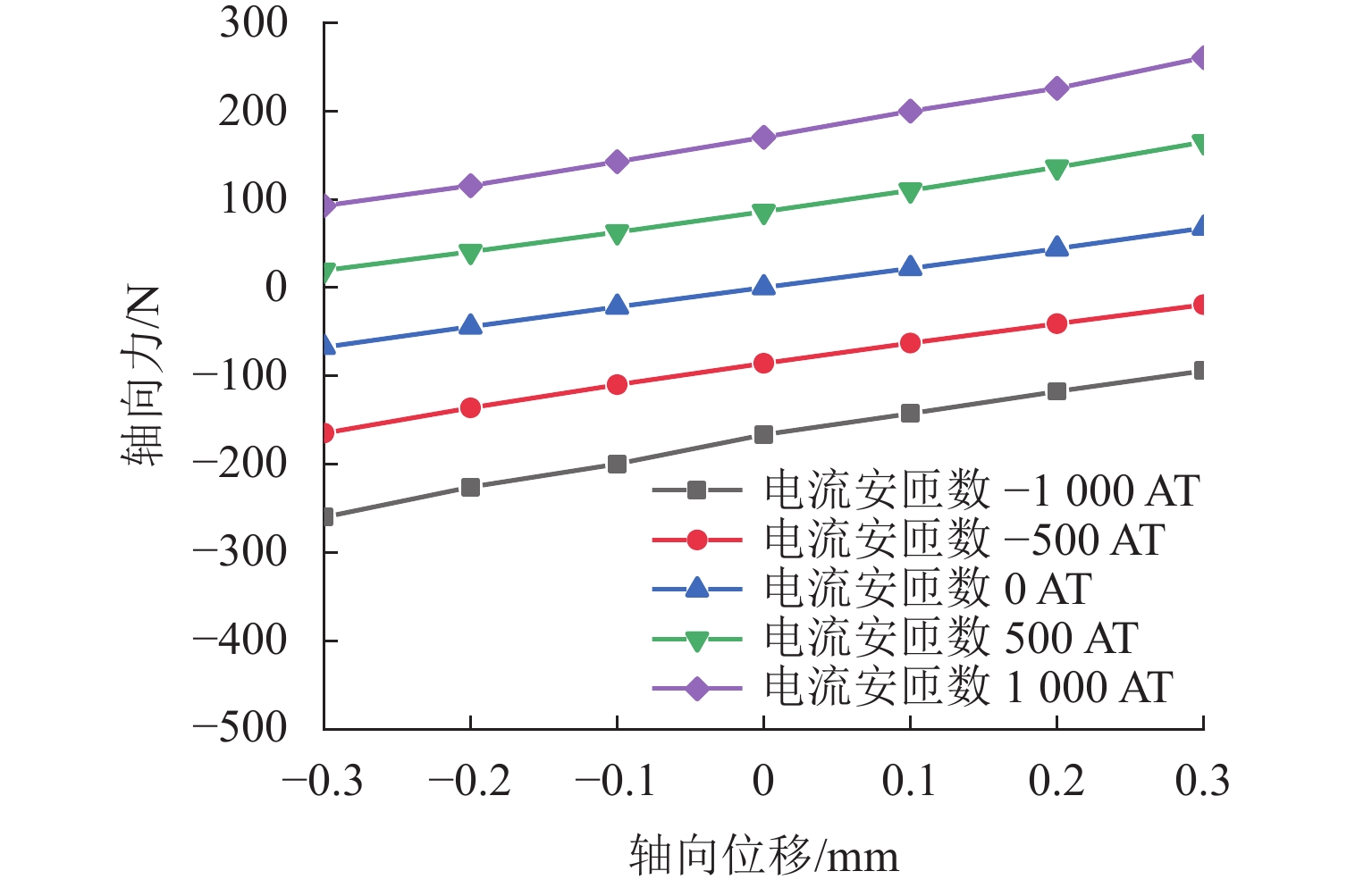
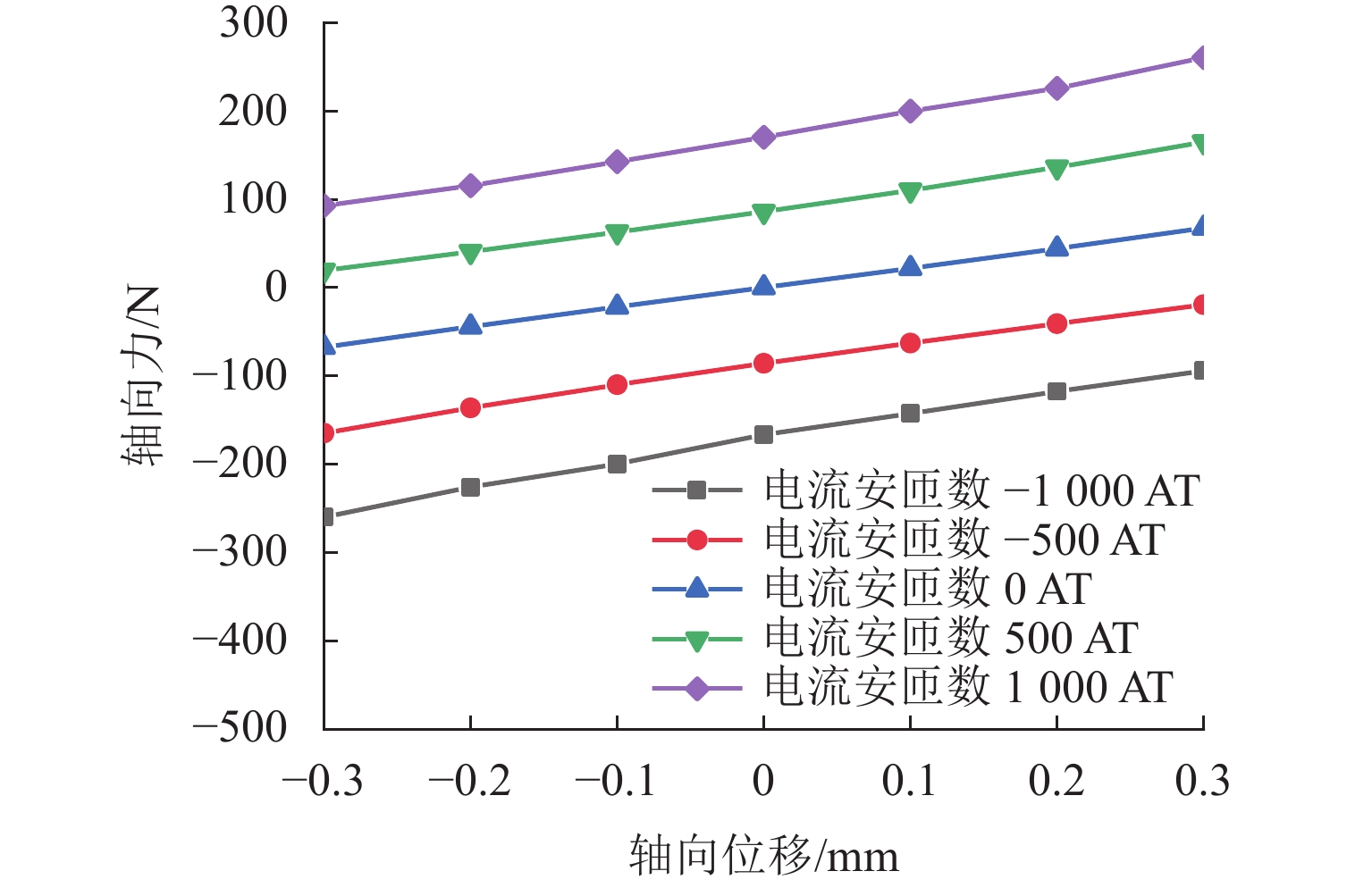
图 14 线圈电流安匝数和径向力的关系Figure 14. Relationships between coil current ampere-turns and radial force当电流的安匝数不同时,转子产生的轴向力随轴向位移变化的曲线如图15所示. 由图可知:转子产生的轴向力随轴向位移的变化而变化,并且转子产生的轴向力与轴向位移是正相关关系;转子产生的轴向力随电流安匝数的变化而变化. 说明转子产生的轴向力与电流的安匝数有关,也与转子的轴向的位移有关. 其中,通过仿真可知,在工况边界条件下,轴向位移刚度系数为223.071 N/mm.
根据上述4个仿真曲线可以看出:转子产生的径向力与转子的轴向位移和线圈电流无关,转子的径向力与转子的径向位移有关;转子的轴向力与转子的径向位移无关,转子的轴向力与转子的轴向位移和线圈电流有关,证明了轴向和径向没有耦合. 根据图12可知:径向力的方向与径向位移方向相反;轴向位移对径向力的大小没有影响. 根据图15可知:当线圈的安匝数为500 AT时,就可以很好实现主动控制所需要的力.
综上所述,磁悬浮轴承系统径向被动控制和轴向主动控制没有关联.
