

Suspension Parameters Optimum Matching of High-Speed Locomotive Based on Frequency Domain Stationarity
-
摘要:
为合理优化匹配悬挂参数以提升高速机车动力学性能,针对某高速机车,采用虚拟激励法计算频域横向平稳性指标,提出了考虑频域横向平稳性和稳定性多目标性能的关键悬挂参数多参数协同优化方法;分别以2种抗蛇行减振器布置方式和3种轮轨接触状态运行工况为例,验证了该方法对机车横向动力学性能的提升效果. 结果表明:低轮轨接触锥度工况机车一次蛇行稳定性较差,尤其采用抗蛇行减振器斜对称布置方式,机车后司机室横向平稳性显著变差;对于低锥度工况,需以提高机车稳定性为优化目标,而高锥度工况则更需关注其横向平稳性;为兼顾不同轮轨接触条件下机车动力学性能,以提高线路适应性,机车一系纵向刚度、抗蛇行减振器阻尼和二系横向减振器阻尼值在文中给定的优化范围内应尽量选取较小值,建议分别选取12 kN/mm、600 kN·s/m和25 kN·s/m.
Abstract:In order to reasonably optimize and match the suspension parameters to improve the dynamic performance of high-speed locomotives, the pseudo-excitation method was used to calculate the lateral riding quality index in the frequency domain for a high-speed locomotive, and a collaborative multi-parameter optimization method for the key suspension parameters was proposed considering the multi-objective performance of lateral riding quality in the frequency domain and lateral stability. Taking the operational scenarios as examples in which two yaw damper layouts and three wheel-rail contact conditions were considered, the improvement effect of this method on the lateral dynamic performance of the locomotive was illustrated. The results show that the primary hunting stability of the locomotive is poor in the low equivalent conicity condition. The lateral riding quality of the rear cab is significantly deteriorated, especially when the skewed symmetrical arrangement of the yaw damper is adopted. For the case of low equivalent conicity, it's necessary to regard improving locomotive lateral stability as the optimization objective, while for the case of high equivalent conicity, more attention should be paid to lateral riding quality. In order