

Influence of Maintenance Rail Position and Guide Vanes on Vortex-Induced Vibration Performance of Flat Box Girders
-
摘要:
为研究检修车轨道位置与导流板对宽体扁平箱梁断面涡振性能的影响,以深中通道伶仃洋大桥(大跨度宽体扁平钢箱梁悬索桥)为背景,通过1∶25节段模型风洞试验测试了主梁的涡振响应,并采用计算流体动力学方法(CFD)对断面的二维流场进行了模拟. 结果表明:增大检修车轨道与主梁底板边缘之间距离
l 能够显著提高宽体扁平钢箱梁的涡振性能,当l⩾Wb/6 (Wb 为主梁底部宽度)时,可完全消除宽体扁平箱梁在各风攻角下的涡激振动;在检修车轨道处设置17° 倾角的内侧或双侧导流板均能够显著抑制梁体的涡激振动,且抑制效果相同,当l⩾Wb/10 时,布置导流板可完全消除梁体的涡激振动;增大检修车轨道与主梁底板边缘之间距离以及设置导流板均是通过消除断面下游斜腹板处的尾流漩涡,从而降低梁体受到的周期性涡激力,达到抑制主梁涡振的效果.Abstract:To study the influence of the maintenance rail position and the guide vanes on the vortex-induced vibration (VIV) performance of the wide flat box girder section, the Lingdingyang Bridge (a long-span suspension bridge with wide flat steel box girder) is taken as an example. The VIV of the main girder is studied using a 1∶25 scale section model wind tunnel test, and the two-dimensional flow field of the cross section is simulated using computational fluid dynamics. The test results show that increasing
l (the distance between the maintenance rail and the bottom edge of the main girder) can significantly improve the VIV performance of a wide flat box girder. Whenl⩾Wb/6 (Wb is the bottom width of the main girder), the VIV of the girder can be completely eliminated under different wind attack angles. Installing a guide vane with a 17° angle inside or on both sides of the maintenance rail can significantly suppress the VIV of the girder, and the suppression effect is the same. Whenl⩾Wb/10 , the installation of the guide vane can completely eliminate the VIV of the girder. The numerical simulation results show that increasing the distance between the maintenance rail and the bottom edge of the girder and setting a guide vane can both significantly reduce the periodic vortex-induced force of the main girder by eliminating the wake vortex at the inclined web downstream of the section, thereby suppressing the VIV of the girder. -
随着桥梁跨径的不断增加,扁平钢箱梁因其质量轻、截面刚度大、稳定性好的特点,被广泛应用于大跨度悬索桥设计中[1]. 相比桁架梁与开口箱梁这类钝体断面,扁平钢箱梁涡振性能受桥面附属结构(如桥面栏杆、检修轨道)的影响较大[2-4],极易被诱发涡激振动. 涡激振动是一种由气体来流流经结构后产生的交替性漩涡脱落所引起的带有自激和限幅性质的风致振动. 2020年,我国已建成的广东虎门大桥(扁平钢箱梁断面)也发生了显著的涡激振动现象,此次涡振的发生使桥梁的正常运营受到影响,同时也引起了不小的舆论风波. 因此,需采取一系列气动控制措施改善扁平钢箱梁断面的涡振性能,使得该类主梁断面在常遇的情况下能够正常使用是十分必要的.
针对以上主题,国内外学者已开展了相关研究,并提出了一些解决方案. Larsen等[5-6]研究了桥面外形的改变对扁平箱梁涡振性能的影响,发现桥面栏杆会显著降低箱梁的涡振性能,而导流板则能有效抑制箱梁的涡激振动. Nagao等[7]通过风洞试验研究了护栏的位置与尺寸对扁平箱梁的竖弯涡振响应的影响规律. Chen等[8]采用1∶50与1∶20节段模型风洞试验分别研究了风障与阻尼比对某宽高比为8.6的整体箱梁涡振振幅的影响. Zhan等[9]通过1∶80节段模型风洞试验对某宽高比为7.75的整体箱梁涡振制振措施进行了研究,发现采用适当波长与高度的外侧栏杆可显著抑制该梁体的涡激振动. 李浩弘等[10]通过1∶60节段模型风洞试验并采用三维大涡模拟,研究了桥面附属构件对某宽高比为12的扁平箱梁涡振性能的影响,发现提高人行护栏透风率可有效降低断面涡振振幅且缩短 + 3° 和 + 5° 风攻角下的涡振风速锁定区范围,内移检修车轨道也能够显著降低主梁的涡振振幅. 张建等[11]通过1∶50节段模型风洞试验发现在风嘴位置安装导流板可以有效抑制某宽高比为12的扁平钢箱梁的涡激振动. 刘君等[12]通过1∶50节段模型风洞试验并结合计算流体力学(CFD)研究了某宽高比为10.7的扁平钢箱梁的涡振特性,研究表明在检修车轨道处设置导流板可以有效提高主梁的涡振性能. 李明等[13-14]采用1∶50节段模型风洞试验研究了风嘴、检修车轨道、导流板、抑振板和检修道栏杆对某宽高比为10.4的扁平箱梁涡振性能的影响,并通过1∶27节段模型试验验证了高透风率检修道栏杆的制振效果. 朱思宇等[15]通过1∶40风洞试验研究了大攻角来流作用下检修车轨道位置和检修车轨道导流板位置、桥面防撞护栏类型、人行道防撞护栏类型以及阻尼比对某宽高比为11.2的扁平钢箱梁涡激振动性能的影响. 孙延国等[16]通过1∶20大尺度节段模型风洞试验发现在某宽高比为11.1的扁平钢箱梁检修车轨道内侧布置导流板能将主梁底板的气流引离尾部,从而起到抑制主梁涡激振动的效果. 胡传新等[17-18]以某宽高比为10.7的扁平钢箱梁为研究对象,进行了大尺度节段模型测振、测压风洞试验和计算流体动力学方法数值模拟发现,在栏杆扶手处设置抑流板可以有效避免边防撞栏杆转角部分的气体流动分离,从而消除梁体涡激振动.
1998年主跨为1624 m的丹麦大贝尔特东桥引桥发生大幅涡振现象,Schewe等[19-20]对该桥断面进行风洞试验发现其三分力系数在不同雷诺数下变化较大,且实桥实测涡振频率和涡振振幅均与低风速下风洞试验结果不一致,由此引起各国学者就雷诺数对桥梁涡激振动影响这一问题的广泛关注[21]. Scanlan[22]发现随着桥梁跨度的增大与主梁断面的流线化,雷诺数带来的影响必须给予充分的重视. 李加武等[23]通过大比例尺节段模型试验发现,相比钝体桥梁断面,流线型断面受雷诺数效应的影响更大. 熊龙等[24]通过对同一主梁断面进行1∶50与1∶20节段模型风洞试验对比发现,相同阻尼比下,高雷诺数模型存在2个涡振区间,而低雷诺数模型仅存在1个涡振区间. 董浩天等[25]基于闭口钢箱梁悬索桥1∶122全桥气弹模型、1∶60节段模型与1∶20节段模型这三组风洞试验发现,模型试验中涡振的尺度效应表现为尺寸增大后涡振风速锁定区间变窄并提前且振幅降低,同时指出对于扁平钢箱梁悬索桥的涡振试验研究,尤其针对低风速涡振现象,应尽量采用较大尺度的节段模型.
综上所述,扁平钢箱梁桥梁断面作为一种广泛应用的大跨度桥梁断面形式,其气动力特性呈现出对雷诺数的依赖性[26],为减小雷诺数效应以及细部构件模拟误差等影响,对扁平箱梁涡激振动的研究宜采用大尺度模型进行. 但是目前,已有的针对扁平箱梁涡激振动研究的文献几乎没有关于宽高比大于12.0的宽体扁平箱梁方面的报道,通过将大尺度模型风洞试验与数值模拟相结合从而对宽高比大于12.0的宽体扁平钢箱梁涡振性能进行研究的文献更是缺乏. 因此,需要对高雷诺数下宽体扁平钢箱梁的涡振性能进行研究.
本文以某主跨为1666 m的大跨度宽体扁平钢箱梁悬索桥为工程背景,在借鉴已有研究成果的基础上,在1∶25比例尺下开展了一系列节段模型风洞试验,研究了宽体扁平钢箱梁的涡激共振及制振措施. 通过改变检修车轨道位置与设置导流板,研究了检修车轨道位置以及导流板对主梁涡振性能的影响规律,并利用CFD研究了不同位置检修车轨道以及导流板对主梁涡振性能的影响机理.
1. 主梁涡振性能
1.1 工程背景
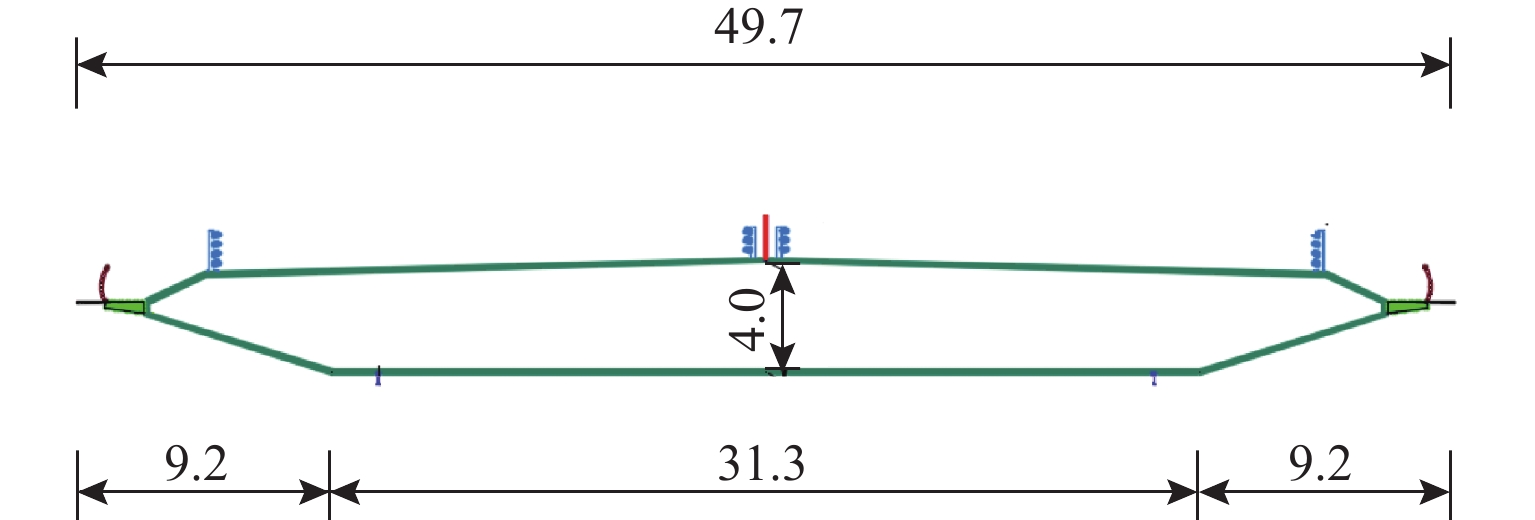
本文依托的背景工程为深中通道伶仃洋航道桥,该桥是一座用于连接深圳市和中山市的大跨度公路悬索桥,桥跨布置为500 + 1666 + 500=2666 m,桥塔高270 m,矢跨比1/9.65,具体如图1所示.