4. 原理样机的验证
4.1 原理样机
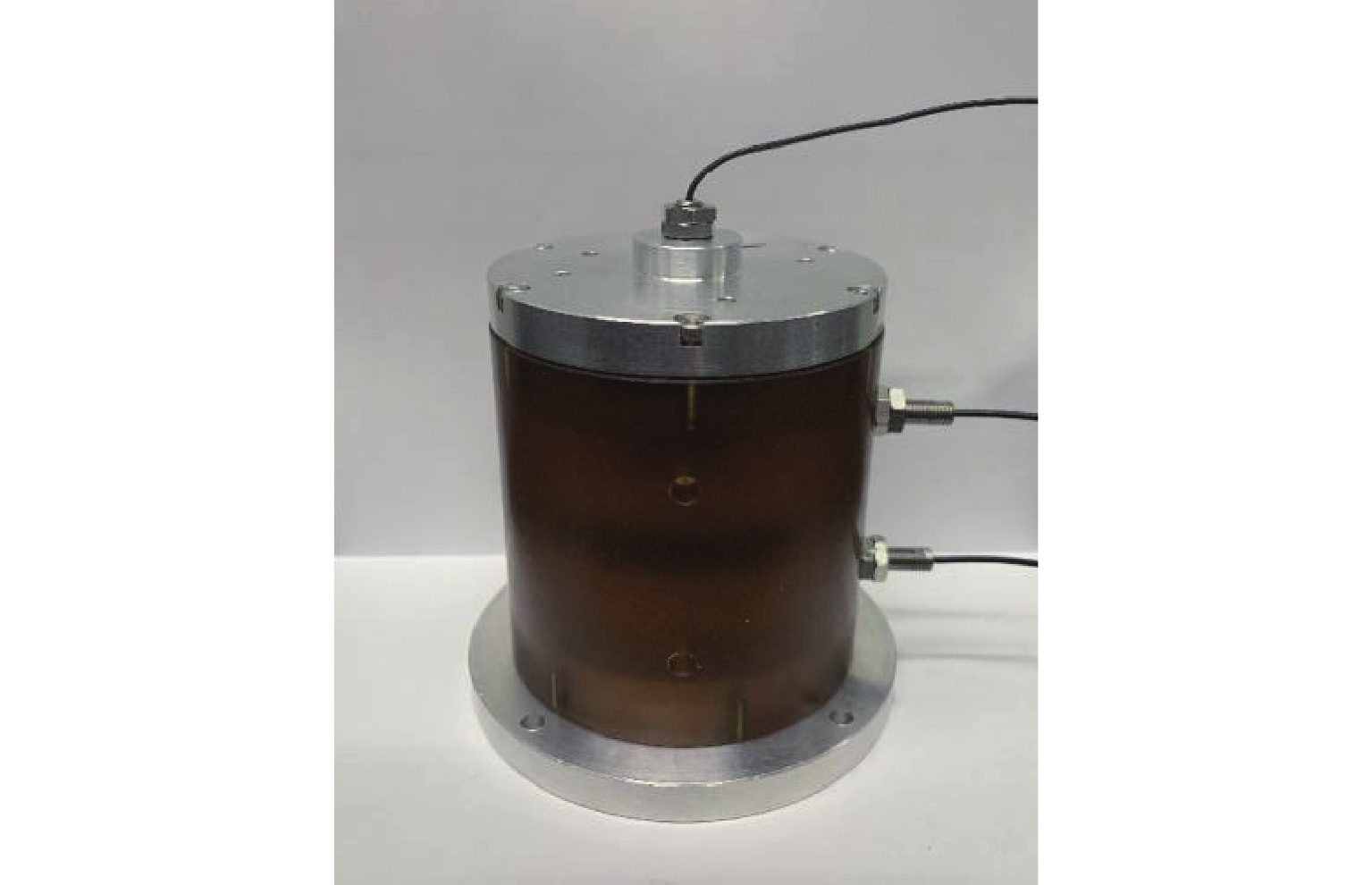
试制的磁悬浮轴承实物如图16所示,其中:定子由永磁体、线圈、法兰型背轭、上下端盖以及壳体组成;转子由永磁体、磁轭和带齿的转子组成;法兰型背轭和磁轭的材料是工业纯铁,上下端盖和带齿的转子的材料是铝合金,壳体是树脂材料.
在加工过程中,永磁铁与上下端盖、永磁铁与带齿转子的连接是以铝合金的芯为基准压入且用胶粘合. 下端盖采用螺纹连接与实验平台相连.
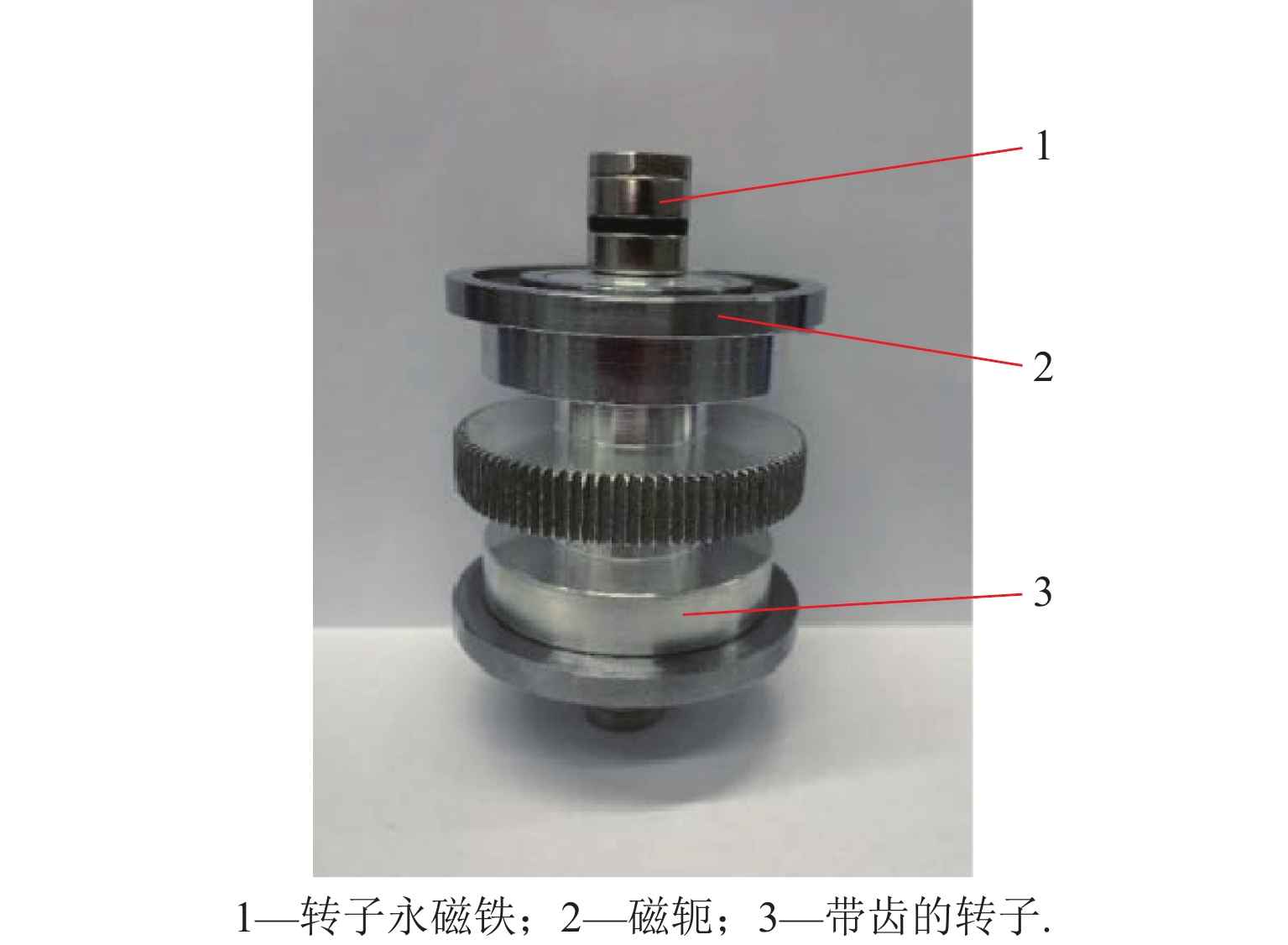
单自由度控制型磁悬浮轴承的转子如图17所示,其中,转子的中间是齿数为90的正齿轮,且齿轮高度与压缩空气的喷射口平齐,以便于压缩空气刚好吹动带齿的转子. 转子中间的齿轮作为空气涡轮,为转子提供旋转扭矩,并且还作为编码器,便于计算转子的转速.
 图 17 单自由度磁悬浮轴承的转子Figure 17. Rotor for single-degree-of-freedom magnetic levitation bearing
图 17 单自由度磁悬浮轴承的转子Figure 17. Rotor for single-degree-of-freedom magnetic levitation bearing试制磁悬浮轴承的尺寸直径为80 mm,高105 mm,质量1.221 kg,其中,转子的最大直径为59 mm,质量为0.361 kg. 为实现转子的轴向控制和径向及倾斜方向的性能评价,给整个磁悬浮轴承系统配置了5个电涡流位移传感器.