to give consideration to the dynamic performance of the locomotive under different wheel-rail contact states, thus improving the adaptability to track lines, the values of primary longitudinal stiffness, yaw damper damping and secondary lateral damping should be designed as small as possible in the given optimization range, it is recommended to choose them as 12 kN/mm, 600 kN·s/m, and 25 kN·s/m, respectively.
-
悬挂参数优化是机车车辆动力学性能设计的重要环节,是保障列车稳定、安全和平顺运行的重要措施. 近年来,广泛研究利用主动或半主动控制以及新型悬挂元件可以有效提升并实现兼顾车辆横向稳定性和曲线通过等动力学性能[1-5],但仍因其成本和可靠性问题并未进行广泛的应用. 针对传统的被动悬挂参数进行系统优化仍是提升机车车辆动力学性能的有效方法. 机车车辆横向动力学性能包括直线稳定性、平稳性和曲线通过性能,传统的悬挂参数优化工作较多体现在依赖丰富的工程设计经验通过多次单参数优化以选取具有矛盾对立性的动力学性能指标,如直线稳定性与曲线通过能、车体平稳性与悬挂元件挠度等等,兼顾各方面性能、折衷选取合适的悬挂参数. 近年来,随着运行速度提高和轻量化设计,高速机车在实际运用中出现了低轮轨接触等效锥度导致的低频晃车现象和高锥度引起的高频抖车现象,两种状态下对横向稳定性的不同要求导致在悬挂设计时参数出现一定矛盾性,需要折衷选取合适的参数[6]. 另外,机车车辆动力学性能受多个悬挂参数的影响,在悬挂参数优化设计时需要考虑到各参数之间的协同优化匹配[7].
近年来,多参数多目标优化方法开始应用到机车车辆的悬挂参数设计中[8-14],采用如遗传和粒子群等优化算法实现对多个悬挂参数的同时迭代运算,自动朝着多个指定的动力学性能指标进行优化,然后分析人员可以从优化结果中人为选取需要的目标性能指标及其对应的悬挂参数,采用该方法可以系统地实现悬挂参数优化和车辆系统动态性能设计,减少传统优化设计方法对车辆系统动力学分析经验的依赖.
1. 频域平稳性与虚拟激励法
1.1 动力学模型
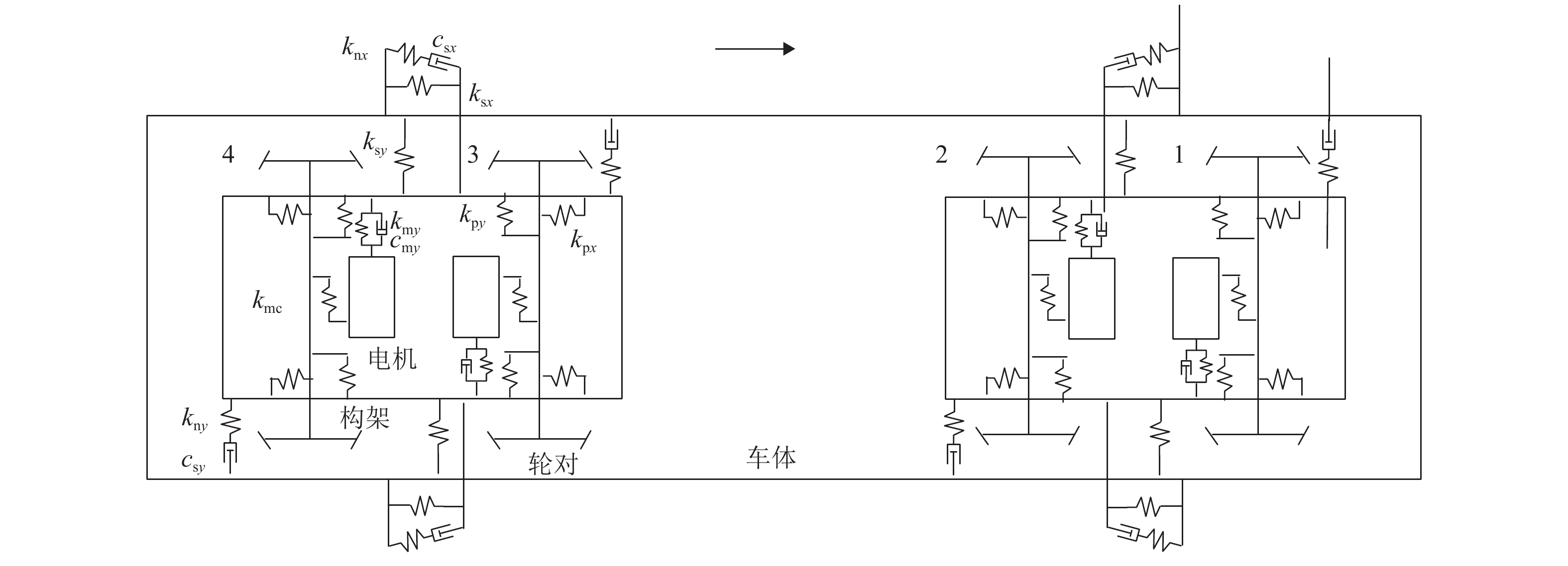
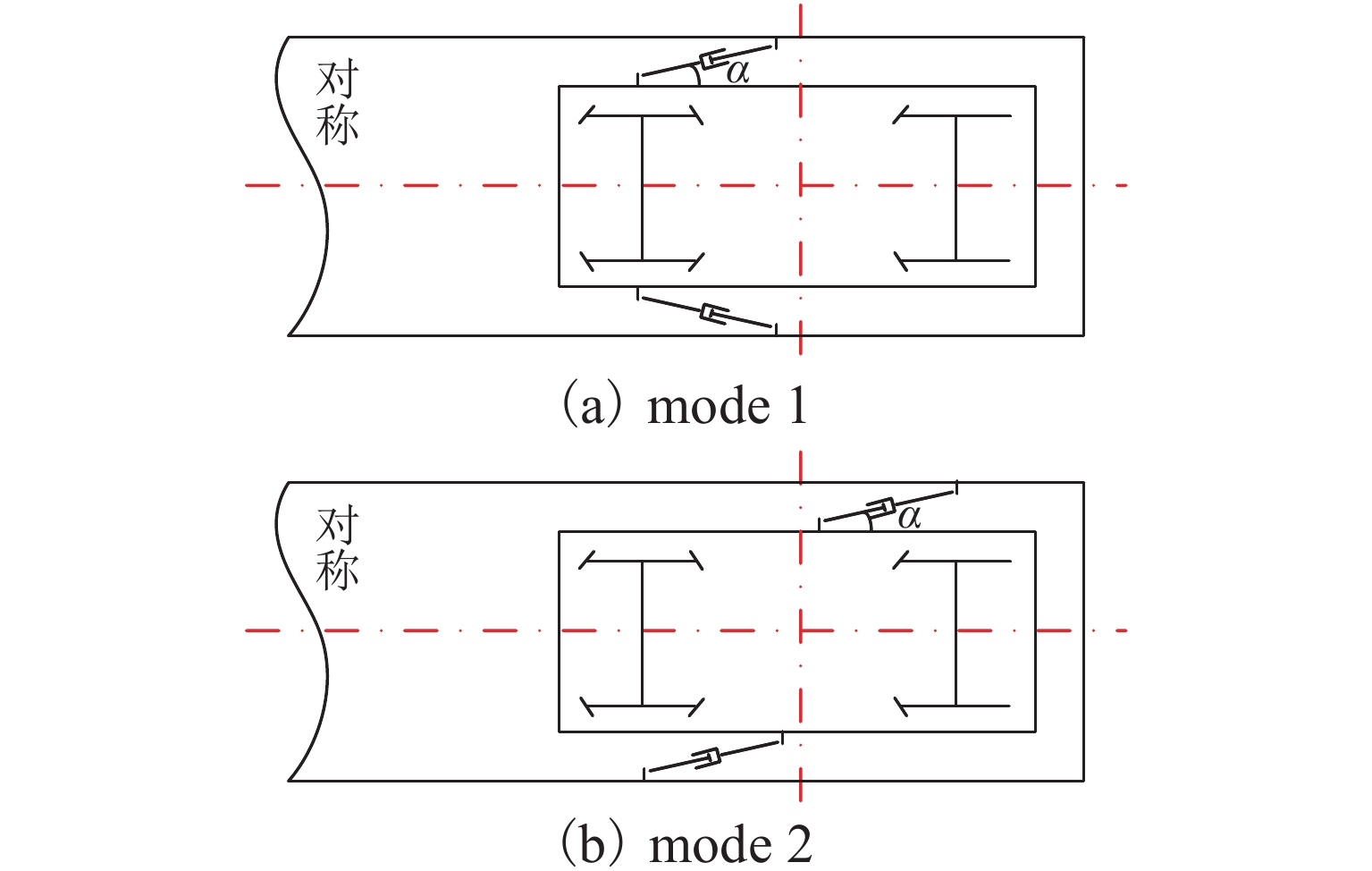
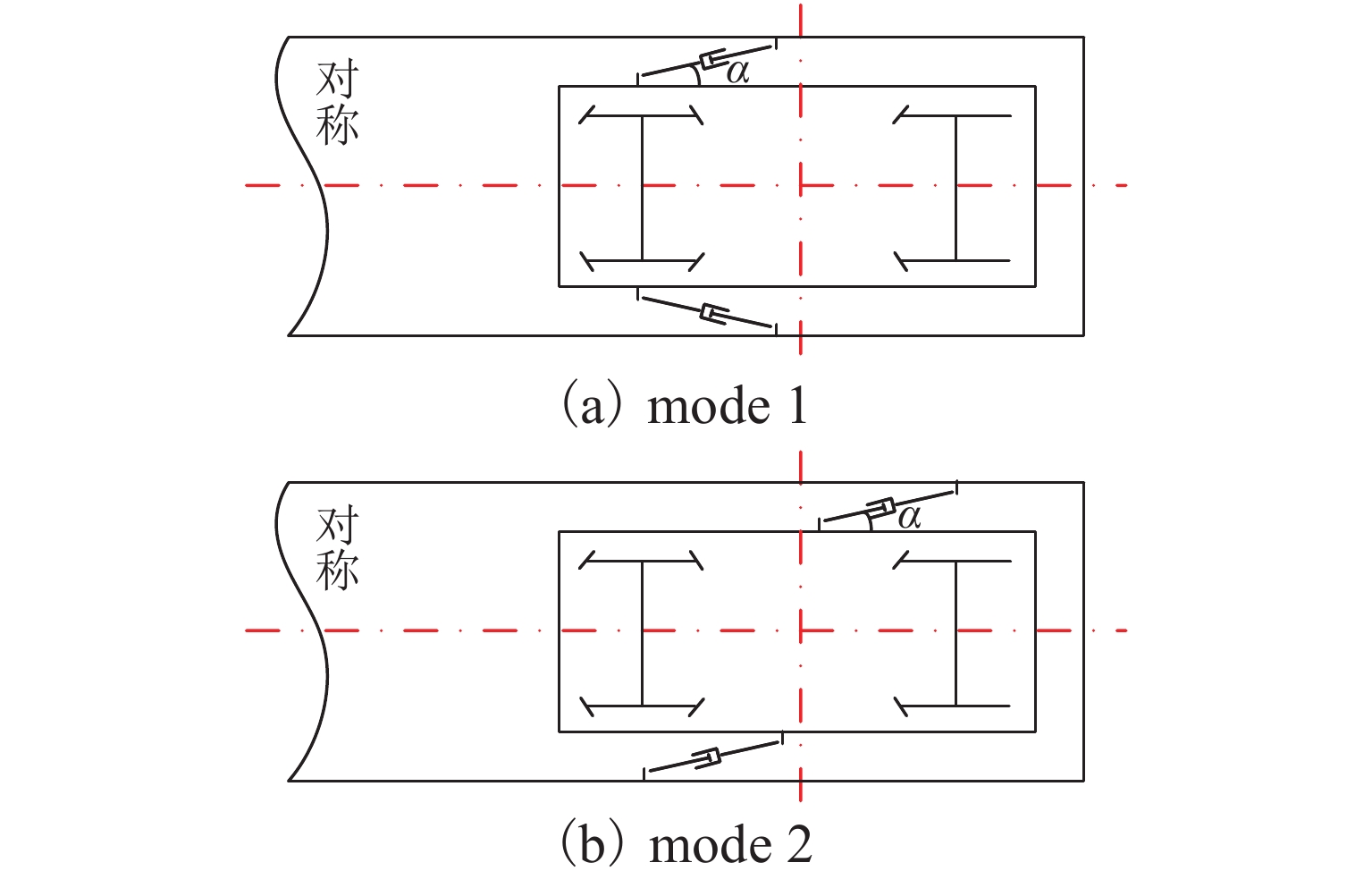
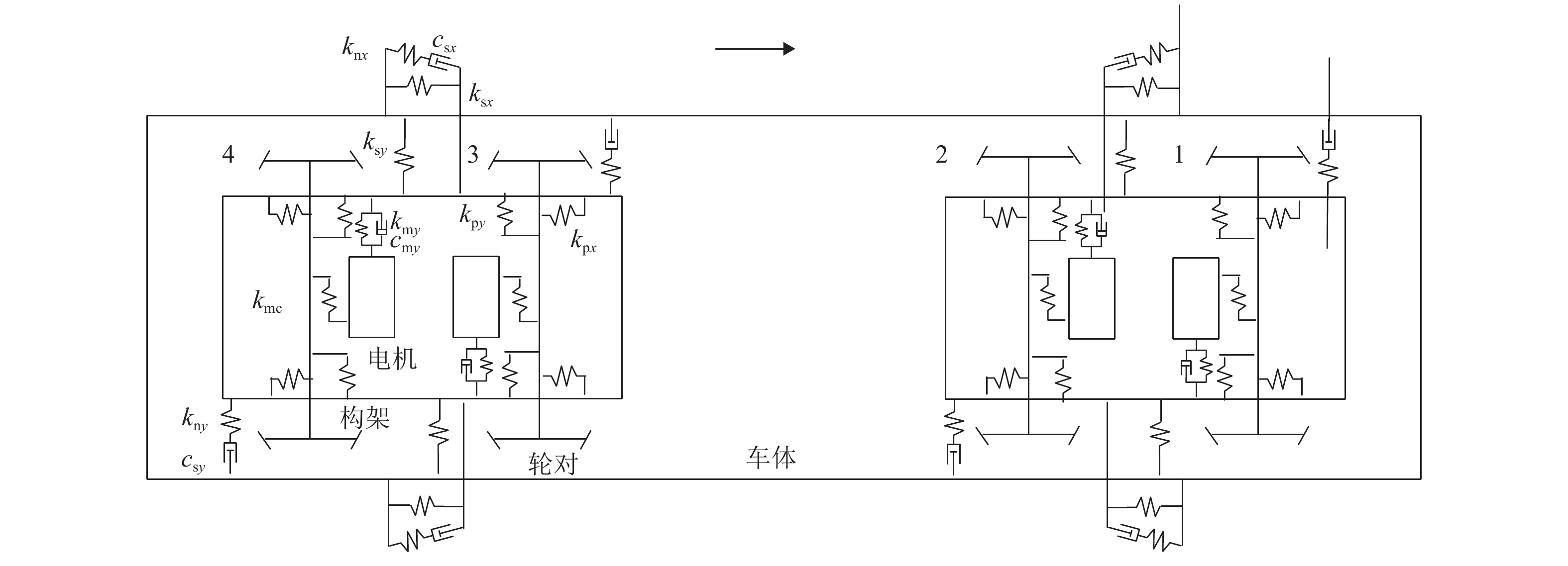
根据国内某时速160 km的高速机车结构参数建立如图1所示的机车横向动力学模型,图中: kpy、 kpx分别为轮对与构架之间一系悬挂横向、纵向定位刚度; ksy、 ksx (csy、 csx)分别为车体与构架之间设有的横向、纵向二系悬挂刚度(阻尼) ; kny、 knx (csy、 csx) 分别为抗蛇行减振器和二系横向减振器刚度(阻尼 );kmy、 cmy 分别为电机弹性架刚度和阻尼 ;kmc为联轴器横向刚度 ;其余主要结构参数见表1. 该模型包括1个车体、2个构架、4个轮对、4个横向弹性悬挂电机,共11个刚体. 车体和构架具有横向、摇头和侧滚自由度;轮对具有横向和摇头自由度;电机具有横向自由度. 同时根据当前高速机车实际结构,考虑到了两种不同的抗蛇行减振器布置方式及其与车体纵向中心线的安装角度α,如图2中mode 1和mode 2所示:mode 1 表示两侧抗蛇行减振器与转向架连接端靠近构架近车体中心的端部,称之为同侧内置;mode 2表示两侧抗蛇行减振器与转向架连接端靠近构架中心斜对称布置在构架两侧,称之为斜对称布置.
