

Two-Degree-of-Freedom Maglev Platform for Micro Machining
-
摘要:
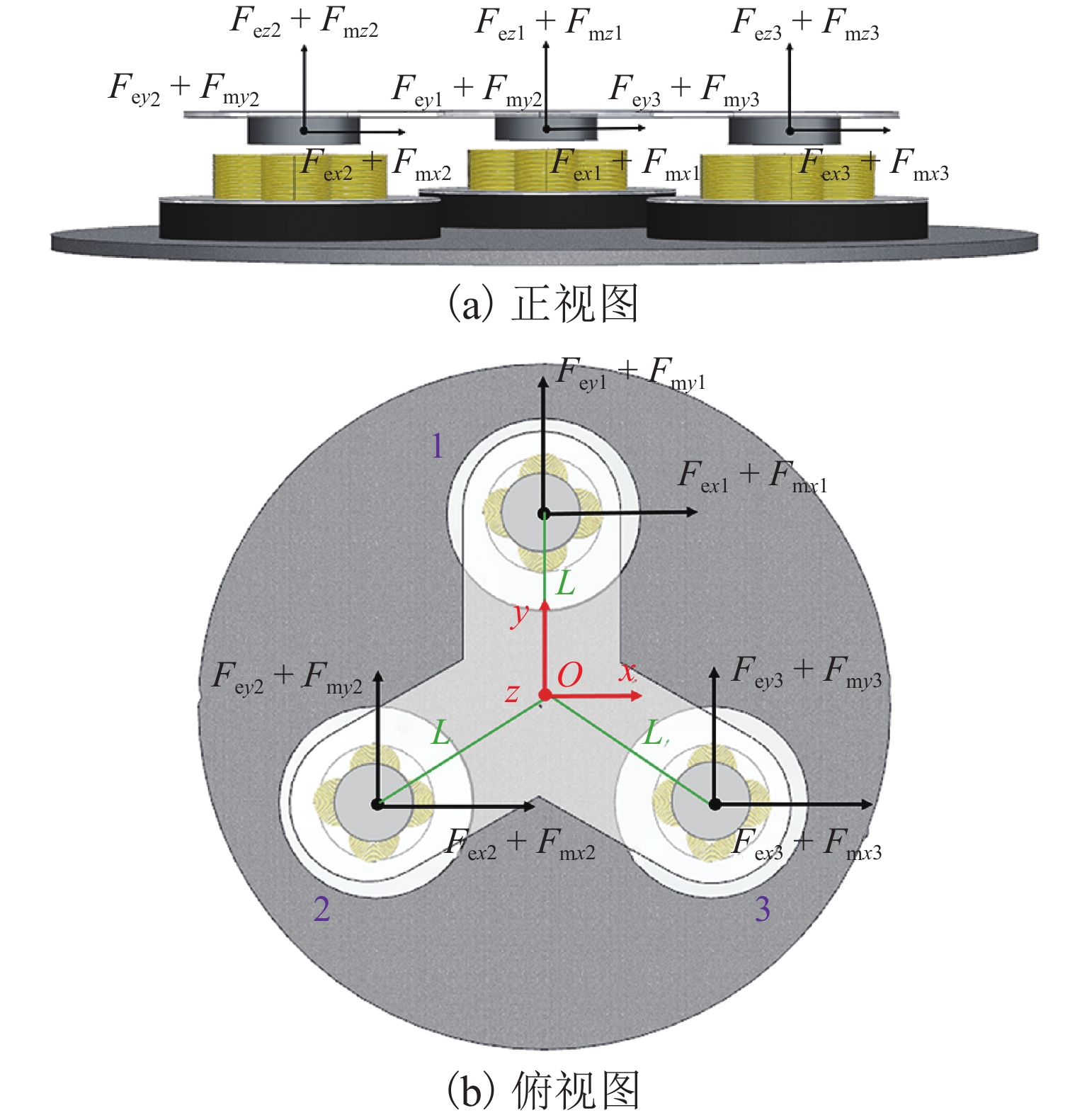
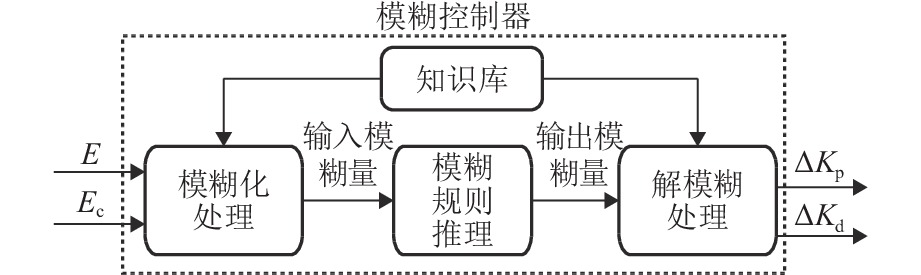
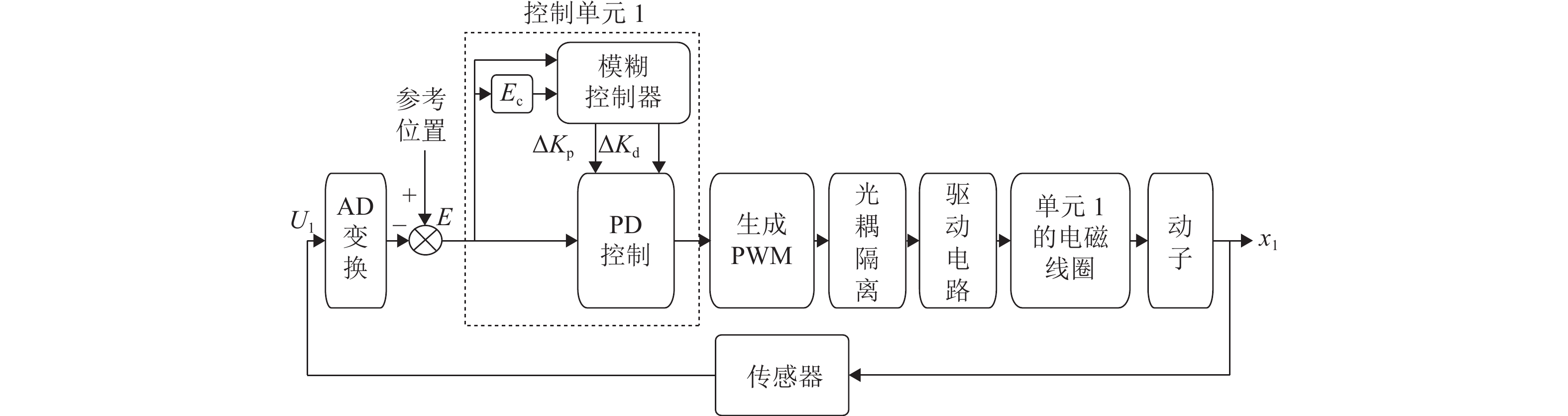
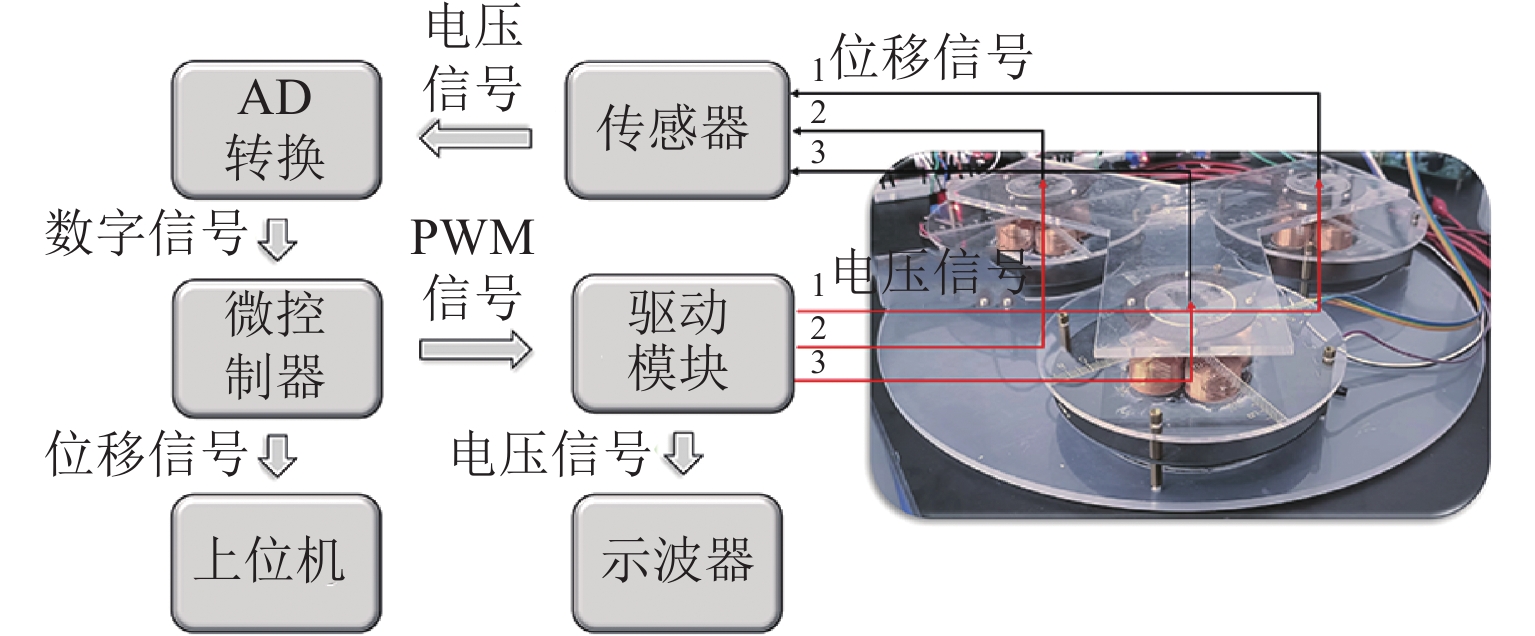
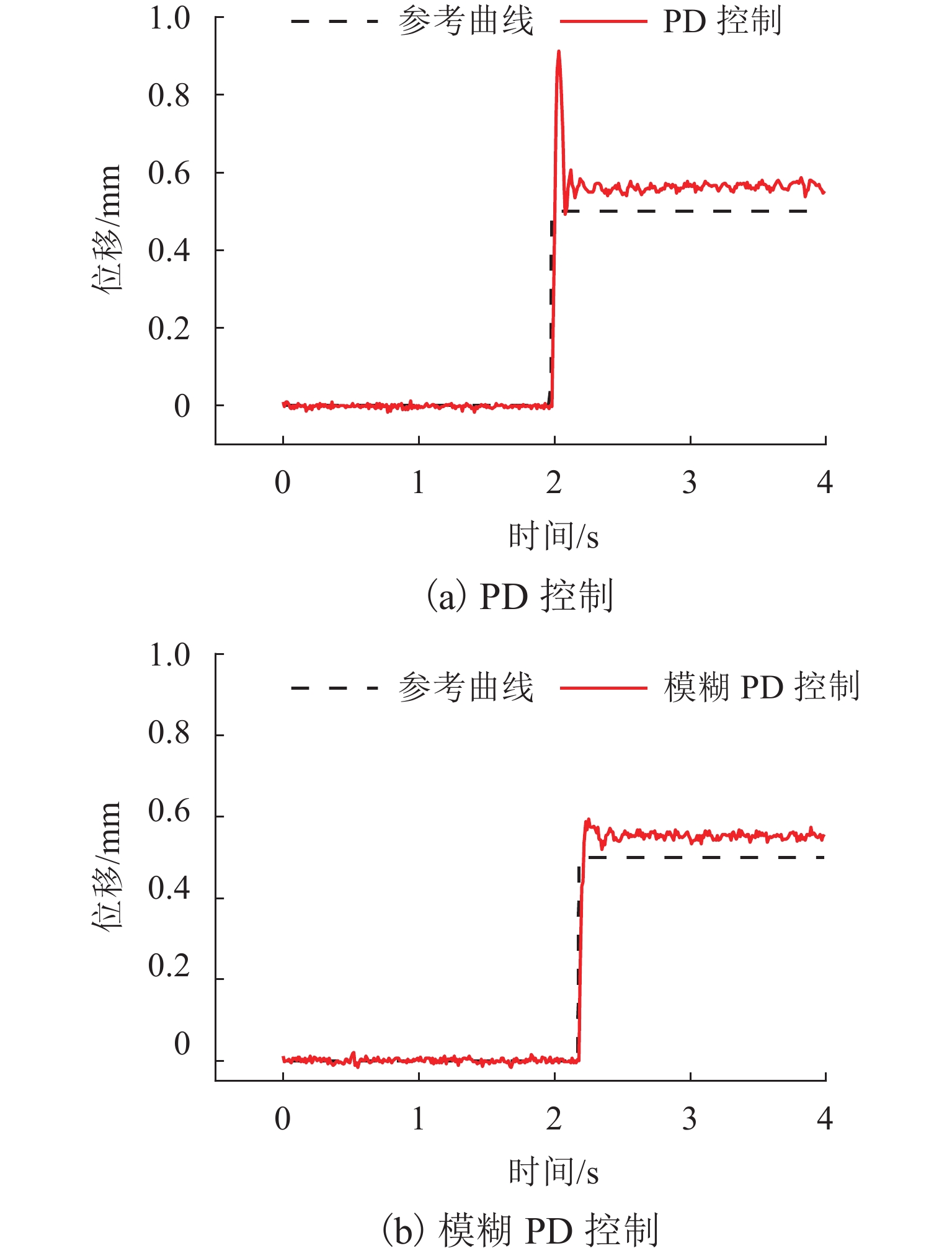
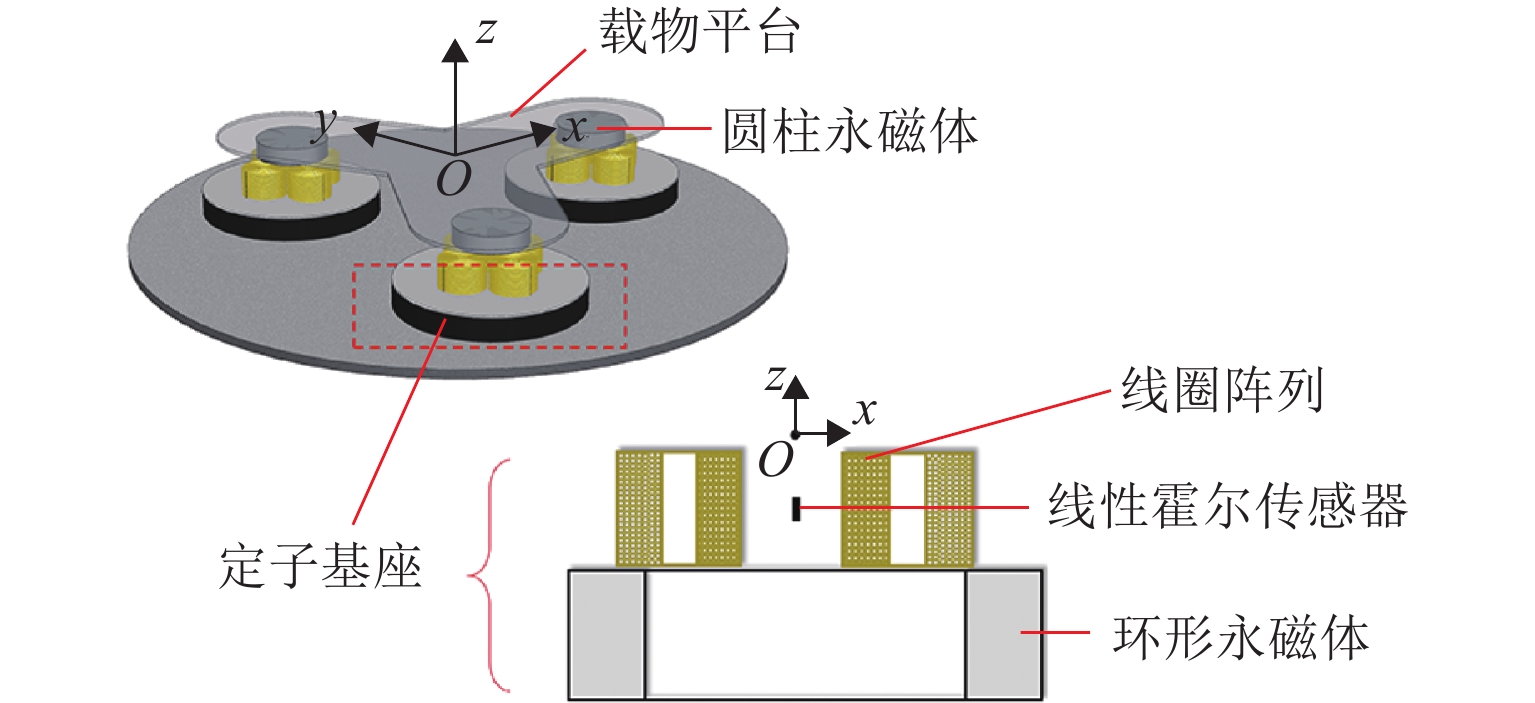
为消除激光微细加工移动台中的机械摩擦,提出一种由三组子单元共同悬浮驱动的新型磁浮平台. 首先,介绍平台结构及其工作原理,三组子单元具有相同的结构,由永磁体和电磁线圈构成;分析线圈对永磁体的作用力,并对磁悬浮平台能够实现稳定悬浮的平面范围进行讨论;其次,建立磁悬浮平台的平面内的动力学模型以及子单元位移与平台位移的变换方程;再者,基于分散控制策略,设计子单元系统相应的模糊PD (proportional-derivative)控制器;最后,搭建实物平台,并对其进行静态悬浮实验、步进响应实验、双轴组合工作实验. 结果表明:该磁悬浮平台在 ±2 mm的平面范围内可忽略竖直方向的运动控制;在静态悬浮时,磁悬浮平台在
x 方向均方根误差仅为2.95 μm,最大跟踪误差为11 μm;同时磁悬浮平台具备4 mm的运动行程以及双轴组合工作能力.Abstract:In order to eliminate mechanical friction in the mobile laser table for micro machining, a new maglev platform jointly driven by three sets of levitated subunits was proposed in this paper. Firstly, the platform structure and working principle were introduced. The three sets of subunits had the same structure, consisting of permanent magnets and electromagnetic coils; the force of the coils applying on the permanent magnets was analyzed, and the plane range in which the maglev platform could achieve stable levitation was discussed. Secondly, the in-plane dynamics model of the