

Optimal Control for Ride Comfort of Cooperative Adaptive Cruise Control System Under Mixed Traffic Flow
-
摘要:
为提升协同式自适应巡航(cooperative adaptive cruise control,CACC)系统在由自动网联汽车(connected automated vehicle,CAV)和人工驾驶汽车(manual vehicle,MV)构成的混行交通流下的驾乘舒适性,提出考虑驾乘舒适性的双层控制策略(dual-layer control strategy considering ride comfort,RC-DCS). 上层控制器从宏观角度出发,采用两状态空间模型调整跟车间距及车速,并利用代价函数改善车队的整体稳定性和舒适性;下层控制器从微观角度出发,优化单车的油门和制动踏板切换逻辑,稳定实际加速度输出,降低车辆频繁加减速引起的自身俯仰. 试验结果表明:RC-DCS在跟随MV工况中跟车间距误差和加速度分别降低了72.44%和24.87%;在MV插入CACC车队工况中通过增大跟车时距0.4 s以减少加速度波动;在跟车、紧急制动、旁车切入3种典型工况中,单车加速度标准差分别降低了9.6%、10.4%、2.9%.
Abstract:To improve the ride comfort of cooperative adaptive cruise control (CACC) system under the mixed traffic flow that comprises connected automated vehicle (CAV) and manual vehicle (MV), a dual-layer control strategy considering ride comfort (RC-DCS) is proposed. From a macro perspective, the upper controller adopts a two-state space model to adjust the following distance and speed, and improve the overall stability and comfort of the fleet by the use of the cost function. From a microscopic perspective, the lower controller optimizes the logic of switching the throttle and brake pedal of a single vehicle, and stabilizes its actual acceleration output, thereby reducing the pitch caused by frequent acceleration and deceleration. The experimental results show that, the RC-DCS can reduce the following distance error and acceleration by 72.44% and 24.87% respectively in following MV condition. In the condition of MV cut-in CACC fleet, the acceleration fluctuation is reduced by increasing the following headway of 0.4 s. In the three typical conditions of vehicle following, emergency braking and cut-in, the standard deviation of the single-vehicle acceleration is reduced by 9.6%, 10.4% and 2.9%, respectively.