表 1 模型部分参数Table 1. Partial parameters of model参数 符号 数值 速度 V/(km·h−1) 160 新轮轨接触等效锥度 λ 0.1 轴重 Ld/t 19.5 轴距 b/m 2.8 车辆定距 l/m 10.2 车体质量 mc/t 42 转向架质量 mb/t 18 电机质量 md/t 3.5 转向架单侧二系横向刚度 ksy/(kN·mm−1) 0.24 本文针对机车进行线性稳定性和基于线性系统随机振动响应的频域平稳性分析,动力学模型采用线性结构参数,轮轨接触几何采用等效锥度来表示,轮轨切向力采用Kalker线性理论计算,机车动力学模型为
M¨y+C˙y+Ky=Qf(t), (1) 式中:y为系统的自由度矢量;M、C、K、Q分别为系统的质量、阻尼、刚度、激励矩阵;f(t)为激励向量,t为时间.
采用复模态计算方法,将式(1)整理成状态空间形式进行线性系统稳定性分析. 系统矩阵的每一对共轭复特征根实部与模之比为负值时表示稳定模态,其负值对应该模态的阻尼比ζ,ζ为正时表明该线性系统是稳定性. 当系统只要存在实部为正数的特征根,表明该系统不稳定. 对于轨道车辆系统,与运行速度相关的振动模态称之为蛇行模态,通常低频的蛇行模态决定了系统稳定性. 本文选取较小值作为优化方向,故定义ζ为负值时系统为稳定状态,蛇行模态最大阻尼比ζmax决定了系统的稳定性,定义ζmax为系统线性稳定性指标.
1.2 频域平稳性
平稳性指标是度量机车悬挂系统性能的一项重要指标,较为常用的Sperling指标为
W=0.896×10√n∑i=1A3iF(fi)fi, (2) 式中:Ai为频率fi下的振动加速度最大值(cm/s2),fi为第i级振动频率(Hz);F(fi)为频率加权系数.
对于实际列车运行过程连续的随机振动信号,可以采用频域法计算平稳性指标W. 频域法平稳性计算公式是对Sperling公式的一种改进运算,如式(3).
W=C16.67√2∫f0G1(f)B21df, (3) 式中:f为功率谱函数的频率值;G1(f)为加速度时间历程样本的功率谱密度函数;C1对于横向平稳性计算取0.83;B1为频率加权函数[15].
本文通过虚拟激励法求得车体横向振动在随机轨道不平顺的频响函数,再利用频响函数求得机车相关部分的虚拟位移响应及相应的功率谱密度,并代入式(3)计算车体平稳性指标. 频域平稳性指标计算因不需对动力学模型进行时域仿真而具有计算速度快的优点,有利于后文对机车悬挂参数的多目标多参数优化分析.
1.3 虚拟激励法
随机振动响应的分析过程中,传统的CQC (complete-quadratic-combination)、SRSS (square-root-sum-square)方法计算量庞大,且精度无法得到充分保证. 虚拟激励法是近年由我国学者提出用于结构系统随机振动分析新方法,它以简谐振动代替平稳随机振动过程,以逐步积分代替了非平稳随机振动,将复杂的随机响应分解为这两种形式的耦合,从而通过较为简单的方法以及显著减少的计算量来高效解决平稳及非平稳随机振动响应的问题[16]. 假定线性时不变系统受到的外界激励为x(t),其自谱密度为Sxx,根据随机振动理论的公式可知响应的自谱密度为
Syy=|H(ω)|2Sxx, (4) 式中:H(ω)为频响函数.
当以简谐激励x(t) = eiωt作为外界激励时,其响应y = H(ω)eiωt,对比式(4),可以在简谐激励x(t)中加入系数
√Sxx ,即构造虚拟激励˜x(t)=√Sxxeiωt, (5) 则其响应为
˜y(t)=√SxxH(ω)eiωt, (6) 进一步运算可得
˜y∗(t)˜y(t)=Sxx|H(ω)|2=Syy, (7) 式中:
˜y∗(t) 为虚拟响应˜y(t) 的共轭变量.由于随机振动理论核心公式可以方便地在自谱与互谱直接转换,因此可以通过虚拟激励法快速灵活地得到所需的功率谱.
对于机车模型而言,轮对与轨道存在n个接触点,这些接触点仅有时延上的差别,激励向量为
f(t)=[a1Fr(t−t1)a2Fr(t−t2)⋮ajFr(t−tj)], (8) 式中:aj (j=1,2,…,n)为激励强度的常数;Fr为激励函数;tj为各点激励的时延.
已知轨道不平顺的自谱密度为SFF,则构造的简谐激励为
x(t)=√SFFeiωt. (9) 进一步构造的虚拟激励为
˜f(t)=[a1e−iωt1a2e−iωt2⋮aje−iωtn]√SFFeiωt. (10) 将虚拟激励代入式(1)后,得到虚拟位移响应为
˜y=(−ω2M+iωC+K)−1Q[a1e−iωt1a2e−iωt2⋮aje−iωtn]√SFFeiωt. (11) 根据式(7)可得虚拟位移响应的自功率谱为
Syy=˜y∗˜yT. (12) 近年来,在轮轨交通系统动力学领域有较多文献利用虚拟激励法进行车、线、桥和隧道系统的垂向随机振动和动态载荷等研究[17-18],但在车辆系统横向动力学领域还未见报道. 本文采用德国高干扰轨道谱作为轨道轨向不平顺激励,根据虚拟激励法对机车横向动力学系统计算虚拟位移响应及虚拟加速度响应,从而得到机车前、后司机室横向平稳性指标Wf和Wb,并依此作为高速机车横向动力学性能指标对机车悬挂参数优化匹配进行研究.
2. 悬挂参数多目标优化
2.1 多目标优化方法
多目标优化区别于单目标优化问题,对于单目标优化能够寻找到确定的一个或一组最优解,使目标达到最优值,而多目标优化的理想情况是令所有目标达到最优值,但就一个整体的系统来说,这种情况难以实现,因此需要选择能够同时兼顾多个目标的折中方案. 多目标优化问题通常存在着一个解集,称为Pareto最优解,其在目标函数空间中的像被称为Pareto前沿. Pareto前沿为优化后的目标值,每个点都具有其他点所不具有的优势,可以从中寻找规律,根据设计侧重点的不同,可以人为在Pareto集中选取满足性能要求的优化解. NSGA-Ⅱ算法(non-dominated sorting genetic algorithm-Ⅱ)能够保持类群的多样性,提高计算效率,是目前解决多目标优化问题常用的一类有效的算法[19]. 本文选用带有精英策略的快速非支配排序遗传算法NSGA-Ⅱ进行多目标优化设计. 针对机车横向动力学性能进行优化,以ζmax和Wf、Wb为优化目标. 优化问题可表示为
min{Wf,Wb,ζmax} .根据现有机车实际结构参数,其二系水平刚度调整范围有限. 本文针对机车直线平稳性和稳定性进行优化设计,因此针对该优化问题选取kpx、kpy、csx、csy、抗蛇行减振器串联刚度kncsx以及α作为优化参数,根据实际机车较为常用的悬挂参数取值,具体的优化范围见表2.
表 2 悬挂参数优化范围Table 2. Optimization range of suspension parameters参数 优化范围 kpx/ (kN·mm−1) 12 ~ 100 kpy/ (kN·mm−1) 2 ~ 8 csx/ (kN·s·m−1) 300 ~ 2000 csy/ (kN·s·m−1) 10 ~ 60 kncsx/(kN·mm−1) 10 ~ 25 α/(°) 0 ~ 10 2.2 多目标优化结果
以国内某型高速机车为研究对象,对以上6个悬挂参数进行多目标多参数优化,通过不断迭代和更新悬挂参数以获取针对优化目标更佳的机车动力学性能,得到关于此多目标优化问题的Pareto前沿和Pareto参数集. 图3为两种抗蛇行减振器布置方式(mode 1和mode 2)对应的Pareto优化目标前沿. 基于机车在实际运用过程中出现的因较小轮轨接触锥度引起的低频晃车问题和因较高轮轨接触锥度引起的高频抖车问题,分别选取等效锥度λ为0.05、0.30和0.60 的情况进行分析及对机车动力学性能优化. 图中: Wf、Wb数值越小代表平稳性越好,图中点颜色越深表示机车横向稳定性指标ζmax值越小,表明系统越稳定.