maglev platform was established, and the equation of the transformation relationship between the displacement of the subunit and that of the platform was built. Subsequently, based on the decentralized control strategy, the corresponding fuzzy proportional-derivative controller of the subunit system was designed. Finally, a physical platform was built, and the static levitation experiment, step response experiment, and two-axis combined working experiment were conducted on the platform. The results show that the maglev platform can ignore the motion control in the vertical direction within the plane range of ±2 mm, and it has a root mean squared error in the
x direction of only 2.95 μm and a maximum tracking error of 11 μm during static levitation. Meanwhile, the maglev platform has a motion displacement of 4 mm and two-axis combined working ability. -
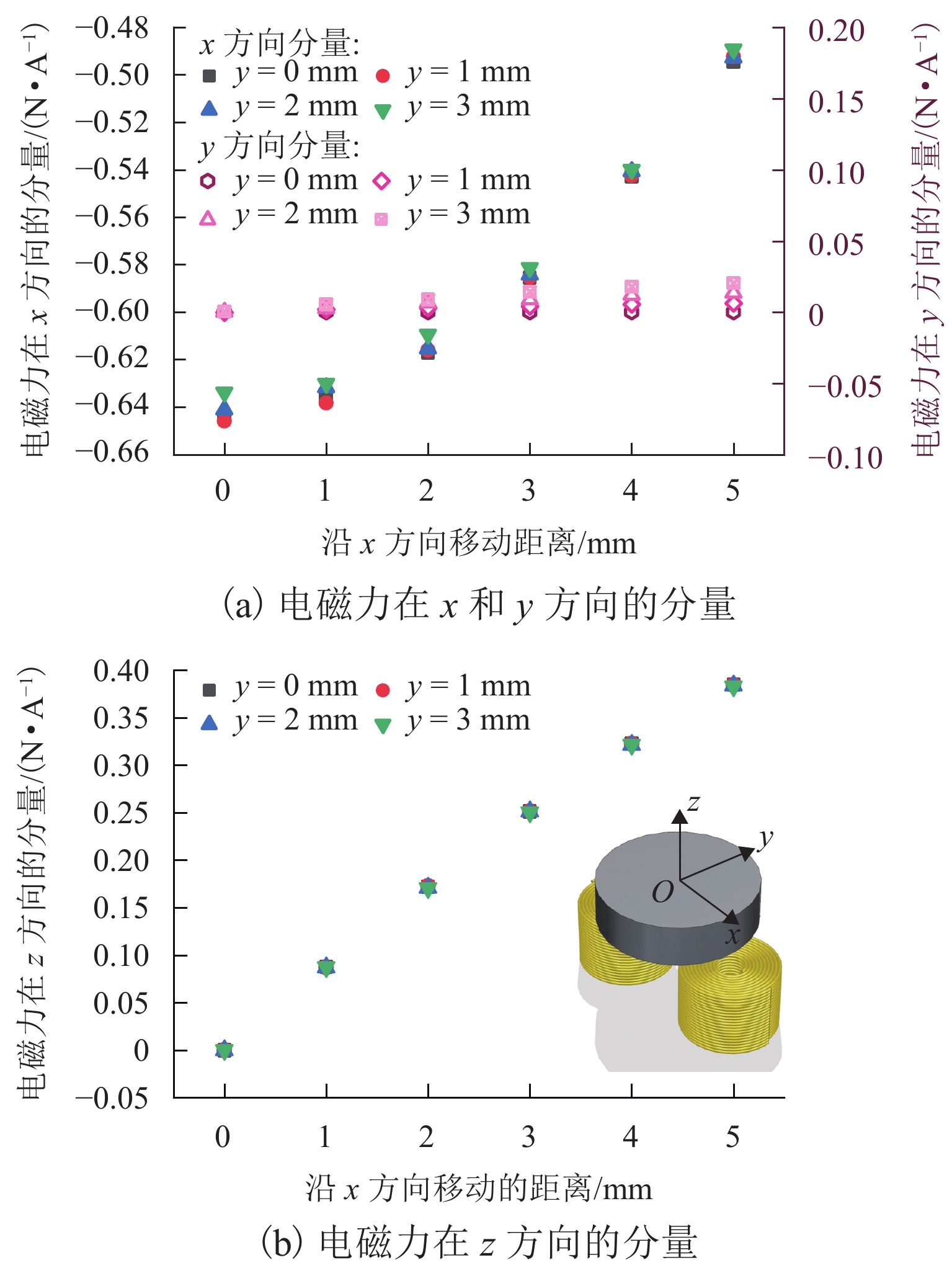
图 2 不同偏移距离下电磁力在x、y、z方向的分量
Figure 2. Components of electromagnetic force in x, y, and z directions at different offset distances
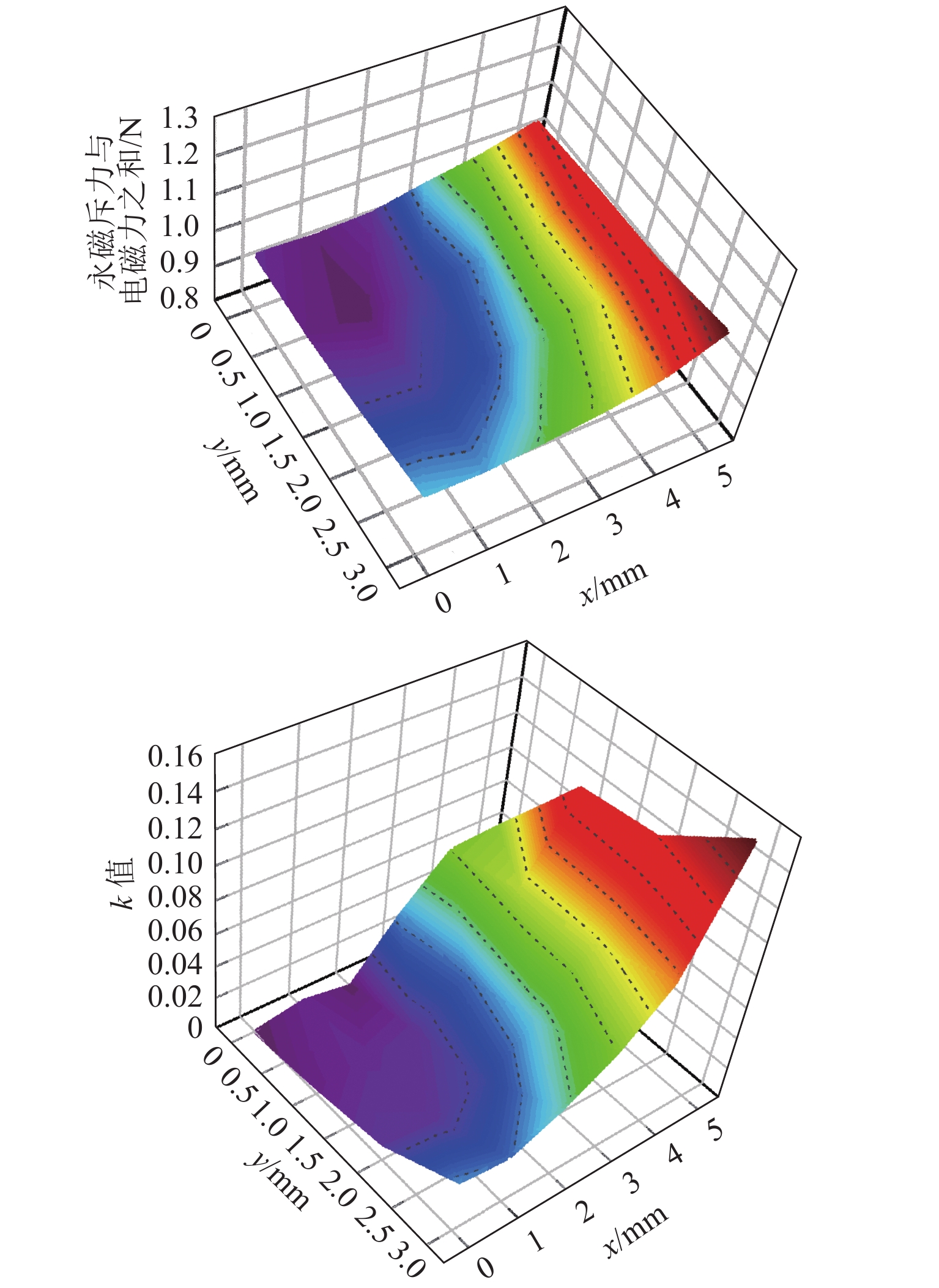
图 3 竖直方向上的电磁力与永磁斥力之和以及k值
Figure 3. Sum of electromagnetic force and permanent magnet repulsion in vertical direction and k value
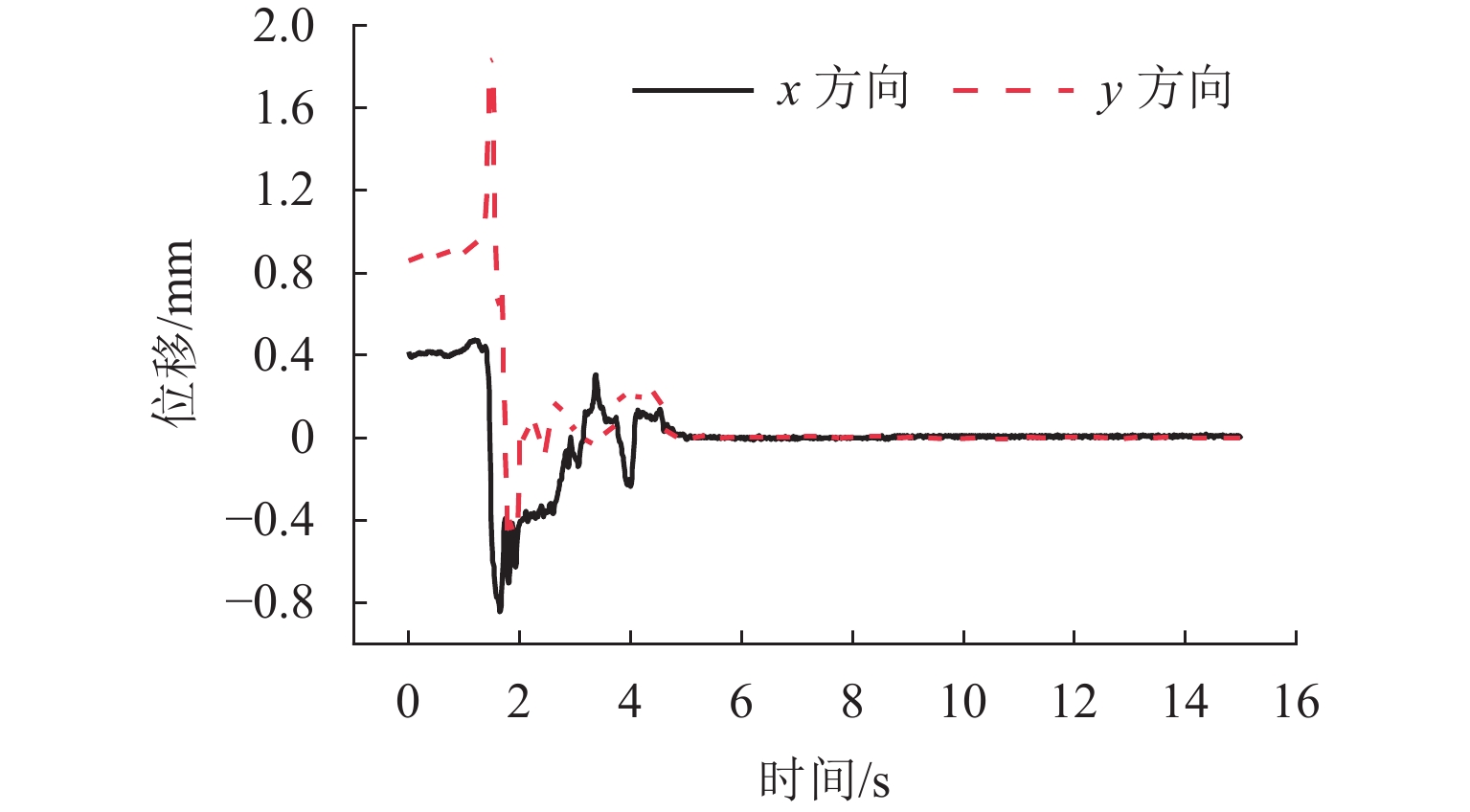
图 10 磁悬浮平台在x、y方向的静态悬浮过程