-
随着车路协同技术的不断发展,传统道路交通系统中车辆原本无法显现的自组织、网络化、非线性、强耦合等特性逐渐凸显出来. 交通系统属性的变化使得传统研究方法难以适用. 同时,自动驾驶技术的不断进步一并催生出网联自动车辆(connected automated vehicle,CAV)与人工驾驶车辆(manual vehicle,MV)长期共存的交通新态势[1],这种交通组织成分的变化对模型复杂度提出更高要求. 车辆不再有主次之分,所有车辆全部为分散目标,交通系统需被作为开放的复杂系统进行研究. 在CAV与MV组成的混行交通流新常态下,协同自适应巡航控制(cooperative adaptive cruise control,CACC)作为CAV的关键功能辅助,安全性和稳定性研究取得系列成果,但驾乘舒适性研究明显不足. 因此,有必要对混行这一新环境下CACC系统的驾乘舒适性进行新的探索.
CACC急加速或急减速会引起生理上的不舒适,跟车间距过近或跟车间距误差过大会造成心理上的不舒适. 对于舒适度的判断准则大体一致,包括:急动度(加速度变化率)越小越好[2];加速度越小越好[3];对于给定加速度,急动度越小越舒适[4];由车体横向震动引起的约为0.2 Hz低频加速度易诱发晕车[5-7]. 当前,对CAV驾乘舒适性影响的研究还不全面. Elbanhawi等[8]总结了CAV路径规划的舒适性,强调了CAV队列行驶舒适性的重要性;Milakis等[9]将驾乘舒适性划分为CAV的一级影响. 从宏观角度来看,驾乘舒适性受加速度、速度波动影响,与交通流稳定性密切相关[10],因速度、加速度波动而偏离稳态后,会产生不舒适感. 因此,CAV交通流稳定性优化成为提升驾乘舒适性的重要手段,但这方面研究仍存在较大空白[8-11]. 在纯CAV环境下,对跟车模型进行稳定性分析是提升舒适性的常见思路[12-15]. Zhou等[16]提出具有局部稳定性、多准则队列稳定性的串行分布式模型预测控制(model predictive control,MPC)方法,但不完全适用于混行环境. 鉴于车辆动力学、执行机构的差异,仅从交通流稳定性考虑难以保证单车舒适性最优,还需从微观角度进行进一步优化[17-18].
因此,本文以CACC系统的运行舒适性为研究目标,设计考虑驾乘舒适性的双层控制策略(dual-layer control strategy considering ride comfort,RC-DCS). 上层控制器从宏观角度出发,根据MV行车状态,以舒适性为优化目标,及时调整车队整体的跟车间距和速度;下层控制器则从微观角度出发,根据车队中不同车辆的动力学情况,利用油门、制动踏板切换策略优化车辆动力输出,保证每辆车达到最优行车状态.
1. CACC系统运行舒适度优化模型
1.1 CACC系统舒适度优化框架模型
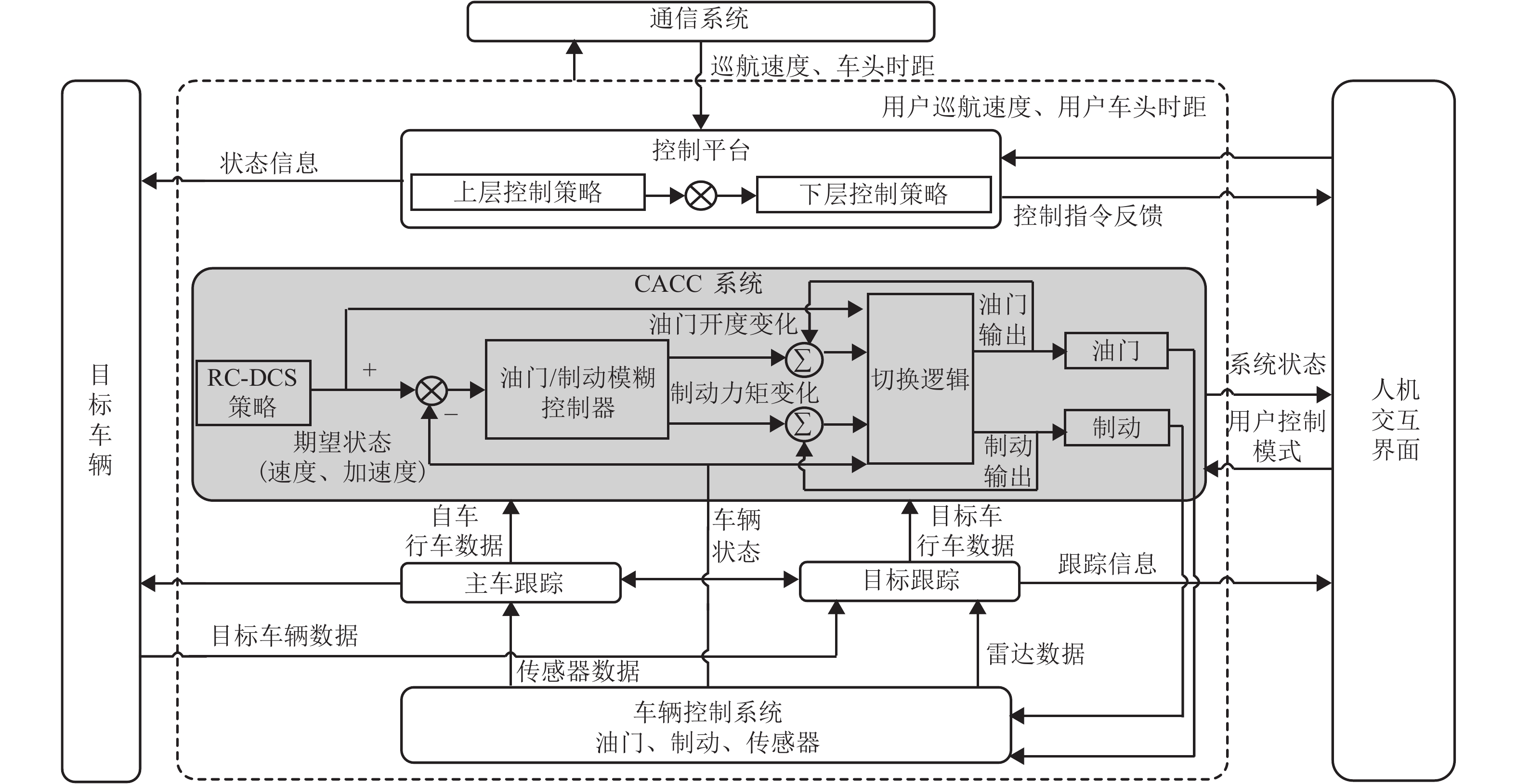
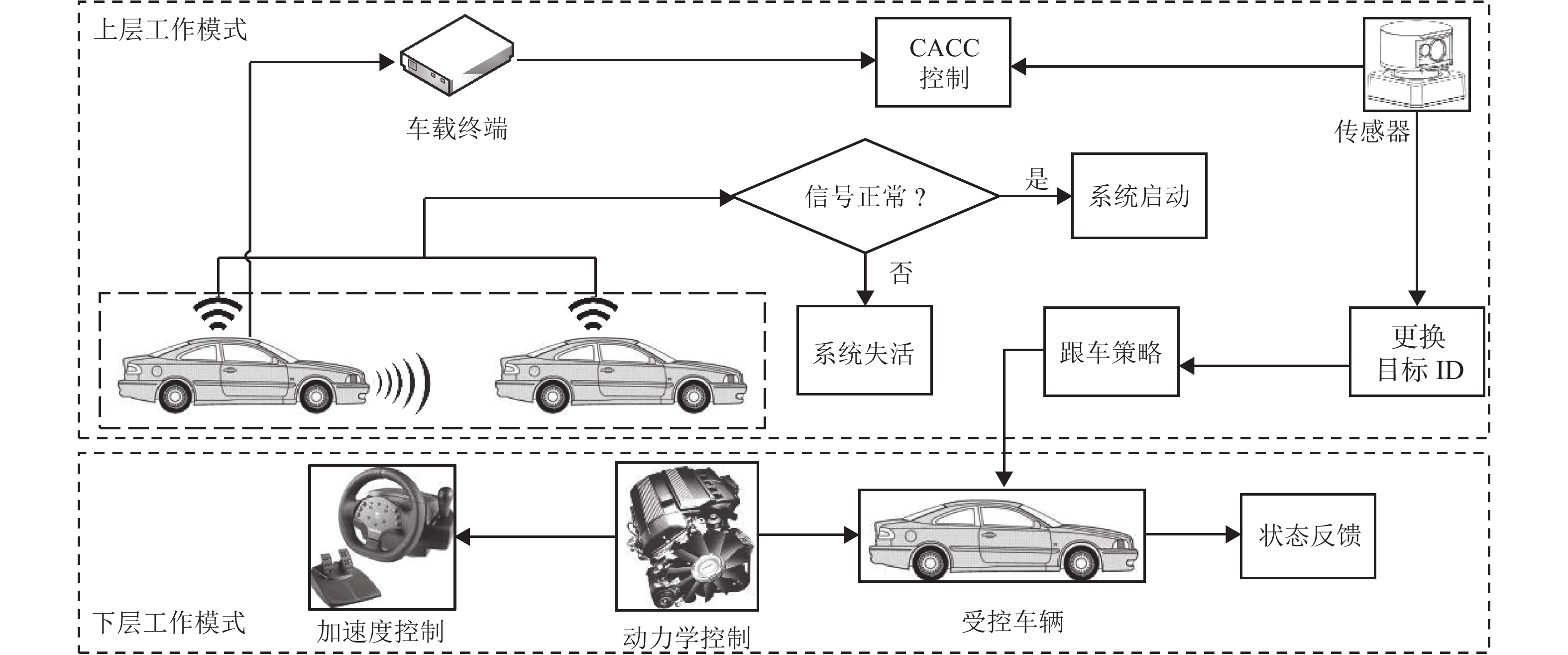
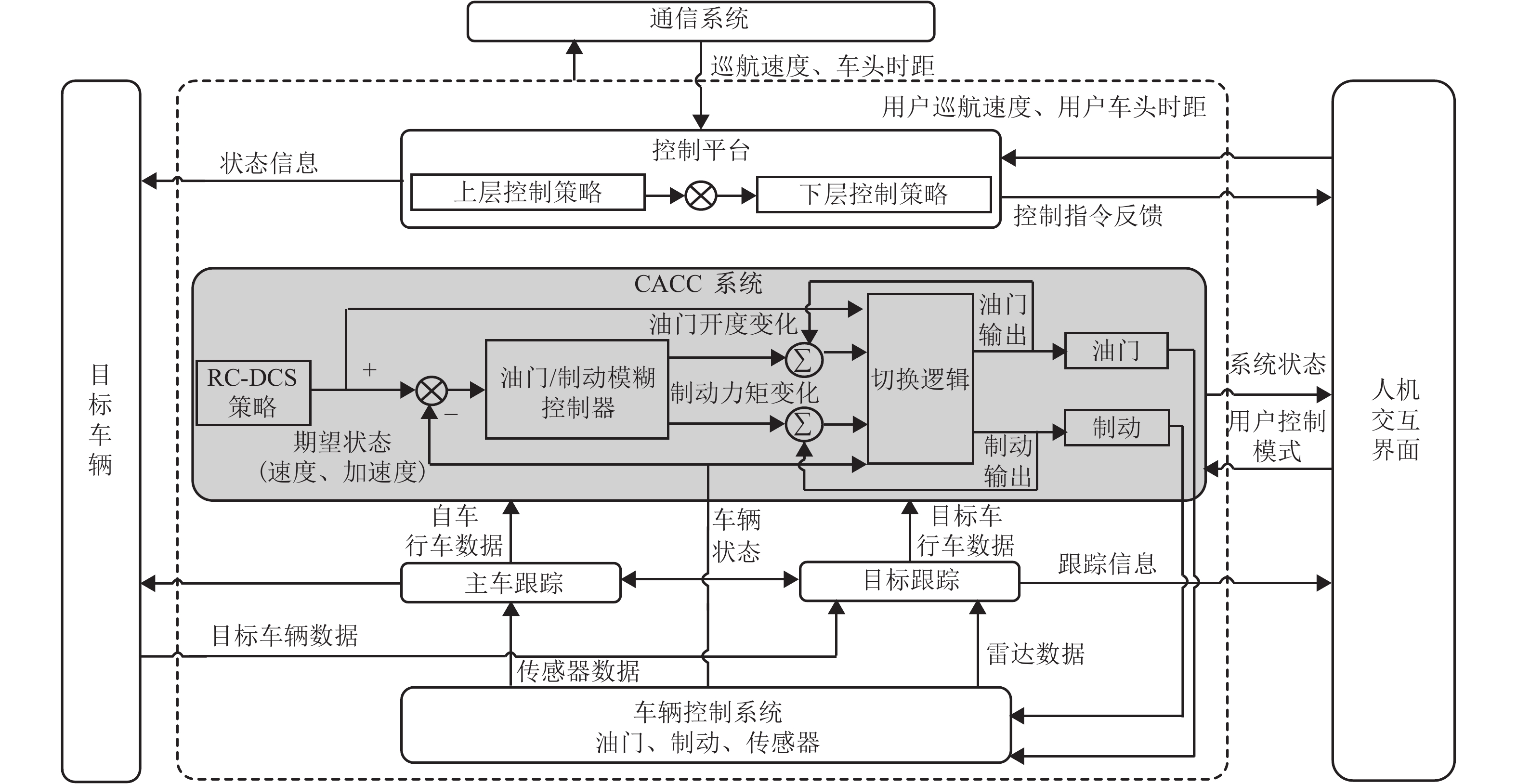
CACC系统包括车辆控制系统、通信系统和人机交互界面,其系统架构如图1所示. 人机交互界面一方面为驾驶员提供跟车基本信息和自车控制信息,另一方面可以控制和调整CACC系统的运行状态. 车辆控制系统采用由上层控制器和下层控制器组成的双层控制结构,上层控制器负责队列的跟随控制,协同车辆间的跟车间距、跟车速度,下层控制器负责车辆的加速度控制. 由于系统配备了跟踪算法[19],因此根据驾驶员设定的跟车时距,融合传感器获取的数据,通过无线通信接收前车终端传输的速度、加速度信息计算出期望速度和加速度,然后将控制结果反馈至上层目标控制函数,根据当前状态生成相应加速或者制动命令并传输至车辆平台,从而使车辆按预设的状态行驶.
