

Evaluation Difference of Dynamic and Static Track Irregularity and Characteristics of Dynamic Chord Measurement Method
-
摘要:
中点弦测法能够有效控制影响行车安全性和舒适性的指定波段轨道不平顺,主要用于测量轨道静态不平顺,但其较低的测量效率制约着轨道“状态修”的发展. 针对上述问题,将轨道动态不平顺按中点弦测输出,分析动静态弦测值差异与弦长和不平顺波长的关联关系,提出能够评价轨道动态平顺性的动态弦测法,研究动态不平顺与静态不平顺间的映射关系. 研究结果表明:42 m和70 m动态高通滤波幅值分别与10 m弦和20 m弦测值变化规律相当;当不平顺波长大于70 m时,120 m动态高通滤波幅值与40 m弦测值变化规律基本对应;截止波长为42、70、120 m的轨道动态不平顺,分别与弦长为20、30 ~ 40、30 ~ 60 m的动态弦测波形相关性最优,对应的动态弦测法最大合理弦长分别为20、30、40 m,通过路基和简支梁区段实测数据验证了动态弦测法的适应性;在路基沉降区段,弦长为60 m时,静态弦测值明显朝负方向偏离动态弦测值的处所为沉降点,相邻两侧朝正方向偏离动态弦测值的处所为沉降区段起终点.
Abstract:The midpoint chord method can effectively control the track irregularity of the designated band that affects the driving safety and comfort. It is mainly used to measure the track static irregularity. However, its low measurement efficiency restricts the development of track ‘state-maintenance’. To solve the above problems, the track dynamic irregularity is output according to the midpoint chord. The correlation between the dynamic and static chord measured values with the chord length and the irregularity wavelength is analyzed. The dynamic track irregularity is outputed according to the midpoint chord measurement. A dynamic chord measurement method is proposed, that can evaluate the dynamic smoothness of the track, and studies the mapping relationship between dynamic irregularity and static irregularity. The results show that, the dynamic high-pass filter amplitudes of 42 m and 70 m are equivalent to the measured values of 10 m chord and 20 m chord respectively. When the irregularity wavelength is greater than 70 m, the 120 m dynamic high-pass filter amplitude basically corresponds to the variation law of 40 m chord measured value. The track dynamic irregularities with cut-off wavelengths of 42, 70 m and 120 m have the best correlation with the dynamic chord measurement waveforms with chord lengths of 20, 30–40 m and 30–60 m respectively. The maximum reasonable chord lengths of the dynamic chord measurement method are 20, 30 m and 40 m respectively. The adaptability of the dynamic chord measurement method has been verified by the measured data of subgrade and simply supported beam sections. In the subgrade settlement section, when the chord length is 60 m, the place where the static chord measurement value deviates significantly from the dynamic chord measurement value in the negative direction is the settlement point, and the places where the adjacent two sides deviate from the dynamic chord measurement value in the positive direction are the beginning and end of the settlement section.
-
轨道不平顺是加剧轮轨作用力和列车振动的重要诱因. 高速行车条件下,轨道不平顺不仅降低旅客乘坐舒适性,还会加剧轨道结构的疲劳伤损,降低线路使用寿命,甚至造成列车脱轨等安全事故[1]. 因此,保持线路的高平顺性,是高速列车安全平稳运行的重要保障.
我国高速铁路坚持“动态检查为主,动静态检查相结合”的原则. 动态检测以综合检测列车检测结果为主要依据,使用巡检设备、车载式线路检查仪和添乘检查作为辅助手段. 发现问题时,结合现场静态复核,全面分析原因,合理确定维修方案和计划[2]. 诸多轨道不平顺指标中,轨距、水平、三角坑动静态检测原理基本一致,但轨向、高低动静态检测原理却并不相同. 具体来说,轨向、高低动态检测是基于惯性基准的偏差量,而静态检测主要采用中点弦测法和矢距差法得到的偏差值. 在关联性分析方面,杨飞等[3-4]通过车线动力学仿真提出了基于10、20、60 m中点弦测法的轨道不平顺评价方法,并利用5 m中点弦测法评价轨道板周期性不平顺. 相比于动态空间曲线,中点弦测法可以通过改变弦长,更有针对性地评价对行车安全性和舒适性影响显著的轨道不平顺波段. 此外,部分学者还基于中点弦测法和三点偏弦法将平顺性指标逆向还原真实轨道不平顺[5-7],为评价轨道不平顺提供了新的途径. 相比而言,矢距差法则有一定的局限性,魏晖等[8]推导了中点弦测值转换成矢距差的计算通式,借助矢距差法传递函数可以验证其不适用于高速铁路轨道长波不平顺的静态测量[9-10]. 综上,中点弦测法具备物理意义明确、不存在里程相位差、与车辆动力响应的匹配性更好等诸多优势,更利于进行轨道不平顺动静态关联性分析,指导现场养护维修作业.
目前,对轨道平顺性的静态检查主要依靠轨道测量仪、轨道检查仪或弦线、道尺等设备,受限于天窗时长、测量效率等因素制约,难以实现动静态检查有效结合. 为此,提出基于动态检测数据的动态弦测模型,建立动态不平顺与静态不平顺的映射关系,对于发挥动态检测数据功能,减少静态测量工作量,更好地指导轨道养护维修具有理论价值和现实意义.
1. 动态弦测法原理
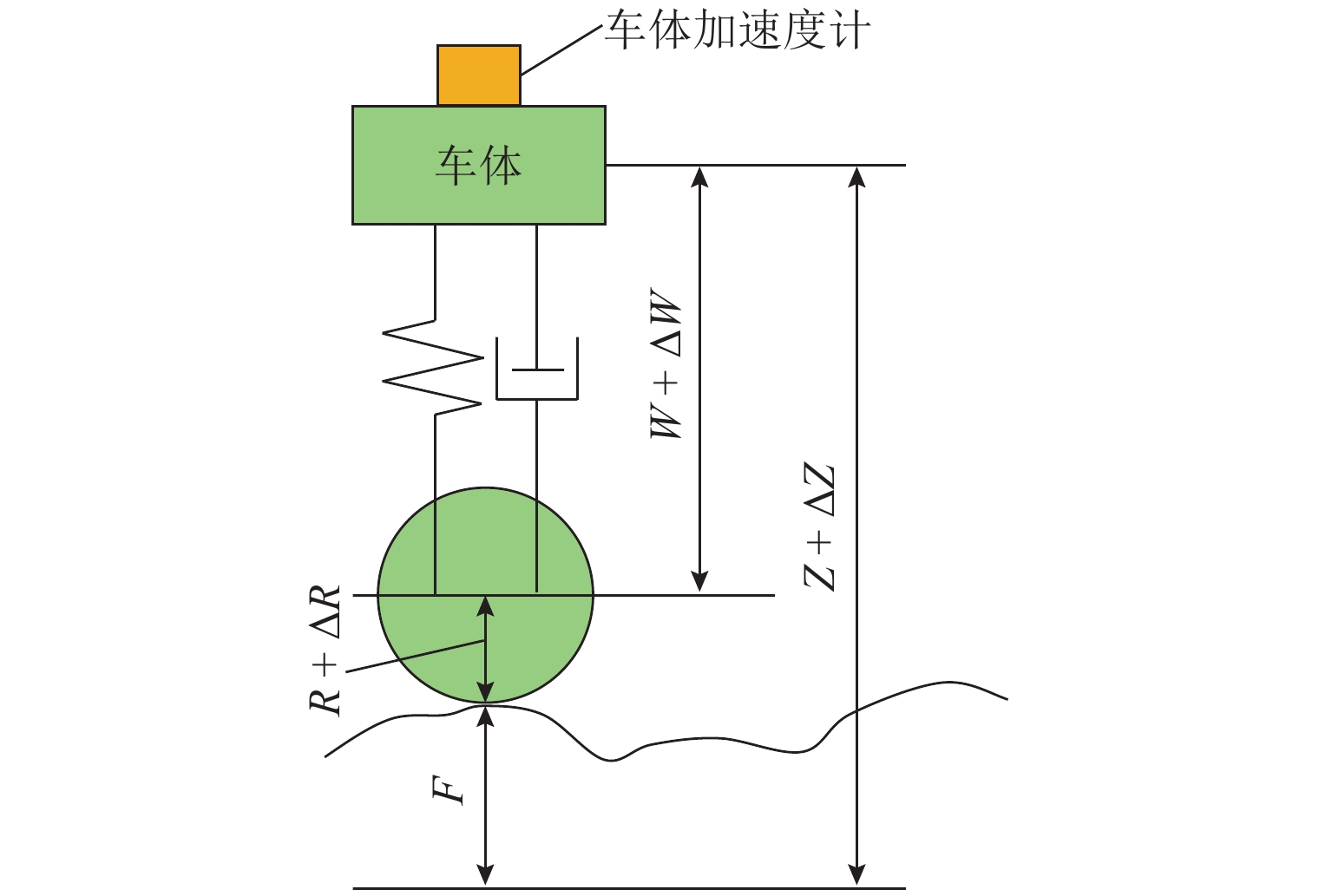
轨道动态不平顺是在列车荷载作用下,通过轨道检查车或综合检测列车测得的轨道不平顺. 我国GJ-6型轨道检测系统采用惯性基准法[11],以高低不平顺检测原理为例,见图1. 车体相对于惯性基准和轴箱的垂向位移分别为Z和W,车轮径为R,车体垂向加速度a经过二次积分,得到车体相对于惯性基准的垂向位移变化量
ΔZ ,用位移计测量车体与轴箱的相对垂向位移变化量ΔW ,轨检系统所在轮对的车轮径跳值ΔR 相对于轨道不平顺可忽略不计,轨道动态高低不平顺F的计算简化为F=ΔZ−ΔW−ΔR≈ΔZ−ΔW = ∬adtdt−ΔW, (1) 式中:t为时间.
对垂向位移变化量
ΔW 和ΔZ 进行高通滤波,剔除无用的长波成分,从而准确测量指定波长范围内的动态高低不平顺. 轨向不平顺的检测原理与之类似.轨道静态不平顺是指在无列车荷载作用下测得的轨道不平顺,其中,静态高低不平顺和轨向不平顺常采用中点弦测正矢或矢距差进行描述[12]. 在轨道静态不平顺容许偏差管理中,高低偏差和轨向偏差为10 m弦测量的正矢值;在轨道静态不平顺长弦测量作业验收中,采用5 m/30 m和150 m/300 m矢距差进行管理;而对于曲线正矢则采用20 m弦测正矢值进行管理[13-14].