由图3可知:1) 当λ ≥ 0.30的高锥度工况时,在给定悬挂参数优化范围内通过遗传算法优化,两种抗蛇行布置方案机车的可实现ζmax可达 −0.34;λ =0.05低锥度工况时,可实现最优的ζmax为 −0.15,表示机车在低锥度下稳定性较差;针对mode 2在低锥度工况, Wb要显著劣于Wf,高锥度工况则不存在该现象;对于mode 1,3种锥度工况可实现的Wb与Wf相当,与两种抗蛇行减振器布置方式的机车在实际运用过程中的表现一致. 由此证明了抗蛇行减振器布置方式是形成该两款机车前后横向平稳性差异的主要原因,也验证了所建机车横向动力学模型的合理性.
2) 对于低锥度工况,两种抗蛇行布置方案对应车体横向平稳性与机车稳定性的相关性要显著强于高锥度工况计算结果, ζmax = −0.30时,其车体横向平稳性反而明显劣于ζmax = −0.15时的结果. 因此,对于低锥度工况,为了保证能迅速衰减机车横向振动,需要提高蛇行模态阻尼比,机车动力学性能设计更需要关注其横向稳定性;而对于高锥度工况,机车蛇行模态阻尼比在满足一定条件时更需关注其横向平稳性.
根据计算结果,对于3种轮轨接触等效锥度工况,选取ζmax<−0.15,Wb和Wf同时小于2.5作为符合机车动力学性能的条件,对应于图3中红色圆圈部分,根据该范围可以提取对应的悬挂参数,从而分析相应锥度工况机车最优悬挂参数的优化匹配规律.
2.3 最优悬挂参数分布