4.2 电流刚度系数实验验证
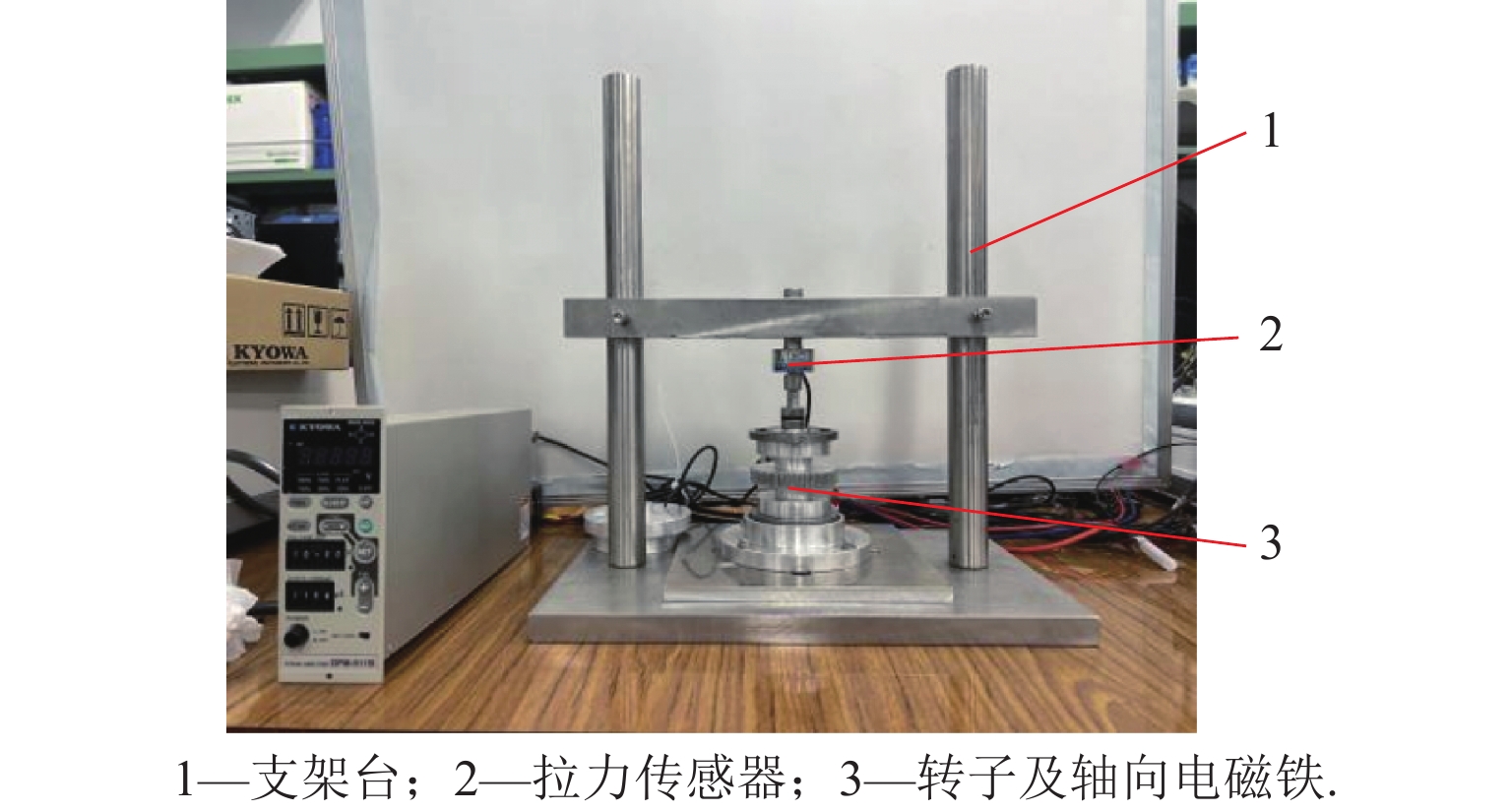
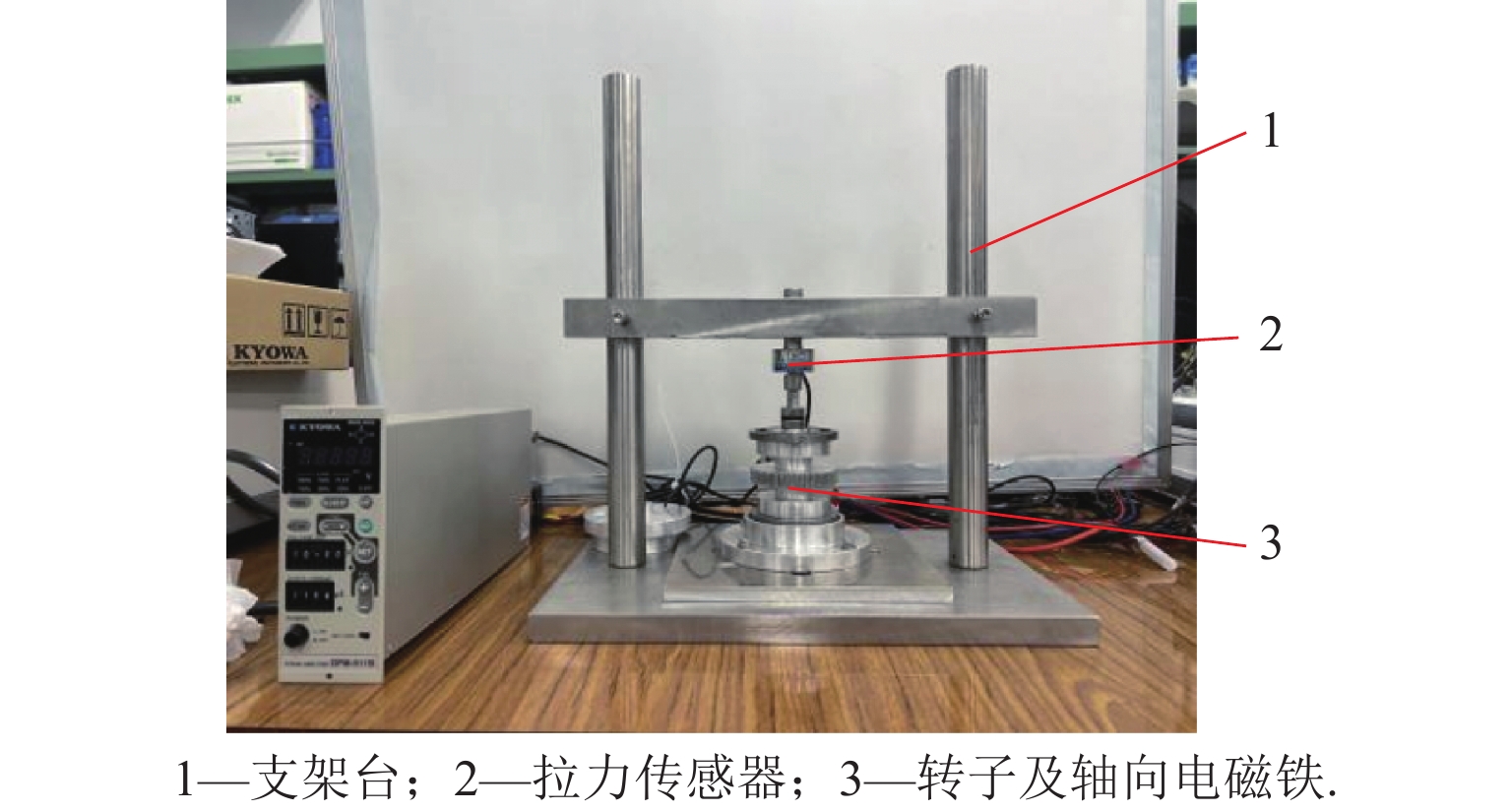
单自由度控制型磁悬浮轴承的实验装置如图18所示.
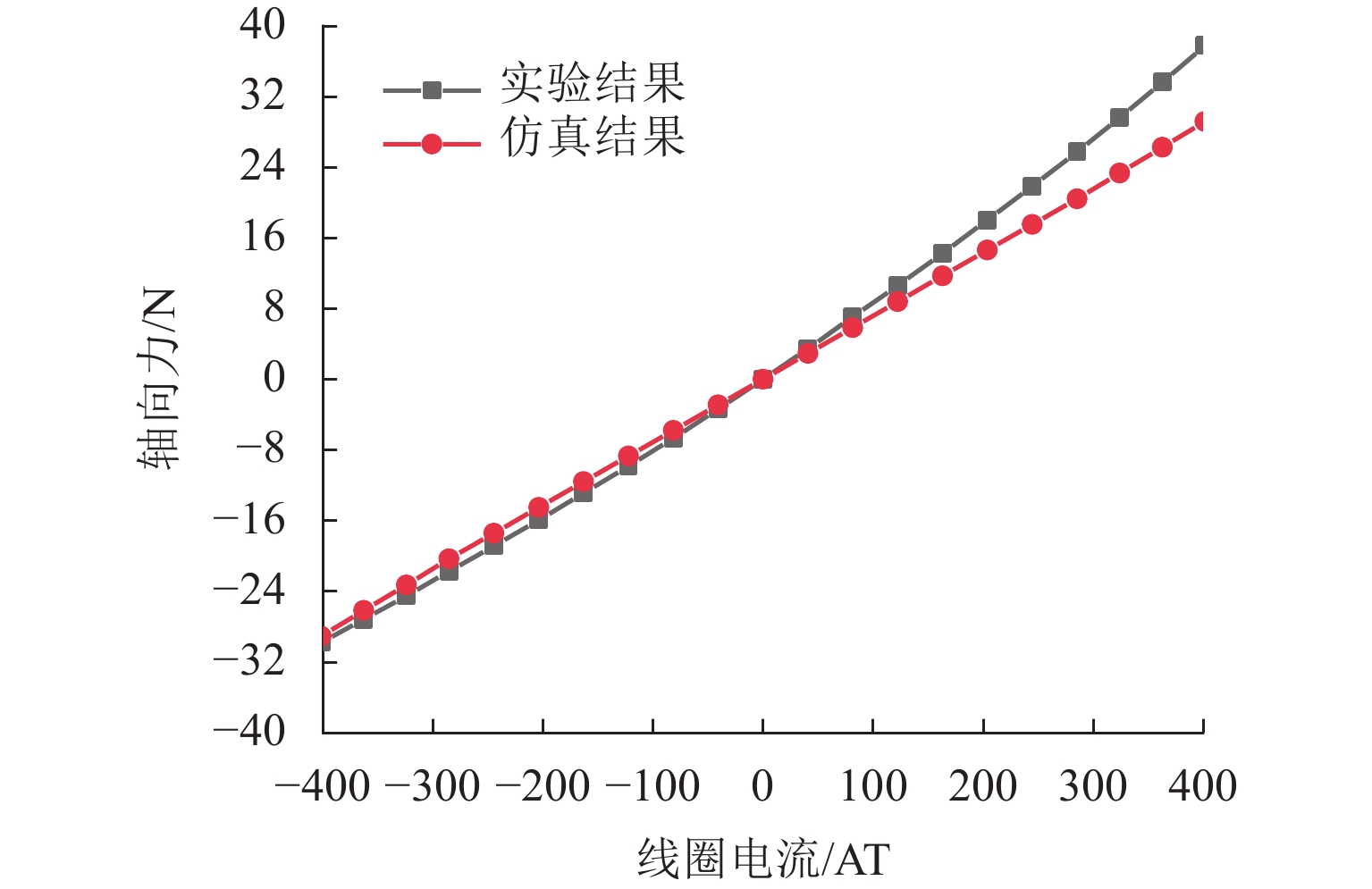
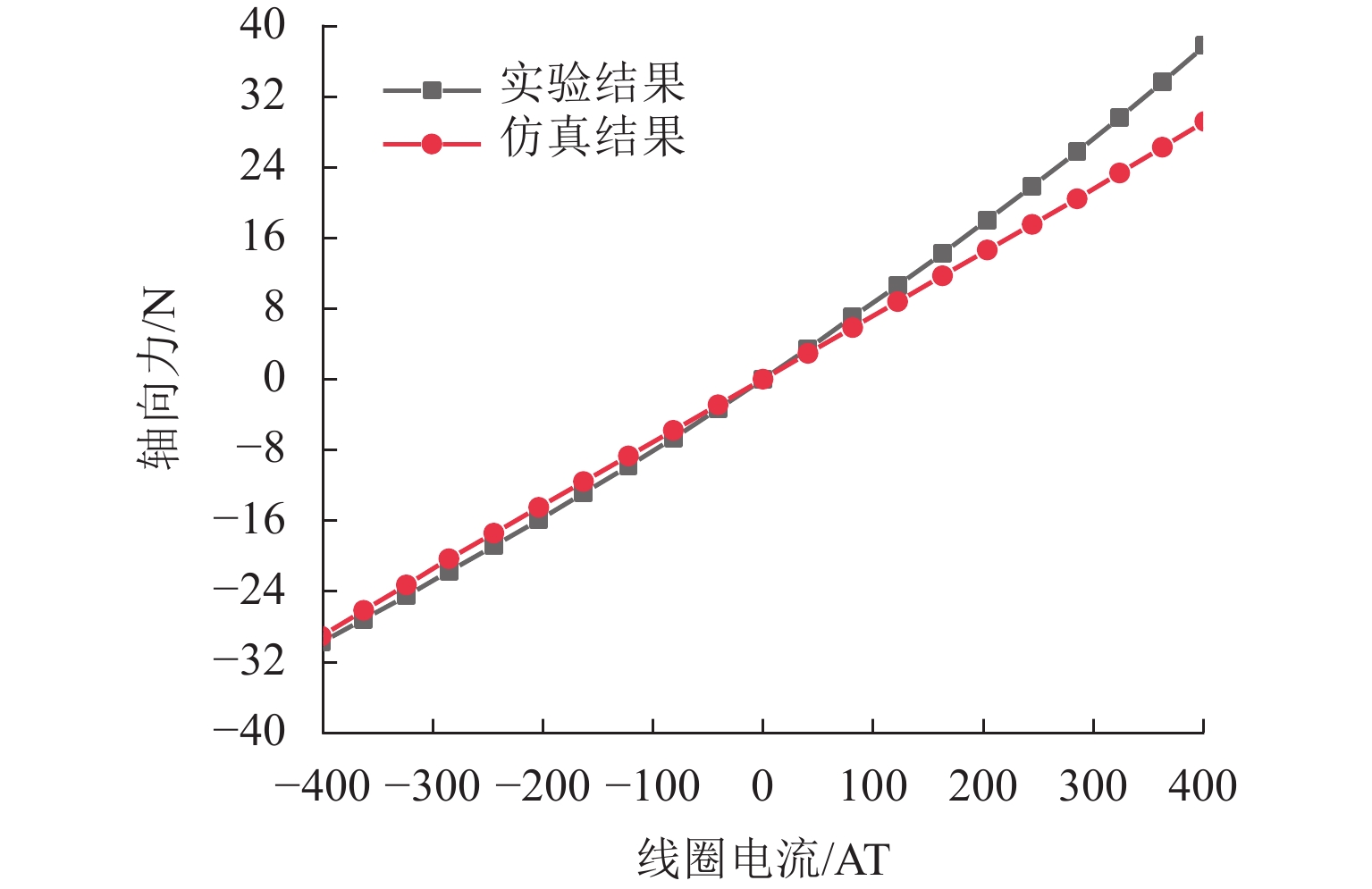
针对仿真得到的电流刚度系数,根据搭建好的实验台,对轴向电流刚度系数进行实验验证. 一共做了3组电流刚度实验,统计每组得到的数据,求取平均值,绘制电流安匝数与轴向电磁力之间关系的曲线,求取实验得到的电流刚度系数,如图19所示.