动态高低不平顺和轨向不平顺是相对于惯性基准的偏差数据,而静态高低不平顺和轨向不平顺最常用的是中点弦测矢度值,二者在评价结果上存在显著差异[15]. 为建立动态不平顺与静态不平顺的关联关系,将动态高低不平顺和轨向不平顺按中点弦测法输出,从而转换成与静态检测结果一致的弦测值,命名为动态弦测值,记作Q,如图2所示,图中:l为半弦长;vi为第i点的静态高低不平顺;fi为第i点的动态高低或轨向不平顺幅值;
fi−r 和fi+r 分别为第i点所在弦的起点和终点处动态高低或轨向不平顺幅值,r为中点矢距的采样间隔;qi为第i点的中点矢距,如式(2)所示. 图 2 基于动态弦测法的轨道高低不平顺测量Figure 2. Track longitudinal level measurements with the dynamic chord method
图 2 基于动态弦测法的轨道高低不平顺测量Figure 2. Track longitudinal level measurements with the dynamic chord methodqi=fi−fi−r+fi+r2. (2) 对式(2)进行傅里叶变换,得到中点弦测法的幅度谱
|Hq(ω)| 和相位谱φq(ω) 如式(3)所示.{|Hq(ω)|=1−cos(2πl/2πlλλ),φq(ω)=0, (3) 式中:
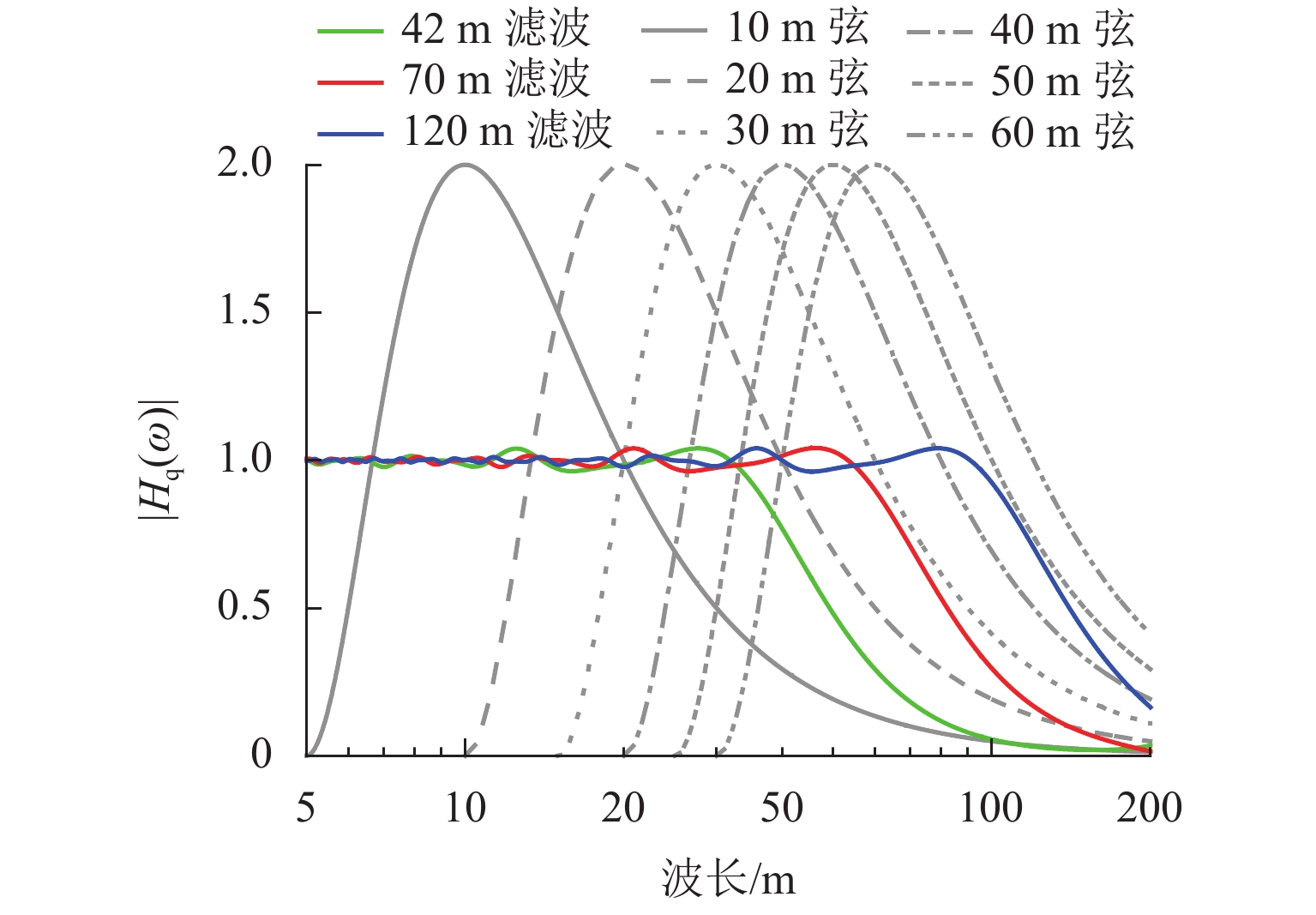
ω = 2π/λ 为空间角频率,rad/m;λ 为轨道不平顺波长,m.由式(3)可知,中点弦测法的幅值增益与弦长、不平顺波长有关,在0 ~ 2之间波动,相位偏差恒为0,相频无时延和失真[16]. 图3绘制了中点弦测法的幅频特性,将幅值增益不小于1视为有效检测,可以得到10、20、30、40、50、60 m弦对应的有效检测波段分别为7 ~ 20、13 ~ 40、20 ~ 60、27 ~ 80、33 ~ 100、40 ~ 120 m. 动态高低和轨向不平顺原始信号经过数字高通滤波器滤除无用的长波成分,准确截取有效的波长成分,使通带内的幅值增益近似为1[17]. 当弦测法的有效检测波段超出高通滤波截止波长时,低频(长波)成分经高通滤波后衰减,动态弦测值与真实静态弦测值相比会产生较大差异,从而使动态弦测结果长波成分严重失真. 因此,动态弦测法应有最大合理弦长的限制. 我国轨道动态不平顺最大截止波长主要分为42、70、120 m,对于理想滤波器而言,最大截止波长分别42、70、120 m的高通滤波器分别能够覆盖最大弦长为20、30、60 m的有效检测波段. 由于并不存在绝对理想的滤波器,且轨道不平顺是由不同波长、不同幅值和不同相角的简谐波叠加而成的复杂随机波,实际覆盖的最大弦长将会低于这些波段.
2. 动态弦测法特性分析
2.1 动、静态轨道不平顺的差异性分析
根据国外研究经验,可运用单波轨道不平顺分析带通滤波、中点弦测法和偏弦测法对波形扭曲的影响[18]. 同理,为研究动态和静态检测传递特性,可将单波余弦型不平顺作为分析对象. 不平顺波形如图4所示,λ由5 m递增至300 m,波幅A0恒为100 mm. 分别采用截止波长为42、70、120 m的高通滤波器对构造不平顺滤波,模拟得到轨道动态不平顺. 采用弦长为10 ~ 60 m的中点弦,弦长步距10 m,输出构造不平顺的中点弦测值,模拟得到轨道静态不平顺.
图5绘制了波长为5、50、100 m的动态和静态检测波形. 可以看出,单波余弦型不平顺经过高通滤波或中点弦测法处理后,原始波形的形状和幅度都被扭曲,均呈现出中间“下凹”、两侧“上凸”的特征,并且随着截止波长或弦长的增大而增大,影响范围也逐渐向两侧延扩. 中点弦测法具有线性相位特性,“下凹”最低点的所在位置与原始波形的一致. 轨检系统的高通滤波器由于具有良好的相频特性,“下凹”最低点的所在位置也与原始波形相差不大.
 图 5 部分典型余弦型不平顺动、静态波形Figure 5. Dynamic and static waveforms of some typical cosine irregularities
图 5 部分典型余弦型不平顺动、静态波形Figure 5. Dynamic and static waveforms of some typical cosine irregularities图6绘制了原始不平顺波幅为100 m的动态和静态不平顺“下凹”峰值随不平顺波长的变化规律. 从动态检测结果来看,同一不平顺波长条件下,高通滤波幅值随着滤波器截止波长的增大而增大. 同一截止波长条件下,动态检测幅值随着不平顺波长的增大而降低,并分别在各自截止波长42、70 m和120 m处存在拐点,超过截止波长后变化趋于平稳,并逐渐降至0. 从静态中点弦测结果来看,同一弦长条件下,当不平顺波长小于等于弦长时,静态弦测值幅值基本保持在原100 mm不变;当不平顺波长超过弦长时,静态弦测值幅值降低,然后逐渐趋于平稳. 当不平顺波长超过各自弦长时,同一不平顺波长条件下,弦长越长,静态弦测值幅值越大.
 图 6 动、静态不平顺峰值随波长的变化规律Figure 6. Variation of peak values of dynamic and static irregularity with wavelength
图 6 动、静态不平顺峰值随波长的变化规律Figure 6. Variation of peak values of dynamic and static irregularity with wavelength从动、静态检测结果对比来看,42 m和70 m滤波幅值分别与10 m和20 m弦测值变化规律基本对应;当不平顺波长大于70 m时,120 m滤波幅值与40 m弦测值变化规律基本对应,这说明动、静态的轨道平顺性评价在一定程度上是等价的. 对于现场常见的单峰型不平顺,当弦长大于不平顺波长时,中点弦测法能够准确测量不平顺的真实幅值,而高通滤波会削弱不平顺幅值测量结果. 考虑到轨道动态不平顺是在有载条件下测得的,更契合列车运营实际情况. 因此,将动态弦测法作为动态检测补充输出方式十分必要.
2.2 动态弦测法检测精度的影响因素
图7绘制了截止波长为42、70 m和120 m动态检测波形经过中点弦测法处理后的动态弦测结果. 相比于高通滤波后的波形,动态弦测波形中间“下凹”、两侧“上凸”的特征变化规律与不平顺波长密切相关,但同样也随着弦长的增大而被放大.
 图 7 部分典型余弦型不平顺动态弦对比Figure 7. Comparison of dynamic chords with some typical cosine irregularities
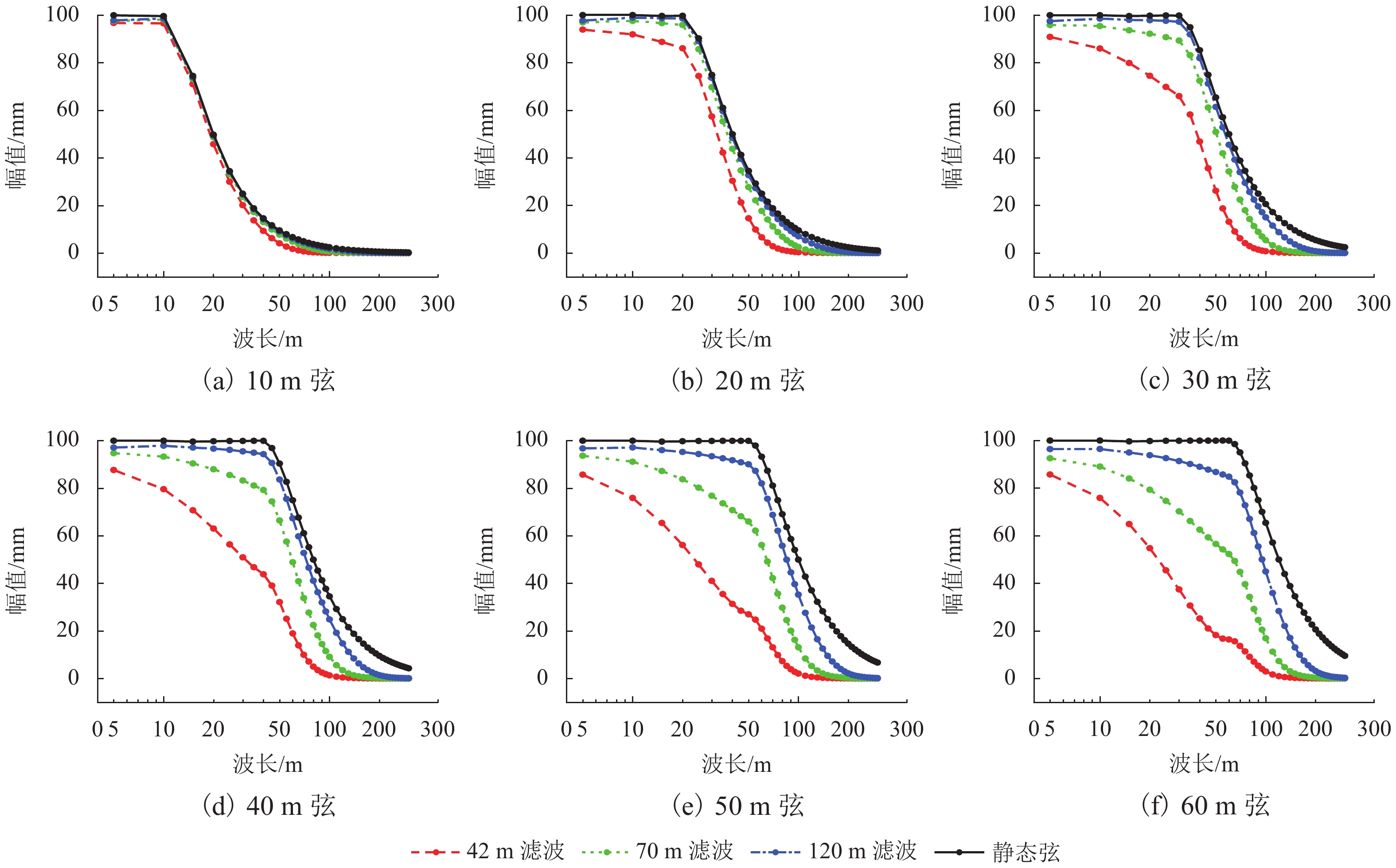
图 7 部分典型余弦型不平顺动态弦对比Figure 7. Comparison of dynamic chords with some typical cosine irregularities图8绘制了动态弦测和静态弦测结果“下凹”峰值随不平顺波长的变化规律. 动态弦测幅值的变化规律与静态弦测相近,呈现出先缓慢降低,后迅速降低并逐渐变缓的趋势,当弦长超过40 m时,不平顺波长与弦长一致时,会存在明显的拐点. 同一弦长条件下,高通滤波截止波长越大,动态弦测幅值越接近真实的静态弦测值. 随着弦长的增大,高通滤波截止波长越小,会使动态弦测幅值与真实的静态弦测值之间的差距越来越大. 为了保证某一弦长的动态弦测精度,必须要求高通滤波的截止波长足够大,也就是说,为了保证某一截止波长的动态弦测精度,必须保证弦长取值应在合理的范围内.