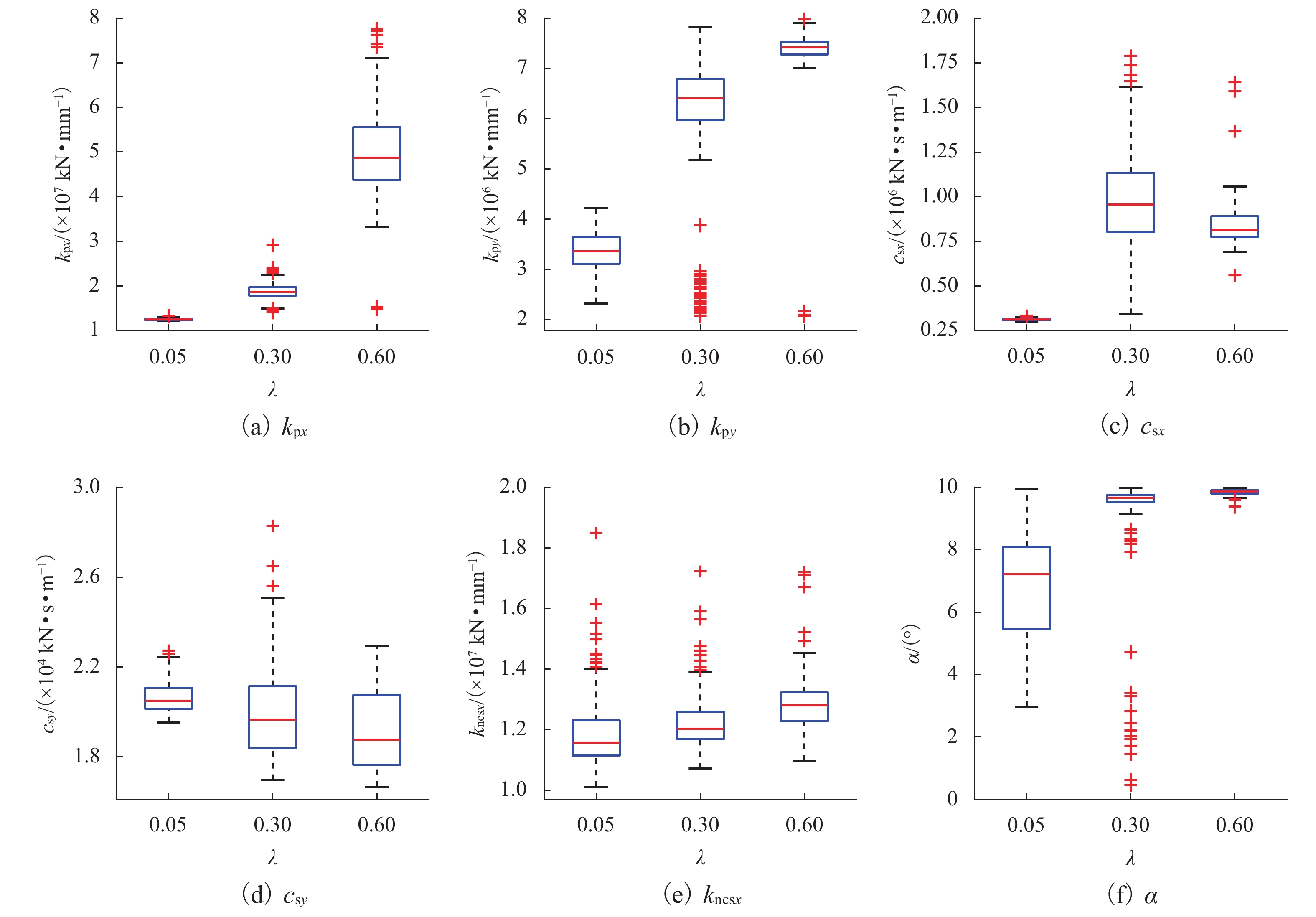
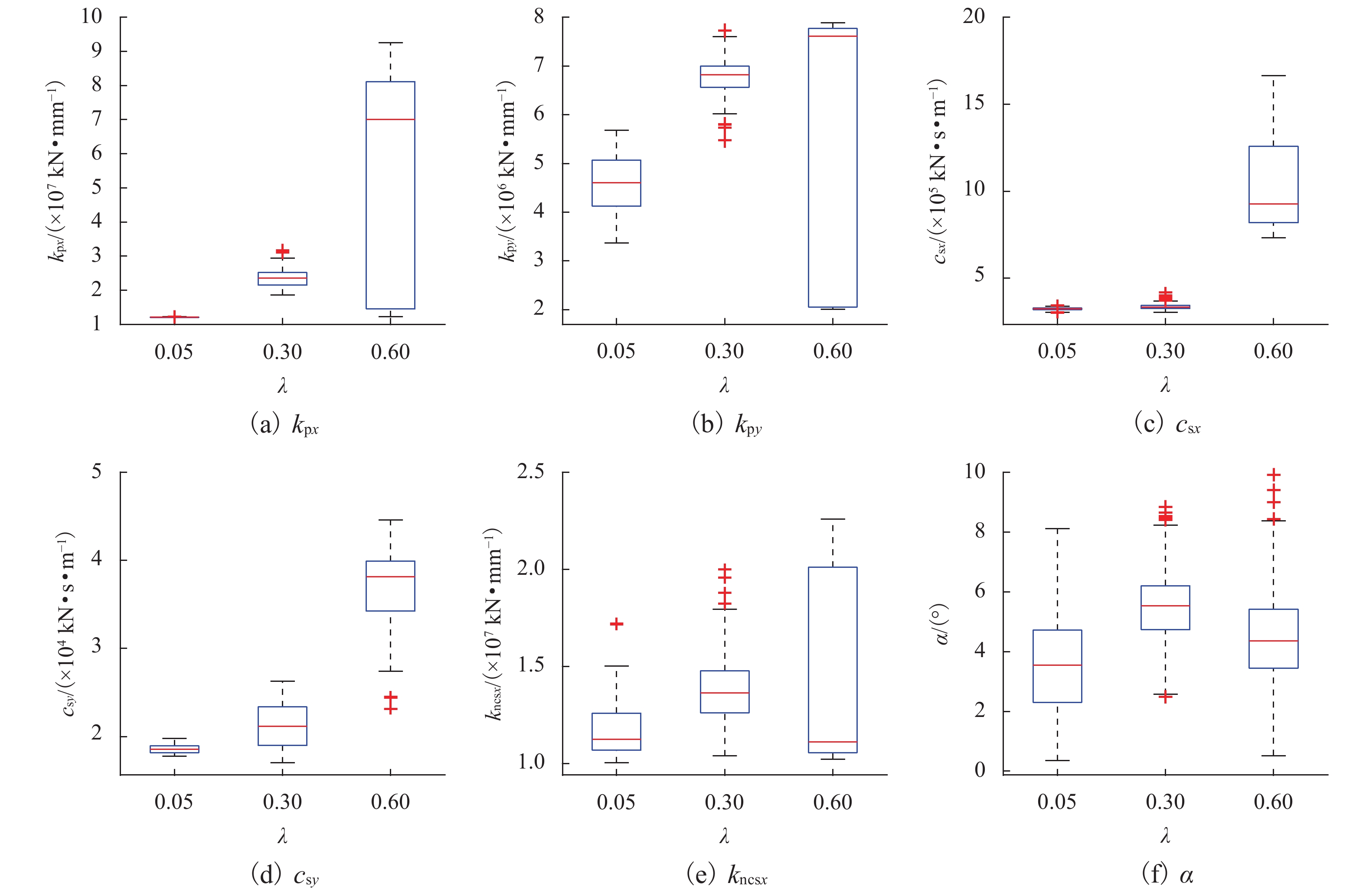
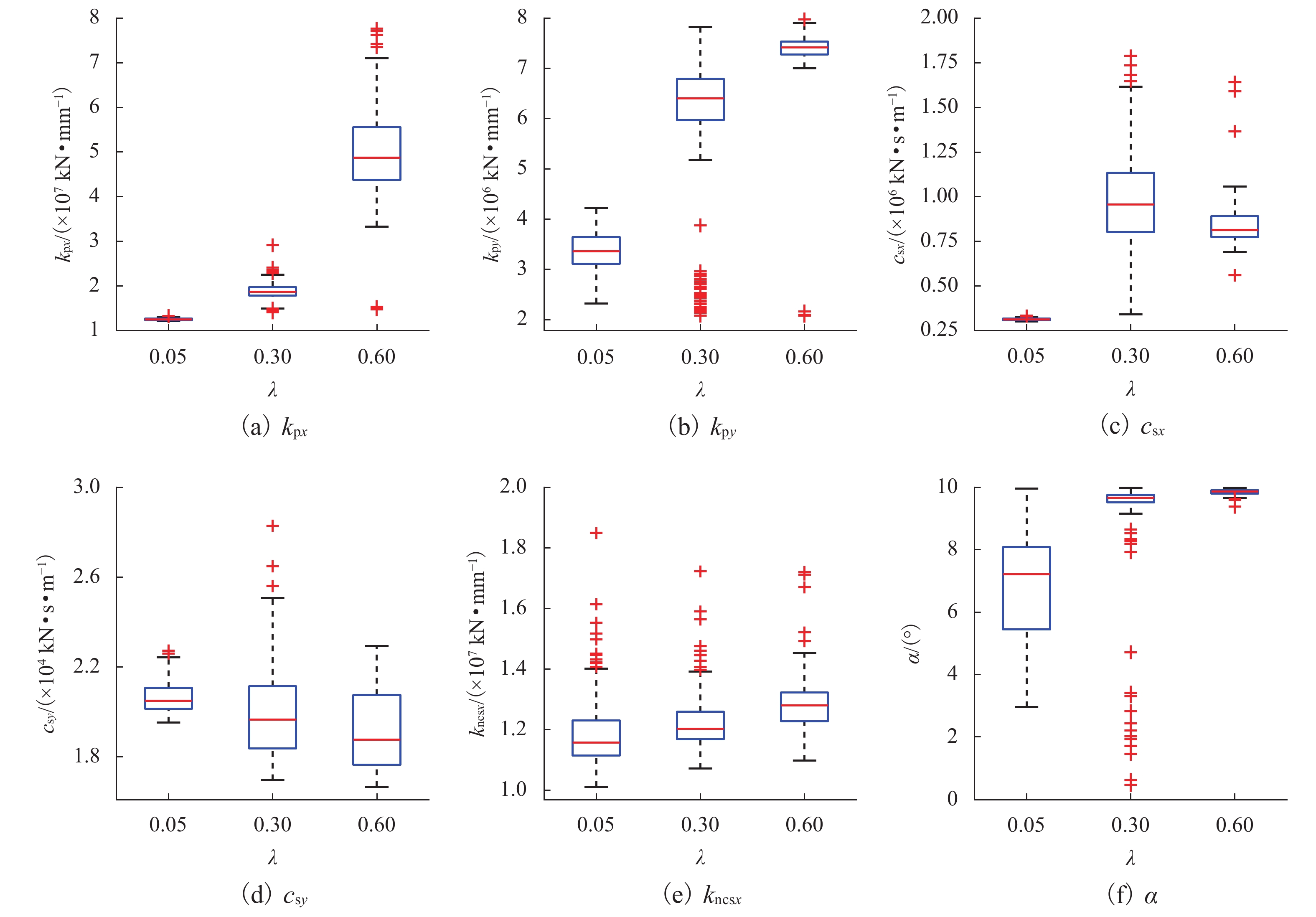
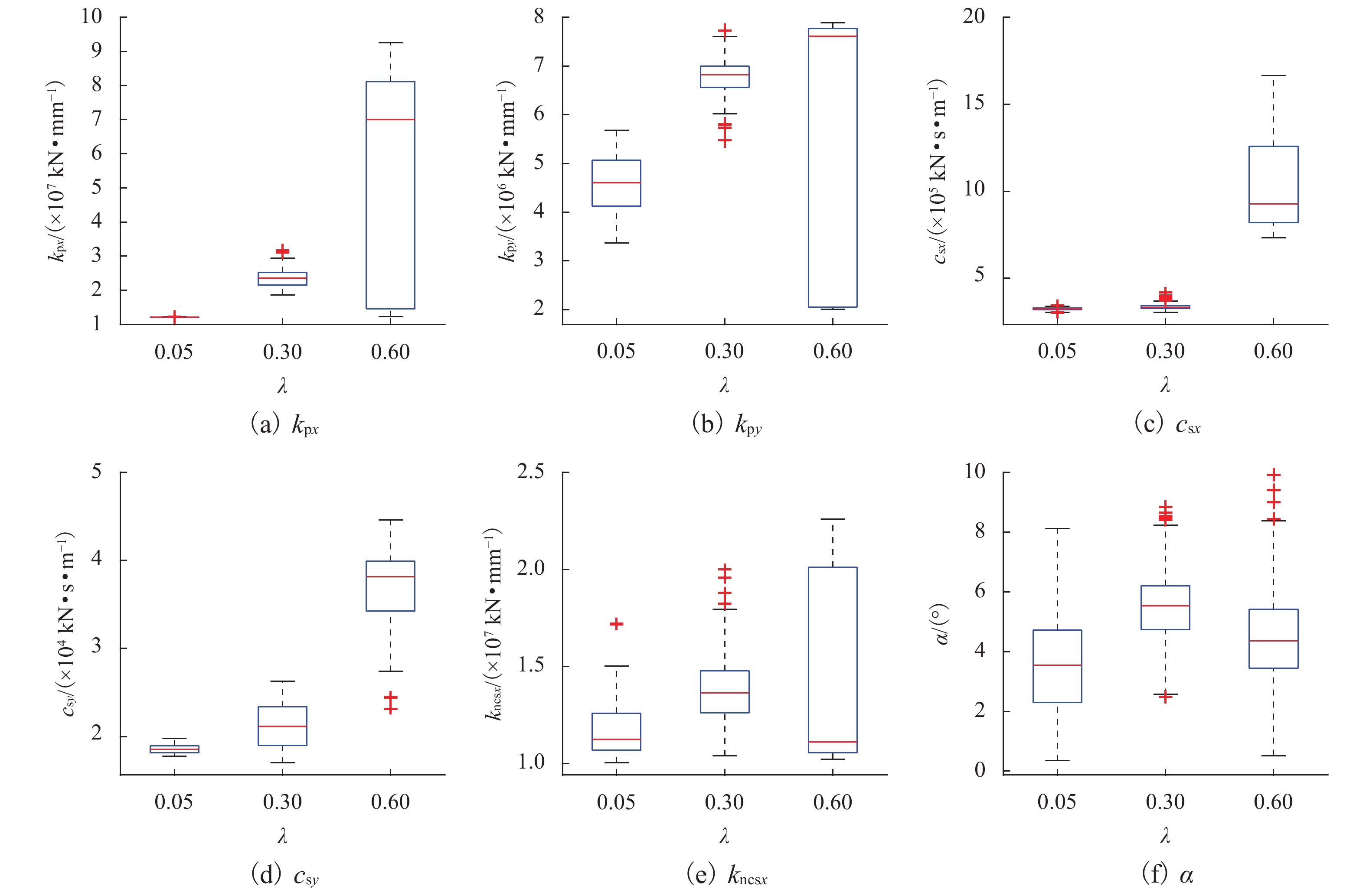
两种抗蛇行减振器布置方式机车对应3种轮轨接触等效锥度工况,符合各个动力学性能条件的最优悬挂参数分布如图4和图5所示,其对应动力学性能指标见图3中红色圆圈范围. 不同λ对应悬挂参数分布有所不同,从图中能够反应高低锥度工况所对应最优悬挂参数分布规律与差别.
由图4、5可知:1) 对于两种抗蛇行减振器布置方式mode 1和mode 2,两者在低锥度工况,一系纵向刚度kpx和抗蛇行减振器阻尼csx分布较为集中,并且取值较小,接近参数优化范围下限,表示较小的kpx和csx有利于机车低锥度稳定性;随着锥度λ的增加,两者优化的kpx、kpy和csx取值增大;对于mode 1,在不同锥度工况下csy和kncsx取值都较小;对于mode 2,优化的csy和kncsx随着等效锥度的增加而增加. 2) 两种抗蛇行减振器布置方式最大区别体现在减振器的最优安装角度α,在低锥度工况,二者对应α分布较宽,即α对低锥度机车横向动力学性能影响不敏感;而对应高锥度工况,抗蛇行减振器同侧内置(mode 1)需要较大的安装角度,抗蛇行减振器斜对称布置(mode 2)对安装角度不敏感.