Figure 10. Static levitation process of maglev platform in x and y directions
表 1 拟合后的各项系数
Table 1. Various coefficients after fitting
系数 km1/(N·m−1) ke1/(N·m−1) kI1/(N·A−1) 数值 42.030 0.039 −0.617  下载: 导出CSV
下载: 导出CSV
表 2 模糊控制器参数
Table 2. Parameters of fuzzy controller
项目 E Ec ΔKp ΔKd 基本论域 [−2,2] [−1,1] [−0.01,0.01] [−0.1,0.1] 模糊论域 [−6,6] [−6,6] [−6.00,6.00] [−6.0,6.0] 模糊子集 {NB,NM,NS,ZO,PS,PM,PB} 量化因子 1/3 1/6 1/600 1/60
下载: 导出CSV
表 3 ΔKp的模糊规则
Table 3. Fuzzy rule of ΔKp
Ec E NB NM NS ZO PS PM PB NB NB NB NM ZO ZO ZO PS NM NB NM NM ZO ZO PS PS NS NM NM NS ZO PS PM PM ZO NM NM NS NS PS PM PM PS NM NS NS NS NM PB PB PM NS NS ZO PM PM PB PB PB ZO ZO ZO PM PB PB PB
下载: 导出CSV
表 4 ΔKd的模糊规则
Table 4. Fuzzy rule of ΔKd
Ec E NB NM NS ZO PS PM PB NB PS ZO ZO ZO ZO PB PB NM NS NS NS NS ZO PS PS NS NB NM NS ZO PS PS PS ZO NB NM NM NS PS PS PM PS NB NB NM NS ZO PS PM PM NM NS NS NS ZO PS PM PB PS PS ZO ZO ZO PB PB
下载: 导出CSV
-
[1] 张凯锋,雷鹍. 面向微细制造的微成形技术[J]. 中国机械工程,2004,15(12): 1121-1127.ZHANG Kaifeng, LEI Kun. Microforming technology facing to the micromanufacture[J]. China Mechanical Engineering, 2004, 15(12): 1121-1127. [2] 张朝阳,陈飞,王耀民,等. 纳秒脉冲激光对水下靶材的掩模微细刻蚀加工[J]. 