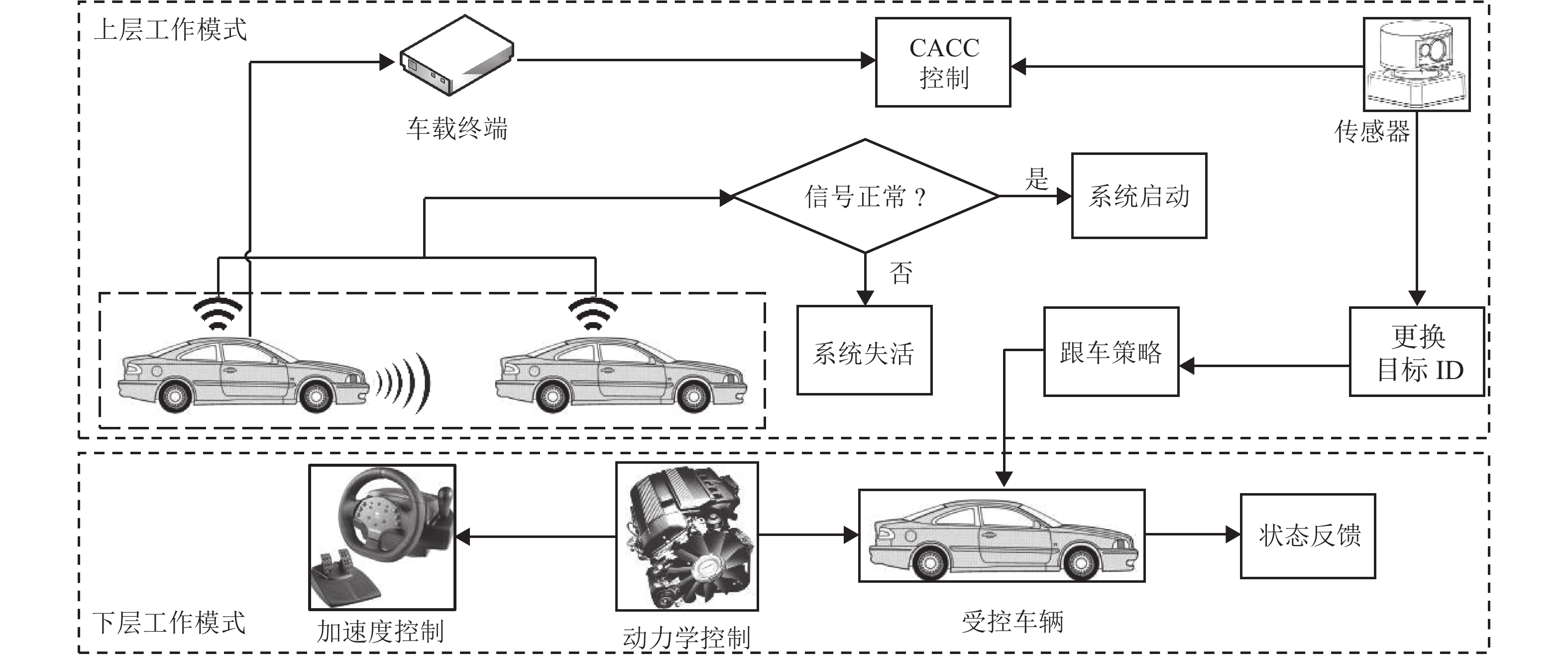
CACC系统的工作模式如图2所示. 当CACC系统启用时,系统会根据控制策略设定队列车辆的运行方式,同时上层控制系统会判断与自车直接通信的车辆身份标识号(identity document,ID)和与测距传感器检测到的车辆ID是否相同. 若检测到目标变更,控制器会重新获取新目标信息,根据跟车策略重新计算跟车间距和期望加速度,并交由下层控制器执行,同时对上层结果进行反馈. 当传输信号故障时,系统的工作状态会变为失活,提醒驾驶员进行人工操作.
1.2 RC-DCS控制策略
1.2.1 上层控制策略设计
首先建立CACC控制系统的纵向动力学模型,如式(1)~(5)所示.
Te=E(ne,α), (1) {Te,act=1τe+1,J˙ne=Te,act−Tp, (2) {Tp=CT(λ)n2e,Tt=RT(λ)Tp,λ=nerigi0v, (3) igi0ηTtr=δM˙v+12CaSρv2+Mgf+Mgθ, (4) δ=1+IMr2, (5) 式(1)~(5)中:Te为发动机扭矩;E(•)为发动机静态特性的非线性函数;ne为发动机转速;α为油门开度;Te,act为发动机实际扭矩;τe为发动机时间常数;J为飞轮惯性;Tp为液力变矩器的泵扭矩;CT(•)为变矩器的容量系数;λ为变矩器的转速比;Tt为变矩器的涡轮扭矩[20];RT(•)为变矩器的扭矩比;ig为变速箱传动比;i0为终传动比;r为车轮半径;v为后车车速;η为传动系统效率;M为车辆质量;g为重力加速度;Ca为空气阻力系数;S为前横截面积;ρ为空气密度;f为滚动阻力系数;θ为道路坡度;δ为集中系数;I为四车轮惯性矩.
上层控制器采用由与领航车相对速度和跟车间距误差表征的车辆纵向动力学和车辆间纵向动力学的两状态空间模型,可由式(6)、(7)计算求得.
vrel=vp−v, (6) {de=d−ddes,ddes=hvp+doff, (7) h=h0−cvvrel+kvvp, (8) 式(6)~(8)中:vrel为领航车与后车相对速度;vp为领航车速度;de为跟车间距误差;d为实际跟车间距;ddes为期望跟车间距;doff为补偿距离[21-22],根据经验取值为1.5 m;h为可变车头时距;h0为标称车头时距,取值2.5;cv、kv为大于0的常数.
车间距纵向动力学表示为
˙d=vrel. (9) 由式(1)~(8)得到式(10).
{˙de=vrel−h0ap+cvvrelap−kvvpap,˙vrel=Γ(v)+χ+ap+gδθ,Γ(v)=1δM(12CaSρv2+Mgf), (10) 式中:ap为领航车加速度;Γ(v)为关于车速v的非线性函数;χ为与Tt具有非线性关系的中间控制变量,如式(11)所示.
χ=igi0ηMrTt. (11) 将χ作为控制输入,则式(10)应视为与时间无关的模型. 在保证车辆跟踪稳定性和舒适性基础上得到考虑前车车速的跟随控制器,如式(12)所示.
{χ=Γ(v)+ξqpϕς+ξqpv−pq+2rel(1+kσmdkm−1e),ς=de+1σdkme+1ξvpqrel, (12) 式中:p、q、k、m为满足1<pq<2和1<pq<km的正整数;ς为与de、vrel相关的修正系数;ϕ、ξ、σ为分布于 [0,1] 的随机数.
在上述算法基础上,总体控制策略为
P=χiM+ρSf(v22+τevai)+fm, (13) 式中:χi为第i辆车的控制输入;ai为第i辆车的加速度;fm为机械阻力.