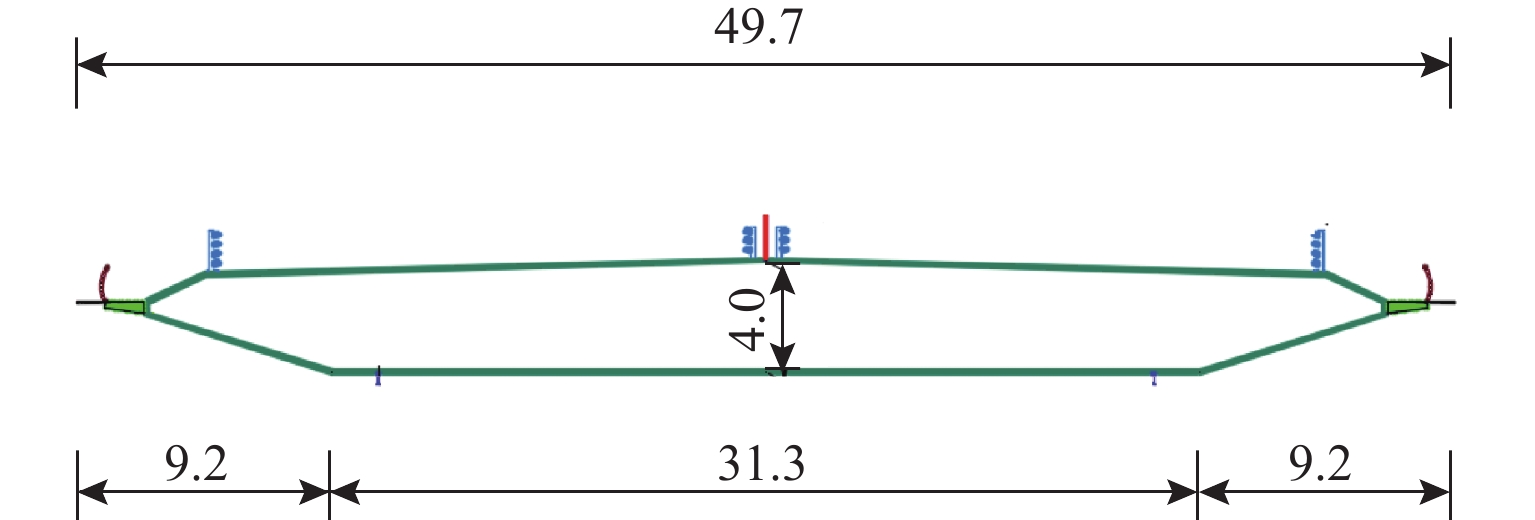
主梁采用双向八车道的宽体扁平钢箱梁,梁宽49.7 m,梁高4.0 m,宽高比达到12.425,为使该桥满足颤振设计要求,桥面中央安装有1.6 m高上中央稳定板,具体如图2所示.
1.2 试验参数
为了减小雷诺数效应以及细部构件模拟误差等影响造成的试验结果偏差[23-25],采用1∶25大比例尺节段模型风洞进行试验研究.
节段模型试验在西南交通大学XNJD-3大气边界层风洞中进行,该试验段截面尺寸为22.5 m(宽) × 4.5 m(高) × 24.5 m(长). 为满足风洞试验要求,基于主梁及风洞断面尺寸,试验模型缩尺比选用1∶25. 因此模型长度、宽度和高度分别为3.9、1.988 m和0.16 m,阻塞度小于5%. 主梁上表面进行蒙皮,栏杆与检修车轨道采用ABS塑料板制作,其中栏杆确保了透风率相似. 节段模型通过8根拉伸弹簧悬挂在风洞中,以确保模型可以发生竖弯和扭转振动,其中,上部4根弹簧刚度相同,刚度约为3920 N/m,下部4根弹簧刚度相同,刚度约为1270 N/m,试验模型如图3所示.
我国发布的《公路桥梁抗风设计规范》[27]建议钢箱梁桥的阻尼比取值为0.3%,考虑到该大跨度悬索桥的实际阻尼比可能低于该建议值的情况,为了确保节段模型风洞试验结果的可靠性,本次试验中竖弯阻尼比取为0.24%,扭转阻尼比取为0.10%. 根据规范计算得到该断面竖向涡激振动容许幅值为396.0 mm,扭转涡激振动容许幅值为0.417°. 节段模型试验主要参数取值如表1所示.
表 1 节段模型试验参数取值Table 1. Section model test parameters参数名称 实桥值 相似比 模型值 等效质量/(kg•m−1) 42156 1/252 67.45 等效质量惯性矩/
(kg•m2•m−1)10007344 1/254 25.62 竖弯频率/Hz 0.101 13.960 1.410 扭转频率/Hz 0.220 10.500 2.310 竖弯阻尼比/% 0.30 — 0.24 扭转阻尼比/% 0.30 — 0.10 1.3 原设计宽体扁平钢箱梁涡振性能
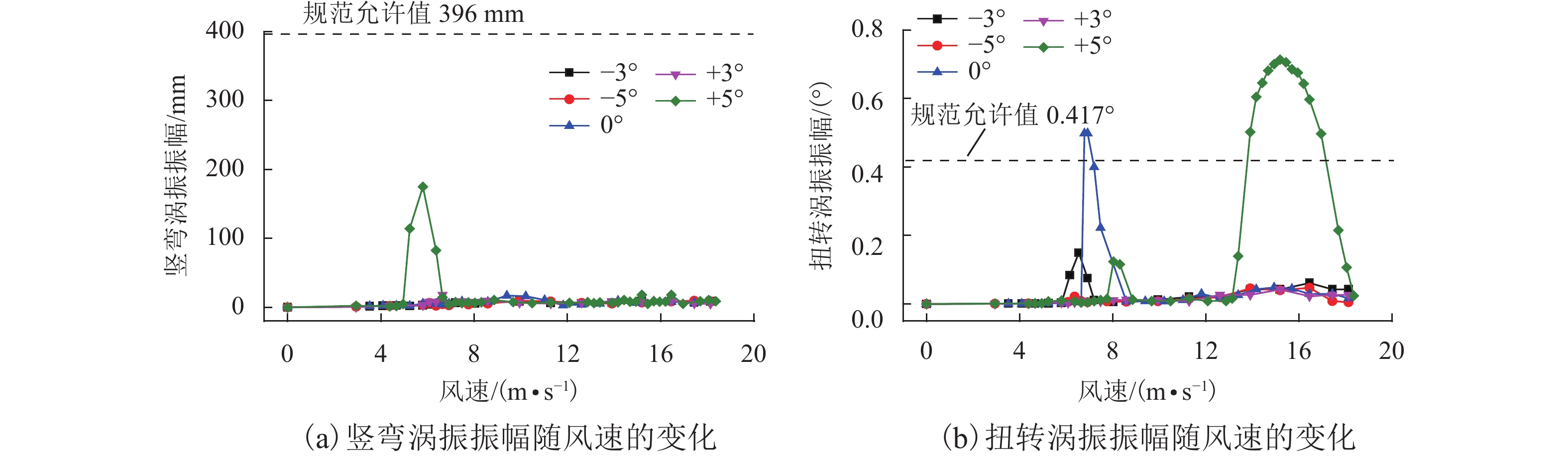
风洞试验分别在0°、±3°、±5° 风攻角下的均匀流中进行,试验中风速为0~10 m/s,对应实桥风速为0~18 m/s,风速间隔0.25 m/s,对应实桥风速间隔约0.50 m/s. 试验结果如图4所示(图中风速和振幅数据均已换算成实桥值).
 图 4 原设计断面主梁涡振响应Figure 4. Vortex-induced vibration displacement of the original section
图 4 原设计断面主梁涡振响应Figure 4. Vortex-induced vibration displacement of the original section具体现象描述如下:
1) 原设计箱梁断面仅在 +5° 风攻角下发生竖弯涡激振动,涡振振幅较小,最大振幅仅为涡振允许值的44.6%,其余风攻角下,主梁未发生竖弯涡激振动.
2) 在0° 与 −3° 风攻角下,原设计断面均存在一个低风速下扭转涡振区间(6~9 m/s),其中 −3° 风攻角下的最大扭转涡振振幅超过规范允许值. 在 +5° 风攻角下,原设计断面存在两个扭转涡振区间(7~9 m/s与13~18 m/s),其中高风速涡振区间(13~18 m/s)内的涡振振幅较大,最大扭转涡振振幅超过规范允许值71%.
试验结果表明,原设计宽体扁平箱梁断面存在显著的涡激振动现象,因此必须采取制振措施,保障桥梁运营期间的行车安全性.