无论是高通滤波、中点弦测还是动态弦测,输出结果的幅值随输入不平顺幅值是线性变化的,因此,其他波幅的变化规律与波幅为100 mm的结果是一致的. 为了进一步定量分析任意固定截止波长条件下弦长的合理取值范围. 计算了不同弦长条件下,真实的静态弦测值与各个截止波长的动态弦测幅值之差占原始不平顺幅值(100 mm)的百分比,可以将其描述为动态弦测法的误差,见表1. 将20%作为误差阈值,误差超过阈值则可认为动态弦测法的精度已经不能达到要求.
表 1 动态弦测误差Table 1. Dynamic chord measurement error% 截止波长/m 弦长/m 10 20 30 40 50 60 42 5.4 20.0 39.3 58.2 73.2 83.6 70 2.4 7.7 16.6 27.5 39.3 51.0 120 2.2 2.7 6.0 10.4 15.7 21.8 由表1得出,截止波长为42、70 m和120 m的动态弦测法最大合理弦长可以分别取为20、30 m和50 m. 考虑到120 m长波不平顺与车辆运行姿态密切相关,测量精度会受到一定影响;但更长波的不平顺幅值往往更大,需要适当降低误差阈值. 因此,将截止波长为120 m的动态弦测法最大合理弦长降为40 m. 在上述各截止波长与合理弦长组合的范围内,同一弦长条件下,动态不平顺截止波长越大,动态弦测法的误差就越小,用最大截止波长为120 m的动态不平顺弦测值来替代静态弦测值的精度更高.
2.3 动态弦测值与原始动态不平顺的关系
计算某高铁线路路基和简支梁区段120 m长波高低不平顺的动态弦测值,弦长取10 ~ 60 m. 统计得到实测高低不平顺峰值和不同弦长动态弦测峰值10% ~ 100%分位数对应的幅值,两者的对应关系如图9所示,图中横轴x为120 m长波高低不平顺的各百分位值,简称“高低不平顺峰值”,纵轴y为动态弦峰值的各百分位值,简称“动态弦峰值”. 同一弦长条件下,动态弦峰值与高低不平顺峰值呈线性关系. 从图9(a)看出:路基区段10 m和20 m动态弦峰值小于高低不平顺峰值,其余弦长均大于高低不平顺峰值;随着弦长的增大,动态弦峰值逐渐增大,且增速越来越慢,30 ~ 60 m动态弦峰值相差不大. 从图9(b)看出:对于简支梁区段,30 m和40 m动态弦峰值最大,这是由于这2个弦在高低不平顺1阶主波长32 m处的幅值增益大于1,主波长32 m的幅值被充分放大;而10 m和60 m动态弦峰值小于原始值,因为60 m弦在32 m处的幅值增益小于1,导致60 m动态弦峰值偏小. 综上所述,动态弦峰值与高低不平顺峰值的各百分位值呈线性关系,但由于路基和简支梁区段不同波长的动态幅值分布规律大不相同,因此,拟合系数在两种基础结构的检测结果存在较大差异.
 图 9 动态弦与原始动态高低不平顺峰值的关系Figure 9. Relationship between dynamic chord and original dynamic longitudinal level peak
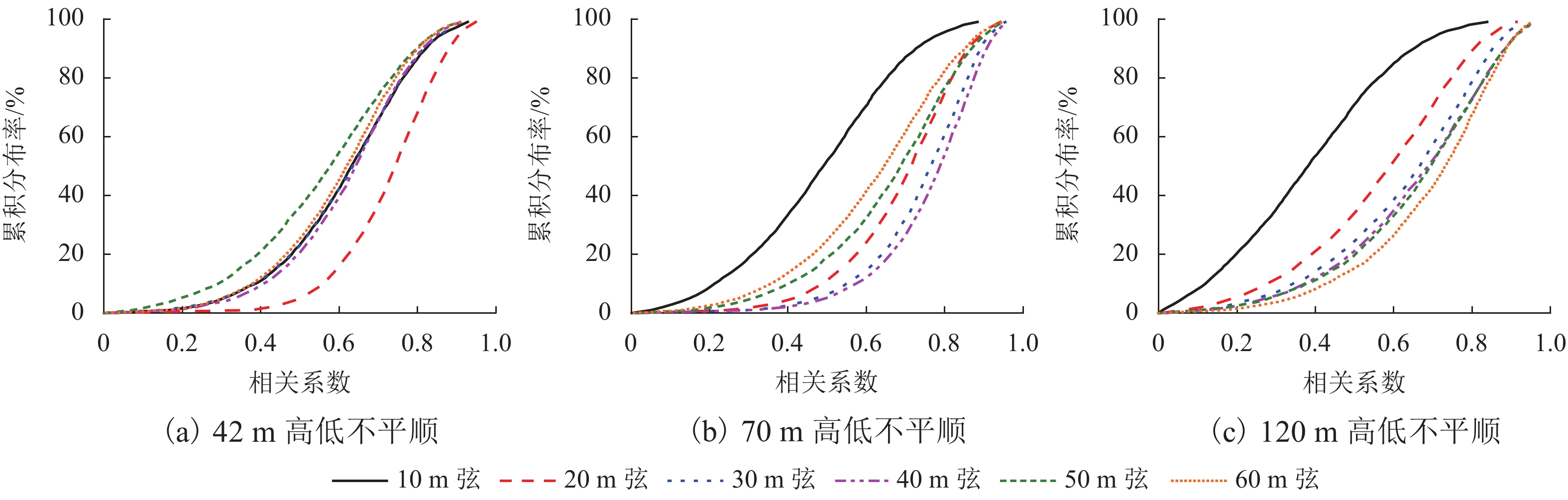
图 9 动态弦与原始动态高低不平顺峰值的关系Figure 9. Relationship between dynamic chord and original dynamic longitudinal level peak基于某高速铁路全线动态检测数据,每200 m作为1个计算单元,逐个计算动态弦测值与动态原始值的相关系数,并作累计分布如图10所示. 可以看出:不同截止波长的相关系数分布规律不同;截止波长为42 m的高低不平顺,20 m动态弦测波形与其相关性最优,50 m动态弦测波形与其相关性最差;截止波长为70 m的高低不平顺,30 m和40 m动态弦测波形与其相关性最优,10 m动态弦测波形与其相关性最差;截止波长为120 m的高低不平顺,30 ~ 60 m动态弦测波形与其相关性比较接近,10 m动态弦测波形与其相关性最差.