3. 悬挂参数匹配
3.1 参数筛选法
第2节采用多目标优化方法分析了不同轮轨接触等效锥度工况对应符合机车横向动力学性能的悬挂参数分布规律. 实际运用过程中随着轮轨型面磨耗和线路条件的变化,机车动力学性能设计需考虑到机车较宽的服役条件,兼顾不同轮轨接触状态的机车动力学性能,因此需同时考虑到高低轮轨接触状态对机车悬挂参数进行优化匹配.
针对该6项悬挂参数在计算范围内形成随机组合的随机参数集,并依次赋给机车动力学模型进行动力学性能计算,将符合条件的参数组保留并进行匹配规律分析. 选取高低3种不同轮轨接触等效锥度状态下机车的稳定性指标ζmax和前、后司机室横向平稳性指标Wf、Wb作为动力学性能的筛选条件,表3中给出了3种工况下该3个横向动力学性能指标的阈值. 本文针对该6个关键悬挂参数生成含有200000组均匀分布随机参数的矩阵,逐组赋值给机车动力学模型进行横向动力学性能指标计算,通过对计算结果的筛选,最终从大量随机参数组中得到满足全部性能指标要求的悬挂参数组合.
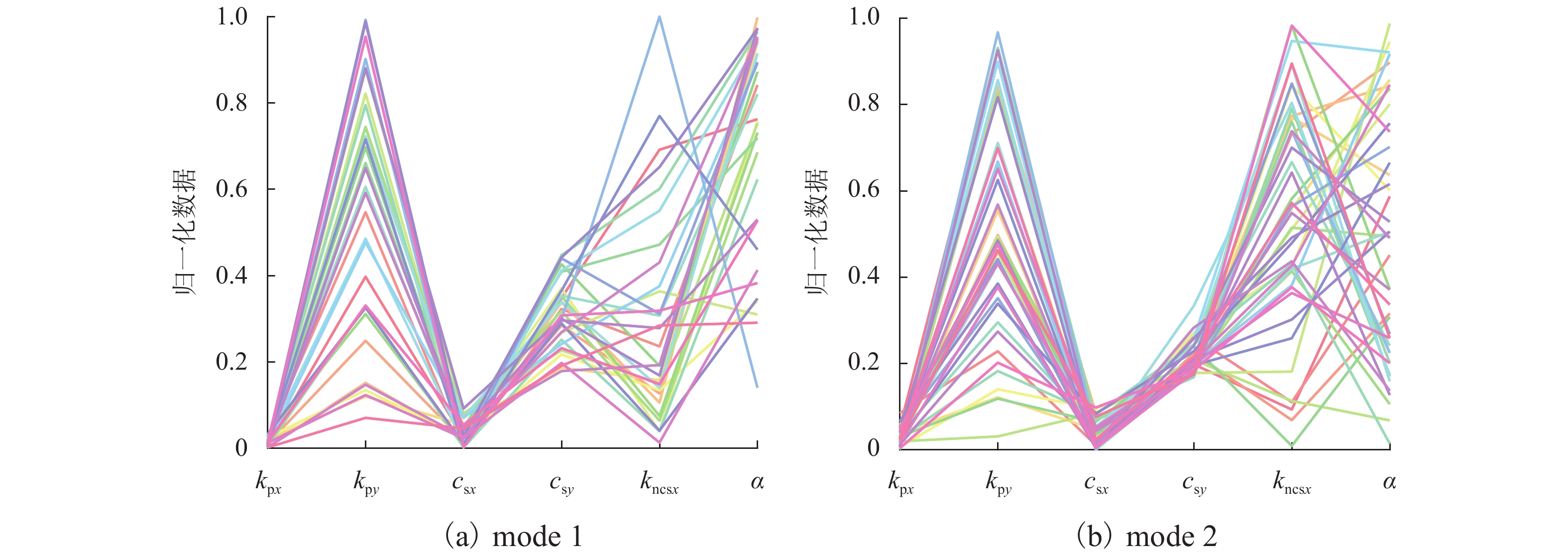
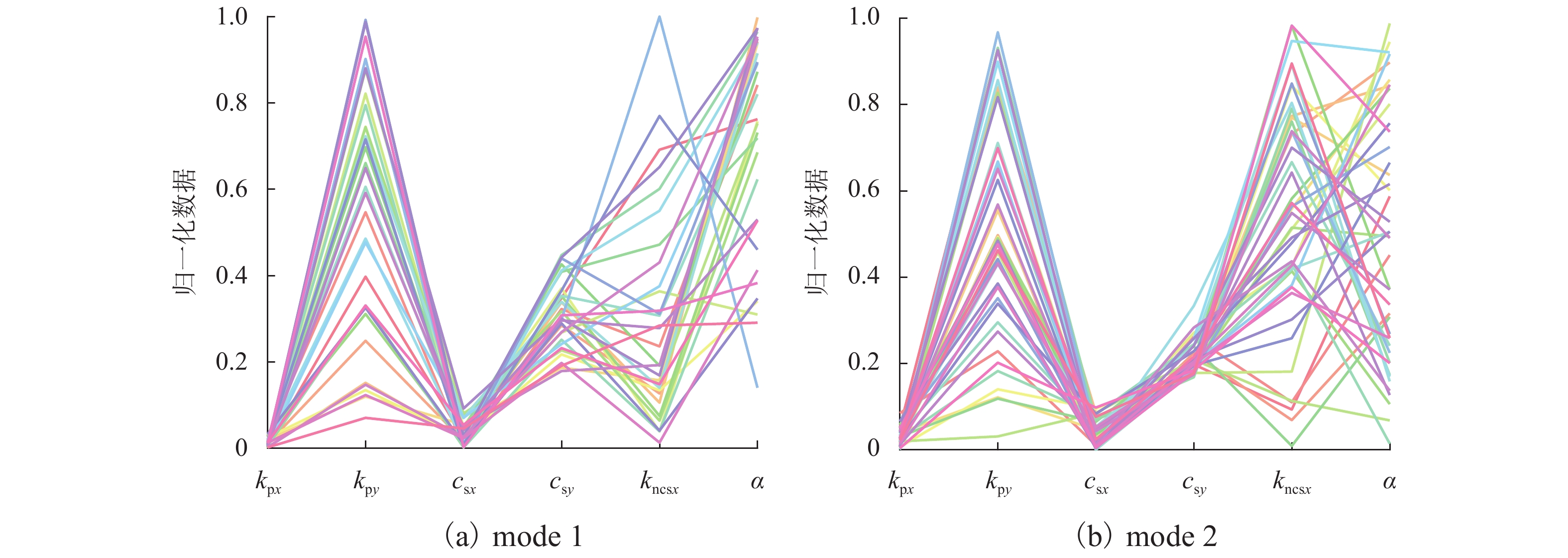
表 3 横向动力学性能指标阀值Table 3. Threshold of dynamic performance indexλ ζmax Wf Wb 0.05 ≤−0.10 ≤2.5 ≤2.5 0.30 [−0.25, −0.16] ≤2.5 ≤2.5 0.60 [−0.25, −0.16] ≤2.5 ≤2.5 为了将符合条件的6个关键悬挂参数在同一图中表示,悬挂参数通过归一化处理后其组合匹配规律如图6所示. 图中同一条颜色的折线段表示同一组悬挂参数,纵坐标表示参数归一化数据,其中1.0表示计算范围内的最大值,0表示最小值. 由图6可知:该6个关键悬挂参数之间具有明显的匹配规律,即某一个或几个参数选择较大值时,另外一个或几个参数需选择较小或适中的参数与之匹配;kpx、csx取值集中,接近相应的优化范围下限,csy也集中在较小值,即满足动力学性能指标要求对应的kpx、csx、csy需要取较小值;kpy、kncsx和α可选范围较宽,在给定的参数优化范围内都有取值;对于mode 1,其kncsx出现在偏小值范围内次数较多,相应的α分布在较大值范围内的参数出现次数比较多;mode 2,其kncsx出现在偏大值范围内次数较多,α则分布得较为均匀,这与2.3节中优化悬挂参数分布规律一致.
3.2 相关性分析
针对以上生成的随机参数集以及相应动力学性能指标的计算结果,依次对3种等效锥度工况下悬挂参数与性能指标进行 Pearson相关系数计算,分析悬挂参数对机车横向动力学性能的影响趋势.