2. 检修车轨道位置对扁平箱梁涡振性能的影响及机理研究
2.1 检修车轨道位置对涡振性能的影响
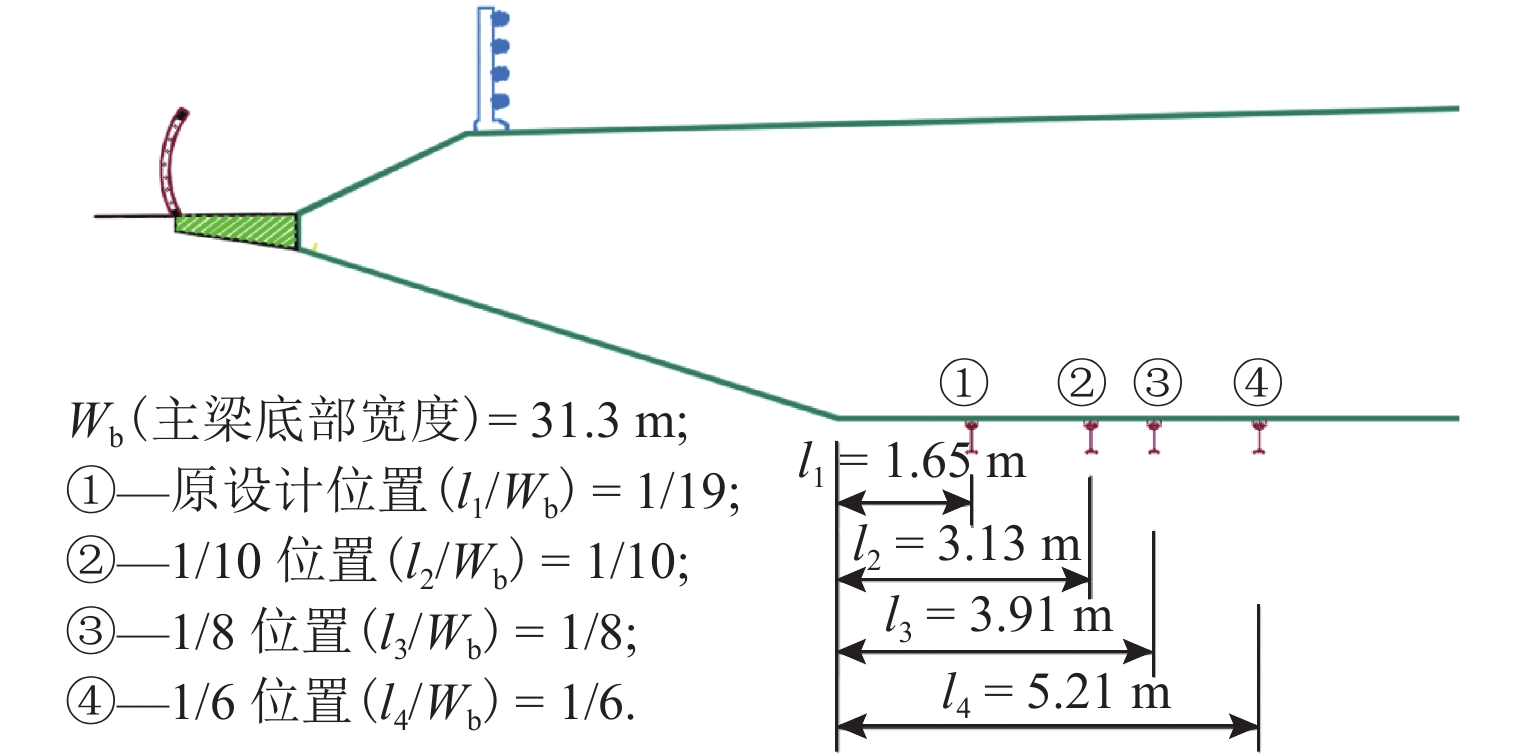
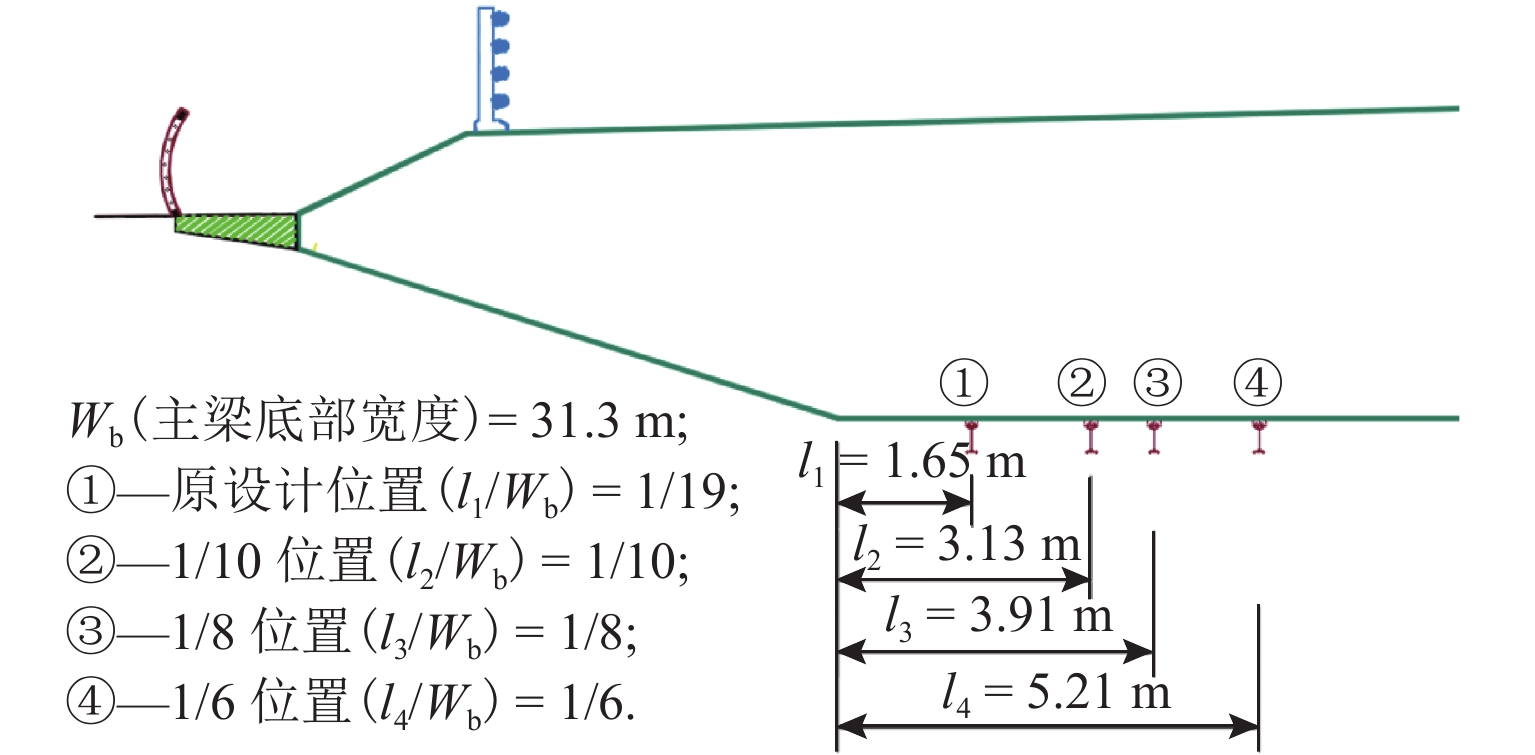
主梁的涡振性能对其气动外形的变化十分敏感,已有的研究成果[12,16]表明,改变检修车轨道位置能够显著影响扁平箱型主梁断面的涡振性能. 本文通过1∶25节段模型风洞试验测试了不同位置检修车轨道下主梁的涡振振幅(具体检修车轨道位置如图5所示),试验在0.24%竖弯阻尼比与0.10%扭转阻尼比下进行. 各工况在0°、±3° 和 ±5° 风攻角下的最大涡振振幅如表2所示(表中数据均已换算成实桥值).
表 2 检修车轨道各位置工况涡振幅值Table 2. VIV displacement of each working condition with different maintenance rail positions风攻角/(°) 竖弯涡振振幅/mm 扭转涡振振幅/(°) 1/6 位置 1/8 位置 1/10 位置 1/19 位置 1/6 位置 1/8 位置 1/10 位置 1/19 位置 0 6.4 7.0 5.3 17.1 0.01 0.07 0.55 0.50 +3 6.9 7.9 6.4 18.1 0.02 0.01 0.02 0.04 +5 7.9 7.6 6.8 174.9 0.02 0.02 0.45 0.71 −3 6.5 7.7 7.5 8.5 0.01 0.21 0.02 0.15 −5 7.2 8.5 7.9 9.7 0.02 0.02 0.03 0.05 如表2所示,当检修车轨道位于1/10位置工况以及在此基础上向梁中部移动形成的1/8位置、1/6位置工况时,主梁在各风攻角下均未发现竖向涡激振动,原设计断面在 +5° 风攻角下发生的大幅度竖向涡激振动被完全消除. 原设计断面(1/19位置工况)最大扭转涡振振幅为0.71°,将检修车轨道向主梁中部移动至1/10位置与1/8位置工况可分别将梁体最大扭转涡振振幅降低22.5%与70.4%,在1/6位置工况可完全消除主梁的扭转涡激振动.
综上可知,增大检修车轨道与主梁底板边缘之间的距离能够显著提高宽体扁平箱梁的涡振性能,当检修车轨道与梁底板边缘之间的距离
l⩾Wb/10 (主梁底部宽度)时,主梁的竖弯涡激振动被完全消除,当l⩾Wb/6 时,主梁的竖弯与扭转涡激振动均被完全消除.2.2 改变检修车轨道位置的影响机理
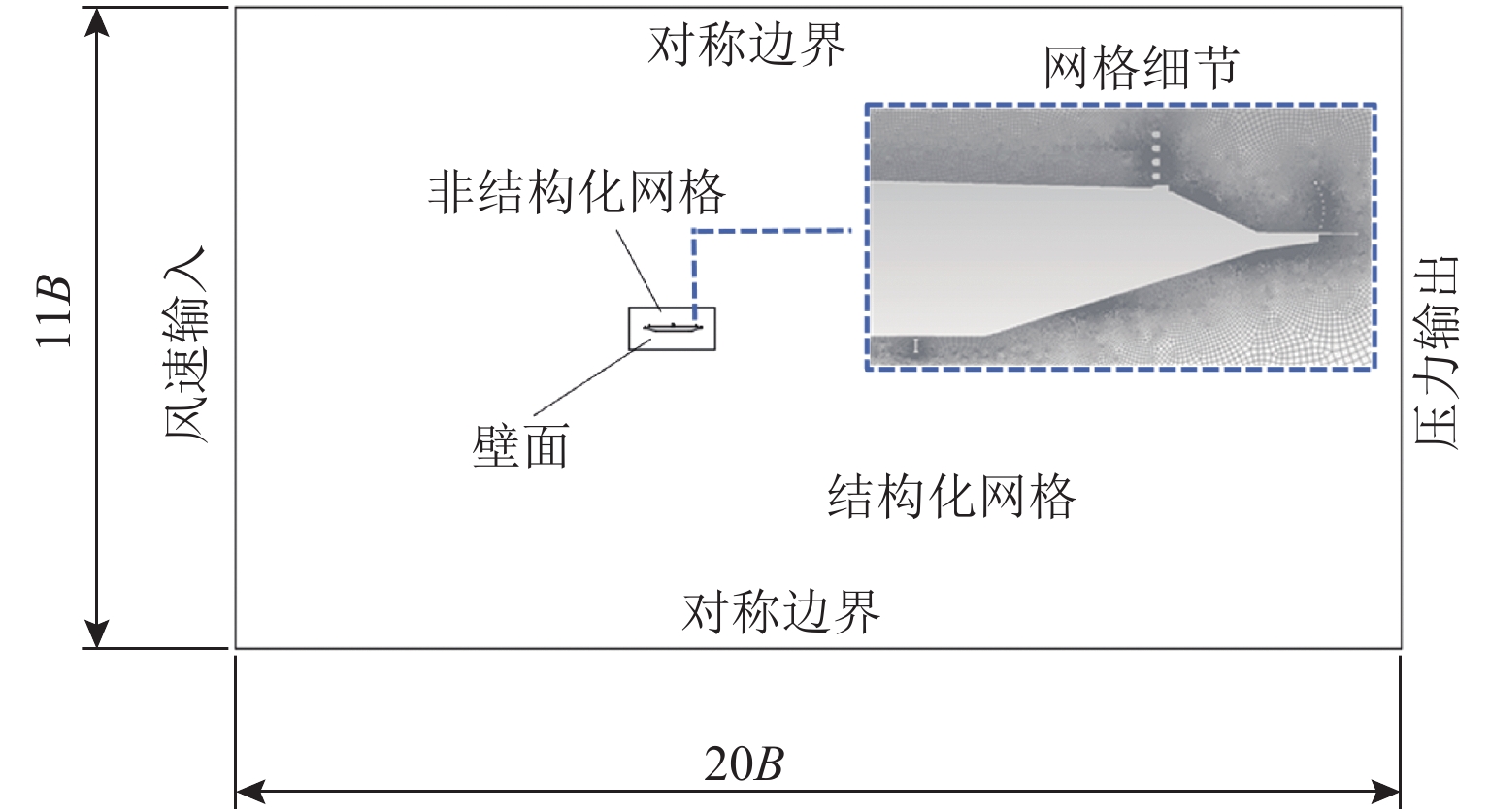
CFD作为一种方便高效的可以实现可视化的技术,被广泛应用在桥梁工程中,通过CFD技术模拟得到的主梁周围的流场结构可以帮助定性分析主梁的涡振激发机理和有效措施的制振机理. 本文借助Fluent软件,分别对1/19位置工况(原设计断面)与1/6位置工况断面在静止状态下的非定常绕流进行仿真模拟,计算断面如图6所示. 计算模型缩尺比选为1∶50,计算在 + 5° 风攻角下进行,风速取4 m/s,收敛项残差控制在0.0001,计算采用