显然,控制策略是线性反馈,可以实现将车辆动力学线性化,并通过车辆动力学排除一些特征参数简化系统模型.
行驶过程中,考虑第i辆车与前车的通信时延,得到式(14)所示的CACC系统状态空间方程.
{˙xi(t)=Sixi(t)+Diχi(t)+Giai−1(t−τr),yi(t)=(xTi(t),ai−1)T, (14) 式中:t为时间;τr为与前车间的通信时延;xi=(de,i,vrel,i,ai)T为第i辆车的系统状态量,其中,de,i、vrel,i分别为第i辆车的跟车间距误差、相对速度;yi(t)为第i辆车的系统输出量;Si、Di、Gi分别为第i辆车的系统系数矩阵,如式(16)所示.
{Si=[01−h000−100−1/τe],Di=(0,0,1/τe)T,Gi=(0,1,0)T. (15) 对于跟随车辆,在保证尽可能小的速度误差和距离误差的前提下,定义了代价函数L来优化行驶的稳定性和舒适性,如式(16)所示.
L=12∫∞0(xTiW1+χiW2)dt, (16) 式中:W1和W2为给定权重.
第i辆车的加速度控制量为
ades,i=−k1de,i+k2vrel,i−k3ai+1, (17) 式中:k1、k2、k3为常数.
可通过求解反馈增益K=(k1,k2,k3)T使代价函数达到最优.
当自车行驶速度小于巡航速度时,W1 = (0.01, 1.00, 0.10)T,W2 = 8,K = (0.03, 0.39, −0.22)T;行驶速度等于巡航速度时,W1 = (0.40, 1.00, 0.10)T,W2 = 1,K =(0.63, 0.96, −0.43)T;行驶速度大于巡航速度时,W1 = (0.60, 1.00, 0.15)T,W2 = 2,K = (0.93, 1.20, −0.68)T.
1.2.2 下层控制策略设计
在混行环境中,当CACC车辆跟随MV时,仅依靠上层跟车模型无法很好满足乘坐舒适性,分析发现车辆起步时存在振幅过大、波动频率过高的问题,为此设计基于模糊理论的下层控制器优化加速度输出,利用模糊理论优化油门、制动踏板切换逻辑,保证CACC车辆退化为ACC车辆后的舒适性.
针对油门踏板设计了模糊逻辑控制器. 以速度误差ev=vdes−v,加速度误差ea=ades−a为输入,油门开度变化量Δα为输出,其中,a为车辆加速度;油门开度以百分比表示. 第n个离散时间步长的油门开度为
α(n)=Δα(n)+α(n−1). (18) 油门踏板输入和输出变量模糊化. 输入、输出变量均采用5个模糊子集:{负大(NB),负小(NS),零(ZO),正小(PS),正大(PB)},其中,ev、ea和Δα的论域分别为 [−10.0,10.0]、[−5,5] 和 [−0.60,0.60].
采用Mandani作为模糊推理系统,制定如表1所示控制规则表. 采用重心法计算去模糊输出为
表 1 控制规则表Table 1. Control rulesev ea NB NS ZO PS PB NB NB NB NS NS ZO NS NB NS NS ZO PS ZO NS NS ZO PS PS PS NS ZO PS PS PB PB ZO PS PS PB PB U=∑Nj=1ωjuj∑Nj=1ωj, (19) 式中:N为模糊规则的数量;uj为模糊规则库的第j个输出;ωj为uj的权重.
根据驾驶规则,制动踏板基本操作逻辑与油门踏板相反,因此其模糊控制器与油门踏板相同. 唯一区别是制动控制器输出制动力矩变化量与油门控制器的输出相反,如式(20)所示,则当前制动力矩百分比如式(21)所示.
Δb(n)=−Δα(n), (20) b(n)=Δb(n)+b(n−1), (21) 式中:b(n)、Δb(n)分别为在第n个离散时间步长的制动百分比、制动百分比变化量.
由于油门开度和制动力矩是两个物理意义、标度不同的变量[23],通过百分比表示可以将两个输出值统一到 [0,1],从而将制动控制器与油门控制器简化为一个控制器.
为保证油门和制动控制器协调工作,设计切换控制器如下:1) 避免两踏板同时工作;2) 踩下油门踏板前需抬起制动踏板,反之亦然;3) 避免频繁切换油门和制动. 因此,采集车辆速度误差、当前油门和制动状态、油门和制动的输入等信息,由切换控制器决策两者输出. 如表2所示,以ev的取值范围为判断标准将输出方案分为减速区域、保持区域、加速区域. 当前状态分为油门激活(throttle activation,TA)、制动激活(brake activation,BA)、油门和制动均为未激活(not activation,NA),输出方案分为油门控制(throttle control,TC)、制动控制(brake control,BC)、无操作(not operation,NO).
表 2 切换控制策略Table 2. Switching control strategies当前
状态输出方案 减速区域
(ev < −0.1)保持区域
(−0.1 ≤ ev ≤ 0.1)加速区域
(ev > 0.1)TA TC TC TC BA BC BC BC NA BC NO TC 保持区域作用是为避免控制器在油门和制动踏板之间频繁切换,其输出方案始终保持当前状态. 以0.01作为判断当前油门或制动踏板状态的阈值,若油门开度值大于0.01,则油门激活;若两者均未大于0.01,则当前状态为无操作. 切换逻辑伪代码如下.
输入:速度误差ev;油门开度α;制动力矩百分比b;油门输入Iα;制动输入Ib
过程:
1. function getStep(){
2. if (ev < −0.1)
3. { if (α > 0.01)
4. { return 1;}
5. else { return 2;}
6. }
7. if (ev > 0.1)
8. { if (b > 0.01)
9. { return 2;}
10. else { return 1;}
11. }
12. if (ev ≥ −0.1) & (ev ≤ 0.1)
13. { if (b > 0.01)
14. { return 2;}
15. else
16. { if (α > 0.01)
17. { return 1;}
18. else { return 3;}
19. }
20. }
21.}
22. function gotoStep(step){
23. switch (step)
24. { case 1: Oα=Iα, Ob=0,
25. break;
26. case 2: Oα=0, Ob=Ib,
27. break;
28. case 3: Oα=Iα, Ob=0,
29. break;}
30. }
输出: 油门输出Oα;制动输出Ob
2. 试验验证
2.1 试验说明
以MPC策略[16]为对比试验,在保证MPC策略和RC-DCS控制策略均处于最佳工作状态下,设计CACC系统驾乘舒适性优化控制试验. 试验采用PreScan和MATLAB/Simulink联合仿真,建立由搭载CACC系统车辆组成的车队,车辆间借助V2X传感器实现专用短程通信(dedicated short range communication,DSRC)功能获取周围车辆行车信息,利用技术自主传感器(technology independent sensor,TIS)模拟激光雷达获取前车距离、相对车速、方位角,若前方车辆为MV,后车退化为ACC车辆,通过激光雷达进行巡航控制. 为保证控制策略在直道和弯道的适用性,后车跟随MV时根据自身横摆角速度判断是否行驶在弯道路段,融合长距和短距雷达获取的前车数据,以达到稳定跟踪MV的目的.