纳米技术与精密工程,2011,9(2): 180-184. doi: 10.13494/j.npe.2011.033ZHANG Zhaoyang, CHEN Fei, WANG Yaomin, et al. Mask-integrated micro-etching of underwater workpiece with nanosecond pulse laser[J]. Nanotechnology and Precision Engineering, 2011, 9(2): 180-184. doi: 10.13494/j.npe.2011.033 [3] 钱振华, 王荣扬, 何彦虎. 飞秒激光微细加工系统装备的设计与开发[J]. 制造技术与机床, 2015, (9): 62-65.QIAN Zhenhua, WANG Rongyang, HE Yanhu. Design and development of femtosecond laser micro-machining equipment [ J ]. Manufacturing Technology & Machine Tool, 2015, ( 9 ) : 62-65. [4] 李平雪,辛承聪,高健,等. 皮秒激光加工研究进展与展望[J]. 激光与红外,2018,48(10): 1195-1203. doi: 10.3969/j.issn.1001-5078.2018.10.001LI Pingxue, XIN Chengcong, GAO Jian, et al. Research progress and development of picosecond laser processing[J]. Laser & Infrared, 2018, 48(10): 1195-1203. doi: 10.3969/j.issn.1001-5078.2018.10.001 [5] 郭兵, 刘文超, 赵清亮, 等. 水辅助激光微细加工技术进展[J]. 哈尔滨工业大学学报, 2020, 52(7): 11-19.GUO Bing, LIU Wenchao, ZHAO Qingliang, et al. Review of water assisted laser micro-machining technology [ J ]. Journal of Harbin Institute of Technology, 2020, 52 ( 7 ) : 11-19. [6] 邓自刚,刘宗鑫,李海涛,等. 磁悬浮列车发展现状与展望[J]. 西南交通大学学报,2022,57(3): 455-474, 530.DENG Zigang, LIU Zongxin, LI Haitao, et al. Development status and prospect of maglev train[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 455-474, 530. [7] 翟婉明,赵春发. 现代轨道交通工程科技前沿与挑战[J]. 