由图19可知:本文测得的轴向力是实际装置的一半,并且整个装置是对称的,所以测得的轴向力是图19所得结果的2倍,且在线圈电流为−400~400 AT时,实验对应得到的轴向力为−60~80 N,符合轴向控制力的要求. 由拟合得到的曲线可得,实验得到的电流刚度系数为0.135 N/AT,而仿真得到的电流刚度系数为0.144 N/AT,误差为6%,证明了该磁悬浮轴承系统比较精确.
4.3 径向位移刚度系数实验验证
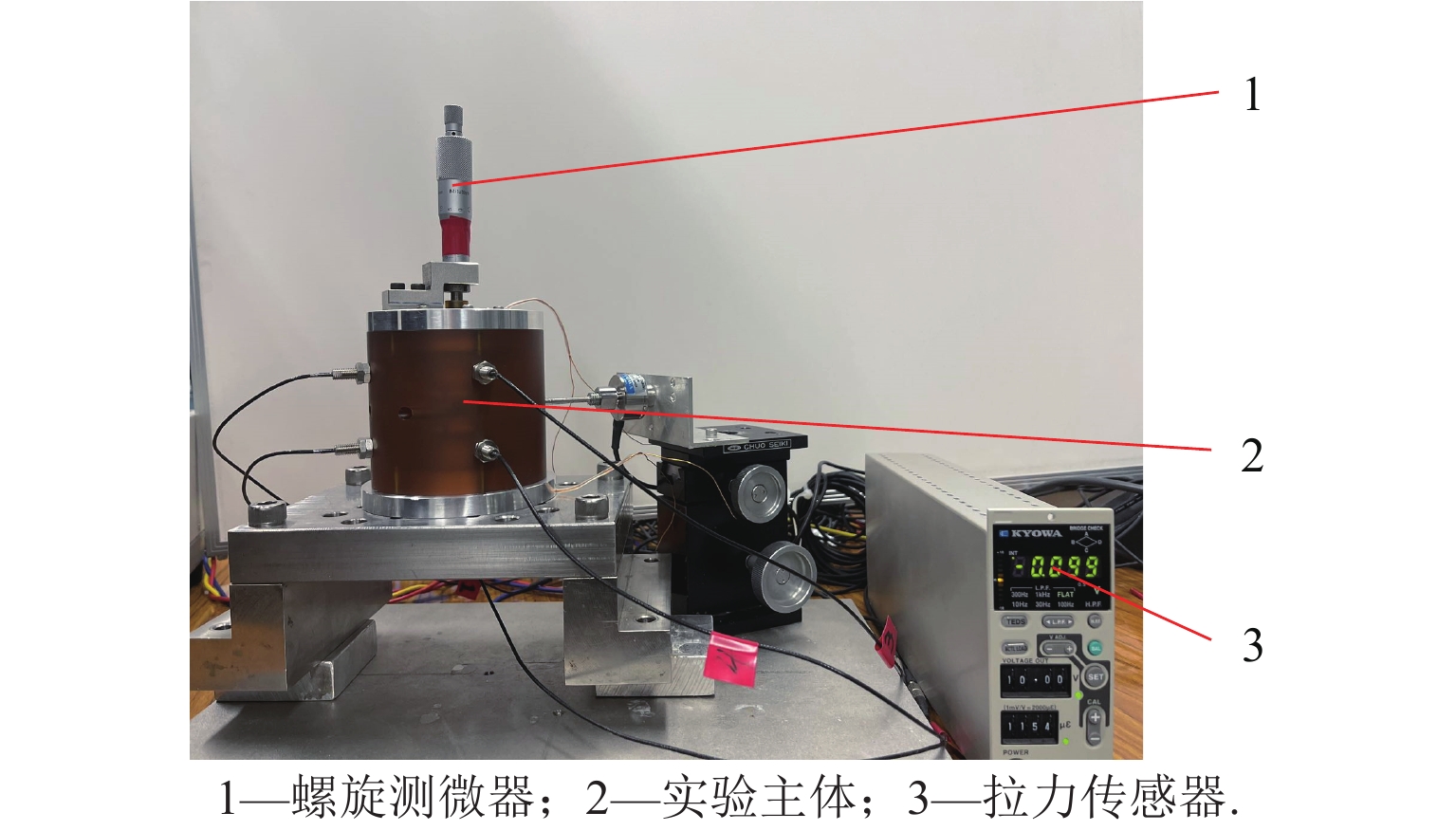
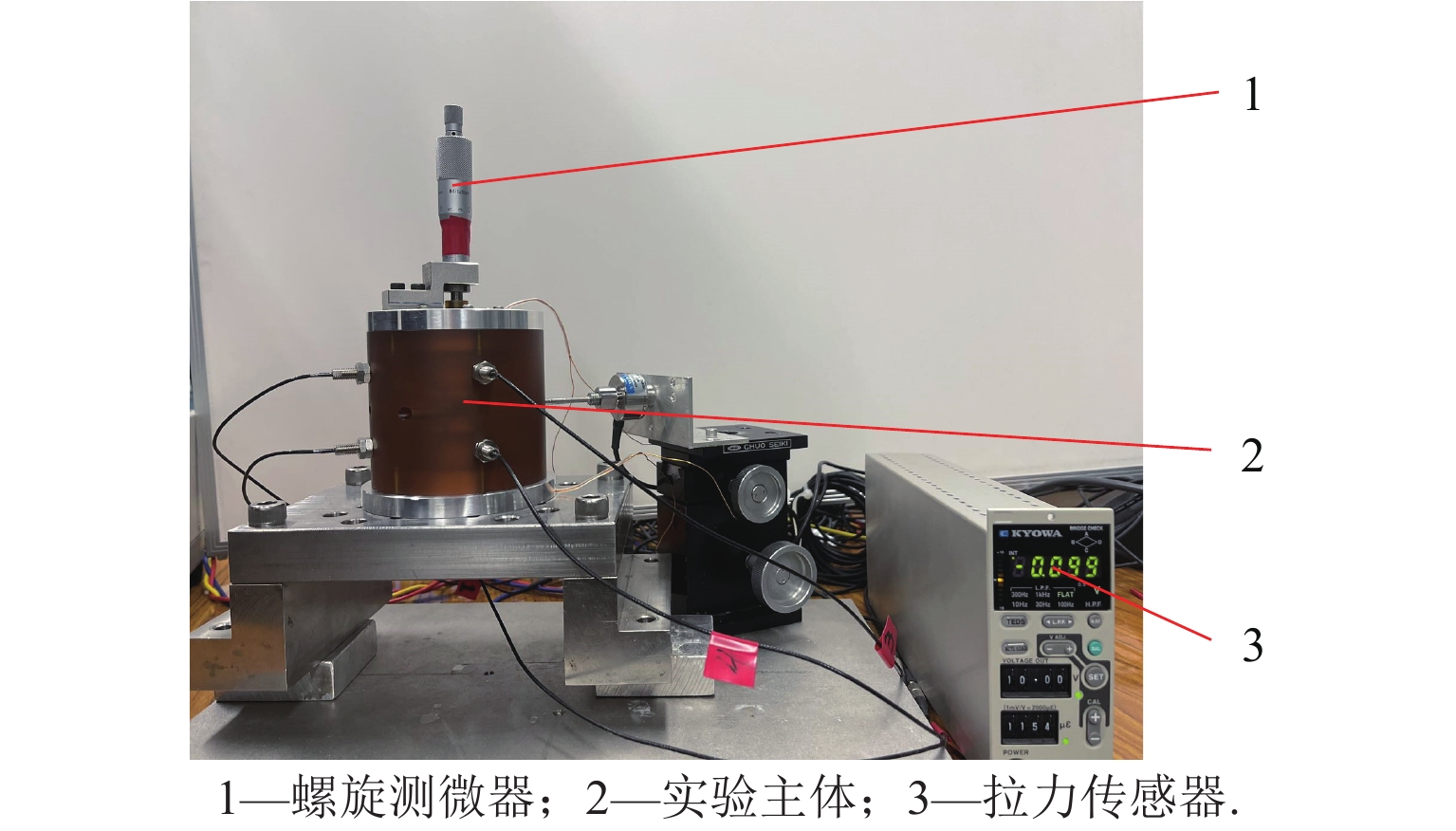
单自由度控制型磁悬浮轴承的径向位移刚度实验装置如图20所示.