 图 10 动态弦与实测动态高低不平顺相关性Figure 10. Correlation between dynamic chord and measured dynamic longitudinal level
图 10 动态弦与实测动态高低不平顺相关性Figure 10. Correlation between dynamic chord and measured dynamic longitudinal level3. 动态弦测法验证及其应用
3.1 路基沉降区段检算
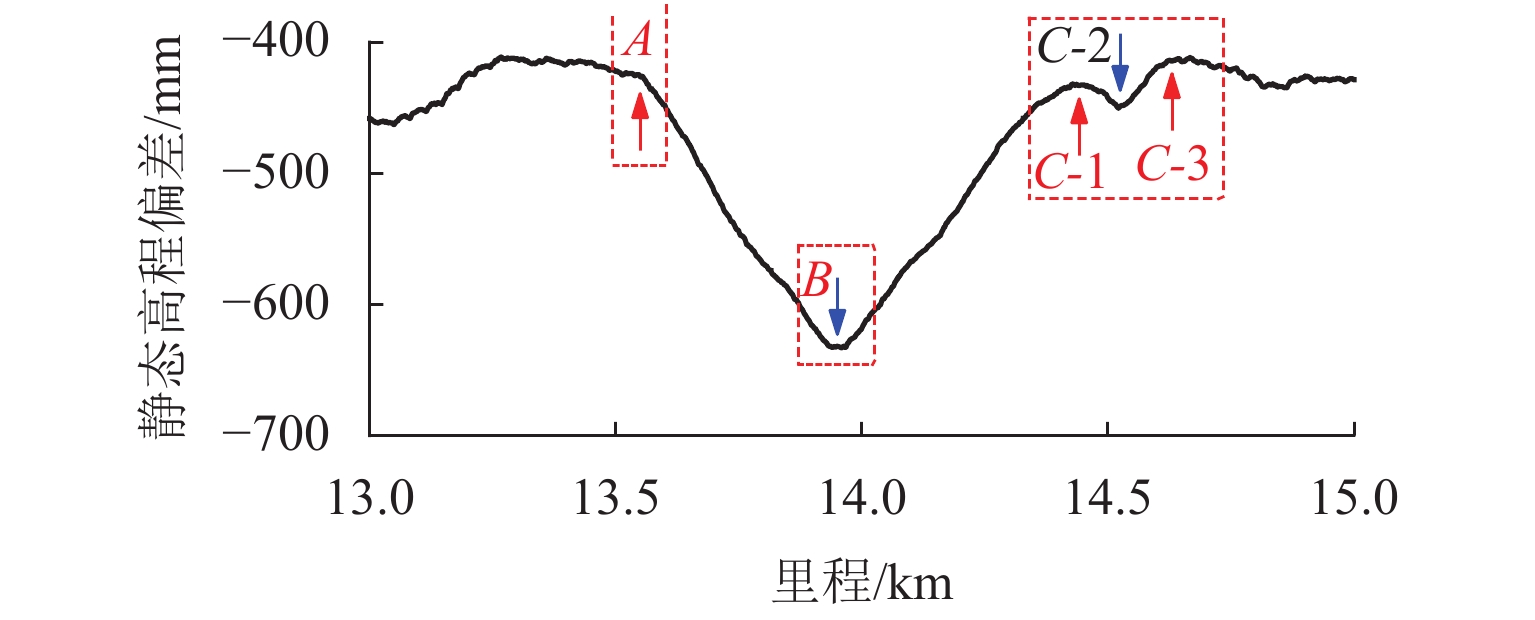
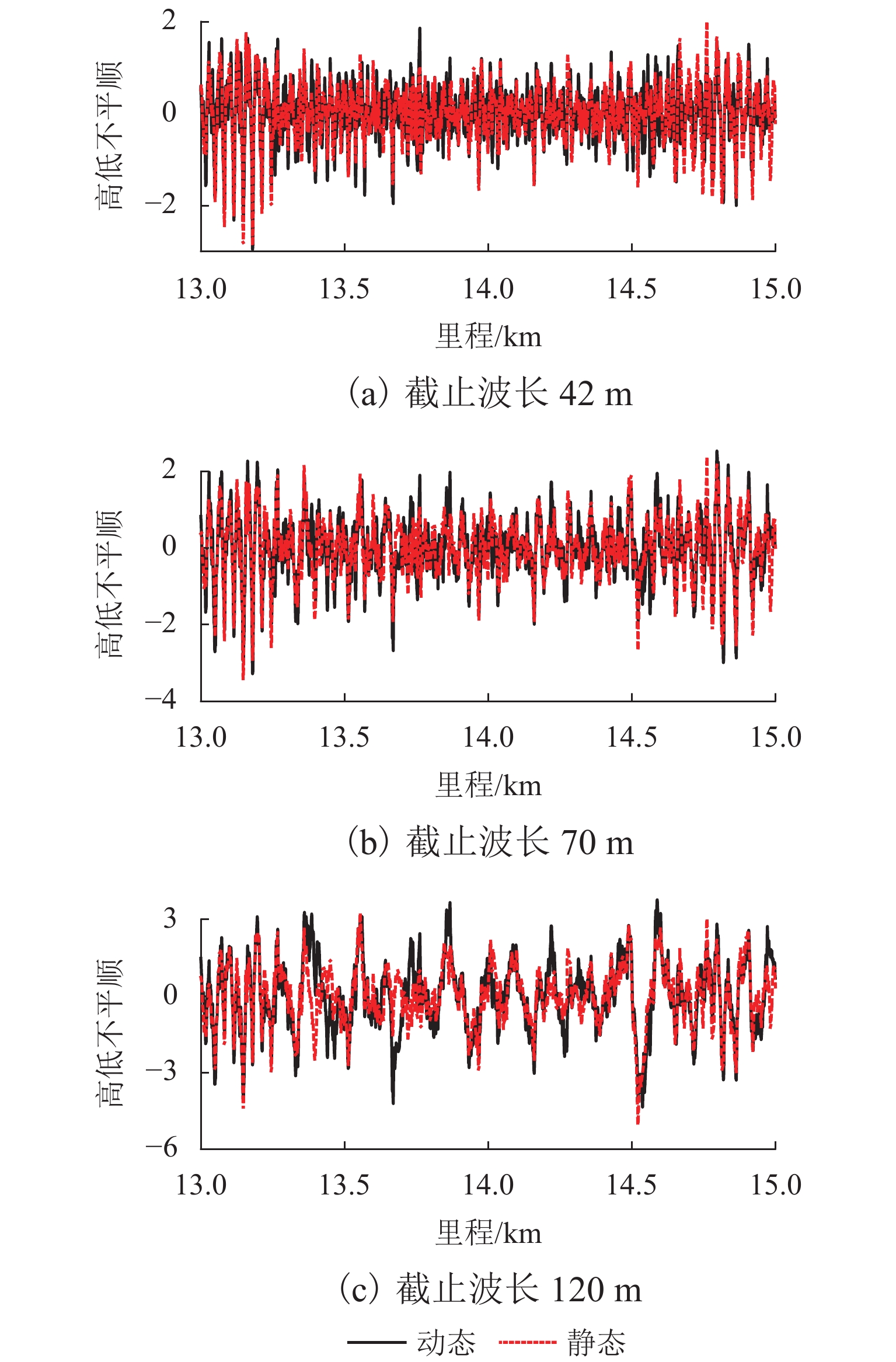
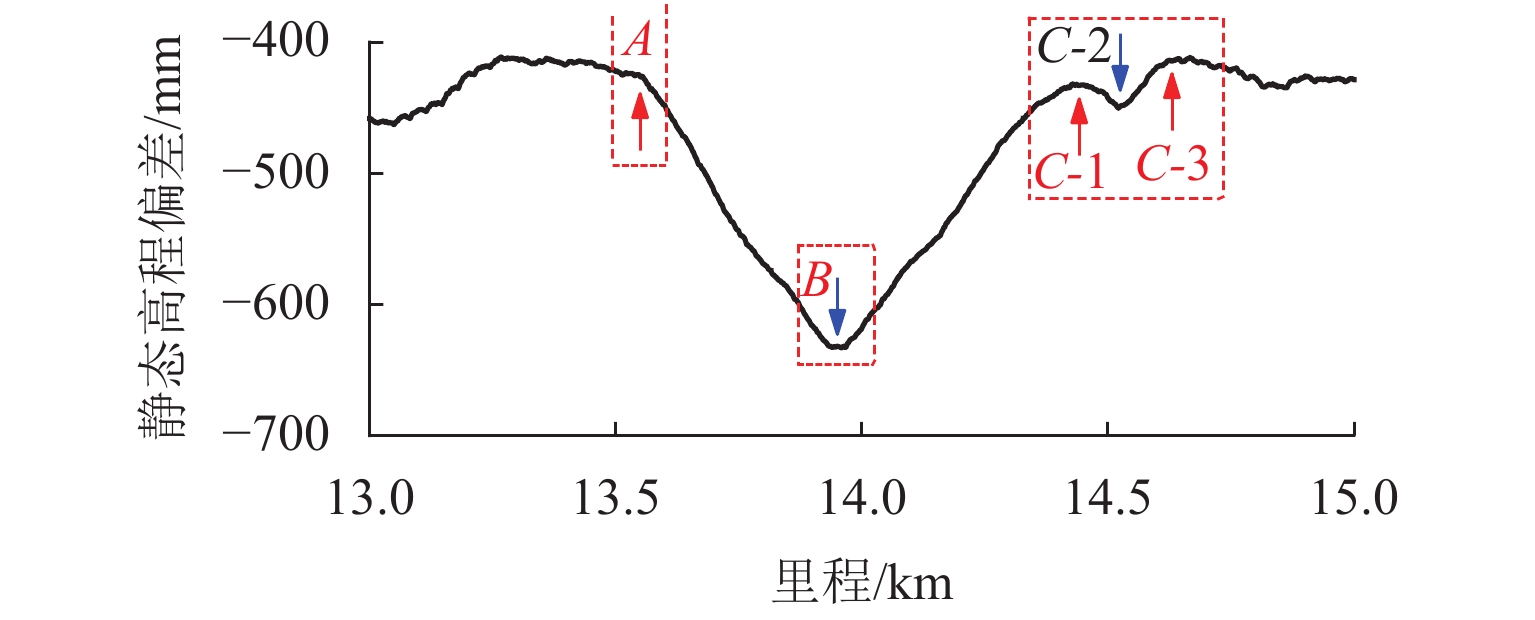
以某高铁线路路基区段检测数据为例,静态高程偏差如图11所示,图中,区段A为沉降起始点,B为沉降点,区段C中,C-2处为沉降点,C-1和C-3处则为两侧的沉降区段起终点. 实际线位与设计线位的最小高程偏差为 −413 mm,最大高程偏差达到 −633 mm,该区段整体沉降较为显著. 分别采用轨检系统截止波长为42、70 m和120 m高通滤波器对静态高程偏差进行滤波,与动态高低不平顺的对比如图12所示. 可以看出:3种截止波长条件下,动、静态数据均吻合很好,验证了该区段动静态检测数据的有效性.
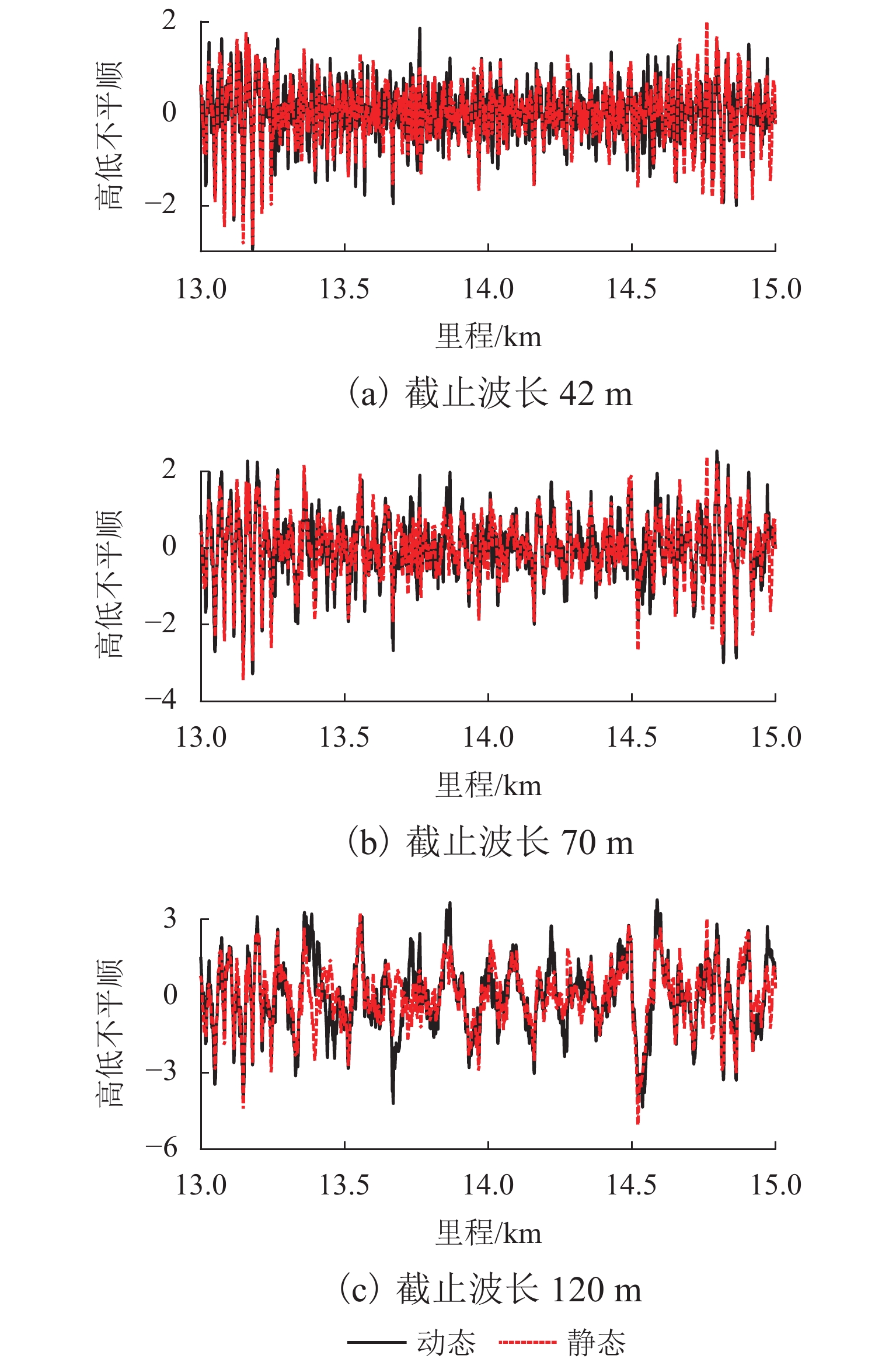
分别将该区段截止波长为42、70 m和120 m的实测动态高低不平顺,按10 ~ 60 m动态弦重新输出. 同时,将实测静态高程偏差同样按10 ~ 60 m中点弦测输出,计算静态高程偏差的弦测值. 各个弦长对应动、静态弦测值如图13所示. 可以看出:当弦长为最短的10 m时,静态高程偏差弦测值与截止波长为42、70 m和120 m动态弦测的波形重合性均非常好. 说明这3种截止波长的动态高低不平顺按10 m弦测重新输出后,均可以准确表达静态的10 m弦测值. 但随着弦长的增大,静态弦测值的长波成分逐渐显现出来,动态弦测值与静态弦测值间在其中3个区段的差距越来越大,分别位于K13 + 500—K13 + 600、K13 + 900—K14 + 000和K14 + 400—K14 + 600,其余区段动静态重合性依旧很好. 从图13中还可以看出:对于上述3个区段,在同一弦长条件下,动态高低不平顺的截止波长越短,它所包含的长波成分就越少,因此,其动态弦测值与静态弦测值间的差距也越大.
 图 13 路基区段动态弦测与静态弦测对比Figure 13. Comparison between dynamic and static chord measurements in subgrade section
图 13 路基区段动态弦测与静态弦测对比Figure 13. Comparison between dynamic and static chord measurements in subgrade section上述3个差异较大区段动、静态弦测值的峰值差如表2所示. 参考《铁路基础设施动态检测——轨道几何检测系统(Q/CR 751—2020)》[19]对中高速轨道几何检测系统检测技术指标的规定,截止波长为42、70、120 m对应的最大允许误差分别为 ±1、±2、±3 mm. 利用该标准评价动态弦测值是否满足精度要求. 截止波长为42 m时,当弦长为20 m时仅有1处超限,弦长大于20 m时3处均超限,因此,最大合理弦长可取为20 m. 截止波长为70 m时,当弦长小于等于30 m时均未超限,弦长大于30 m时均超限,因此,最大合理弦长可取为30 m. 截止波长为120 m时,当弦长小于等于40 m时均未超限,弦长大于40 m时有2处超限,因此,最大合理弦长可取为40 m. 该结论均与2.2节中得到最大合理弦长一致,验证了最大弦长的合理性.