西南交通大学学报,2016,51(2): 209-226. doi: 10.3969/j.issn.0258-2724.2016.02.001ZHAI Wanming, ZHAO Chunfa. Frontiers and challenges of sciences and technologies in modern railway engineering[J]. Journal of Southwest Jiaotong University, 2016, 51(2): 209-226. doi: 10.3969/j.issn.0258-2724.2016.02.001 [8] 唐任远,赵清,周挺. 稀土永磁电机正进入大发展的新时期[J]. 沈阳工业大学学报,2011,33(1): 1-8,30.TANG Renyuan, ZHAO Qing, ZHOU Ting. Rare earth permanent magnet electrical machines stepping a new period of rapid development[J]. Journal of Shenyang University of Technology, 2011, 33(1): 1-8,30. [9] 张维煜,朱熀秋,袁野. 磁悬浮轴承应用发展及关键技术综述[J]. 电工技术学报,2015,30(12): 12-20.ZHANG Weiyu, ZHU Huangqiu, YUAN Ye. Study on key technologies and applications of magnetic bearings[J]. Transactions of China Electrotechnical Society, 2015, 30(12): 12-20. [10] 张雯雯, 张新兰, 魏颖婕, 等. 应用于IC制造领域的磁悬浮定位平台综述[J]. 机床与液压, 2017, 45(7): 162-166, 113.ZHANG Wenwen, ZHANG Xinlan, WEI Yingjie, et al. Review of magnetic suspension positioning platform used in the IC manufacturing field [J]. Machine Tool and Hydraulics, 2017, 45 (7) : 162-166, 113. [11] 景敏卿,刘恒,梁金星,等. 二维高精度磁悬浮定位平台的研究[J]. 西安交通大学学报,2008,42(11): 1377-1381.JING Minqing, LIU Heng, LIANG Jinxing, et al. Two-dimensional high precision positioning maglev stage[J]. Journal of Xi’an Jiaotong University, 2008, 42(11): 1377-1381. [12] ZHOU H B, DENG