2.2 试验结果及分析
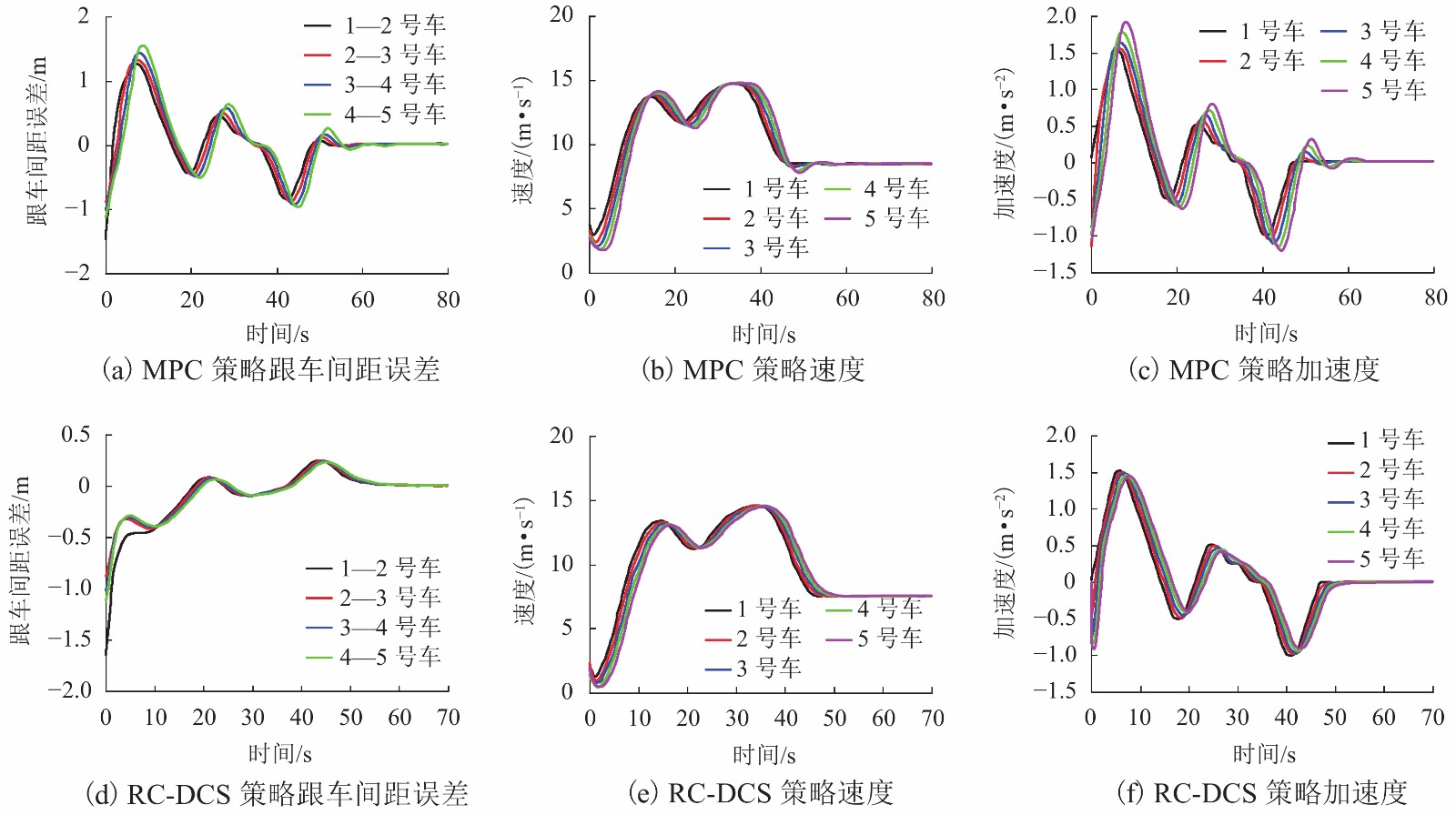
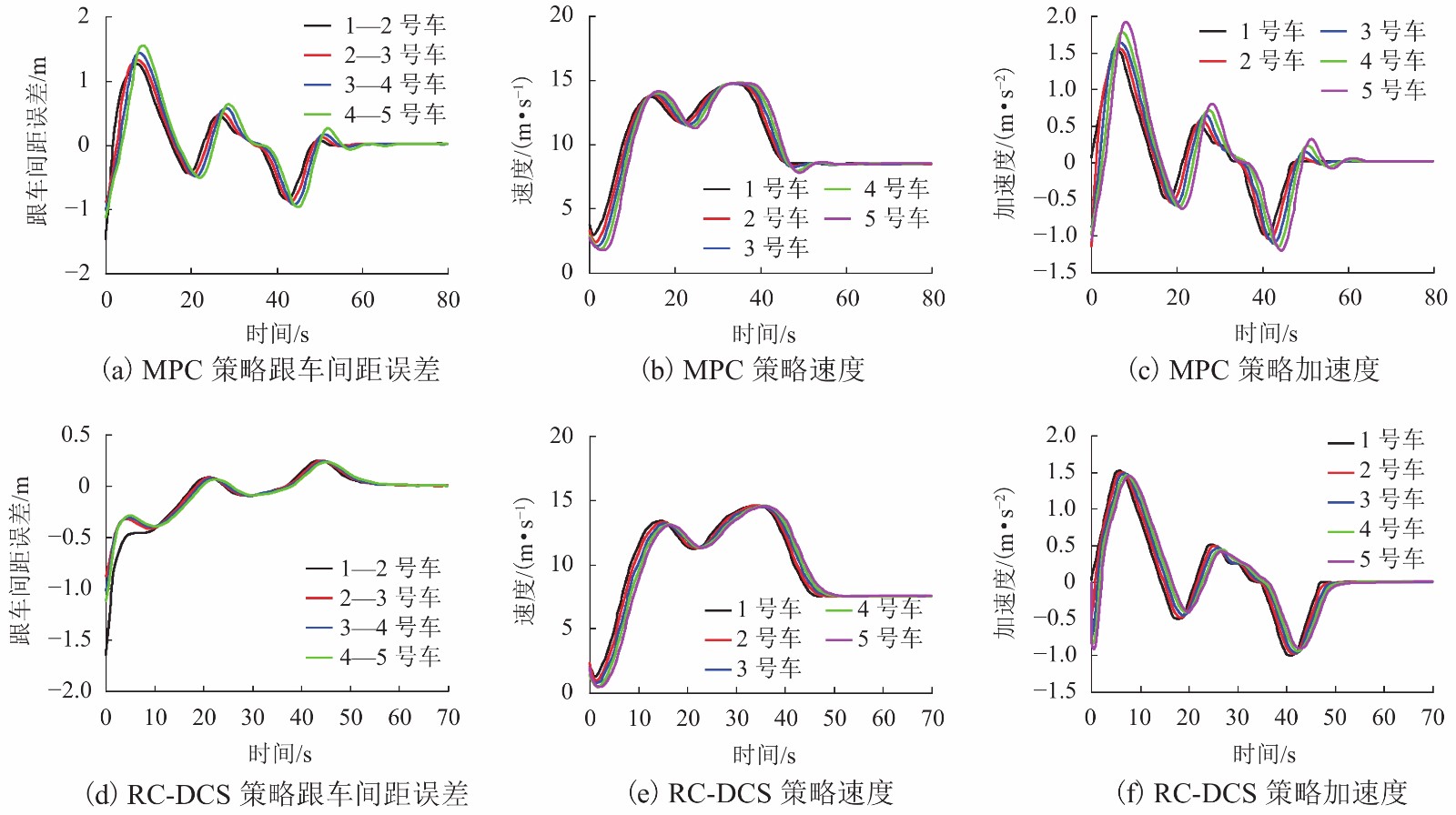
图3为跟随MV工况下5辆CACC车辆跟车间距误差、速度、加速度对比曲线. 图(a)、(d)中:1—2号车表示第1辆车和第2辆车间的跟车间距,其余类推.
由图3可知:MPC策略最大跟车间距误差1.56 m、最大加速度1.93 m/s2;相同工况下,RC-DCS策略最大跟车间距误差0.43 m、最大加速度1.45 m/s2,实现CACC系统精准跟车控制. 相较于MPC策略,RC-DCS跟车间距误差、最大加速度分别降低72.44%、24.87%,且曲线波动幅度更小. 可见,RC-DCS参数波动较小,在CACC车队的总体运行效率更佳,具有更为稳定、舒适的驾乘体验.