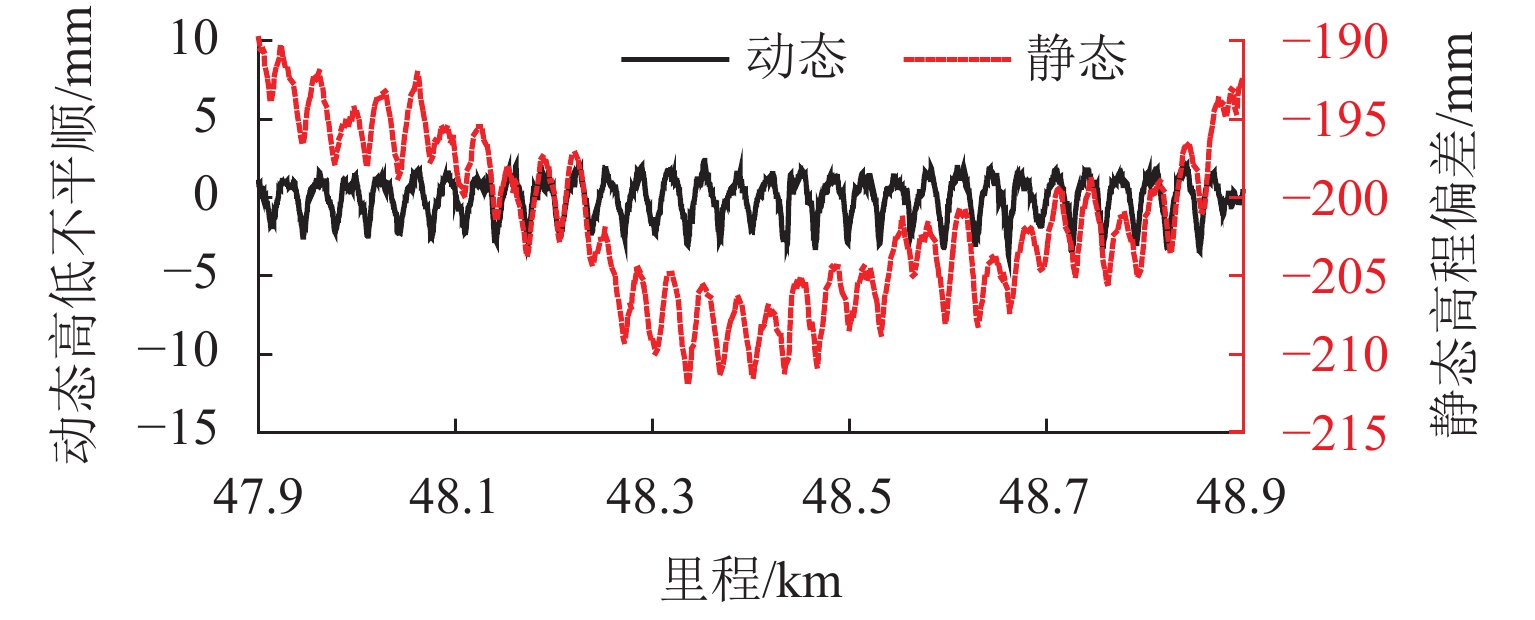
表 2 动态弦测值与静态弦测值峰值差Table 2. Peak value difference between dynamic chord measurement and static chord measurement mm弦长/m 截止波长/m 动、静态弦测值峰值差 A B C-1 C-2 C-3 10 42 0.2 0.3 0.1 0.4 0.1 70 0.2 0.2 0.1 0.3 0.1 120 0.1 0.2 0.1 0.2 0.1 20 42 0.8 0.8 0.4 1.3 0.6 70 0.6 0.7 0.4 0.9 0.5 120 0.4 0.6 0.3 0.6 0.3 30 42 1.7 1.5 0.5 2.7 1.3 70 1.2 1.4 0.4 1.9 0.9 120 0.8 1.2 0.3 1.2 0.6 40 42 2.8 2.7 1.4 4.5 0.9 70 2.1 2.6 1.4 3.3 0.7 120 1.4 2.2 1.2 2.2 0.5 50 42 4.0 4.1 2.0 6.4 3.0 70 3.1 4 1.9 4.8 2.6 120 2.0 3.4 1.7 3.2 1.8 60 42 5.2 5.6 2.9 7.7 4.0 70 4.3 5.6 2.7 6.1 3.6 120 2.9 4.8 2.4 4.0 2.5 尽管弦长超过最大合理弦长时,动态弦测法的精度已经不能达到要求,但仍有实用价值. 可在缺少静态绝对测量数据的条件下,结合动态弦测数据和轨检仪的静态弦测数据识别沉降区段. 对照图13(f),C-1和C-3处静态弦测值明显朝正方向偏离动态弦测值,C-2处明显朝负方向偏离动态弦测值. C处上述动静态弦测值之差的变化趋势与该处高程偏差变化趋势特征一致. 对比区段A、B和C可知,A处静态弦测值明显朝正方向偏离动态弦测值,B处明显朝负方向偏离动态弦测值,C处整体要朝正方向偏离动态弦测值. 并随着弦长的增大偏离越大,弦长达到60 m时最显著. 对照图11发现,A、B和C处整体的高程偏差变化趋势同样与上述特征一致,说明B处是沉降点,A和C-1处是两侧的沉降区段起终点. 综上,静态弦测值明显朝负方向偏离动态弦测值的处所为沉降点,相邻两侧朝正方向偏离动态弦测值的处所为沉降区段起终点.
3.2 简支梁区段检算
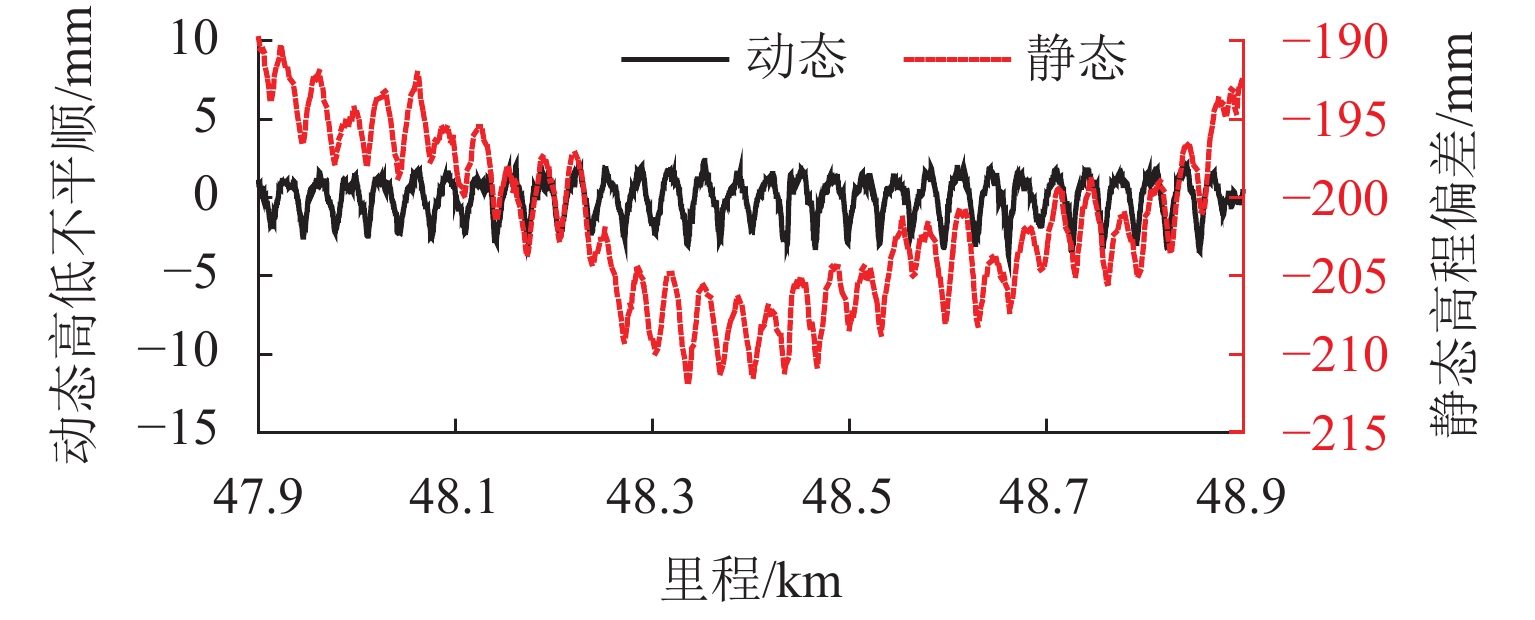
以某高铁线路简支梁区段检测数据为例,动、静检数据对比如图14所示,截止波长为42 m的高低不平顺峰值达到 −3.7 mm,静态高程偏差最小达到−190 mm,最大达到 −212 mm.
图15绘制了该区段动态弦测值与静态高程偏差的弦测值的对比. 弦长由10 m增至60 m,动态弦测值与静态弦测值间波形和幅值的差异越来越大,动、静态弦测值之差的95%分位数分别为0.9、1.4、2.0、2.1、2.2、2.3 mm. 可见对于截止波长为42 m的动态高低不平顺,当弦长增至20 m时,动、静态弦测值之差95%分位数满足小于2 mm要求. 因此,同样可以验证截止波长为42 m的动态弦测法最大合理弦长取20 m.
 图 15 简支梁区段动态弦测与静态弦测对比Figure 15. Comparison between dynamic and static chord measurements in simply supported beam section
图 15 简支梁区段动态弦测与静态弦测对比Figure 15. Comparison between dynamic and static chord measurements in simply supported beam section4. 结 论
1) 由于动态高低和轨向不平顺是相对于惯性基准的偏差数据,而静态高低和轨向不平顺最常用的是中点弦测矢度值,导致二者在结果上存在显著差异. 此外,动态是在有载情况下进行检测,比静态检查贴合实际运行,为避免对现场维修造成困扰,采用动态弦测方法将动态高低和轨向不平顺转换为动态弦测值十分必要.
2) 由动静态检测结果对比得出,42 m和70 m动态高通滤波幅值分别与10 m弦和20 m弦测值变化规律基本对应. 当不平顺波长大于70 m时,120 m动态高通滤波幅值与40 m弦测值变化规律基本对应.
3) 动态弦测值与原始动态不平顺的各百分位值统计上呈线性关系,但不同区段拟合系数存在较大差异;截止波长为42、70、120 m的原始动态不平顺,分别与弦长为20、30 ~ 40、30 ~ 60 m的动态弦测波形相关性最优.
4) 动态检测的截止波长包括42、70、120 m,对应的动态弦测法最大合理弦长分别取为20、30、40 m,通过路基和简支梁区段实测数据验证了动态弦测法的合理性.
5) 基于沉降区段实测数据分析得出,弦长为60 m时,静态弦测值明显朝负方向偏离动态弦测值的处所为沉降点,相邻两侧朝正方向偏离动态弦测值的处所为沉降区段起终点,这可以用于沉降区识别和监控.
致谢:中国铁道科学研究院集团有限公司科技研究开发计划(2020YJ048)项目支持.