H, DUAN J A. Hybrid fuzzy decoupling control for a precision maglev motion system[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(1): 389-401. doi: 10.1109/TMECH.2017.2771340 [13] BERKELMAN P, DZADOVSKY M. Magnetic levitation over large translation and rotation ranges in all directions[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(1): 44-52. doi: 10.1109/TMECH.2011.2161614 [14] ZHANG X D, TRAKARNCHAIYO C, ZHANG H, et al. MagTable: a tabletop system for 6-DOF large range and completely contactless operation using magnetic levitation[J]. Mechatronics, 2021, 77: 102600.1-102600.10. doi: 10.1016/j.mechatronics.2021.102600 [15] XU FC, GUO YQ, ZHOU R, et al. Analysis of structure factors affecting suspension force of permanent magnet system with variable magnetic flux path control[J]. International Journal of Applied Electromagnetics and Mechanics, 2020, 64(1/2/3/4): 1495-1504. doi: 10.3233/JAE-209470 [16] ZHANG L, KOU B Q, ZHANG H, et al. Characteristic analysis of a long-stroke synchronous permanent magnet planar motor[J]. IEEE Transactions on Magnetics, 2012, 48(11): 4658-4661. doi: 10.1109/TMAG.2012.2198051 [17] NGUYEN V H, KIM W J. Two-phase lorentz coils and linear halbach array for multiaxis precision-positioning stages with magnetic