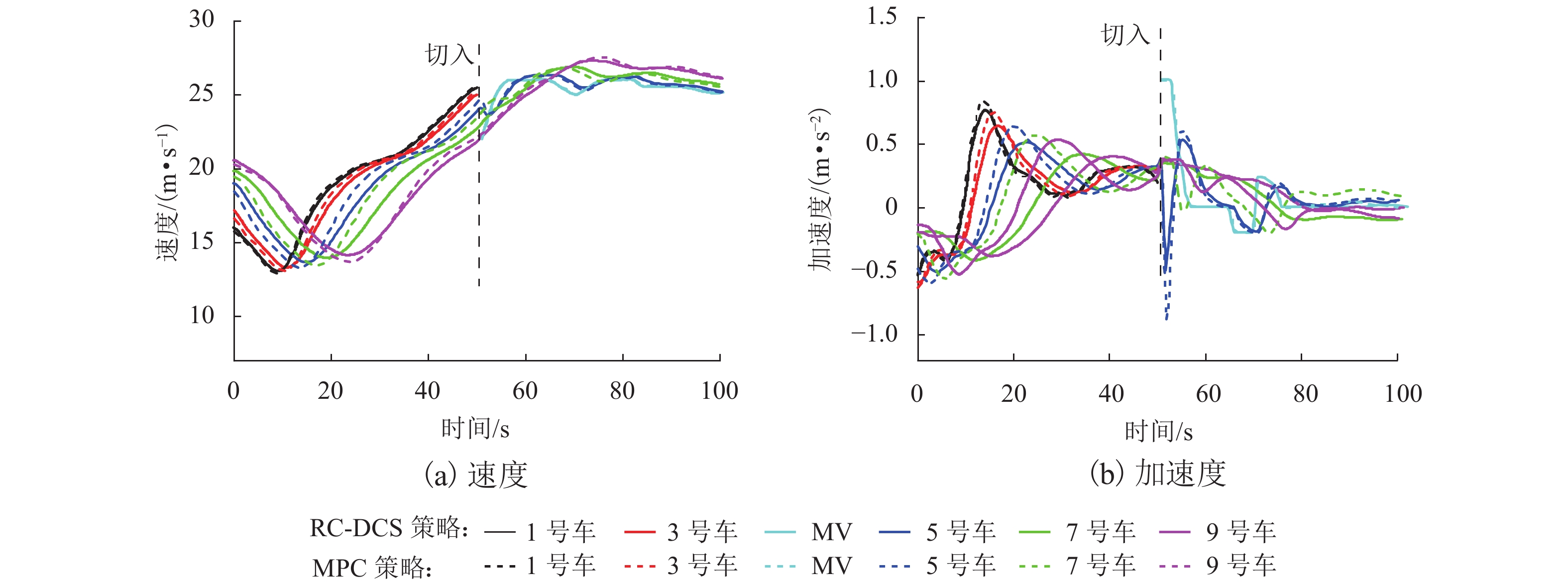
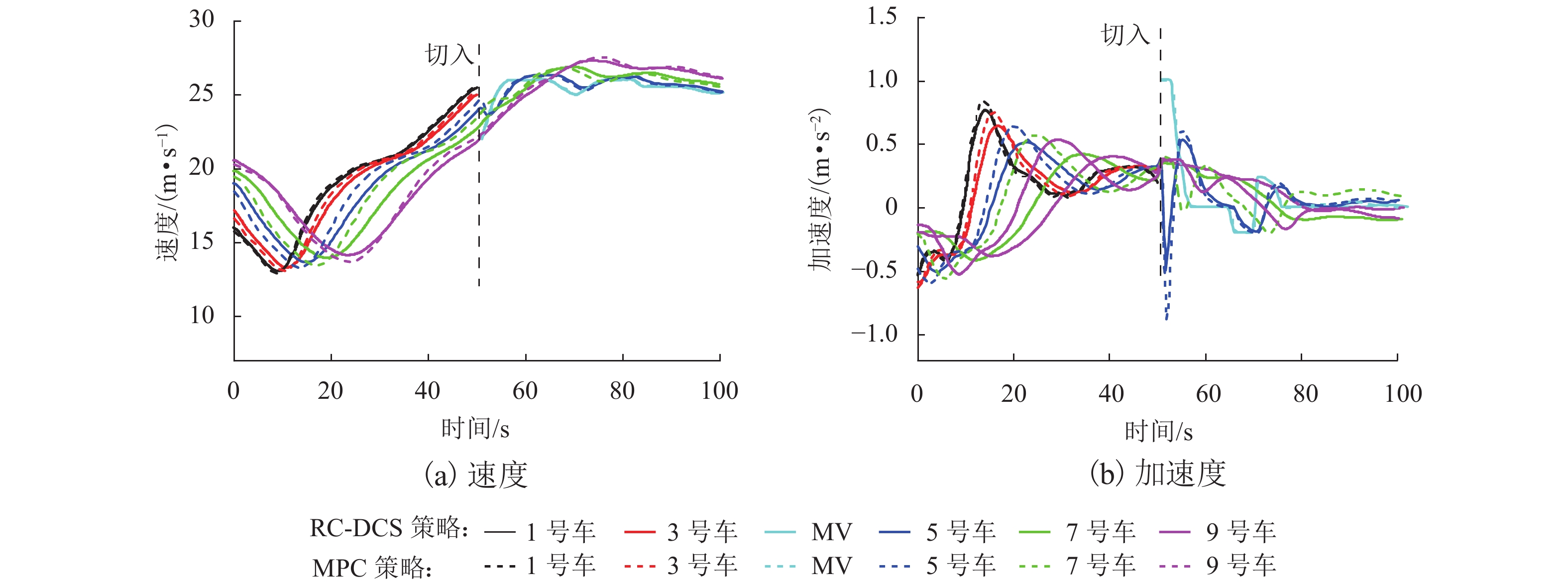
为进一步验证RC-DCS策略在MV插入CACC车队工况的整体行驶效果,设计包含10辆CACC车辆的车队,MV在50 s时从3号车后方切入,试验结果如图4所示.
由图4(a)看出:相较于MPC策略,由于RC-DCS策略采用可变车头时距,MV切入CACC车队后,为保证行车舒适性,车队跟车时距由1.2 s调整为1.6 s,因此车辆的速度波动均有一定程度减小. 相应地,由图4(b)看出,相较于MPC策略,RC-DCS控制下的加速度曲线更加平稳,说明该策略可有效降低因MV介入导致的车队加速度波动,显著提升CACC车队的驾乘舒适性.