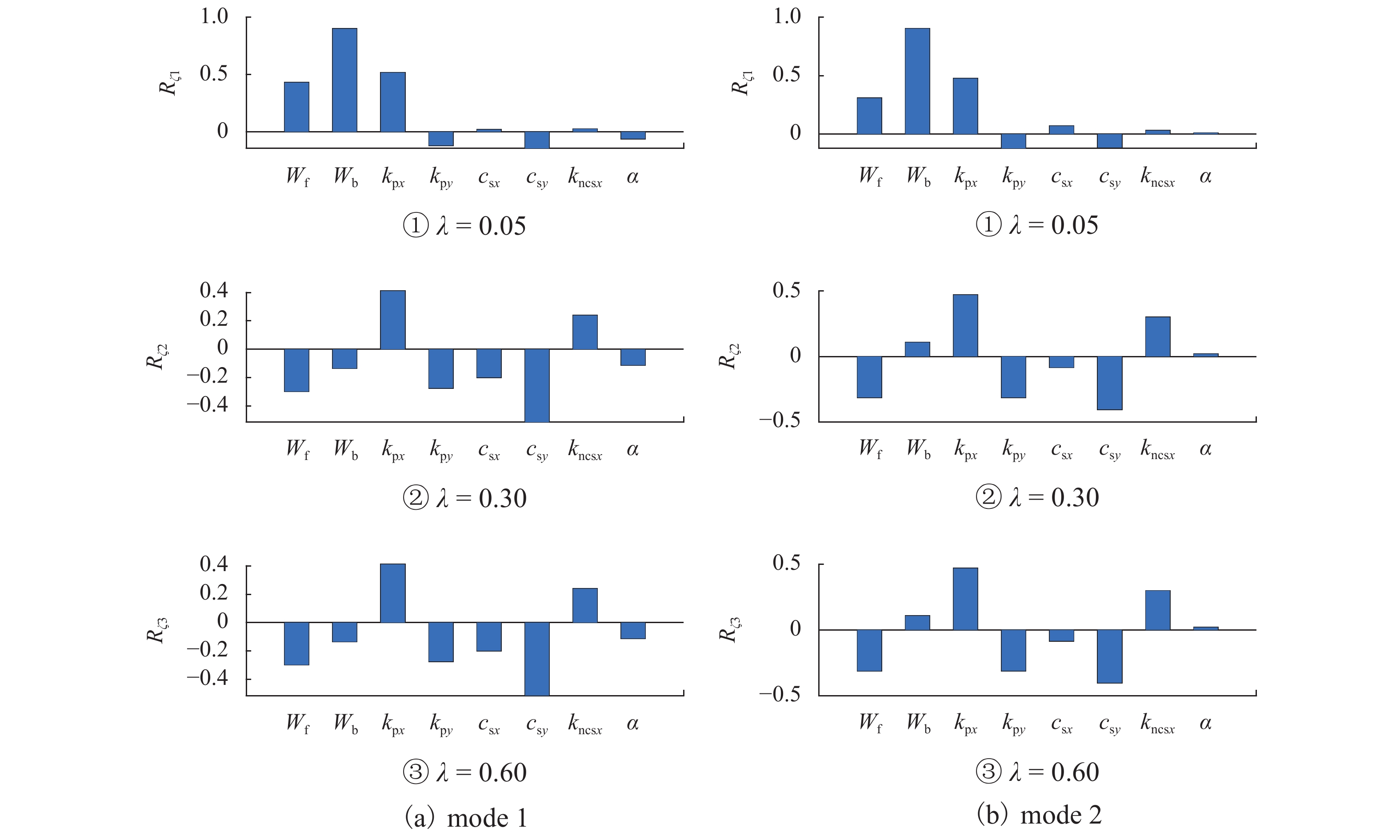
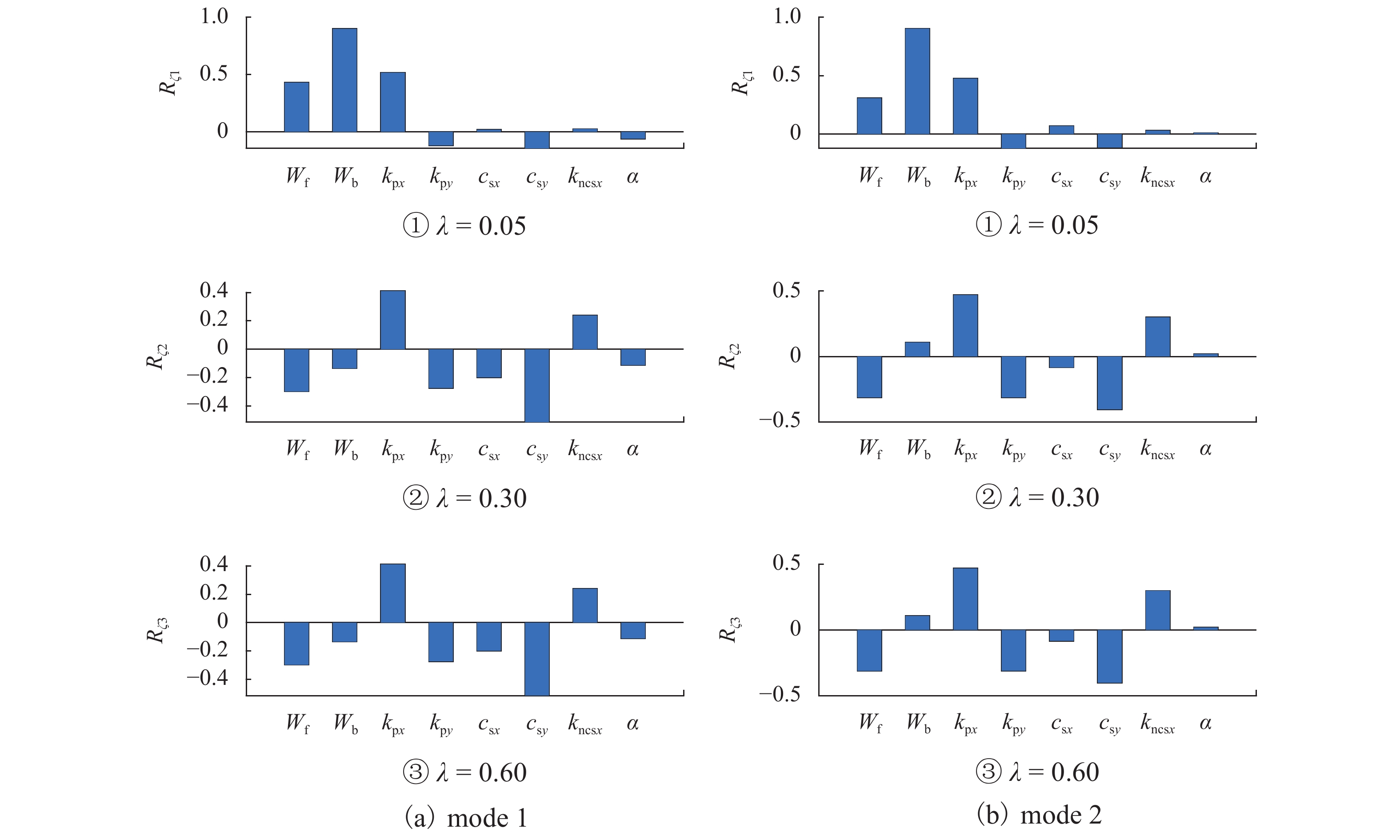
图7分别为两种抗蛇行减振器布置方式在3种等效锥度工况的计算结果,在同一图内体现6个悬挂参数和3个性能指标各自的相关性. 图中:ζ1、ζ2、ζ3为不同等效锥度下的稳定性指标;Rζ1为悬挂参数与ζ1所在工况的相关性;Rζ2为参数与ζ2工况的相关性,以此类推. 柱状图为正时表示正相关,相反表示负相关,柱状图高度表示相关程度.
由图7可知:1) 对于低锥度工况,机车横向平稳性尤其Wb与ζmax具有强正相关性,kpx与ζmax正相关性较强,而其他参数相关性不明显,因而低锥度工况减小kpx有利于机车稳定性进而对机车平稳性有利. 2) 对于高锥度工况,λ为0.30和0.60时的结果相当,机车横向平稳性指标与机车稳定性指标正相关性不强,呈负相关性.
高锥度工况6个悬挂参数、Wf与Wb的相关性见表4,由表4可知:Wf、Wb具有高度的相关性,横向平稳性指标与机车二系横向减振器阻尼csy值强正相关,减小csy有利于提高车体横向平稳性;减小kpx、csx、kncsx和增大kpy有利于机车横向平稳性.
表 4 悬挂参数、Wf与Wb的相关系数Table 4. Correlation coefficients of suspension parameters and Wf with Wbmode Wf kpx kpy csx csy kncsx α 1 0.90 0.31 −0.25 0.24 0.88 0.08 −0.12 2 0.81 0.25 −0.29 0.28 0.83 0.15 0.01 4. 结 论
1) 本文提出基于横向平稳性和蛇行稳定性多目标性能的高速机车关键悬挂参数优化方法,针对线性系统模型,采用虚拟激励法的频域横向平稳性指标计算具有计算速度快的优点,可以满足基于遗传算法的多目标多参数优化计算要求.
2) 针对高速机车两种抗蛇行减振器布置方式及不同轮轨接触等效锥度工况进行悬挂参数优化匹配规律分析,低锥度工况机车稳定性较差且横向平稳性与之强相关,尤其采用抗蛇行减振器斜对称布置方式,机车后司机室横向平稳性显著变差. 对于低锥度工况,需要以提高机车横向稳定性为优化目标,而高锥度工况当蛇行模态阻尼比满足一定条件时更需关注其横向平稳性.
3) 为了兼顾在不同轮轨接触状态时机车的横向动力学性能,提高机车线路适应能力,机车的一系纵向刚度、抗蛇行减振器阻尼和二系横向减振器阻尼值在文中给定的优化范围内,应尽量选取较小值;对于抗蛇行减振器斜对称布置方式,其水平面安装角度对机车横向性能不敏感,而同侧内置布置方式,抗蛇行减振器安装角度对机车横向动力学性能的影响较为明显.