-
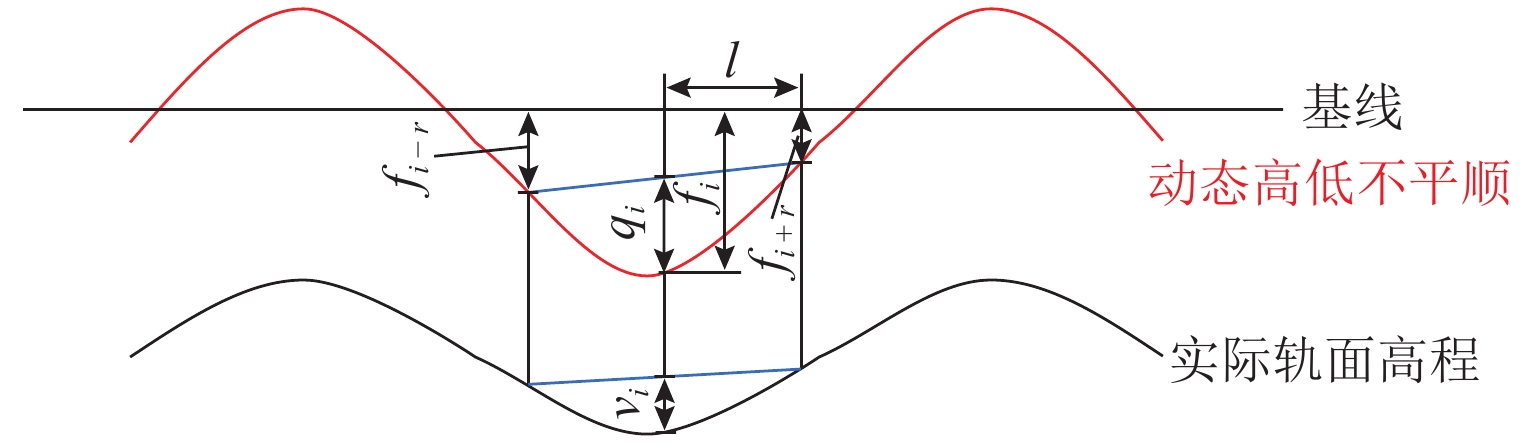
图 2 基于动态弦测法的轨道高低不平顺测量
Figure 2. Track longitudinal level measurements with the dynamic chord method
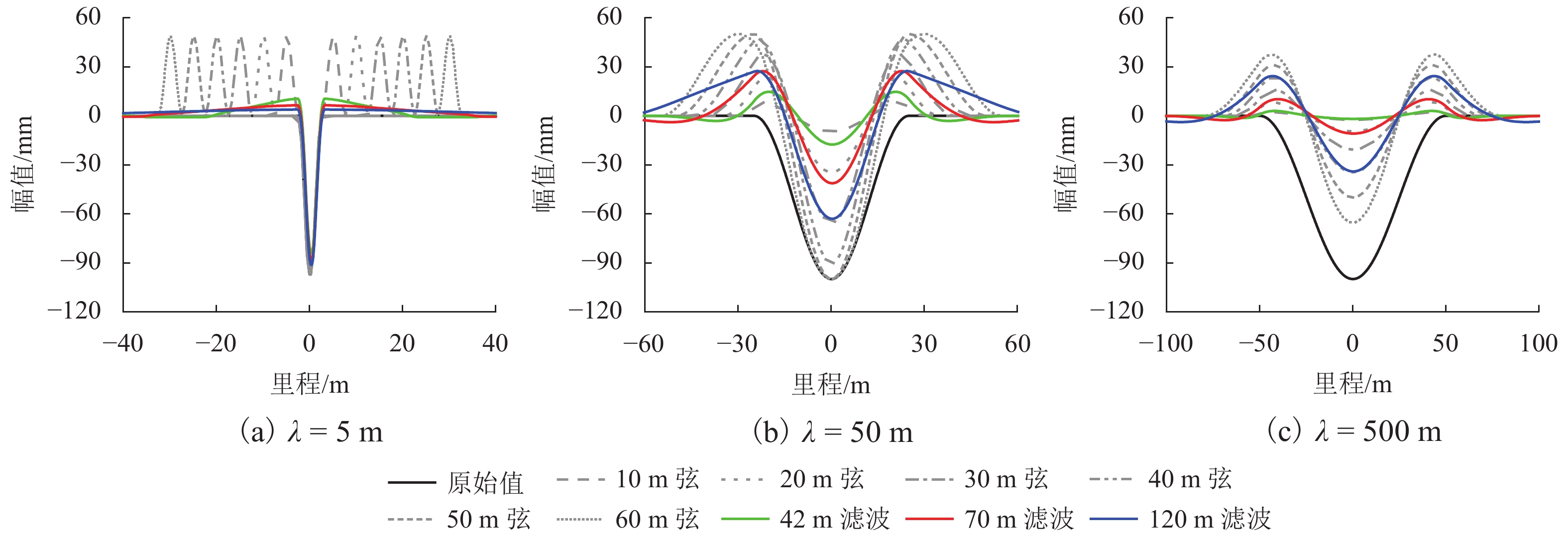
图 5 部分典型余弦型不平顺动、静态波形
Figure 5. Dynamic and static waveforms of some typical cosine irregularities
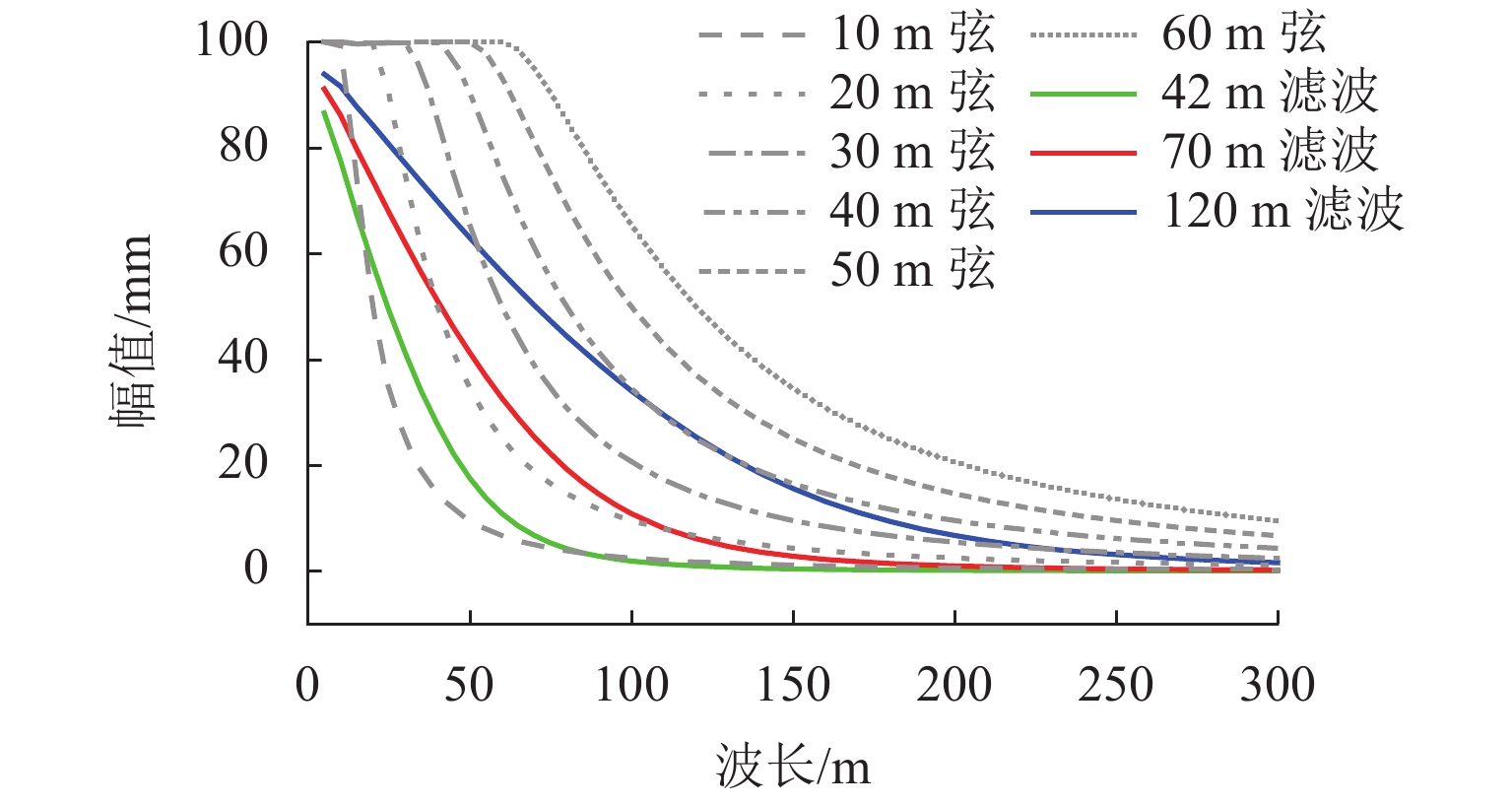
图 6 动、静态不平顺峰值随波长的变化规律
Figure 6. Variation of peak values of dynamic and static irregularity with wavelength
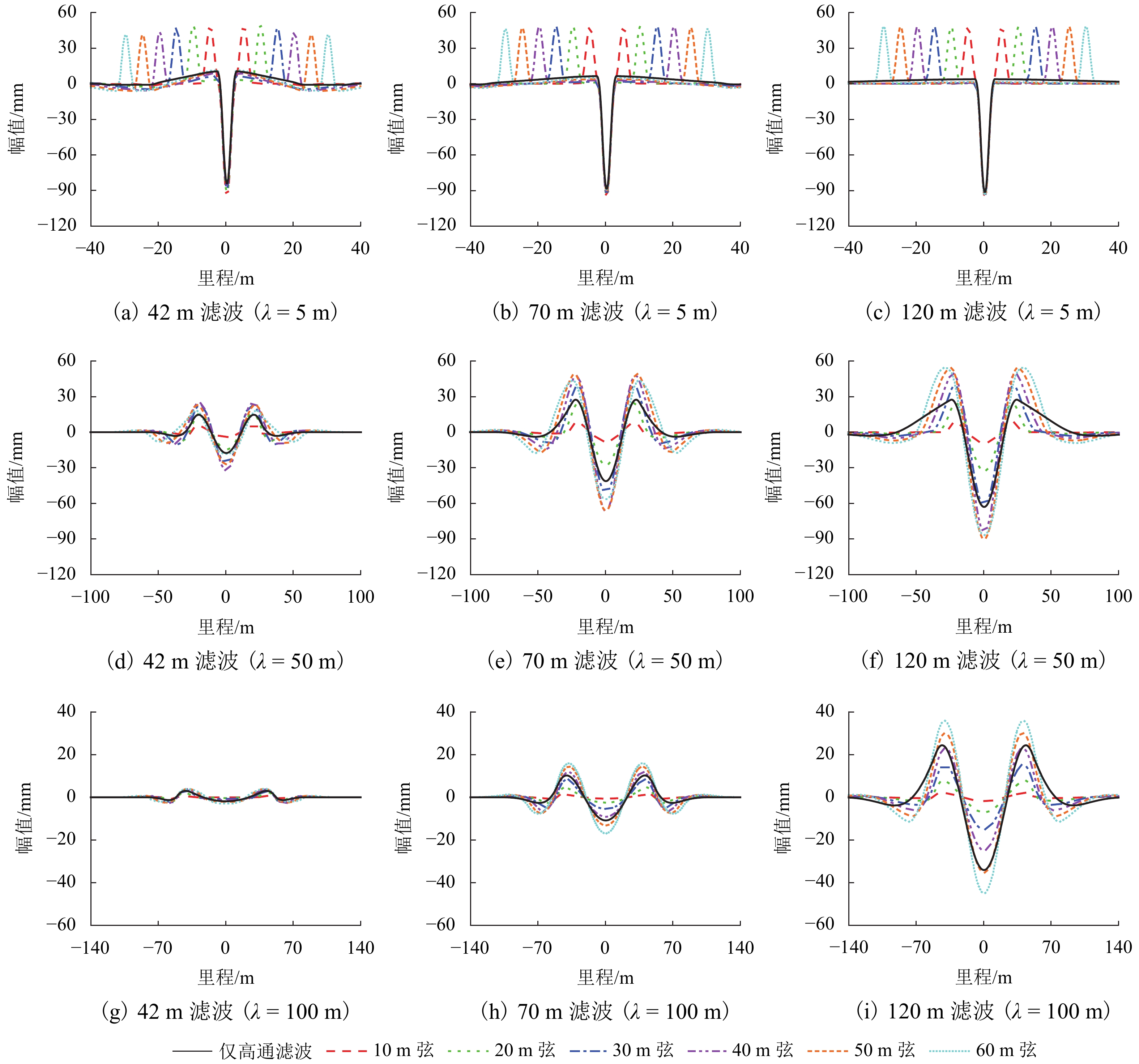
图 7 部分典型余弦型不平顺动态弦对比
Figure 7. Comparison of dynamic chords with some typical cosine irregularities
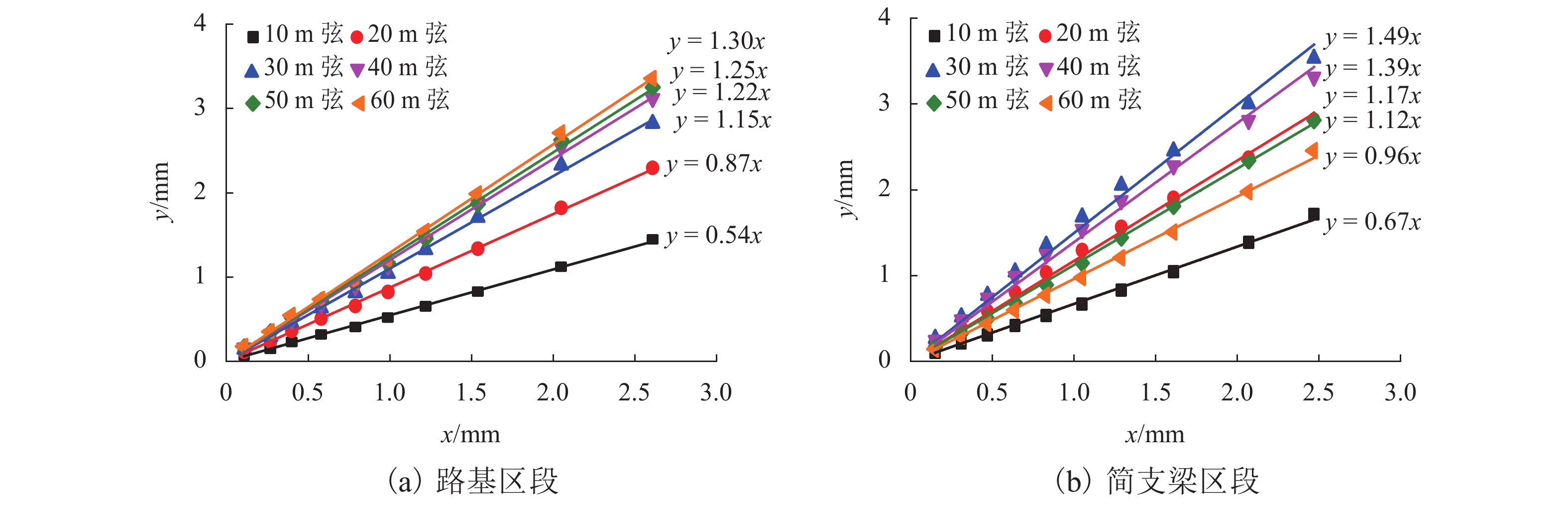
图 9 动态弦与原始动态高低不平顺峰值的关系
Figure 9. Relationship between dynamic chord and original dynamic longitudinal level peak
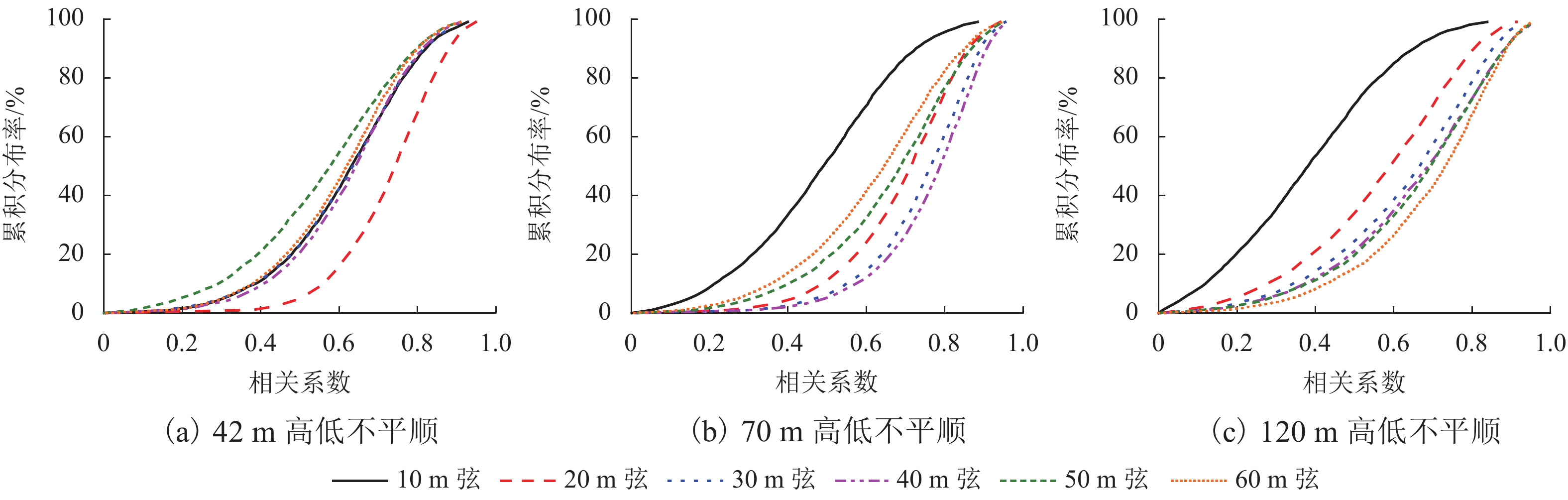
图 10 动态弦与实测动态高低不平顺相关性
Figure 10. Correlation between dynamic chord and measured dynamic longitudinal level
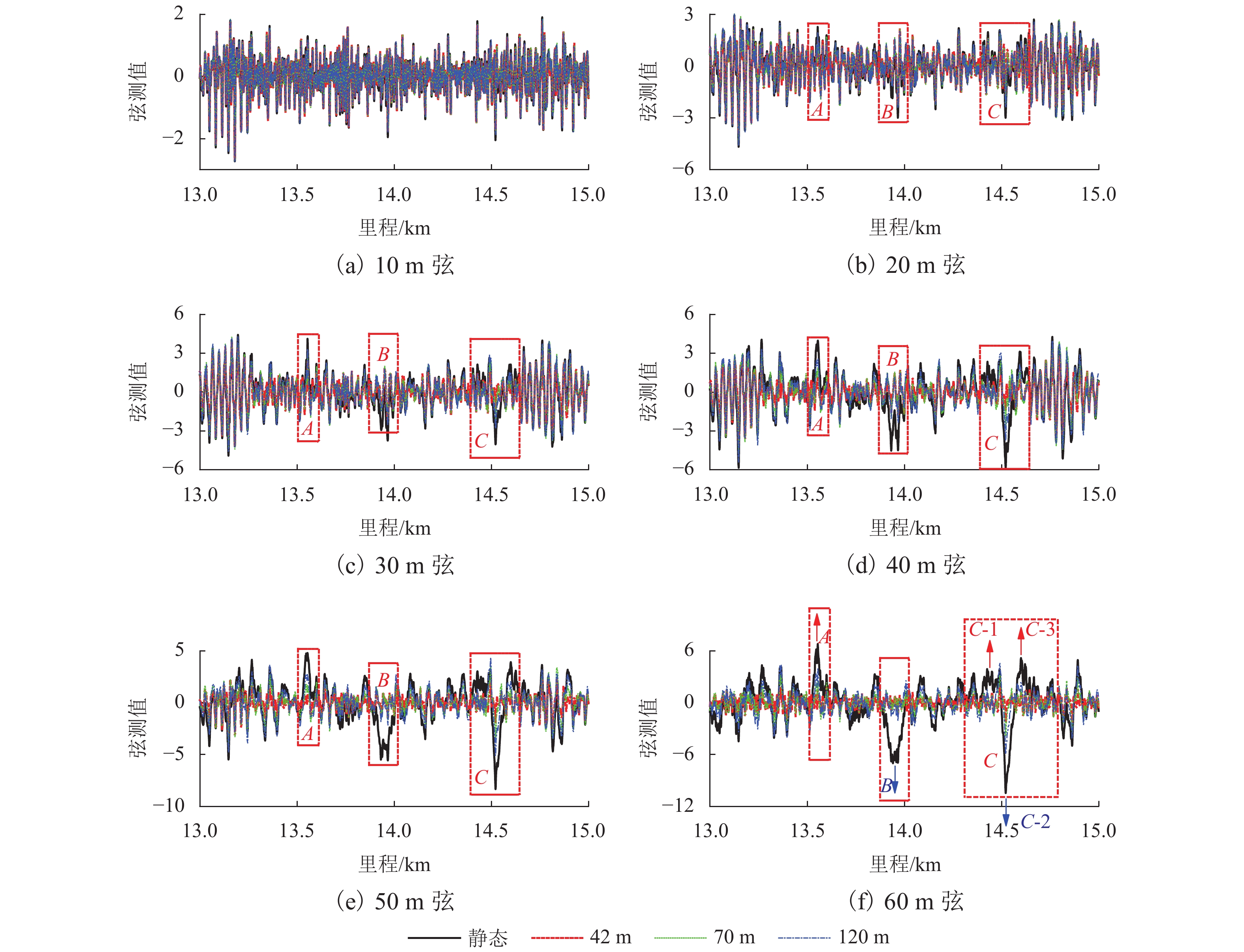
图 13 路基区段动态弦测与静态弦测对比
Figure 13. Comparison between dynamic and static chord measurements in subgrade section
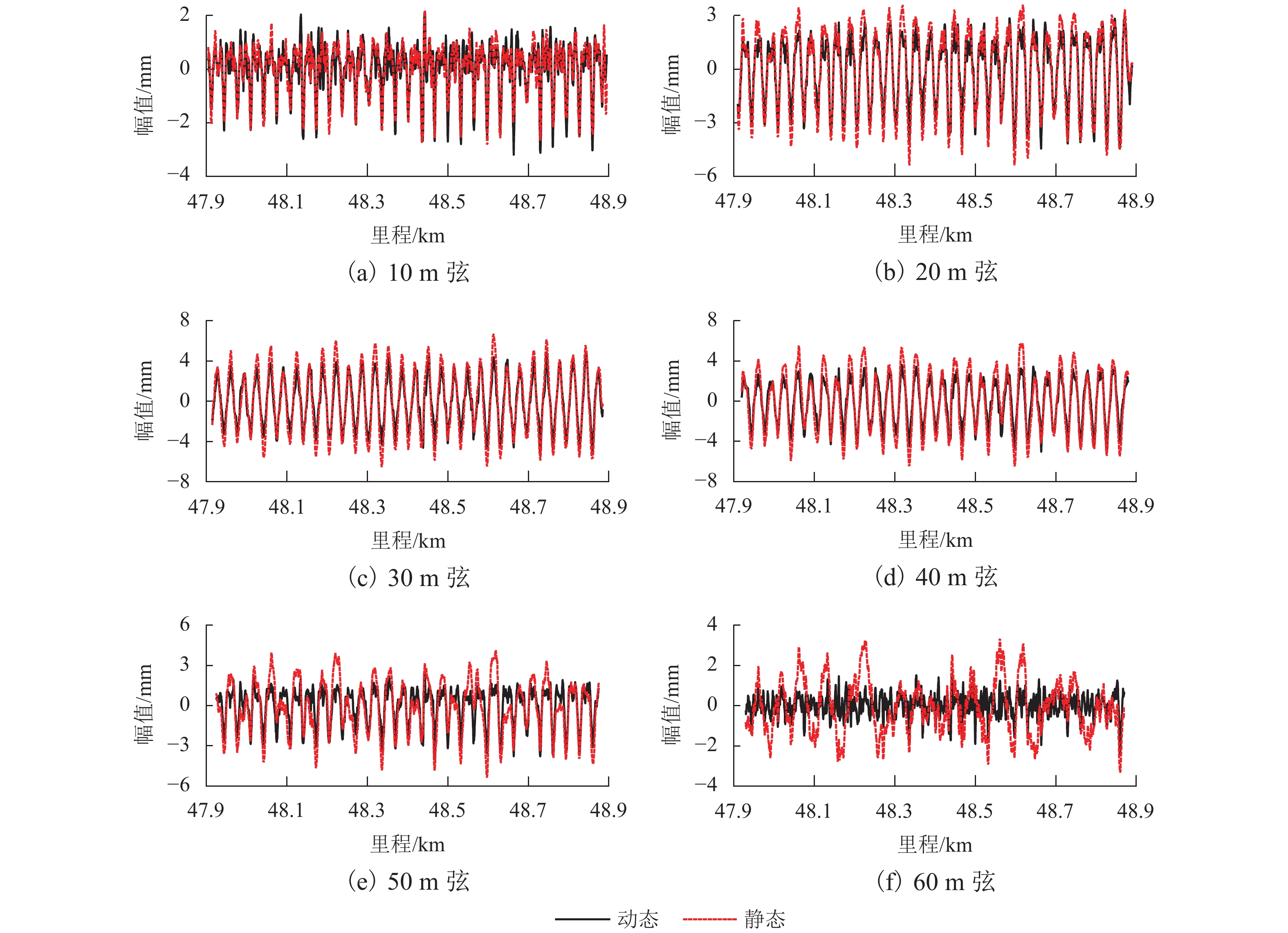
图 15 简支梁区段动态弦测与静态弦测对比
Figure 15. Comparison between dynamic and static chord measurements in simply supported beam section
表 1 动态弦测误差
Table 1. Dynamic chord measurement error
% 截止波长/m 弦长/m 10 20 30 40 50 60 42 5.4 20.0 39.3 58.2 73.2 83.6 70 2.4 7.7 16.6 27.5 39.3 51.0 120 2.2 2.7 6.0 10.4 15.7 21.8  下载: 导出CSV
下载: 导出CSV
表 2 动态弦测值与静态弦测值峰值差
Table 2. Peak value difference between dynamic chord measurement and static chord measurement mm
弦长/m 截止波长/m 动、静态弦测值峰值差 A B C-1 C-2 C-3 10 42 0.2 0.3 0.1 0.4 0.1 70 0.2 0.2 0.1 0.3 0.1 120 0.1 0.2 0.1 0.2 0.1 20 42 0.8 0.8 0.4 1.3 0.6 70 0.6 0.7 0.4 0.9 0.5 120 0.4 0.6 0.3 0.6 0.3 30 42 1.7 1.5 0.5 2.7 1.3 70 1.2 1.4 0.4 1.9 0.9 120 0.8 1.2 0.3 1.2 0.6 40 42 2.8 2.7 1.4 4.5 0.9 70 2.1 2.6 1.4 3.3 0.7 120 1.4 2.2 1.2 2.2 0.5 50 42 4.0 4.1 2.0 6.4 3.0 70 3.1 4 1.9 4.8 2.6 120 2.0 3.4 1.7 3.2 1.8 60 42 5.2 5.6 2.9 7.7 4.0 70 4.3 5.6 2.7 6.1 3.6 120 2.9 4.8 2.4 4.0 2.5
下载: 导出CSV
-
[1] 罗林, 张格明, 吴旺青, 等. 轮轨系统轨道平顺状态的控制[M]. 北京: 中国铁道出版社, 2006: 62-65 [2] 刘学文,杨怀志,杨飞,等. 基于动静态检测数据的轨道精测精调评价技术[J]. 铁道建筑,2019,59(9): 111-115. doi: 10.3969/j.issn.1003-1995.2019.09.27LIU Xuewen, YANG Huaizhi, YANG Fei, et al. Evaluation technology of track precision measurement and fine adjustment based on dynamic and static detection data[J]. Railway Engineering, 2019, 59(9): 111-115. doi: 10.3969/j.issn.1003-1995.2019.09.27 [3] 杨飞,刘丙强,谭社会,等. 高速铁路轨道静态几何不平顺弦测评价标准体系研究[J]. 铁道建筑,2021,61(6): 107-111,120. doi: 10.3969/j.issn.1003-1995.2021.06.24YANG Fei, LIU Bingqiang, TAN Shehui, et al. Research on evaluation standard system of chord measurement for track static geometric irregularity of high speed railway[J]. Railway Engineering, 2021, 61(6): 107-111,120. doi: 10.3969/j.issn.1003-1995.2021.06.24 [4] 田新宇,高亮,杨飞,等. 