SSTk-ω (shear stress transportk-ω )湍流模型[28],其余计算参数见表3. 由于篇幅限制,本文的研究仅限于对涡振起振时(梁体未振动)的绕流特性以及非定常气动力,不涉及梁体振动后产生的自激气动力.表 3 数值模拟参数设置Table 3. Parameters of the numerical simulation参数 湍流长度
尺度/m湍流强
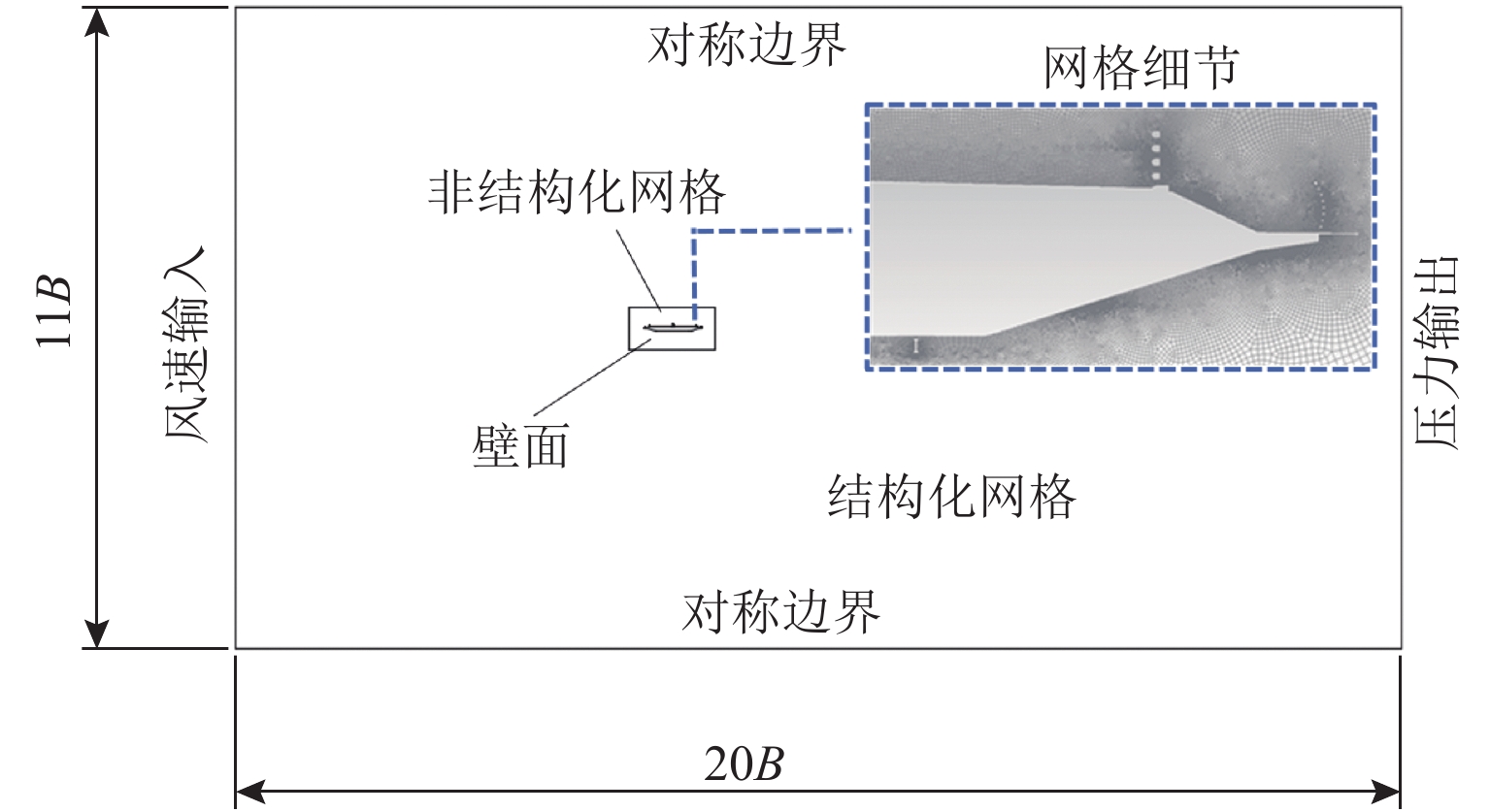
度/%时间步长 算法 取值 0.08 0.5 0.00002 SIMPLE 计算域设置如图7所示,计算域总尺寸为
11B×20B (B为原设计断面模型宽度). 其中内层采用非结构化四边形网格,底层网格厚度设为0.02 mm,外层采用结构化四边形网格,网格总数为40万~50万,各断面的y+ 值均小于6,其中y+为流体在近壁面区域处的无量纲壁面距离.涡激振动是气流绕经结构时周期性漩涡脱落的频率与结构某阶固有频率一致所引发的共振现象,漩涡结构及其脱落模式对涡振的发生起决定性作用.
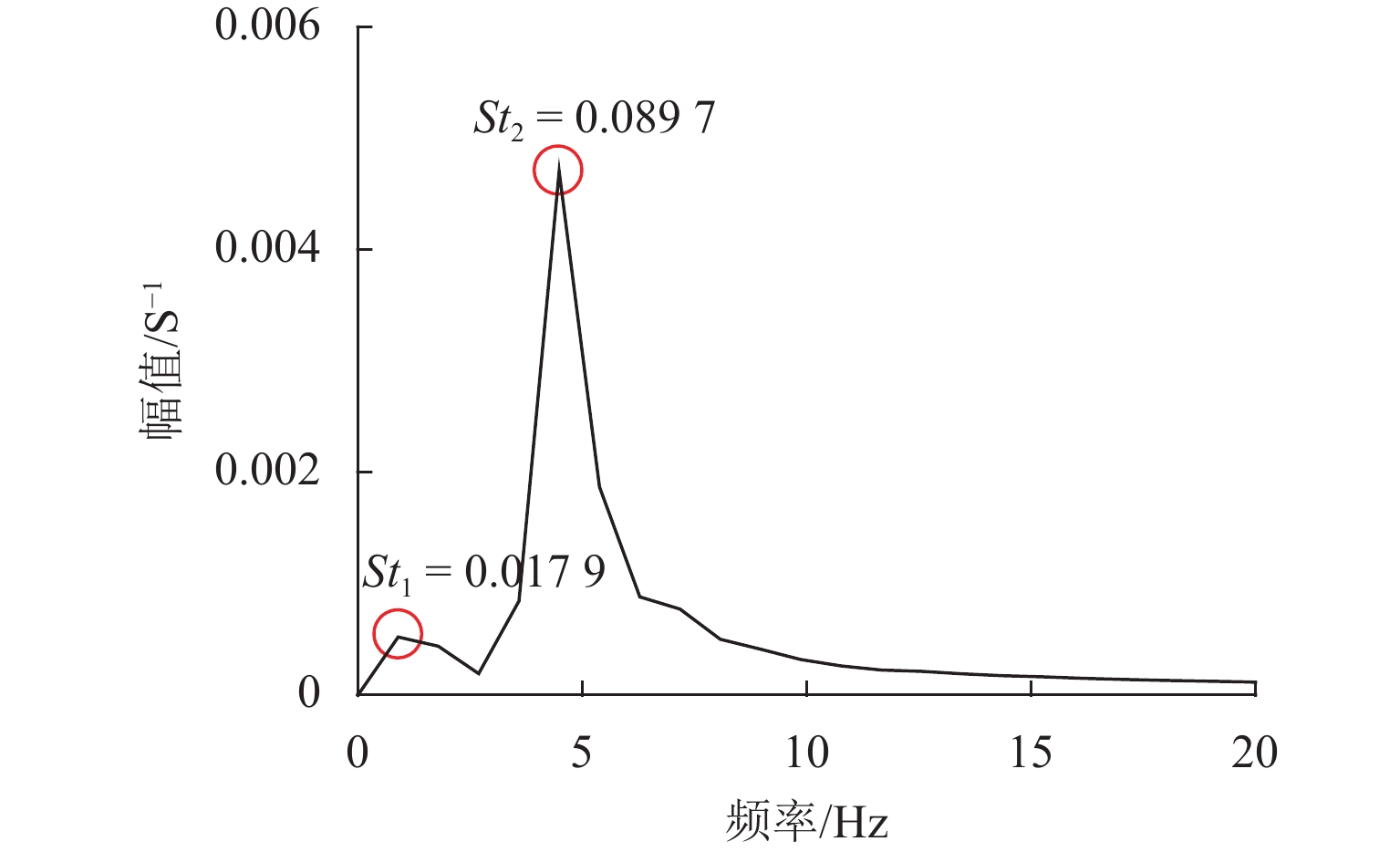
图8为1/19位置工况断面(原设计宽体扁平箱梁断面)在4 m/s计算风速下的气动升力
CL(t) 的频谱图,频谱图中共存在2个卓越频率,分别是0.897 Hz与4.486 Hz. 通过前文风洞试验得到原设计扁平箱梁在 +5° 风攻角下竖弯涡振起振风速V1为4.9 m/s(该起振风速下风洞实测湍流度为0.698%),由此可计算得到V1对应的St(V1),其中St为断面在各起振风速下对应计算得到的斯托洛哈数;幅值较小的卓越频率(0.897 Hz)下对应的斯托洛哈数 St1 为0.0179;而幅值较大且占主导作用的卓越频率(4.486 Hz)下对应的斯托洛哈数 St2 为0.0897, St2 与通过风洞试验得到的 St(V1) 相比,误差在8.9%,由此表明本文的模拟结果可较准确地再现测试断面的漩涡脱落与发展情况. 图 8 1/19位置工况断面
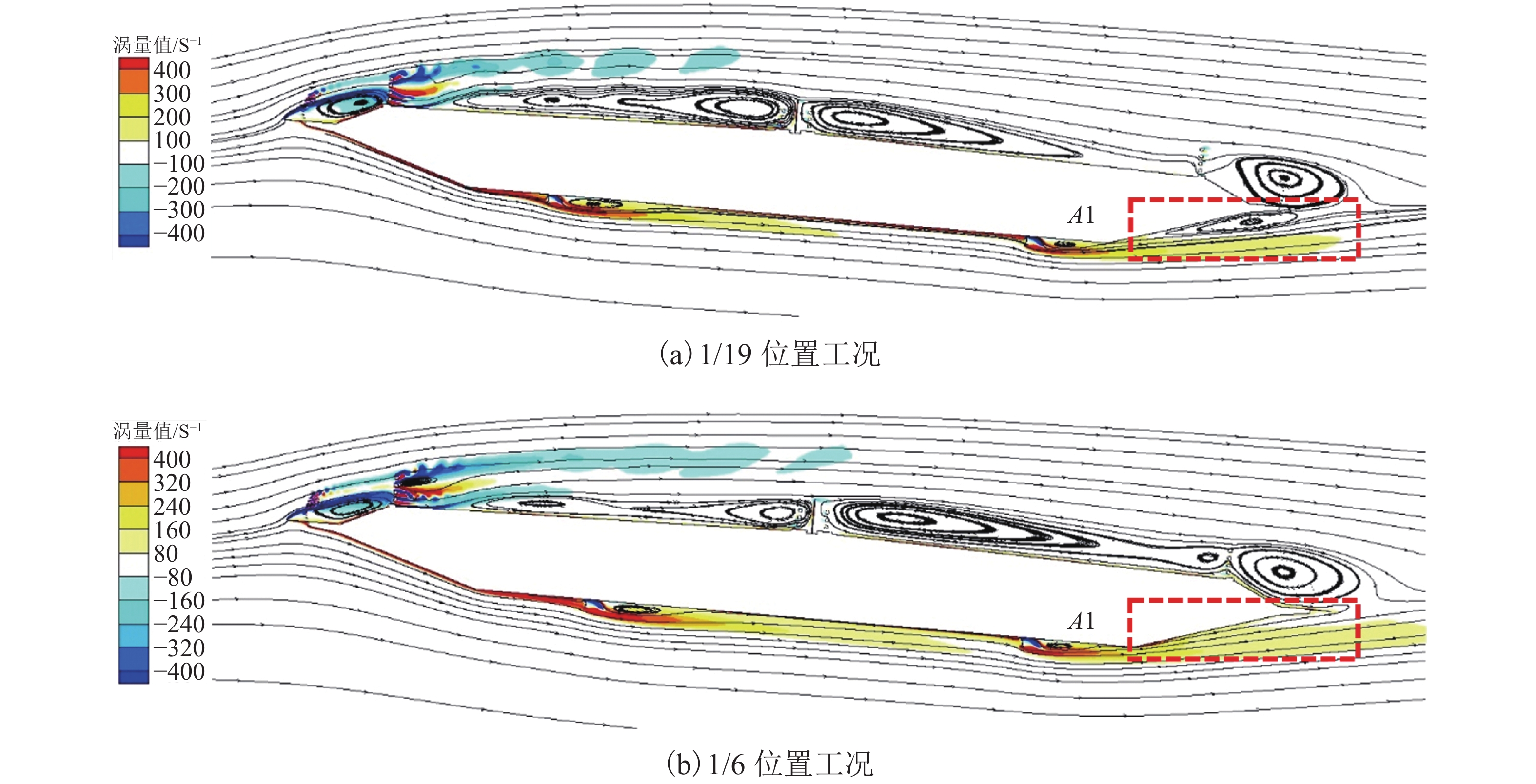
图 8 1/19位置工况断面CL(t) 频谱Figure 8.CL(t) spectrum of section with maintenance rail on the 1/19 position计算风速下1/19与1/6位置工况断面的涡量与迹线图如图9所示,可以发现:在1/19位置计算工况中,断面下游斜腹板A1处存在一个尺寸较大的漩涡,该漩涡为0.35倍梁高,0.12倍梁宽,将检修车轨道向主梁中部移动至1/6位置工况后,断面A1处的漩涡被完全消除.