levitation[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(6): 2662-2672. doi: 10.1109/TMECH.2017.2769160 [18] KOU B Q, XING F, ZHANG L, et al. A real-time computation model of the electromagnetic force and torque for a maglev planar motor with the concentric winding[J]. Applied Sciences, 2017, 7(1): 7010098.1-7010098.14. doi: 10.3390/app7010098 [19] HU C X, WANG Z, ZHU Y, et al. Performance-oriented precision LARC tracking motion control of a magnetically levitated planar motor with comparative experiments[J]. IEEE Transactions on Industrial Electronics, 2016, 63(9): 5763-5773. doi: 10.1109/TIE.2016.2538743 [20] NGUYEN V H, KIM W J. Novel electromagnetic design for a precision planar positioner moving over a superimposed concentrated-field magnet matrix[J]. IEEE Transactions on Energy Conversion, 2012, 27(1): 52-62. doi: 10.1109/TEC.2011.2170173 [21] 王丽梅,张宗雪. H型精密运动平台交叉耦合模糊PID同步控制[J]. 沈阳工业大学学报,2018,40(1): 1-5. doi: 10.7688/j.issn.1000-1646.2018.01.01WANG Limei, ZHANG Zongxue. Cross-coupled fuzzy PID synchronous control for H-type precision motion platform[J]. Journal of Shenyang University of Technology, 2018, 40(1): 1-5. doi: 10.7688/j.issn.1000-1646.2018.01.01 [22] 朱国昕,雷鸣凯,赵希梅. 永磁同步电机伺服系统自适应迭代学习控制[J]. 