基于动态短弦的无砟轨道板周期性不平顺管理标准[J]. 中国铁道科学,2020,41(6): 30-38. doi: 10.3969/j.issn.1001-4632.2020.06.04TIAN Xinyu, GAO Liang, YANG Fei, et al. Management standard for cyclic irregularity of ballastless track slab based on dynamic short chord[J]. China Railway Science, 2020, 41(6): 30-38. doi: 10.3969/j.issn.1001-4632.2020.06.04 [5] 张国锋,高晓蓉,王黎,等. 数字逆滤波技术在轨道不平顺检测中的应用[J]. 信号处理,2004,20(6): 667-670. doi: 10.3969/j.issn.1003-0530.2004.06.030ZHANG Guofeng, GAO Xiaorong, WANG Li, et al. The applying of digital- inverse filtering technology in track irregularity inspection[J]. Signal Processing, 2004, 20(6): 667-670. doi: 10.3969/j.issn.1003-0530.2004.06.030 [6] 程樱,许玉德,周宇,等. 三点偏弦法复原轨面不平顺波形的理论及研究[J]. 华东交通大学学报,2011,28(1): 42-46. doi: 10.3969/j.issn.1005-0523.2011.01.009CHENG Ying, XU Yude, ZHOU Yu, et al. Theory and research of asymmetrical chord offset method of restoring a waveform of track irregularity[J]. Journal of East China Jiaotong University, 2011, 28(1): 42-46. doi: 10.3969/j.issn.1005-0523.2011.01.009 [7] 王源,徐金辉,陈嵘,等. 基于中点弦测法的轨道不平顺精确值数学模型研究[J]. 铁道建筑,2015,55(5): 139-143. doi: 10.3969/j.issn.1003-1995.2015.05.35WANG Yuan, XU Jinhui, CHEN Rong, et al. Research on mathematical model of accurate value of track irregularity based on midpoint chord measurement method[J]. Railway Engineering, 2015, 55(5): 139-143. doi: 10.3969/j.issn.1003-1995.2015.05.35 [8] 魏晖,朱洪涛,殷华,等. 高铁轨道平顺性的150 m/300 m校验及其快速测量[J]. 铁道工程学报,2015,32(1): 44-48,54. doi: 10.3969/j.issn.1006-2106.2015.01.009WEI Hui, ZHU Hongtao, YIN Hua, et al. 150 m/300 m check for the irregularities of HSR and its rapid survey[J]. Journal of Railway Engineering Society, 2015, 32(1): 44-48,54. doi: 10.3969/j.issn.1006-2106.2015.01.009 [9] 杨飞,赵文博,高芒芒,等. 运营期高速铁路轨道长波不平顺静态测量方法及控制标准[J]. 中国铁道科学,2020,41(3): 41-49. doi: 10.3969/j.issn.1001-4632.2020.03.05YANG Fei, ZHAO Wenbo, GAO Mangmang, et al. Static measurement method and control standard for long-wave irregularity of high-speed railway track during operation period[J]. China Railway Science, 2020, 41(3): 41-49. doi: 10.3969/j.issn.1001-4632.2020.03.05 [10] 赵文博,杨飞,李国龙,等. 高速铁路轨道平顺性静态长弦测量矢距差法数学模型推导及特性分析[J]. 铁道建筑,2020,60(2): 105-109.ZHAO Wenbo, YANG Fei, LI Guolong, et al. Mathematical model derivation and characteristics analysis of vector distance difference method for static long chord measurement of high speed railway[J]. Railway Engineering, 2020, 60(2): 105-109. [11] 魏世斌,李颖,赵延峰,等. GJ-6型轨道检测系统的设计与研制[J]. 铁道建筑,2012,52(2): 97-100. doi: 10.3969/j.issn.1003-1995.2012.02.030 [12] 魏晖,朱洪涛,吴维军,等. 高速铁路长波不平顺的相对测量整道[J]. 铁道建筑,2014,54(8): 95-98. doi: 10.3969/j.issn.1003-1995.2014.08.29 [13] 魏晖,朱洪涛,赵国堂,等. 基于中点弦测模型的无砟轨道精调量迭代求解[J]. 