 图 9 检修车轨道各位置工况断面涡量与迹线图Figure 9. Vorticity magnitude and trace diagram around the section with different maintenance rail positions
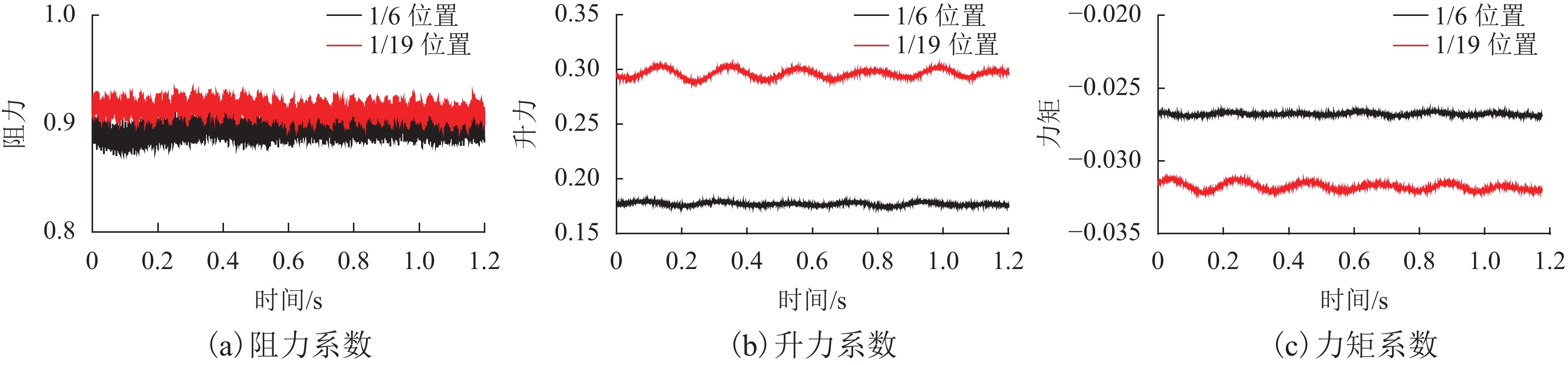
图 9 检修车轨道各位置工况断面涡量与迹线图Figure 9. Vorticity magnitude and trace diagram around the section with different maintenance rail positions通过数值模拟得到计算断面的三分力系数时程图如图10所示. 由图10可知:1/19位置工况断面的三分力系数中对涡振有较大影响的升力系数与力矩系数随时间的变化均呈近正弦曲线,梁体受到的卓越周期性涡激力只有一个;1/19位置工况断面的升力系数变化范围为0.2885~0.3043,幅值为0.0079,力矩系数变化范围为−0.03122~−0.03222,幅值达到0.001;通过计算得到的1/6位置工况断面的升力系数变化幅值降至0.0026,降幅为67.1%,力矩系数幅值降至0.00019,降幅为81.0%,两者的降幅均达到65.0%以上. 验证了增大检修车轨道与主梁底板边缘之间距离能够显著抑制扁平箱梁涡激振动的风洞试验结果. 结合涡量与迹线图可以发现,漩涡尺寸与能量较大,且大幅降低主要发生在断面下游斜腹板处,因此,增大检修车轨道与主梁底板边缘之间的距离能够有效消除该处的尾流漩涡,是该措施能够显著抑制甚至消除宽体扁平箱梁涡激振动的主要原因之一.
 图 10 数值模拟静力三分力时程图Figure 10. Time-history diagram of the static coefficients in numerical simulation
图 10 数值模拟静力三分力时程图Figure 10. Time-history diagram of the static coefficients in numerical simulation3. 导流板制振性能及制振机理研究
增大检修车轨道与主梁底部边缘的距离可有效提高主梁的涡振性能,但考虑到实际中检修车稳定性的需要,检修车轨道位置不宜太过远离主梁底部边缘,故在距离梁底部边缘
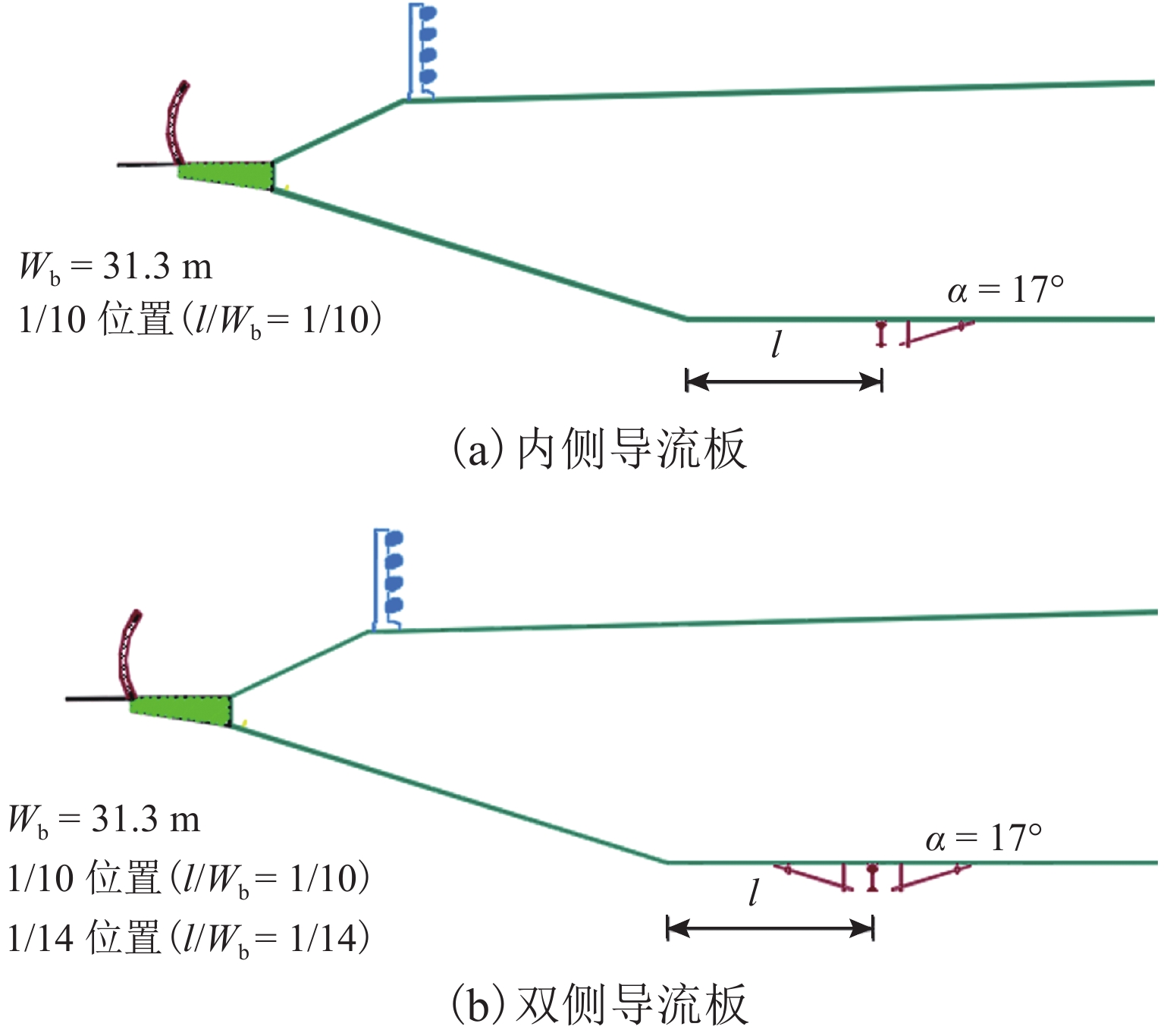
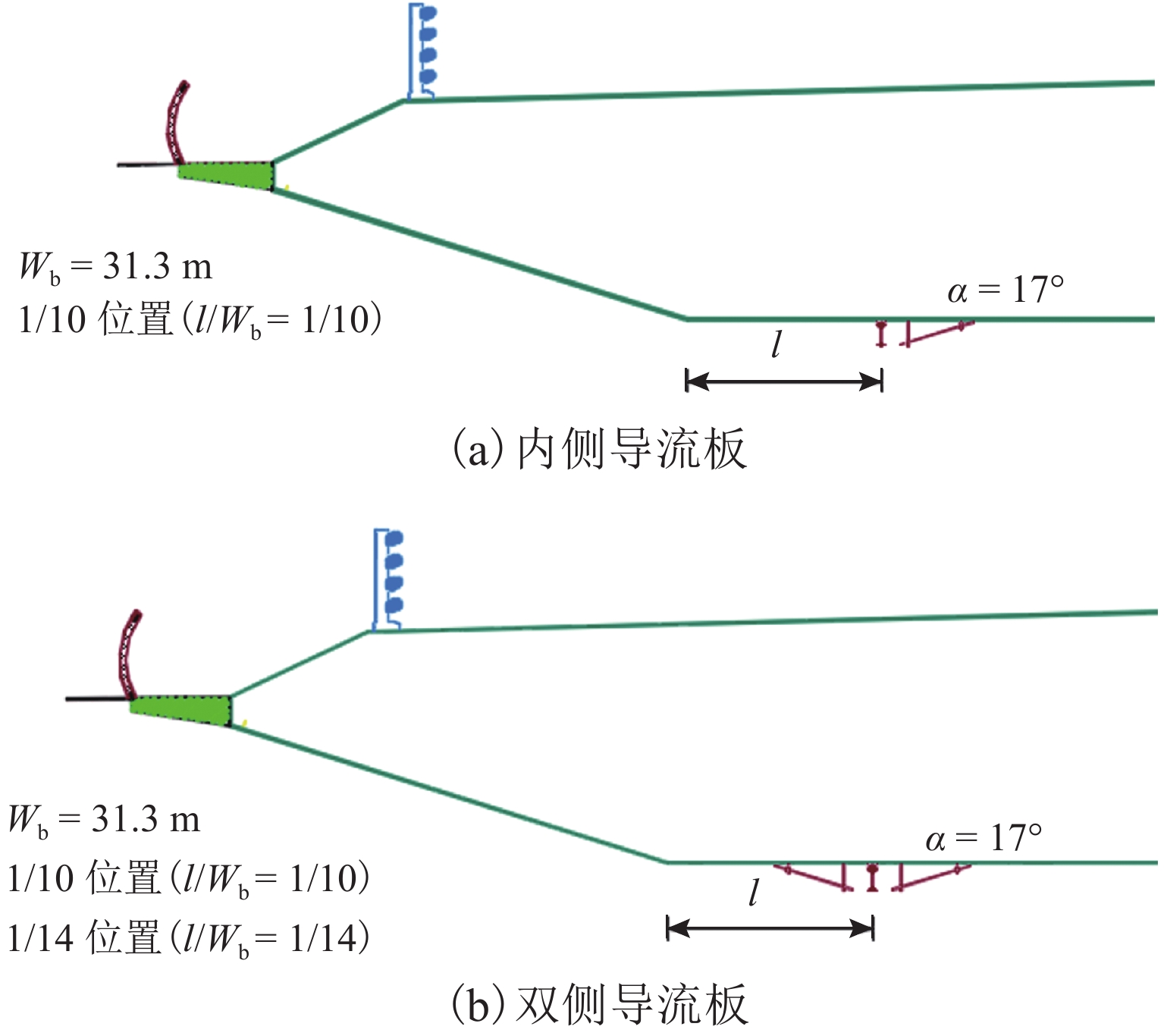
l=Wb/10 与l=Wb/14 处的检修车轨道附近设置导流板,用以考察导流板对宽体扁平箱梁断面涡激振动的抑制作用.3.1 导流板制振效果
分别在
l=Wb/10 处的检修车轨道内侧与双侧布置17° 倾角导流板,并在l=Wb/14 处的检修车轨道双侧布置相同倾角导流板(具体如图11所示),并据此开展了1∶25节段模型涡振试验用以考察导流板的涡振制振作用. 试验在0.24%竖弯阻尼比与0.10%扭转阻尼比下进行,各工况在0°、±3° 和 ±5° 风攻角下的最大涡振振幅如表4所示(表中数据均已换算成实桥).表 4 各导流板工况涡振幅值Table 4. VIV displacement of each working condition with different guide vanes风攻角/(°) 竖弯涡振振幅/mm 扭转涡振振幅/(°) 1/14 位置双
侧导流板1/10 位置双
侧导流板1/10 位置内
侧导流板1/10 位置
无导流板1/14 位置双
侧导流板1/10 位置双
侧导流板1/10 位置内
侧导流板1/10 位置
无导流板0 38.4 5.3 5.5 5.3 0.37 0.01 0.01 0.55 +3 6.9 6.4 6.3 6.4 0.02 0.01 0.02 0.02 +5 12.2 8.3 7.5 6.8 0.45 0.02 0.02 0.45 −3 5.9 8.4 8.6 7.5 0.02 0.01 0.01 0.02 −5 7.3 8.8 8.7 7.9 0.02 0.01 0.01 0.03 由表4可知:在
l=Wb/14 处的检修车轨道两侧布置导流板后,梁体仍存在显著的涡激振动现象;在l=Wb/10 处的检修车轨道内侧或双侧布置导流板则能在各风攻角下完全消除主梁原本存在的扭转涡激振动,且不会影响梁体原本的竖向涡振性能.综上可知,在检修车轨道处设置导流板可以显著提高宽体扁平箱梁的涡振性能,且内侧导流板与双侧导流板的制振效果相同. 当
l⩾Wb/10 时,布置导流板可完全消除宽体扁平箱梁的涡激振动.3.2 设置导流板后的扰流特性及制振机理探讨
研究表明,在内侧导流板的基础上增设外侧导流板对1/10位置工况下的宽体扁平箱梁断面涡振性能并不会造成显著影响,该工况下内侧导流板与双侧导流板的制振效果相同. 为了研究导流板的制振机理并探究该试验现象的原因,分别对