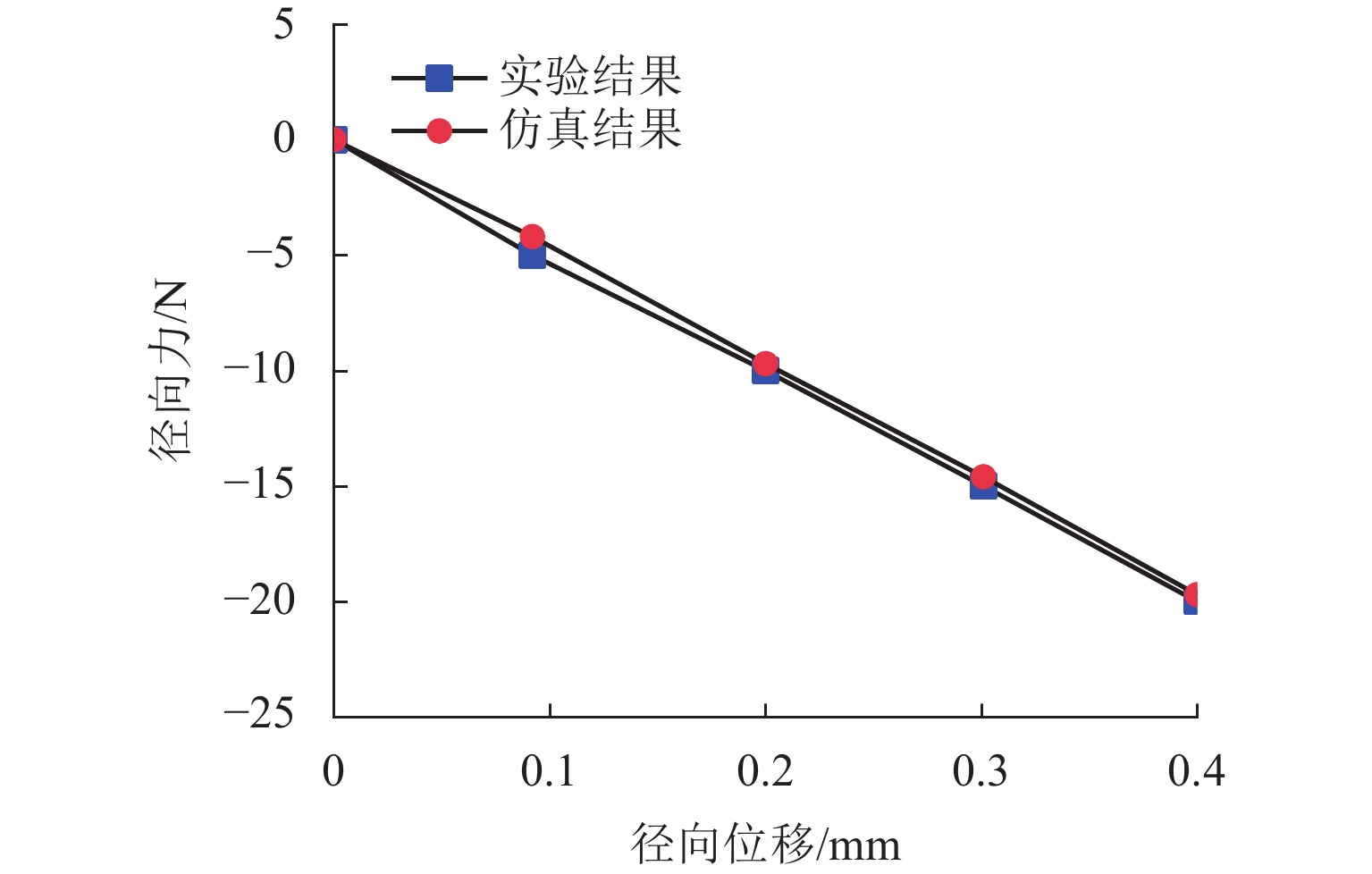
针对仿真得到的径向位移刚度系数,根据搭建好的实验台,对径向位移刚度系数进行实验验证. 根据得到的实验结果,绘制径向位移与径向力之间关系的曲线,并与仿真结果进行对比,如图21所示.
 图 21 径向位移和径向力的关系Figure 21. Relationships between radial displacement and radial force
图 21 径向位移和径向力的关系Figure 21. Relationships between radial displacement and radial force由拟合得到的曲线可得,实验得到的径向位移刚度系数为49.531 N/mm,而仿真得到的径向位移刚度系数为47.432 N/mm,误差为4%,该磁悬浮轴承系统比较精确.
5. 结 论
针对传统人工肾脏泵中采用的滚动轴承的溶血高、耐性差等问题,本文提出了一种节能、紧凑的单自由度磁悬浮轴承.
1) 提出了一种作为人工肾脏泵转子支撑机构的磁力支撑装置,采用有限元软件仿真的方式对磁力支撑装置中的径向磁悬浮轴承和轴向磁悬浮轴承进行结构设计. 结果表明,该磁悬浮轴承支撑人工肾脏的叶轮是可行的.
2) 通过对该磁悬浮轴承的支撑性能进行评价,相比于传统滚动轴承支撑的人工肾脏泵,采用磁悬浮轴承进行支撑的性能更加优越.
3) 通过仿真和实验进行验证,有限元仿真分析可得该磁悬浮轴承的径向恢复力为50 N,轴向控制力为80 N,且在工况条件下,径向位移刚度系数为47.432 N/mm,轴向位移刚度系数为223.07 N/m,轴向电流刚度系数为0.144 N/AT. 实验检测得到的径向位移刚度系数为49.531 N/mm,轴向电流刚度系数为0.135 N/AT.