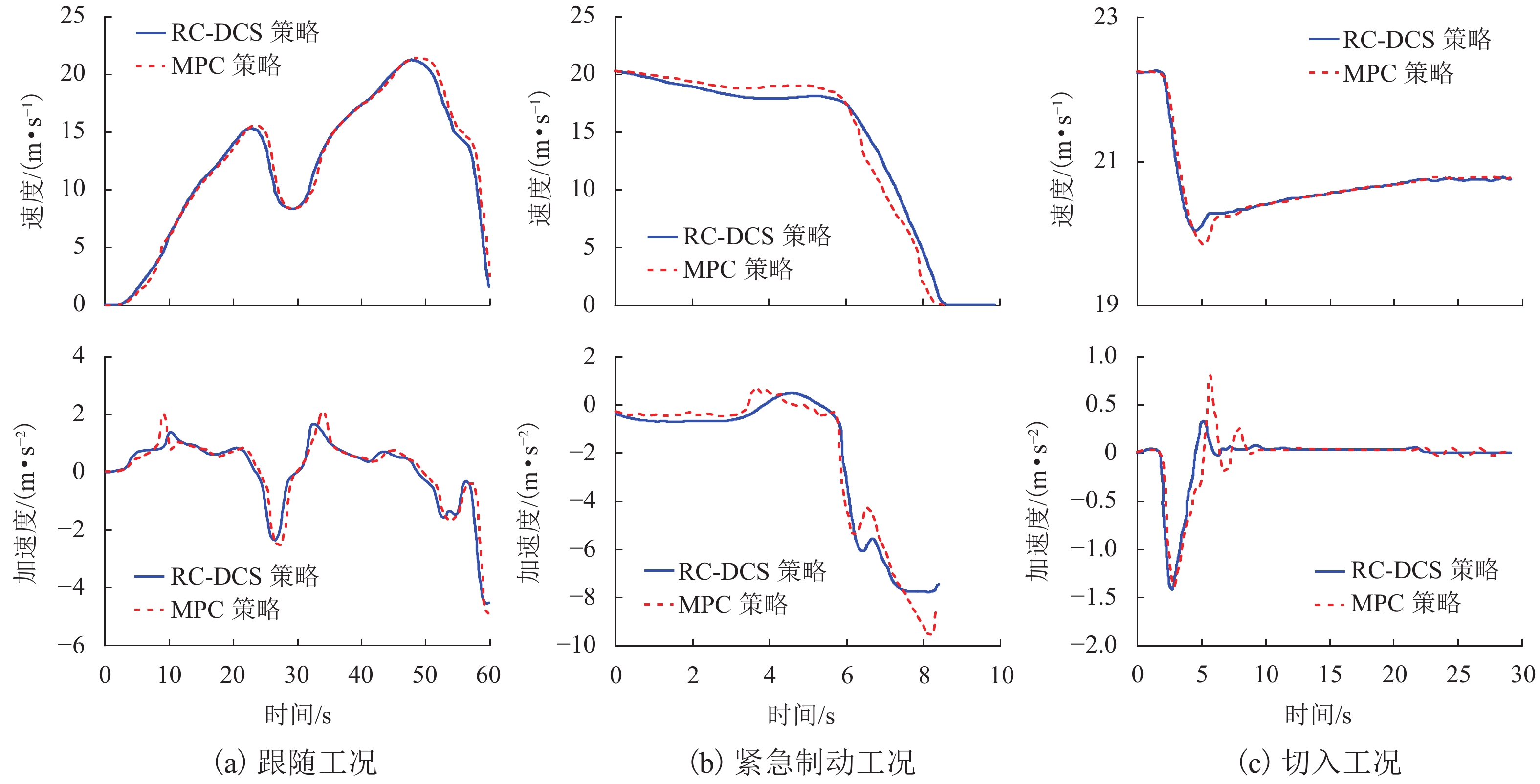
为验证下层控制策略在单车跟车稳定性、驾乘舒适性的效率,选取跟随、紧急制动、MV由旁车道切入本车道3个典型工况,结果如图5所示.
 图 5 典型工况下单车试验结果对比Figure 5. Result comparison of single vehicle experiments under typical working conditions
图 5 典型工况下单车试验结果对比Figure 5. Result comparison of single vehicle experiments under typical working conditions由图5(a)可知:在跟随工况下,相较于MPC策略,RC-DCS响应更及时,曲线振幅有一定程度减小,标准差降低9.6%,偏度降低26.5%. 可见,RC-DCS可有效改善加速度突变,提高跟随过程中乘车舒适性.
由图5(b)可知:在制动工况下,相较于MPC策略,RC-DCS过滤掉加速度的较小波动,标准差降低10.4%. 说明RC-DCS在制动过程中的表现更加平稳.
由图5(c)可知:在切入工况下,相较于MPC策略,RC-DCS对速度变化响应更加及时,加速时调整时间点更早,调整时长约减少2 s. RC-DCS最大加速度0.34 m/s2,MPC策略最大加速度0.82 m/s2,其加速度标准差降低2.9%. 说明RC-DCS具有更好的安全性、舒适性.
3. 结 论
本文以CACC车辆在混行环境下的驾乘舒适性优化为目的,构建适用于CACC系统的双层控制策略. 主要工作有:
1) 设计采用两状态空间的上层控制策略,定义代价函数从宏观优化车队的整体稳定性和舒适性;设计采用油门和制动踏板切换逻辑控制器的下层控制策略,从微观优化单车的加速度输出稳定性.
2) 结合仿真试验对提出的RC-DCS进行验证,结果表明所提策略可有效改善CACC车队跟车间距波动及加速度波动,且在跟车、紧急制动和切入3种典型工况下对加速度控制效果明显优于MPC,有效提升驾乘舒适性能.
综上,RC-DCS可满足仿真场景下驾乘舒适性要求,但受试验条件所限,尚未验证在实车平台的运行效果,后续计划将在实车上进一步开展调试、验证工作,以期提高本策略的实用性.
致谢:扬州市宝应县重点研发计划(BY201908).
-
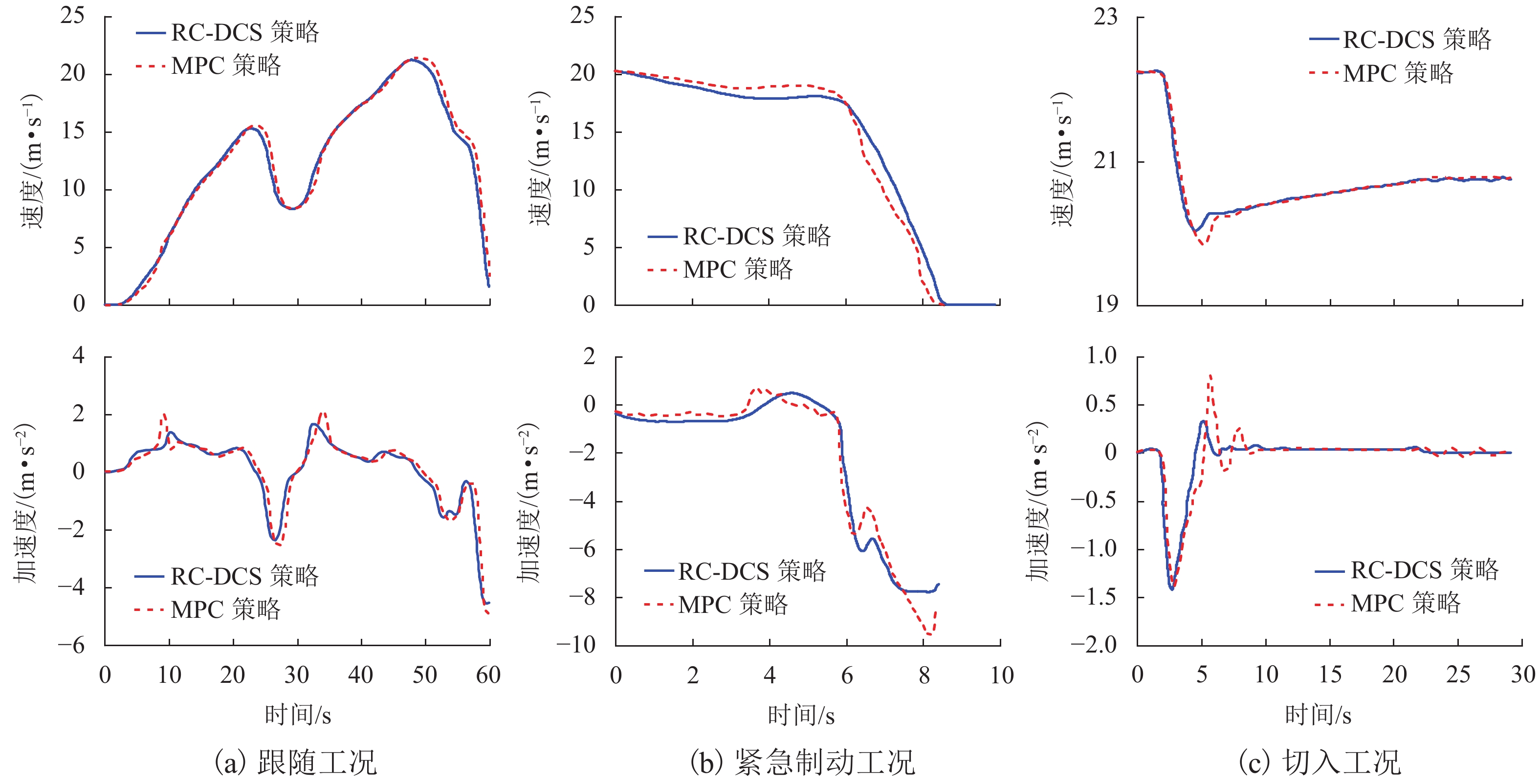
图 5 典型工况下单车试验结果对比
Figure 5. Result comparison of single vehicle experiments under typical working conditions
表 1 控制规则表
Table 1. Control rules
ev ea NB NS ZO PS PB NB NB NB NS NS ZO NS NB NS NS ZO PS ZO NS NS ZO PS PS PS NS ZO PS PS PB PB ZO PS PS PB PB  下载: 导出CSV
下载: 导出CSV
表 2 切换控制策略
Table 2. Switching control strategies
当前
状态输出方案 减速区域
(ev < −0.1)保持区域
(−0.1 ≤ ev ≤ 0.1)加速区域
(ev > 0.1)TA TC TC TC BA BC BC BC NA BC NO TC
下载: 导出CSV
-
[1] BANSAL P, KOCKELMAN K M. Forecasting Americans’ long-term adoption of connected and autonomous vehicle technologies[J]. Transportation Research Part A:Policy and Practice, 2017, 95: 49-63. doi: 10.1016/j.tra.2016.10.013 [2] KILINC A S, BAYBURA T. Determination of minimum horizontal curve radius used in the design of transportation structures, depending on the limit value of comfort criterion lateral jerk[R]. Rome: University of Saskatchewan, 2012. [3] FORSTBERG J. Ride comfort and motion sickness in tilting trains: Human responses to motion environments in train and simulator experiments[D]. Stockholm: Royal Institute of Technology, 2000. [4] POWELL J P, PALACÍN R. Passenger stability within moving railway vehicles:limits on maximum longitudinal acceleration[J]. Urban Rail Transit, 2015, 1(2): 95-103. doi: 10.1007/s40864-015-0012-y [5] GOLDING J F, MUELLER A G, GRESTY M A. A motion sickness maximum around the 0.2 Hz frequency range of horizontal translational oscillation[J]. Aviation,Space,and Environmental Medicine, 2001, 72(3): 188-192. [6] DONOHEW B E, GRIFFIN M J. Motion sickness:effect of the frequency of lateral oscillation[J]. Aviation,Space,and Environmental Medicine, 2004, 75(8): 649-656. [7] CHEUNG B, NAKASHIMA A. A review on the effects of frequency of oscillation on motion sickness[R]. Toronto: Defence Research and Development Toronto, 2006. [8] ELBANHAWI M, SIMIC M, JAZAR R. In the passenger seat:investigating ride comfort measures in autonomous cars[J]. IEEE Intelligent Transportation Systems Magazine, 2015, 7(3): 4-17. doi: 10.1109/MITS.2015.2405571 [9] MILAKIS D, VAN AREM B, WEE B V. Policy and society related implications of automated driving:a review of literature and directions for future research[J]. Journal of Intelligent Transportation Systems, 2017, 21(4): 324-348. doi: 10.1080/15472450.2017.1291351 [10] YANG C Y D, OZBAY K, BAN X. Developments in connected and automated vehicles[J]. Journal of Intelligent Transportation Systems, 2017, 21(1/2/3/4/5/6): 251-254. [11] HOOGENDOORN