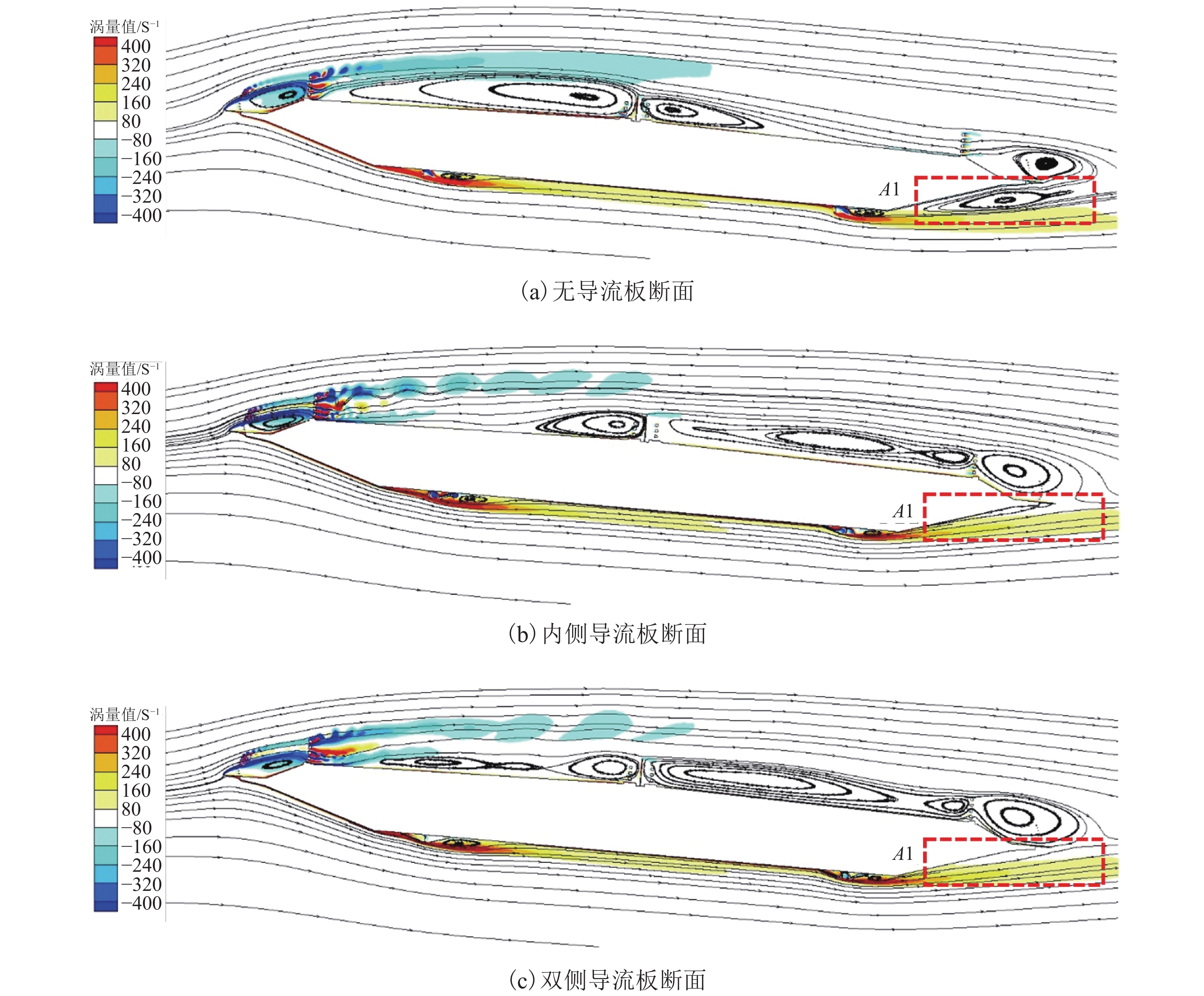
l=Wb/10 处时的无导流板断面、加装内侧导流板断面与加装双侧导流板断面在静止状态下的非定常绕流进行仿真模拟,计算断面如图12所示.计算风速下无导流板断面的涡量与迹线图如图13(a)所示,可以发现,断面下游斜腹板A1处存在一个尺寸较大的漩涡,该漩涡为0.33倍梁高,0.13倍梁宽.
 图 13 各导流板工况断面涡量与迹线图Figure 13. Vorticity magnitude and trace diagram around the section with different guide vanes
图 13 各导流板工况断面涡量与迹线图Figure 13. Vorticity magnitude and trace diagram around the section with different guide vanes加装内侧导流板断面与双侧导流板断面的涡量与迹线图分别如图13(b)、(c)所示,在检修车轨道处设置双侧导流板或内侧导流板后,断面A1处的漩涡均被完全消除,印证了设置内侧或双侧导流板均能显著抑制宽体扁平箱梁涡激振动且制振效果相同的风洞试验结果. 在检修车轨道处设置的双侧导流板中,内侧导流板是起到改善断面涡振性能并抑制梁体涡振的主要措施.
结合检修车轨道位置对宽体扁平箱梁断面涡振性能的影响机理分析可以发现:增大检修车轨道与主梁底板边缘之间距离以及设置导流板均能够显著提高宽体扁平箱梁涡振性能,且两种制振措施的制振机理相同,均是通过消除断面下游斜腹板处的尾流漩涡,减小尾流涡脱所带来的周期性涡激力,从而达到抑制梁体涡激振动的作用.
4. 全桥气弹模型风洞试验
全桥气弹模型的动力特性、气动外形以及试验流场较节段模型可以更真实地反映三维空间效应和多模态耦合效应[25,29]. 因此以检修车轨道位于
l=Wb/10 处且布置内侧导流板的断面为主梁截面进行全桥气弹模型风洞试验,用以验证气动措施的有效性.全桥气弹模型风洞试验在西南交通大学大型低速风洞(XNJD-3)中进行,该风洞为回流式风洞,试验段截面尺寸为22.5 m(宽) × 4.5 m(高) × 36.0 m(长). 考虑到桥长以及风洞试验段的尺寸,全桥气弹模型采用1∶134的几何缩尺比,风速比为1∶11.58,模型由主梁、桥塔、大缆、吊索以及支座等构成(如图14所示),具体试验参数如表5所示.
表 5 全桥气弹模型试验参数取值Table 5. Full bridge aeroelastic model test parameters参数名称 实桥值 相似比 模型值 主梁长/m 1666 1/134 12.43 梁宽/m 49.7 1/134 0.371 梁高/m 4 1/134 0.030 单位长度质量/(kg•m−1) 32496 1/1342 1.8098 单位长度质量惯性矩/
(kg•m2•m−1)5722181 1/1344 0.0177 为了检验模型的结构动力特性是否与原型计算值之间满足相似关系,对该全桥气弹模型竖向、扭转和侧向3个方向上的基频进行了检验,测试结果如表6所示,结果表明模型频率实测值与要求值相比,除了一阶正对称竖弯频率误差略微偏离要求值之外,其他模态频率均与模型要求频率保持较好的一致性,且阻尼比均控制在0.40%以内,因此可以认为该气弹模型的动力特性满足要求,可代表原结构的风致动力行为.
表 6 全桥气弹模型模态参数Table 6. Modal testing parameters of full bridge aeroelastic model振型 实桥频率/Hz 模型频率 阻尼比/% 要求值/Hz 实测值/Hz 误差/% V-S-1 0.1010 1.169 1.092 5.70 0.34 V-A-1 0.0960 1.112 1.121 1.10 0.32 T-S-1 0.2196 2.542 2.569 2.30 0.34 T-A-1 0.2263 2.62 2.6321 1.80 0.40 L-S-1 0.0564 0.661 0.6601 1.50 0.23 L-A-1 0.1345 1.557 1.5622 1.50 0.28 全桥气弹模型风洞试验在均匀流中进行,分别测试了全桥模型在0° 与±3° 风攻角下的涡振响应. 试验结果表明,在试验风速0~2.2 m/s(对应实桥风速0~25 m/s)范围内,全桥模型均未发生涡激振动现象. 验证了
l=Wb/10 处且布置内侧导流板对该桥涡振性能的优化作用.5. 结 论
基于本文涉及的节段模型风洞试验和数值模拟结果,得出主要结论如下:
1) 在0.24%竖弯阻尼比与0.10%扭转阻尼比条件下,原设计宽体扁平钢箱梁断面存在显著涡激振动,且超过抗风规范限值.