-
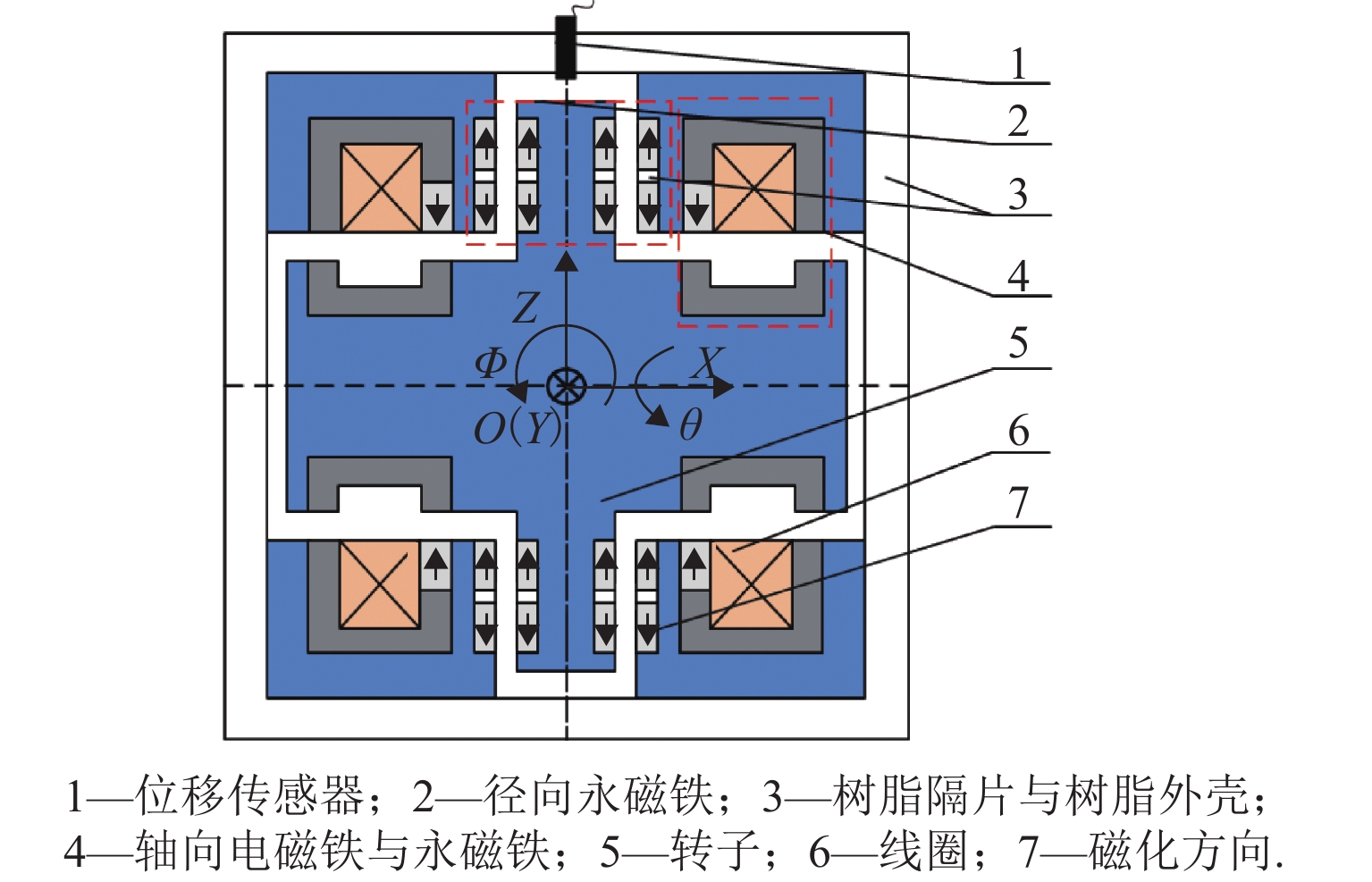
图 2 单自由度控制型磁悬浮轴承
Figure 2. Single-degree-of-freedom controlled magnetic levitation bearing
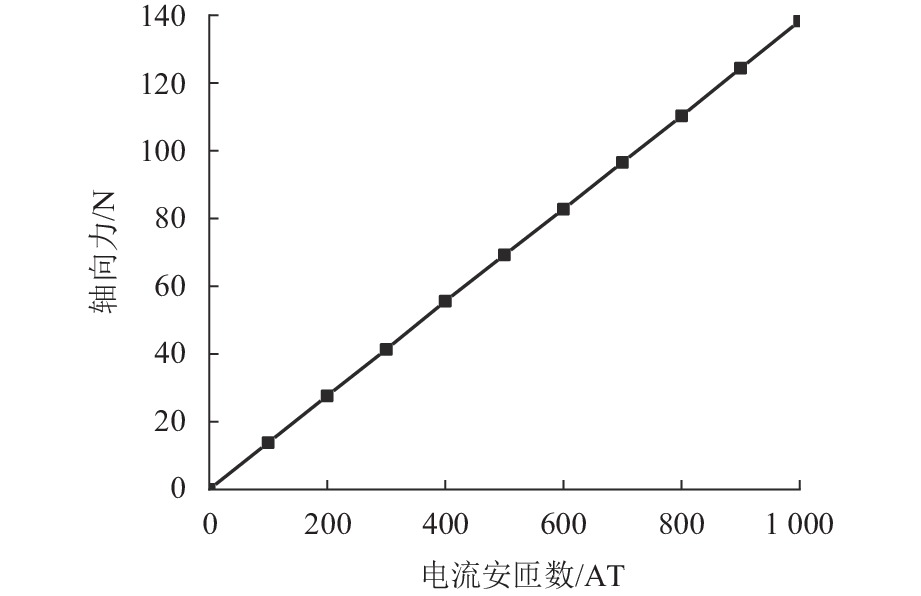
图 9 线圈电流安匝数和轴向力的关系
Figure 9. Relationship between coil current ampere-turns and axial force
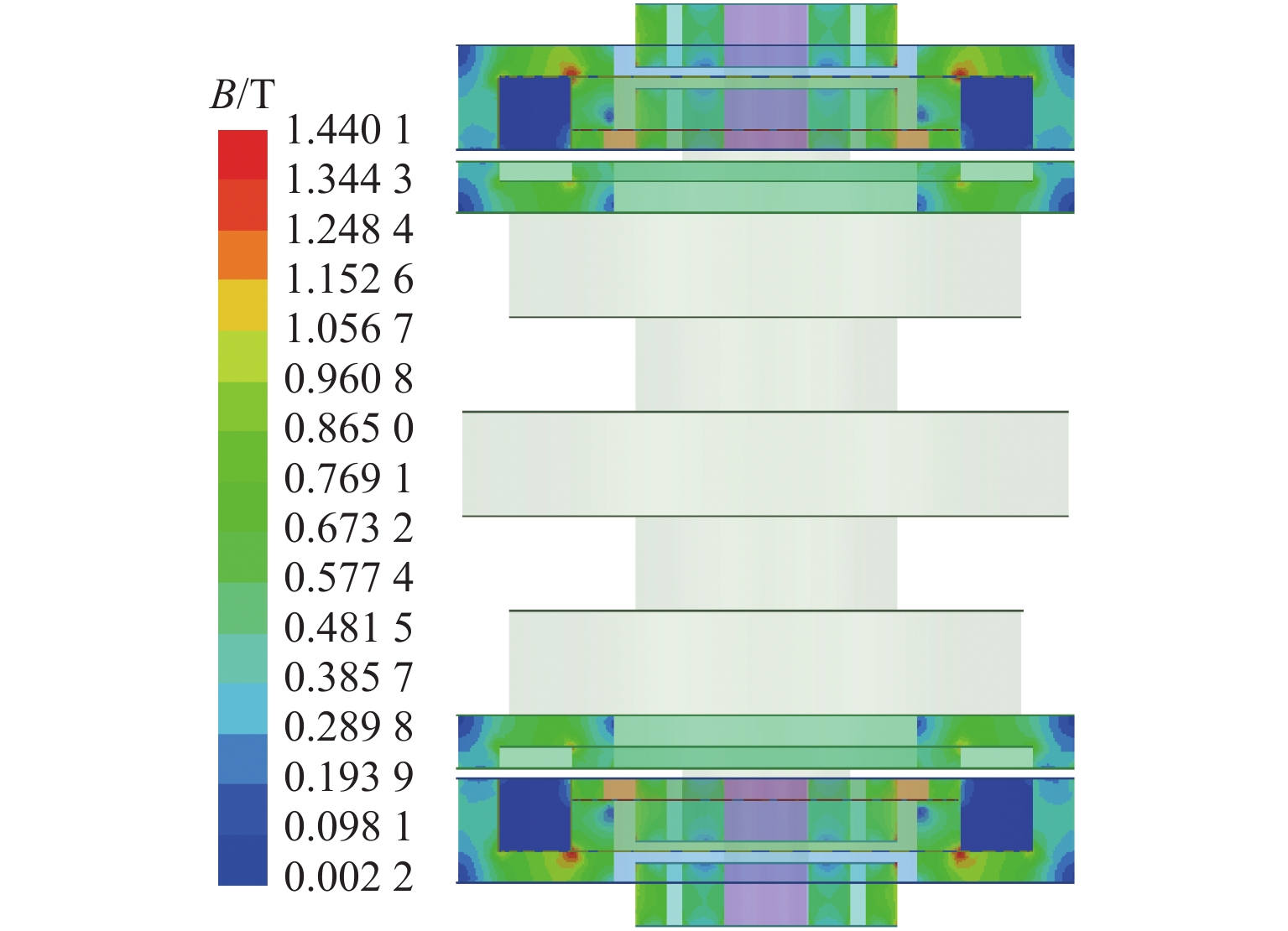
图 10 初始平衡位置的磁场强度仿真云图
Figure 10. Simulation cloud of magnetic field strength at initial equilibrium position
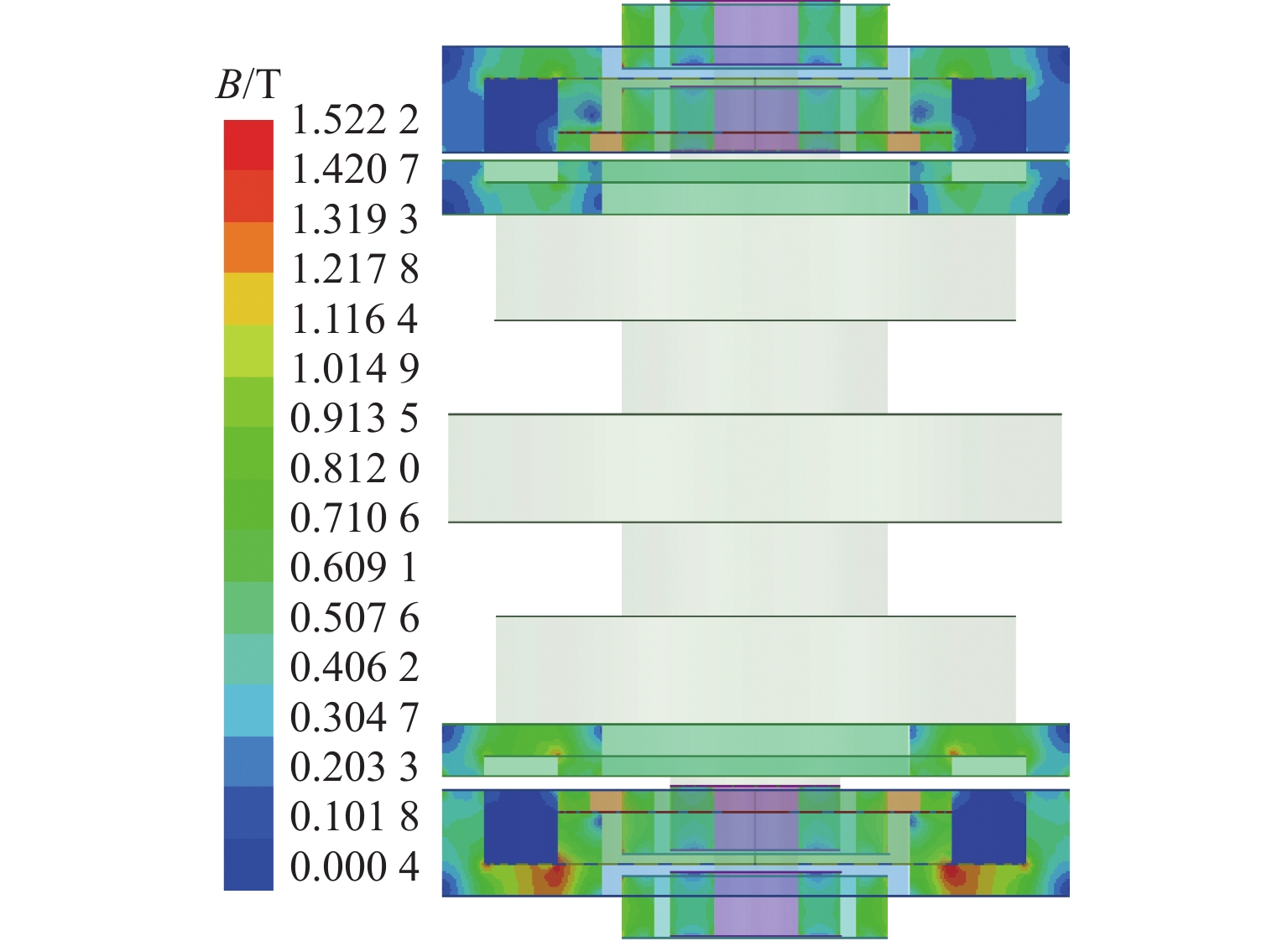
图 11 转子向上移动0.3mm的磁场强度仿真云图
Figure 11. Simulation cloud of magnetic field strength for 0.3 mm upward movement of rotor
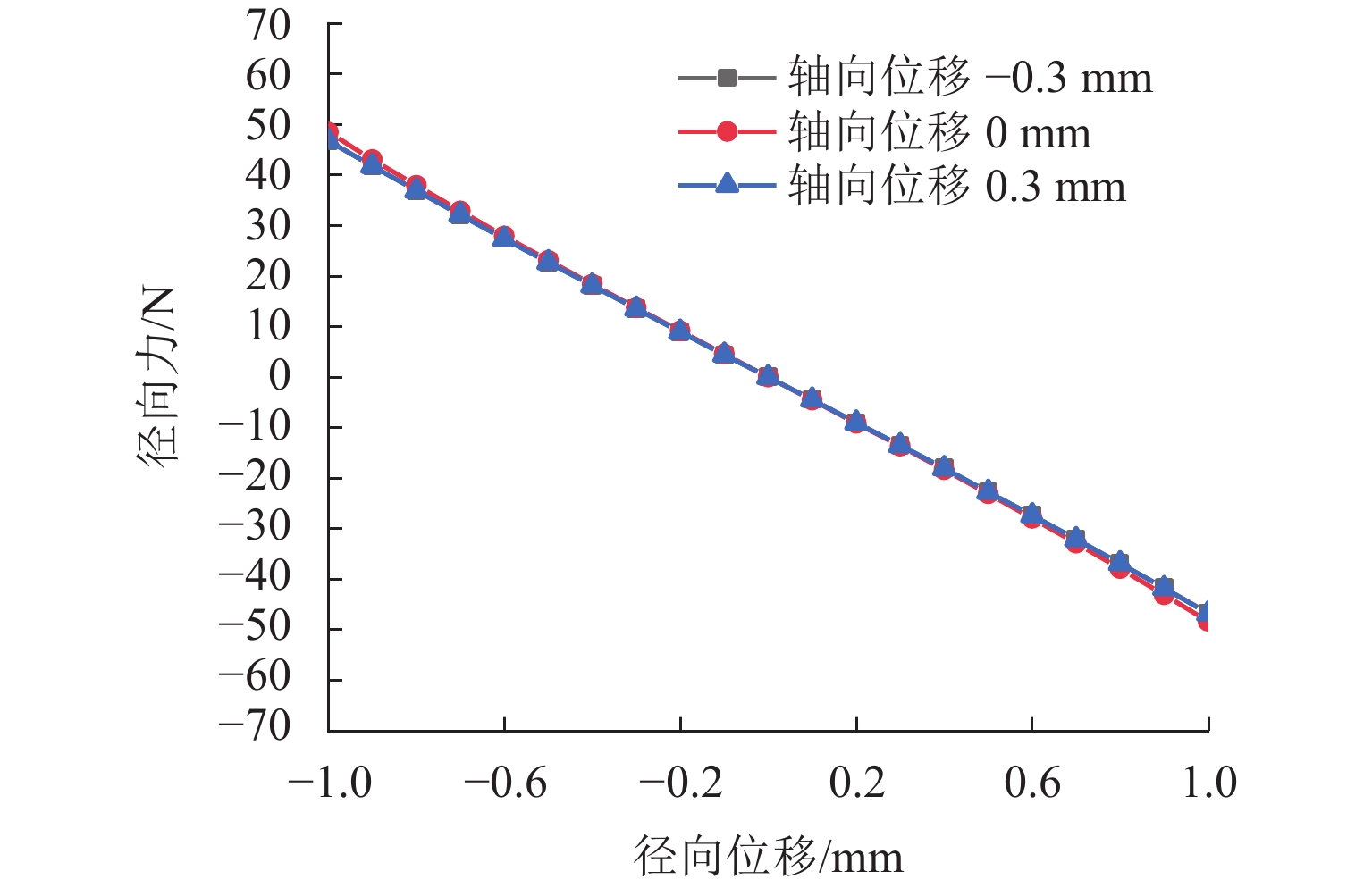
图 12 径向位移和径向力的关系
Figure 12. Relationships between radial displacement and radial force
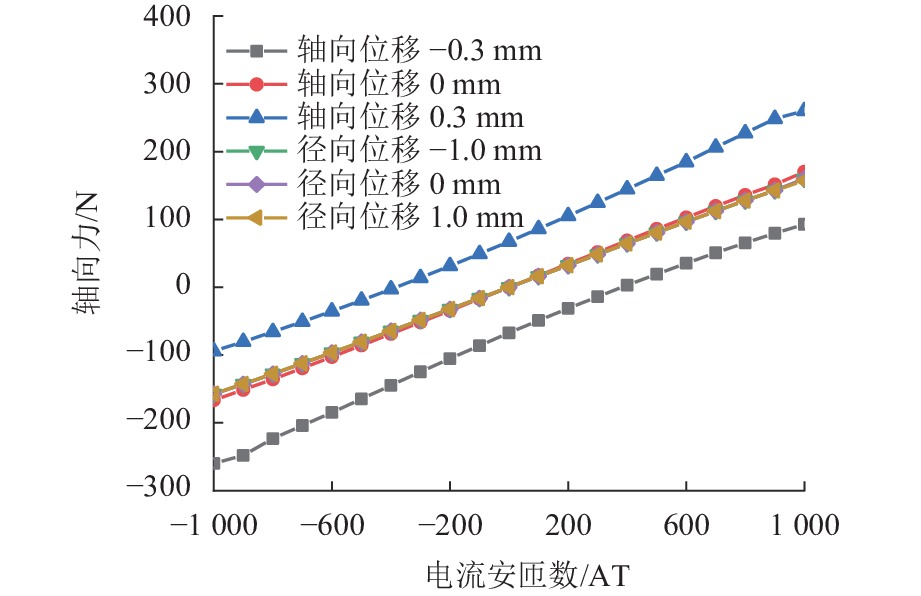
图 13 线圈电流安匝数和轴向力的关系
Figure 13. Relationships between coil current ampere-turns and axial force
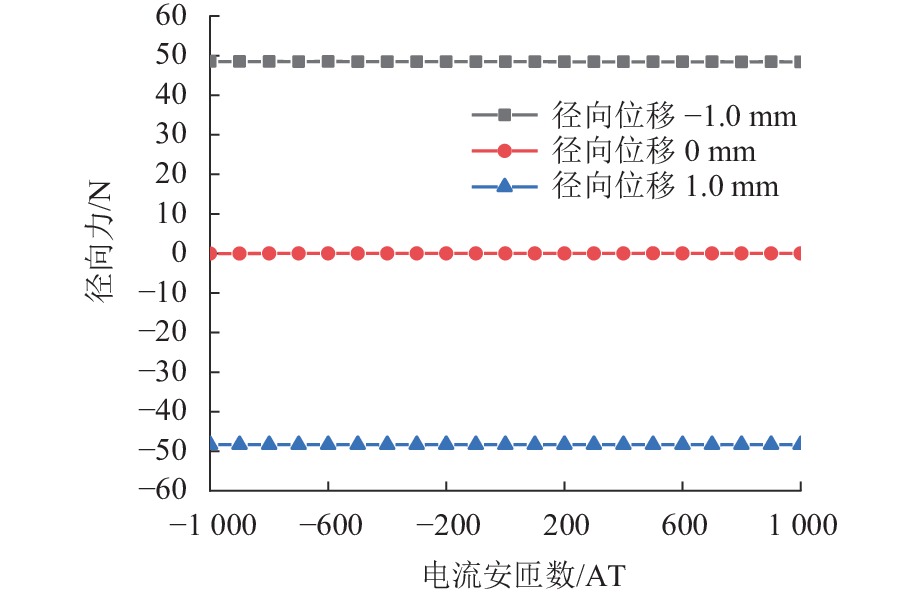
图 14 线圈电流安匝数和径向力的关系
Figure 14. Relationships between coil current ampere-turns and radial force

图 17 单自由度磁悬浮轴承的转子
Figure 17. Rotor for single-degree-of-freedom magnetic levitation bearing
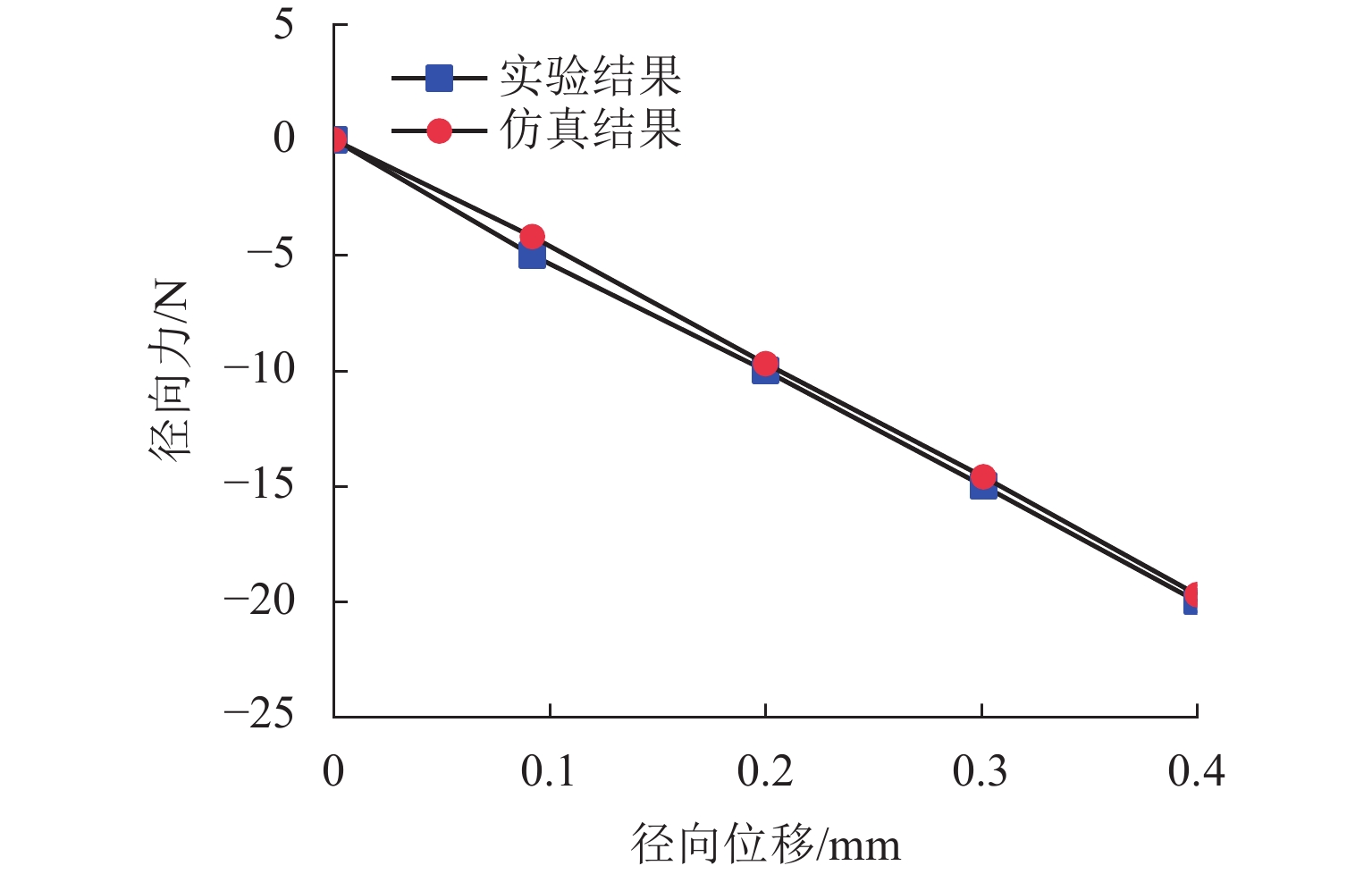
图 21 径向位移和径向力的关系
Figure 21. Relationships between radial displacement and radial force
表 1 径向永磁铁参数
Table 1. Radial permanent magnet parameters
参数 数值 定子永磁铁外径 D1/mm 25 定子永磁铁内径 d1/mm 19 定子永磁铁高度 h1/mm 6 动子永磁铁外径 D2/mm 16 动子永磁铁内径 d2/mm 8 动子永磁铁高度 h2/mm 6 两永磁铁的轴向间隙 H/mm 2 永磁铁间距/mm 1.5 永磁铁材料 钕铁硼 N52  下载: 导出CSV
下载: 导出CSV
表 2 轴向主动控制结构参数
Table 2. Structural parameters of axial active control
参数 数值 永磁铁材料 钕铁硼 N33 永磁铁外径 D3 (内径 d3)/mm 37(31) 永磁铁的高度 h3/mm 2 法兰型背轭外径 D4 (内径 d4) /mm 59(29) 法兰型背轭总高度 h4/mm 10 法兰型背轭槽外径 D5 (内径 d5) /mm 51(37) 法兰型背轭槽深 h5/mm 7 磁轭总高 h6/mm 5 磁轭槽深 h7/mm 2 线圈线径/mm 0.493 线圈匝数 204 线圈截面积/mm2 49 线圈电感/mH 2.431 线圈电阻/Ω 3.252
下载: 导出CSV
-