R G, VAN ARERM B, HOOGENDOOM S. Automated driving,traffic flow efficiency,and human factors:literature review[J]. Transportation Research Record, 2014, 2422(1): 113-120. doi: 10.3141/2422-13 [12] TALEBPOUR A, MAHMASSANI H S. Influence of connected and autonomous vehicles on traffic flow stability and throughput[J]. Transportation Research Part C:Emerging Technologies, 2016, 71: 143-163. doi: 10.1016/j.trc.2016.07.007 [13] SHLADOVER S E. Connected and automated vehicle systems:introduction and overview[J]. Journal of Intelligent Transportation Systems, 2018, 22(3): 190-200. doi: 10.1080/15472450.2017.1336053 [14] JIA D Y, NGODUY D. Enhanced cooperative car-following traffic model with the combination of V2V and V2I communication[J]. Transportation Research Part B:Methodological, 2016, 90: 172-191. doi: 10.1016/j.trb.2016.03.008 [15] SUN J, ZHENG Z D, SUN J. Stability analysis methods and their applicability to car-following models in conventional and connected environments[J]. Transportation Research Part B:Methodological, 2018, 109: 212-237. doi: 10.1016/j.trb.2018.01.013 [16] ZHOU Y, WANG M, AHN S. Distributed model predictive control approach for cooperative car-following with guaranteed local and string stability[J]. Transportation Research Part B:Methodological, 2019, 128: 69-86. doi: 10.1016/j.trb.2019.07.001 [17] MA Y L, LI Z X, MALEKIAN R, et al. Hierarchical fuzzy logic-based variable structure control for vehicles platooning[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(4): 1329-1340. doi: 10.1109/TITS.2018.2846198 [18] 王平,高天赐,汪鑫,等. 基于拟合平纵断面的铁路特大桥梁线路平顺性评估[J]. 西南交通大学学报,2020,55(2): 231-237, 272. doi: 10.1007/s12239-018-0034-zWANG Ping, GAO Tianci, WANG Xin, et al. Smoothness estimation of super-large bridges in railway line based on fitting railway plane and profile[J]. Journal of Southwest Jiaotong University, 2020, 55(2): 231-237, 272. doi: 10.1007/s12239-018-0034-z [19] SONG X L, WANG K, HE D F. Switching multi-objective receding horizon control for CACC of mixed vehicle strings[J]. IEEE Access, 2020, 8: 79684-79694. doi: 10.1109/ACCESS.2020.2990426 [20] ZHU M, CHEN H Y, XIONG G M. A model predictive speed tracking control approach for autonomous ground vehicles[J]. Mechanical Systems and Signal Processing, 2017, 87: 138-152. doi: 10.1016/j.ymssp.2016.03.003 [21] ZHOU Y J, ZHU H B, GUO M M, et al. Impact of CACC vehicles’ cooperative driving strategy on mixed four-lane highway traffic flow[J]. Physica A:Statistical Mechanics and Its Applications, 2020, 540: 122721.1-122721.13. doi: 10.1016/j.physa.2019.122721 [22] HE Y L, ZHOU Q, MAKRIDIS M, et al. Multiobjective co-optimization of cooperative adaptive cruise control and energy management strategy for PHEVs[J]. IEEE Transactions on Transportation Electrification, 2020, 6(1): 346-355. doi: 10.1109/TTE.2020.2974588 [23] NIE L Z, GUAN J Y, LU C H, et al. Longitudinal speed control of autonomous vehicle based on a self-adaptive PID of radial basis function neural network[J]. IET Intelligent Transport Systems, 2018, 12(6): 485-494. doi: 10.1049/iet-its.2016.0293 期刊类型引用(4)
1. 何山,袭悦,黄锦洲,陈子韬,黄培辉. CACC车辆在信号灯路口通行的控制算法研究. 汽车工程学报. 2024(06): 981-992 .  百度学术
百度学术2. 孟奕名,曲大义,杨子奕,陈意成,邵德栋. 网联混合车流跟驰特性及稳态响应策略. 青岛理工大学学报. 2023(03): 104-112 . 百度学术3. 段春艳,陈志高,蒋仁言. 混行交叉口下智能车辆驾驶轨迹控制方法. 计算机仿真. 2023(10): 136-140 . 百度学术4. 徐哲,刘豪,党威,胡趁义,龙永文. 汽车制动舒适性控制研究综述. 科学技术与工程. 2022(17): 6790-6801 . 百度学术其他类型引用(7)
-

 下载:
下载:
 下载:
下载:
 百度学术
百度学术
 点击查看大图
点击查看大图
计量
- 文章访问数: 533
- HTML全文浏览量: 374
- PDF下载量: 21
- 被引次数: 11