2) 增大检修车轨道与主梁底板边缘之间距离能够显著抑制宽体扁平钢箱梁涡振振幅,当
l⩾Wb/6 时,可在不同风攻角下完全消除宽体扁平箱梁断面的涡激振动.3) 在检修车轨道处设置17° 倾角导流板可以显著提高宽体扁平箱梁的涡振性能,且内侧导流板与双侧导流板的制振效果相同. 当
l⩾Wb/10 时,布置导流板可完全消除梁体的涡激振动.4) CFD数值模拟结果表明,在检修车轨道处设置导流板以及增大检修车轨道与主梁底板边缘之间距离这两种措施均能有效消除宽体扁平箱梁断面下游斜腹板处的尾流漩涡,进而起到制振的作用.
-
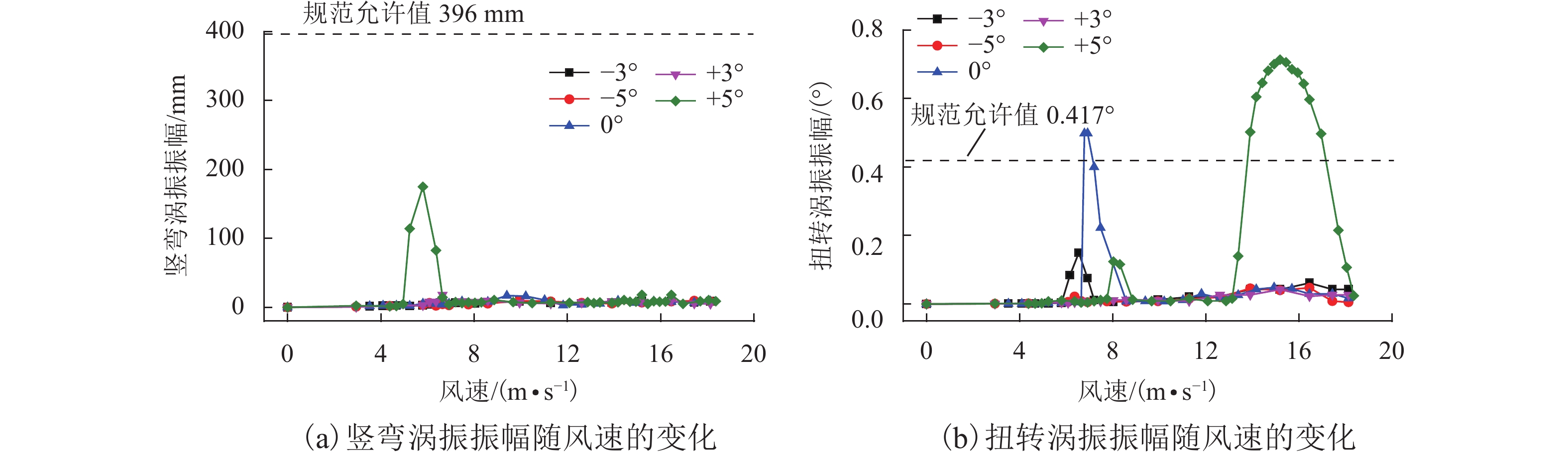
图 4 原设计断面主梁涡振响应
Figure 4. Vortex-induced vibration displacement of the original section
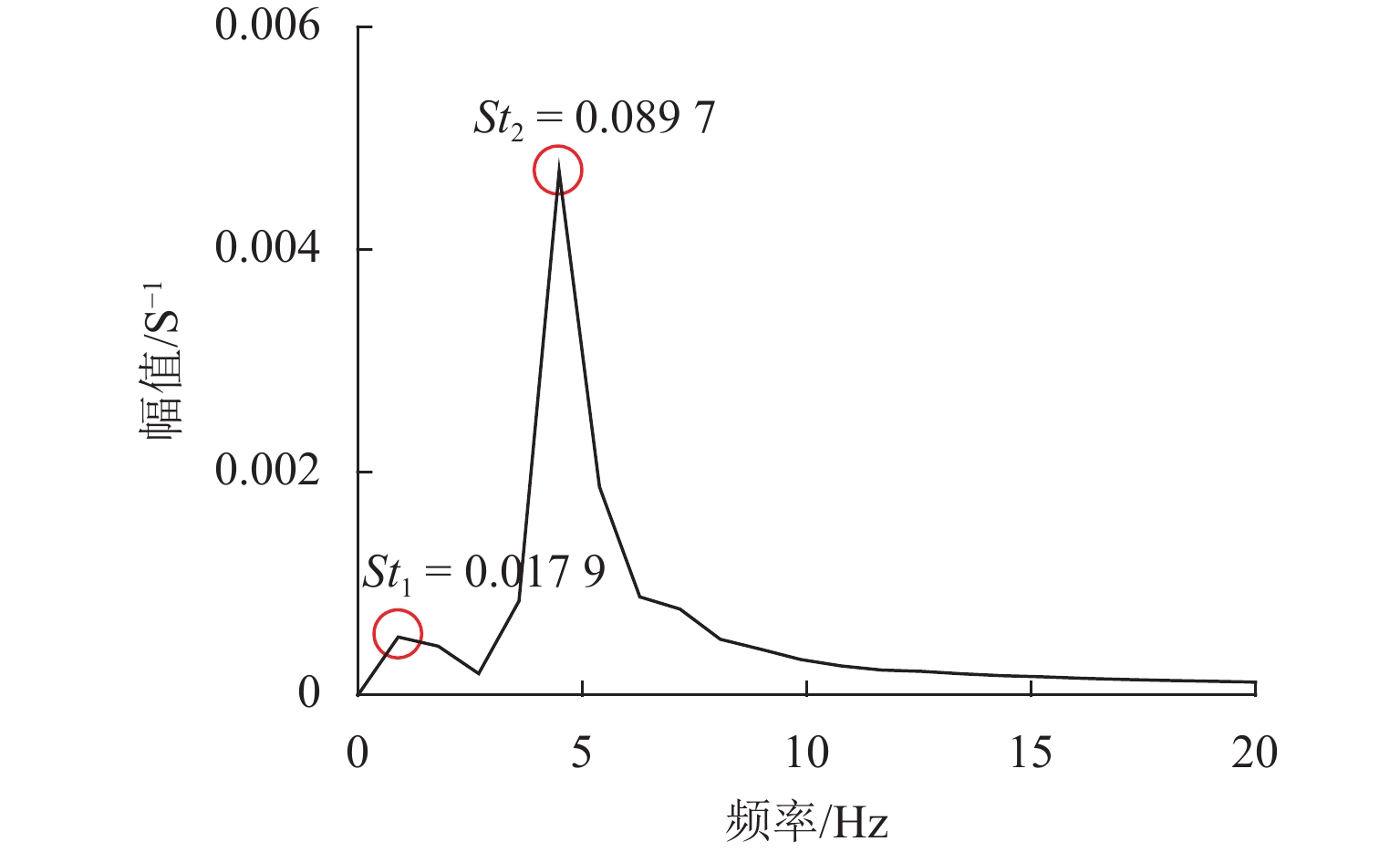
图 8 1/19位置工况断面
CL(t) 频谱Figure 8.
CL(t) spectrum of section with maintenance rail on the 1/19 position
图 9 检修车轨道各位置工况断面涡量与迹线图
Figure 9. Vorticity magnitude and trace diagram around the section with different maintenance rail positions

图 10 数值模拟静力三分力时程图
Figure 10. Time-history diagram of the static coefficients in numerical simulation

图 13 各导流板工况断面涡量与迹线图
Figure 13. Vorticity magnitude and trace diagram around the section with different guide vanes
表 1 节段模型试验参数取值
Table 1. Section model test parameters
参数名称 实桥值 相似比 模型值 等效质量/(kg•m−1) 42156 1/252 67.45 等效质量惯性矩/
(kg•m2•m−1)10007344 1/254 25.62 竖弯频率/Hz 0.101 13.960 1.410 扭转频率/Hz 0.220 10.500 2.310 竖弯阻尼比/% 0.30 — 0.24 扭转阻尼比/% 0.30 — 0.10  下载: 导出CSV
下载: 导出CSV
表 2 检修车轨道各位置工况涡振幅值
Table 2. VIV displacement of each working condition with different maintenance rail positions
风攻角/(°) 竖弯涡振振幅/mm 扭转涡振振幅/(°) 1/6 位置 1/8 位置 1/10 位置 1/19 位置 1/6 位置 1/8 位置 1/10 位置 1/19 位置 0 6.4 7.0 5.3 17.1 0.01 0.07 0.55 0.50 +3 6.9 7.9 6.4 18.1 0.02 0.01 0.02 0.04 +5 7.9 7.6 6.8 174.9 0.02 0.02 0.45 0.71 −3 6.5 7.7 7.5 8.5 0.01 0.21 0.02 0.15 −5 7.2 8.5 7.9 9.7 0.02 0.02 0.03 0.05
下载: 导出CSV
表 3 数值模拟参数设置
Table 3. Parameters of the numerical simulation
参数 湍流长度
尺度/m湍流强
度/%时间步长 算法 取值 0.08 0.5 0.00002 SIMPLE
下载: 导出CSV
表 4 各导流板工况涡振幅值
Table 4. VIV displacement of each working condition with different guide vanes
风攻角/(°) 竖弯涡振振幅/mm 扭转涡振振幅/(°) 1/14 位置双
侧导流板1/10 位置双
侧导流板1/10 位置内
侧导流板1/10 位置
无导流板1/14 位置双
侧导流板1/10 位置双
侧导流板1/10 位置内
侧导流板1/10 位置
无导流板0 38.4 5.3 5.5 5.3 0.37 0.01 0.01 0.55 +3 6.9 6.4 6.3 6.4 0.02 0.01 0.02 0.02 +5 12.2 8.3 7.5 6.8 0.45 0.02 0.02 0.45 −3 5.9 8.4 8.6 7.5 0.02 0.01 0.01 0.02 −5 7.3 8.8 8.7 7.9 0.02 0.01 0.01 0.03
下载: 导出CSV
表 5 全桥气弹模型试验参数取值
Table 5. Full bridge aeroelastic model test parameters
参数名称 实桥值 相似比 模型值 主梁长/m 1666 1/134 12.43 梁宽/m 49.7 1/134 0.371 梁高/m 4 1/134 0.030 单位长度质量/(kg•m−1) 32496 1/1342 1.8098 单位长度质量惯性矩/
(kg•m2•m−1)5722181 1/1344 0.0177
下载: 导出CSV
表 6 全桥气弹模型模态参数
Table 6. Modal testing parameters of full bridge aeroelastic model
振型 实桥频率/Hz 模型频率 阻尼比/% 要求值/Hz 实测值/Hz 误差/% V-S-1 0.1010 1.169 1.092 5.70 0.34 V-A-1 0.0960 1.112 1.121 1.10 0.32 T-S-1 0.2196 2.542 2.569 2.30 0.34 T-A-1 0.2263 2.62 2.6321 1.80 0.40 L-S-1 0.0564 0.661 0.6601 1.50 0.23 L-A-1 0.1345 1.557 1.5622 1.50 0.28
下载: 导出CSV
-
[1] 政清. 桥梁风工程[M]. 北京: 人民交通出版社, 2005. [2] 管青海,李加武,胡兆同,等. 栏杆对典型桥梁断面涡激振动的影响研究[J]. 振动与冲击,2014,33(3): 150-156. doi: 10.3969/j.issn.1000-3835.2014.03.029GUAN Qinghai, LI Jiawu, HU Zhaotong, et al. Effects of railings on vortex-induced vibration of a bridge deck section[J]. Journal of Vibration and Shock, 2014, 33(3): 150-156. doi: 10.3969/j.issn.1000-3835.2014.03.029 [3] 李春光,陈政清,韩阳. 带悬挑人行道板流线型箱梁涡振性能研究[J]. 振动与冲击,2014,33(24): 19-25. doi: 10.13465/j.cnki.jvs.2014.24.004LI Chunguang, CHEN Zhengqing, HAN Yang. Vortex induced vibration performance of a streamlined box girder with a cantilevered walking slab[J]. Journal of Vibration and Shock, 2014, 33(24): 19-25. doi: 10.13465/j.cnki.jvs.2014.24.004 [4] 杨阳,张亮亮,吴波,等. 宽体扁平钢箱梁气动力特性及涡振性能研究[J]. 桥梁建设,2016,46(1): 70-75.YANG Yang, ZHANG Liangliang, WU Bo, et al. Study of aerodynamic characteristics and vortex-induced vibration performance of wide flat steel box girder[J]. Bridge Construction, 2016, 46(1): 70-75. [5] LARSEN A, WALL A. Shaping of bridge box girders to avoid vortex shedding response[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2012, 104/105/106: 159-165. [6] LARSEN A, ESDAHL S, ANDERSEN J E, et al. Storebælt suspension bridge-vortex shedding excitation and mitigation by guide vanes[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2000, 88(2/3): 283-296. [7] NAGAO F, UTSUNOMIYA H, YOSHIOKA E, et al. Effects of handrails on separated shear flow and vortex-induced oscillation[J]. Journal of Wind Engineering and Industrial Aerodynamics, 1997, 69/70/71: 819-827. [8] CHEN Z S, LIU S M, YU X F, et al. Experimental investigations on VIV of bridge deck sections: a case study[J]. KSCE Journal of Civil Engineering, 2017, 21(7): 2821-2827. doi: 10.1007/s12205-017-0120-1 [9] ZHAN J, XIN D B, OU J P, et al. Experimental study on suppressing vortex-induced vibration of a long-span bridge by installing the wavy railings[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2020, 202(8): 104205.1-104205.13. [10] 李浩弘,吴波,张亮亮,等. 基于风洞试验及大涡模拟的宽体扁平箱梁涡振特性研究与优化[J]. 建筑结构学报,2018,39(增1): 29-35. doi: 10.14006/j.jzjgxb.2018.S1.005LI Haohong, WU Bo, ZHANG Liangliang, et al. Investigation and optimization on VIV performances of wide flat box girders based on wind tunnel tests and large eddy simulations[J]. Journal of Building Structures, 2018, 39(S1): 29-35. doi: 10.14006/j.jzjgxb.2018.S1.005 [11] 张建,郑史雄,唐煜,等. 基于节段模型试验的悬索桥涡振性能优化研究[J]. 实验流体力学,2015,29(2): 48-54. doi: 10.11729/syltlx20140037ZHANG Jian, ZHENG Shixiong, TANG Yu, et al. Research on optimizing vortex-induced vibration performance for suspension bridge based on section model test[J]. Journal of Experiments in Fluid Mechanics, 2015, 29(2): 48-54. doi: 10.11729/syltlx20140037 [12] 刘君,廖海黎,万嘉伟,等. 