[1] BIKBOV B, PURCELL C A, LEVEY A S, et al. Global, regional, and national burden of chronic kidney disease, 1990 —2017: a systematic analysis for the Global Burden of Disease Study 2017[J]. The Lancet, 2020, 395(10225): 709-733. doi: 10.1016/S0140-6736(20)30045-3 [2] MOLLAHOSSEINI A, ABDELRASOUL A, SHOKER A. A critical review of recent advances in hemodialysis membranes hemocompatibility and guidelines for future development[J]. Materials Chemistry and Physics, 2020, 248: 122911.1-122911. 29. [3] ZHILO N M, LITINSKAIA E L, BAZAEV N A. Control system for glucose level regulation in peritoneal dialysis[J]. Journal of Physics: Conference Series, 2021, 2091(1): 012019.1-012019.19. [4] ZHILO N M, BAZAEV N A. Control of wearable artificial kidney[C]//2019 Ⅲ International Conference on Control in Technical Systems (CTS). Petersburg: IEEE, 2020: 31-34. [5] PARSONS A D, SANSCRAINTE C, LEONE A, et al. Dialysis disequilibrium syndrome and intracranial pressure fluctuations in neurosurgical patients undergoing renal replacement therapy: systematic review and pooled analysis[J]. World Neurosurgery, 2022,170: 2-6. [6] FLEMING G M. Renal replacement therapy review: past, present and future[J]. Organogenesis, 2011, 7(1): 2-12. doi: 10.4161/org.7.1.13997 [7] VAN GELDER M K, JONG J A W, FOLKERTSMA L, et al. Urea removal strategies for dialysate regeneration in a wearable artificial kidney[J]. Biomaterials, 2020, 234: 119735. 1-119735.18 [8] GURA V, RIVARA M B, BIEBER S, et al. A wearable artificial kidney for patients with end-stage renal disease[J]. JCI Insight, 2016, 1(8): e86397.1-e86397.15 [9] ARIYOSHI K, ISOYAMA T, HARA S, et al. Basic study of a centrifugal separator for the implantable centrifugal artificial kidney[J]. Transactions of Japanese Society for Medical and Biological Engineering, 2017, 55: 459-459. [10] MASUZAWA T. Magnetically suspended blood pump[J]. Journal of the Japan Society of Applied Electromagnetics and Mechanics, 2017, 25(3): 325-331. doi: 10.14243/jsaem.25.325 [11] 胡余生,李立毅,郭伟林,等. 基于不等磁路面积设计方法的磁轴承刚度[J]. 