西南交通大学学报,2015,50(1): 131-136. doi: 10.3969/j.issn.0258-2724.2015.01.019WEI Hui, ZHU Hongtao, ZHAO Guotang, et al. Iterative algorithm of HSR ballastless track realignment calculation based on MCO model[J]. Journal of Southwest Jiaotong University, 2015, 50(1): 131-136. doi: 10.3969/j.issn.0258-2724.2015.01.019 [14] 中华人民共和国铁道部. 高速铁路无砟轨道线路维修规则(试行): TG/GW 115—2012 [S]. 北京: 中国铁道出版社, 2012. [15] 杨飞,吴细水,孙宪夫,等. 钢轨轧制不平顺激扰下的动车组动力响应特性[J]. 西南交通大学学报,2022,57(2): 267-276,294.YANG Fei, WU Xishui, SUN Xianfu, et al. Dynamic response characteristics of EMU under excitation of rail straightening irregularity[J]. Journal of Southwest Jiaotong University, 2022, 57(2): 267-276,294. [16] NAGANUMA Y, KOBAYASHI M, OKUMURA T. Inertial measurement processing techniques for track condition monitoring on Shinkansen commercial trains[J]. Journal of Mechanical Systems for Transportation and Logistics, 2010, 3(1): 315-325. doi: 10.1299/jmtl.3.315 [17] 魏世斌,刘伶萍,刘维桢,等. 提速线路轨道长波不平顺检测技术[J]. 中国铁道科学,2010,31(2): 141-144.WEI Shibin, LIU Lingping, LIU Weizhen, et al. Technology for the measurement of long-wavelength track irregularity of speed-up railway[J]. China Railway Science, 2010, 31(2): 141-144. [18] HAIGERMOSER A, LUBER B, RAUH J, et al. Road and track irregularities: measurement, assessment and simulation[J]. Vehicle System Dynamics, 2015, 53(7): 878-957. doi: 10.1080/00423114.2015.1037312 [19] 中国国家铁路集团有限公司. 铁路基础设施动态检测——轨道几何检测系统: Q/CR 751—2020[S]. 北京: 中国铁道出版社, 2020 期刊类型引用(17)
1. 何庆,马玉松,孙华坤,李晨钟,何红宇,王平. 高速铁路轨道不平顺动静态数据反演研究. 铁道学报. 2025(04): 94-102 .  百度学术
百度学术2. 李再帏,刘晓舟,施洁,尹梓人. 铁路轨道平顺性状态评估及预测研究进展. 振动与冲击. 2025(08): 49-63 . 百度学术3. 陈亮,杨飞,从建力,张晓阳,赵文博,陈嵘. 轨道几何不平顺弦测评估原理及应用. 铁道学报. 2025(05): 111-121 . 百度学术4. 李国龙,孙宪夫,高彦嵩,杨飞,高芒芒,柯在田. 基于实车试验的大跨度桥梁轨道静态长波高低不平顺验收标准验证. 铁道学报. 2024(01): 120-128 . 百度学术5. 曾晨,国巍,刘汉云,余志武,蒋丽忠,国振,谈遂. 非对称弦测法中基于梯度下降的轨道不平顺复原方法(英文). Journal of Central South University. 2024(01): 288-301 . 百度学术6. 王有能,李再帏,张家维,谭社会,时瑾. 千米级大跨度桥上线路动态与静态轨道不平顺的关系. 铁道建筑. 2024(02): 20-24 . 百度学术7. 黄振. 昌九高铁扬子洲赣江公铁合建连续钢桁梁桥设计研究. 铁道标准设计. 2024(04): 88-94+108 . 百度学术8. 张航,卢春房,高亮. 基于波噪比的高速铁路钢轨波磨快速检测方法. 铁道学报. 2024(04): 1-8 . 百度学术9. 陈良江,孙宗磊,严爱国,郭远航,杨得旺. 高速铁路大跨度桥梁轨道静态长波不平顺设计控制参数研究. 铁道学报. 2024(04): 177-183 . 百度学术10. 谭社会,时瑾,张雨潇. 高速铁路竖曲线平顺性优化及工程应用. 铁道工程学报. 2024(01): 13-19 . 百度学术11. 王琰,赵兴,魏世斌,杨飞,魏子龙,从建力,刘晓东,费继友. 基于惯性的轨道平顺性动态弦测法研究. 中国铁道科学. 2024(04): 22-29 . 百度学术12. 王同军,蒋辉,尤明熙,解婉茹,魏子龙,杨飞,李平. 基于模数驱动的高速铁路线路设备状态检测评估技术与实践. 铁道运输与经济. 2024(09): 1-14 . 百度学术13. 程飞,段金超,何越磊,刘彦林. 千米跨度高铁桥梁的轨道不平顺时频特征分析. 铁道标准设计. 2024(12): 21-30 . 百度学术14. 郝晋斐,陈春雷,赵紫珅,贺雨,韩志,王宁. 基于标定线的轨道几何检测系统精度评定方法. 铁道建筑. 2023(08): 49-54 . 百度学术15. 张雨潇,时瑾,倪国华,王英杰. 有砟轨道捣固作业起道方案的综合修正方法. 西南交通大学学报. 2023(06): 1347-1356 .  本站查看
本站查看16. 高策. 高速铁路大跨度桥梁轨道平顺性控制标准研究. 铁路工程技术与经济. 2022(04): 1-4+21 . 百度学术17. 张建,程朝阳,李颖,王凡,郝晋斐,韩志. 轨道几何动静态检测分析. 中国铁路. 2022(08): 180-185 . 百度学术其他类型引用(7)
-





 下载:
下载:





















 下载:
下载:
 百度学术
百度学术
 点击查看大图
点击查看大图
计量
- 文章访问数: 855
- HTML全文浏览量: 483
- PDF下载量: 117
- 被引次数: 24