致谢:牵引动力国家重点实验室自主研究课题(2022TPL-Q02).
-
表 1 模型部分参数
Table 1. Partial parameters of model
参数 符号 数值 速度 V/(km·h−1) 160 新轮轨接触等效锥度 λ 0.1 轴重 Ld/t 19.5 轴距 b/m 2.8 车辆定距 l/m 10.2 车体质量 mc/t 42 转向架质量 mb/t 18 电机质量 md/t 3.5 转向架单侧二系横向刚度 ksy/(kN·mm−1) 0.24  下载: 导出CSV
下载: 导出CSV
表 2 悬挂参数优化范围
Table 2. Optimization range of suspension parameters
参数 优化范围 kpx/ (kN·mm−1) 12 ~ 100 kpy/ (kN·mm−1) 2 ~ 8 csx/ (kN·s·m−1) 300 ~ 2000 csy/ (kN·s·m−1) 10 ~ 60 kncsx/(kN·mm−1) 10 ~ 25 α/(°) 0 ~ 10
下载: 导出CSV
表 3 横向动力学性能指标阀值
Table 3. Threshold of dynamic performance index
λ ζmax Wf Wb 0.05 ≤−0.10 ≤2.5 ≤2.5 0.30 [−0.25, −0.16] ≤2.5 ≤2.5 0.60 [−0.25, −0.16] ≤2.5 ≤2.5
下载: 导出CSV
表 4 悬挂参数、Wf与Wb的相关系数
Table 4. Correlation coefficients of suspension parameters and Wf with Wb
mode Wf kpx kpy csx csy kncsx α 1 0.90 0.31 −0.25 0.24 0.88 0.08 −0.12 2 0.81 0.25 −0.29 0.28 0.83 0.15 0.01
下载: 导出CSV
-
[1] BRAGHIN F, BRUNI S, RESTA F. Active yaw damper for the improvement of railway vehicle stability and curving performances: simulations and experimental results[J]. Vehicle System Dynamics, 2006, 44(11): 857-869. doi: 10.1080/00423110600733972 [2] YAO Y, LI G, SARDAHI Y, et al. Stability enhancement of a high-speed train bogie using active mass inertial actuators[J]. Vehicle System Dynamics, 2019, 57(3): 389-407. doi: 10.1080/00423114.2018.1469776 [3] YAO Y, WU G S, SARDAHI Y, et al. Hunting stability analysis of high-speed train bogie under the frame lateral vibration active control[J]. Vehicle System Dynamics, 2018, 56(2): 297-318. doi: 10.1080/00423114.2017.1375128 [4] JIANG J Z, MATAMOROS-SANCHEZ A Z, GOODALL R M, et al. Passive suspensions incorporating inerters for railway vehicles[J]. Vehicle System Dynamics, 2012, 50(S1): 263-276. doi: 10.1080/00423114.2012.665166 [5] 金天贺,刘志明,任尊松,等. 高速列车半主动悬挂可变刚度和阻尼减振器适应性研究[J]. 振动工程学报,2020,33(4): 772-783. doi: 10.16385/j.cnki.issn.1004-4523.2020.04.016JIN Tianhe, LIU Zhiming, REN Zunsong, et al. Adaptability of variable stiffness and damping shock absorber for semi-active suspension of high speed train[J]. Journal of Vibration Engineering, 2020, 33(4): 772-783. doi: 10.16385/j.cnki.issn.1004-4523.2020.04.016 [6] 李响,任尊松,徐宁. 基于转向架悬挂参数与踏面锥度优化的高速车辆动力学性能分析[J]. 铁道学报,2018,40(3): 39-44. doi: 10.3969/j.issn.1001-8360.2018.03.006LI Xiang, REN Zunsong, XU Ning. Dynamic performance analysis of high-speed vehicle based on optimization of bogie suspension parameters and tread conicity[J]. Journal of the China Railway Society, 2018, 40(3): 39-44. doi: 10.3969/j.issn.1001-8360.2018.03.006 [7] YAO Y, LI G, WU G S, et al. Suspension parameters optimum of high-speed train bogie for hunting stability robustness[J]. International Journal of Rail Transportation, 2020, 8(3): 195-214. doi: 10.1080/23248378.2019.1625824 [8] HE Y P, MCPHEE J. Multidisciplinary optimization of multibody systems with application to the design of rail vehicles[J]. Multibody System Dynamics, 2005, 14(2): 111-135. doi: 10.1007/s11044-005-4310-0 [9] JOHNSSON A, BERBYUK V, ENELUND M. Pareto optimisation of railway bogie suspension damping to enhance safety and comfort[J]. Vehicle System Dynamics, 2012, 50(9): 1379-1407. doi: 10.1080/00423114.2012.659846 [10] MOUSAVI-BIDELEH S M, BERBYUK V. Multi-objective optimisation of bogie suspension to boost speed on curves[J]. Vehicle System Dynamics, 2016, 54(1): 58-85. doi: 10.1080/00423114.2015.1114655 [11] 解欢,杨岳,童林军,等. 基于混合代理模型的高速轨道车辆悬挂参数多目标优化[J]. 铁道科学与工程学报,2016,13(10): 2056-2063. doi: 10.3969/j.issn.1672-7029.2016.10.025XIE Huan, YANG Yue, TONG Linjun, et al. Multi-objective optimization of the suspension parameters for high speed rail vehicle based on a hybrid surrogate model[J]. Journal of Railway Science and Engineering, 2016, 13(10): 2056-2063. doi: 10.3969/j.issn.1672-7029.2016.10.025 [12] MOUSAVI BIDELEH S M, BERBYUK V, PERSSON R. Wear/comfort Pareto optimisation of bogie suspension[J]. Vehicle System Dynamics, 2016, 54(8): 1053-1076. doi: 10.1080/00423114.2016.1180405 [13] MOHEBBI M, REZVANI M A. Multi objective optimization of aerodynamic design of high speed railway windbreaks using Lattice Boltzmann Method and wind tunnel test results[J]. International Journal of Rail Transportation, 2018, 6(3): 183-201. doi: 10.1080/23248378.2018.1463873 [14] 姚远,陈相旺,李广,等. 高速列车抗蛇行减振器参数的多目标优化研究[J]. 西南交通大学学报,2021,56(6): 1298-1304.YAO Yuan, CHEN Xiangwang, LI Guang, et al. Multi-objective optimization of yaw damper parameters for high-speed train[J]. Journal of Southwest Jiaotong University, 2021, 56(6): 1298-1304. [15] 中华人民共和国铁道部. 铁道机车动力学性能试验鉴定方法及评定标准: TB/T 2360—1993[S]. 北京: 中国铁道出版社, 1994. [16] 林家浩, 张亚辉. 随机振动的虚拟激励法[M]. 北京: 科学出版社, 2004. [17] 王平,杨帆,韦凯. 扣件胶垫刚度频变的车-线-隧垂向耦合随机振动虚拟辛分析[J]. 西南交通大学学报,2017,52(2): 209-215. doi: 10.3969/j.issn.0258-2724.2017.02.001WANG Ping, YANG Fan, WEI Kai. Symplectic random vibration analysis of vertically coupled vehicle-track-tunnel system considering frequency-dependent stiffness of rail pads[J]. Journal of Southwest Jiaotong University, 2017, 52(2): 209-215. doi: 10.3969/j.issn.0258-2724.2017.02.001 [18] LIU X X, ZHANG Y H, GUO H F, et al. Random vibration analysis procedure of railway vehicle[J]. Vehicle System Dynamics, 2020, 58(12): 1873-1892. doi: 10.1080/00423114.2019.1656813 [19] DEB K, PRATAP A, AGARWAL S, et al. A fast and elitist multiobjective genetic algorithm: NSGA-II[J]. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182-197. doi: 10.1109/4235.996017 期刊类型引用(5)
1. 沈龙江,李广,邓小星,姚远. 动力集中动车组动力车前后横向平稳性差异研究. 铁道学报. 2024(07): 23-29 .  百度学术
百度学术2. 李广,吴毅,姚远,邓小星,陈国胜. 抗蛇行减振器布置对动力车横向动力学性能影响及机理研究. 铁道学报. 2024(08): 30-36 . 百度学术3. 张喜清,李鹏,史青录,李幸人. 宽轨机车水平悬挂参数对临界速度的影响. 科学技术与工程. 2023(03): 1230-1237 . 百度学术4. 李广,姚远,陈相旺,沈龙江. 基于全因子DOE的机车抗蛇行减振器布置方式及参数优化. 中南大学学报(自然科学版). 2023(05): 2074-2084 . 百度学术5. 姚远,程俊,张名扬,沈龙江. 高速列车抗蛇行减振器作用机制与频变刚度应用研究. 振动工程学报. 2022(06): 1461-1470 . 百度学术其他类型引用(5)
-

 下载:
下载:














 下载:
下载:

 百度学术
百度学术
 点击查看大图
点击查看大图
计量
- 文章访问数: 512
- HTML全文浏览量: 170
- PDF下载量: 53
- 被引次数: 10