沈阳工业大学学报,2018,40(1): 6-11. doi: 10.7688/j.issn.1000-1646.2018.01.02ZHU Guoxin, LEI Mingkai, ZHAO Ximei. Adaptive iterative learning control for permanent magnet synchronous motor servo system[J]. Journal of Shenyang University of Technology, 2018, 40(1): 6-11. doi: 10.7688/j.issn.1000-1646.2018.01.02 [23] 邹圣楠, 刘畅, 邓舒同, 等. 基于混合斥力式磁浮平台的解耦及控制分析[J]. 西南交通大学学报, 2022, 57(3): 540-548.ZOU Shengnan, LIU Chang, DENG Shutong, et al. Decoupling and control stability analysis based on hybrid repulsion maglev platform[ J ]. Journal of Southwest Jiaotong University, 2022, 57 ( 3 ) : 540-548. [24] 陈启会, 李群明, 胥晓. 平面型磁悬浮平台的结构与分散控制[J]. 机械设计与研究, 2013, 29(2): 21-25.CHEN Qihui, LI Qunming, XU Xiao. Structure and decentralized control of planar magnetic levitation platform[J]. Mechanical Design and Research, 2013, 29(2) : 21-25. [25] 赵川,孙凤,裴文哲,等. 永磁悬浮平台的分散串级控制方法[J]. 西南交通大学学报,2022,57(3): 619-626. doi: 10.3969/j.issn.0258-2724.20210960ZHAO Chuan, SUN Feng, PEI Wenzhe, et al. Independent cascade control method for permanent magnetic levitation platform[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 619-626. doi: 10.3969/j.issn.0258-2724.20210960 期刊类型引用(1)
1. 陈建,邓舒同,邹圣楠,郑伟龙. 混合式磁浮系统霍尔传感器安装位置分析. 微特电机. 2025(04): 28-33 .  百度学术
百度学术其他类型引用(3)
-

 下载:
下载:
 百度学术
百度学术
 点击查看大图
点击查看大图
计量
- 文章访问数: 396
- HTML全文浏览量: 113
- PDF下载量: 26
- 被引次数: 4