西南交通大学学报,2022,57(3):648-656.HU Yusheng, LI Liyi, GUO Weilin, et al. Support stiffness of magnetic bearing based on unequal magnetic circuit area design method[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 648-656. [12] 周扬,周瑾,张越,等. 基于RBF近似模型的磁悬浮轴承结构优化设计[J]. 西南交通大学学报,2022,57(3):682-692.ZHOU Yang, ZHOU Jin, ZHANG Yue, et al. Optimum structural design of active magnetic bearing based on RBF approximation model[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 682-692. [13] 钟志贤,蔡忠侯,祁雁英. 单自由度磁悬浮系统无模型自适应控制的研究[J]. 西南交通大学学报,2022,57(3):549-557,581.ZHONG Zhixian, CAI Zhonghou, QI Yanying. Model-free adaptive control for single-degree-of-freedom magnetically levitated system[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 549-557,581. [14] 贺艳晖,甘杨俊杰,周亮. 主动磁悬浮轴承在余热发电机的应用研究[J]. 西南交通大学学报,2022,57(3):657-664. doi: 10.3969/j.issn.0258-2724.20210860HE Yanhui, GAN Yangjunjie, ZHOU Liang. Application of active magnetic bearing in waste heat generator[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 657-664. doi: 10.3969/j.issn.0258-2724.20210860 [15] ASAMA J, SHINSHI T, HOSHI H, et al. A new design for a compact centrifugal blood pump with a magnetically levitated rotor[J]. ASAIO Journal, 2004, 50(6): 550-556. doi: 10.1097/01.MAT.0000144364.62671.5A [16] 关勇,李红伟,刘淑琴. 轴流式磁悬浮人工心脏泵磁悬浮轴承系统设计[J]. 山东大学学报(工学版),2011,41(1):151-155.GUAN Yong, LI Hongwei, LIU Shuqin. System design of magnetic bearings in an axial-flow artificial blood pump[J]. Journal of Shandong University (Engineering Science), 2011, 41(1): 151-155. 期刊类型引用(4)
1. 姜豪, 苏振中, 姜亚鹏. 高承载力密度磁轴承优化设计. 西南交通大学学报. 2025(04)  本站查看
本站查看2. 唐晓轩, 杜国伟, 孙喆, 赵雷. HTR-PM主氦风机转子系统响应分析与载荷优化. 西南交通大学学报. 2025(04) 本站查看3. 林俊亭, 陈信州. 基于高增益扰动观测器的磁悬浮球系统滑模控制. 北京航空航天大学学报. 2025(06)  百度学术
百度学术4. 刘欣, 袁鹏禹. 新型异极径向混合磁悬浮轴承的建模及仿真. 西南交通大学学报. 2025(04) 本站查看其他类型引用(2)
-

 下载:
下载:
 下载:
下载:

 百度学术
百度学术


 点击查看大图
点击查看大图
计量
- 文章访问数: 516
- HTML全文浏览量: 182
- PDF下载量: 69
- 被引次数: 6