检修车轨道导流板对流线型箱梁涡振的影响[J]. 西南交通大学学报,2015,50(5): 789-795. doi: 10.3969/j.issn.0258-2724.2015.05.004LIU Jun, LIAO Haili, WAN Jiawei, et al. Effect of guide vane beside maintenance rail on vortex-induced vibration of streamlined box girder[J]. Journal of Southwest Jiaotong University, 2015, 50(5): 789-795. doi: 10.3969/j.issn.0258-2724.2015.05.004 [13] 李明,孙延国,李明水,等. 宽幅流线型箱梁涡振性能及制振措施研究[J]. 西南交通大学学报,2018,53(4): 712-719. doi: 10.3969/j.issn.0258-2724.2018.04.007LI Ming, SUN Yanguo, LI Mingshui, et al. Vortex-induced vibration performance of wide streamlined box girder and aerodynamic countermeasure research[J]. Journal of Southwest Jiaotong University, 2018, 53(4): 712-719. doi: 10.3969/j.issn.0258-2724.2018.04.007 [14] LI M, SUN Y G, JING H M, et al. Vortex-induced vibration optimization of a wide streamline box girder by wind tunnel test[J]. KSCE Journal of Civil Engineering, 2018, 22(12): 5143-5153. doi: 10.1007/s12205-018-0548-y [15] 朱思宇,李永乐,申俊昕,等. 大攻角来流作用下扁平钢箱梁涡振性能风洞试验优化研究[J]. 土木工程学报,2015,48(2): 79-86. doi: 10.15951/j.tmgcxb.2015.02.012ZHU Siyu, LI Yongle, SHEN Junxin, et al. Optimization of vortex-induced vibration of flat steel box girders at large attack angle by wind tunnel test[J]. China Civil Engineering Journal, 2015, 48(2): 79-86. doi: 10.15951/j.tmgcxb.2015.02.012 [16] 孙延国,廖海黎,李明水. 基于节段模型试验的悬索桥涡振抑振措施[J]. 西南交通大学学报,2012,47(2): 218-223,264. doi: 10.3969/j.issn.0258-2724.2012.02.008SUN Yanguo, LIAO Haili, LI Mingshui. Mitigation measures of vortex-induced vibration of suspension bridge based on section model test[J]. Journal of Southwest Jiaotong University, 2012, 47(2): 218-223,264. doi: 10.3969/j.issn.0258-2724.2012.02.008 [17] 胡传新,赵林,周志勇,等. 流线型闭口箱梁抑流板抑制涡振机理研究[J]. 振动工程学报,2020,33(1): 1-11. doi: 10.16385/j.cnki.issn.1004-4523.2020.01.001HU Chuanxin, ZHAO Lin, ZHOU Zhiyong, et al. Suppressing mechanism of spoilers on vortex-induced vibrations around a streamlined closed-box girder based on characteristics of aerodynamics forces and flow field[J]. Journal of Vibration Engineering, 2020, 33(1): 1-11. doi: 10.16385/j.cnki.issn.1004-4523.2020.01.001 [18] HU C X, ZHAO L, GE Y J. Mechanism of suppression of vortex-induced vibrations of a streamlined closed-box girder using additional small-scale components[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2019, 189: 314-331. doi: 10.1016/j.jweia.2019.04.015 [19] SCHEWE G, LARSEN A. Reynolds number effects in the flow around a bluff bridge deck cross section[J]. Journal of Wind Engineering and Industrial Aerodynamics, 1998, 74/75/76: 829-838. [20] SCHEWE G. Reynolds-number effects in flow around more-or-less bluff bodies[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2001, 89(14/15): 1267-1289. [21] 胡传新,赵林,陈海兴,等. 流线闭口箱梁涡振气动力的雷诺数效应研究[J]. 振动与冲击,2019,38(12): 118-125. doi: 10.13465/j.cnki.jvs.2019.12.017HU Chuanxin, ZHAO Lin, CHEN Haixing, et al. Reynolds number effects on aerodynamic forces of a streamlined closed-box girder during vortex-induced vibrations[J]. Journal of Vibration and Shock, 2019, 38(12): 118-125. doi: 10.13465/j.cnki.jvs.2019.12.017 [22] SCANLAN R H. Observations on low-speed aeroelasticity[J]. Journal of Engineering Mechanics, 2002, 128(12): 1254-1258. doi: 10.1061/(ASCE)0733-9399(2002)128:12(1254) [23] 李加武,张宏杰,韩万水. 斜拉桥风致响应的雷诺数效应[J]. 中国公路学报,2009,22(2): 42-47. doi: 10.3321/j.issn:1001-7372.2009.02.008LI Jiawu, ZHANG Hongjie, HAN Wanshui. Wind-induced response of cable-stayed bridge with consideration of Reynolds number effect[J]. China Journal of Highway and Transport, 2009, 22(2): 42-47. doi: 10.3321/j.issn:1001-7372.2009.02.008 [24] 熊龙,孙延国,廖海黎. 钢箱梁在高低雷诺数下的涡振特性研究[J]. 桥梁建设,2016,46(5): 65-70.XIONG Long, SUN Yanguo, LIAO Haili. Study of vortex-induced vibration characteristics of steel box girder at high and low Reynolds numbers[J]. Bridge Construction, 2016, 46(5): 65-70. [25] 董浩天,葛耀君,杨詠昕. 闭口钢箱梁悬索桥涡振多尺度模型风洞试验[J]. 结构工程师,2018,34(4): 94-100. doi: 10.3969/j.issn.1005-0159.2018.04.014DONG Haotian, GE Yaojun, YANG Yongxin. Multi-scale model tests of vortex-induced vibration of a suspension bridge with closed steel box girders[J]. Structural Engineers, 2018, 34(4): 94-100. doi: 10.3969/j.issn.1005-0159.2018.04.014 [26] 任若松,梁新华,刘小兵,等. 准流线型桥梁断面气动力特性的雷诺数效应研究[J]. 工程力学,2020,37(增1): 139-144,167.REN Ruosong, LIANG Xinhua, LIU Xiaobing, et al. Study on Reynolds number effect of aerodynamic characteristics of quasi-streamlined bridge section[J]. Engineering Mechanics, 2020, 37(S1): 139-144,167. [27] 交通运输部. 公路桥梁抗风设计规范: JTG/T 3360-01—2018[S]. 北京: 人民交通出版社, 2018. [28] MENTER F R. Two-equation eddy-viscosity turbulence models for engineering applications[J]. AIAA Journal, 1994, 32(8): 1598-1605. doi: 10.2514/3.12149 [29] 熊龙,廖海黎,李明水,等. 马普托桥颤振稳定性的风洞试验研究[J]. 防灾减灾工程学报,2017,37(2): 321-326. doi: 10.13409/j.cnki.jdpme.2017.02.021XIONG Long, LIAO Haili, LI Mingshui, et al. Wind tunnel test study on flutter stability of Maputo bridge[J]. Journal of Disaster Prevention and Mitigation Engineering, 2017, 37(2): 321-326. doi: 10.13409/j.cnki.jdpme.2017.02.021 期刊类型引用(3)
1. 张艺,李欢,魏高翔,何旭辉,谢祖育. 高铁大跨扁平箱梁桥涡振性能及抑振措施研究. 中南大学学报(自然科学版). 2025(02): 560-574 .  百度学术
百度学术2. 段青松,马存明. 检修车轨道对窄幅流线型箱梁涡振性能影响研究. 桥梁建设. 2024(01): 88-94 . 百度学术3. 《中国公路学报》编辑部. 中国桥梁工程学术研究综述·2024. 中国公路学报. 2024(12): 1-160 . 百度学术其他类型引用(5)
-








 下载:
下载:
























 下载:
下载:






 百度学术
百度学术
 点击查看大图
点击查看大图

计量
- 文章访问数: 432
- HTML全文浏览量: 193
- PDF下载量: 33
- 被引次数: 8