- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database


| Citation: | HU Mingzhu, ZHANG Weiwei, ZHANG Jian, ZHANG Haizhu. Metamodel-Driven Flexible Job Shop Embodied Agent and Its Scheduling System Construction[J]. Journal of Southwest Jiaotong University. doi: 10.3969/j.issn.0258-2724.20240562

|
Flexible job shop scheduling optimization is an important research topic in digital manufacturing science, especially the random occurrence of abnormal disturbances such as machine failures and order changes, which disrupt the original production plan, causing problems such as unreasonable resource allocation, delayed order delivery, and increased production costs. In recent years, distributed multi-agent scheduling methods have been considered to be one of the most effective ways to improve the response speed of manufacturing system disturbances and reduce the negative impact of uncertain disturbances in the production process. In the context of job shop scheduling, designing an embodied scheduling agent that integrates the dynamic behavior of physical entities enables real-time environmental perception and autonomous decision-making based on behavioral feedback during disturbances. This ensures the efficient operation of the production system.
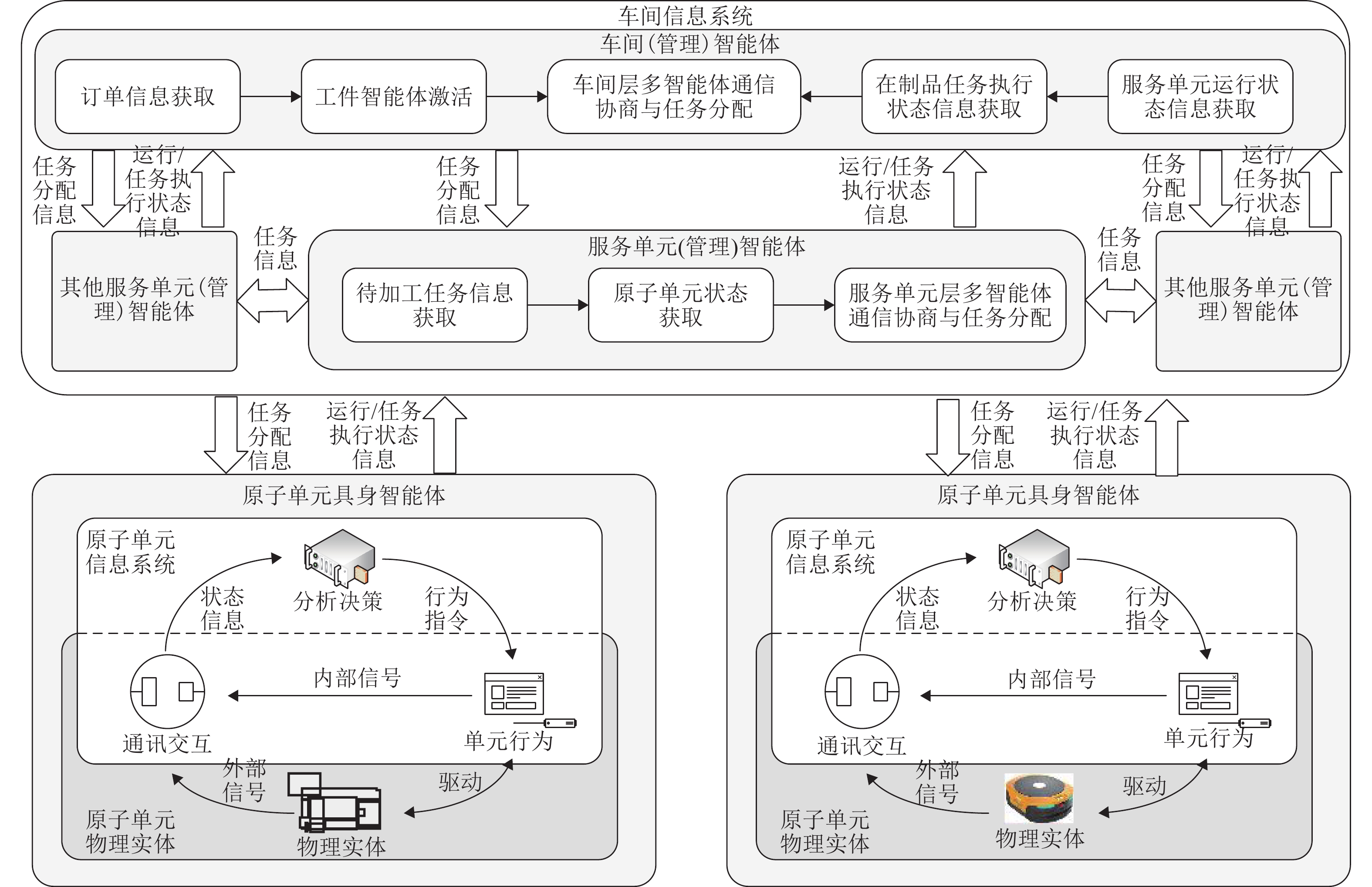
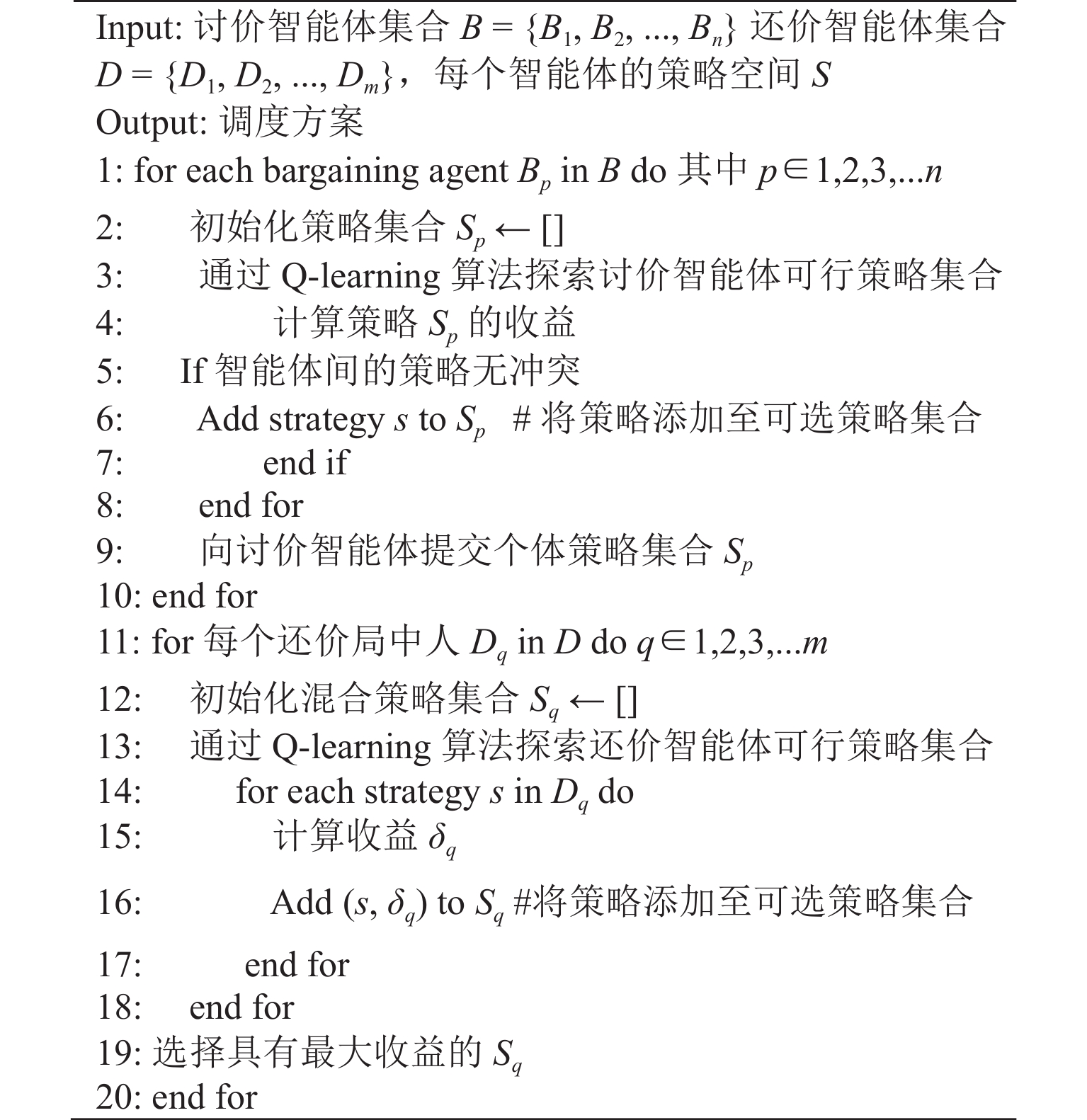
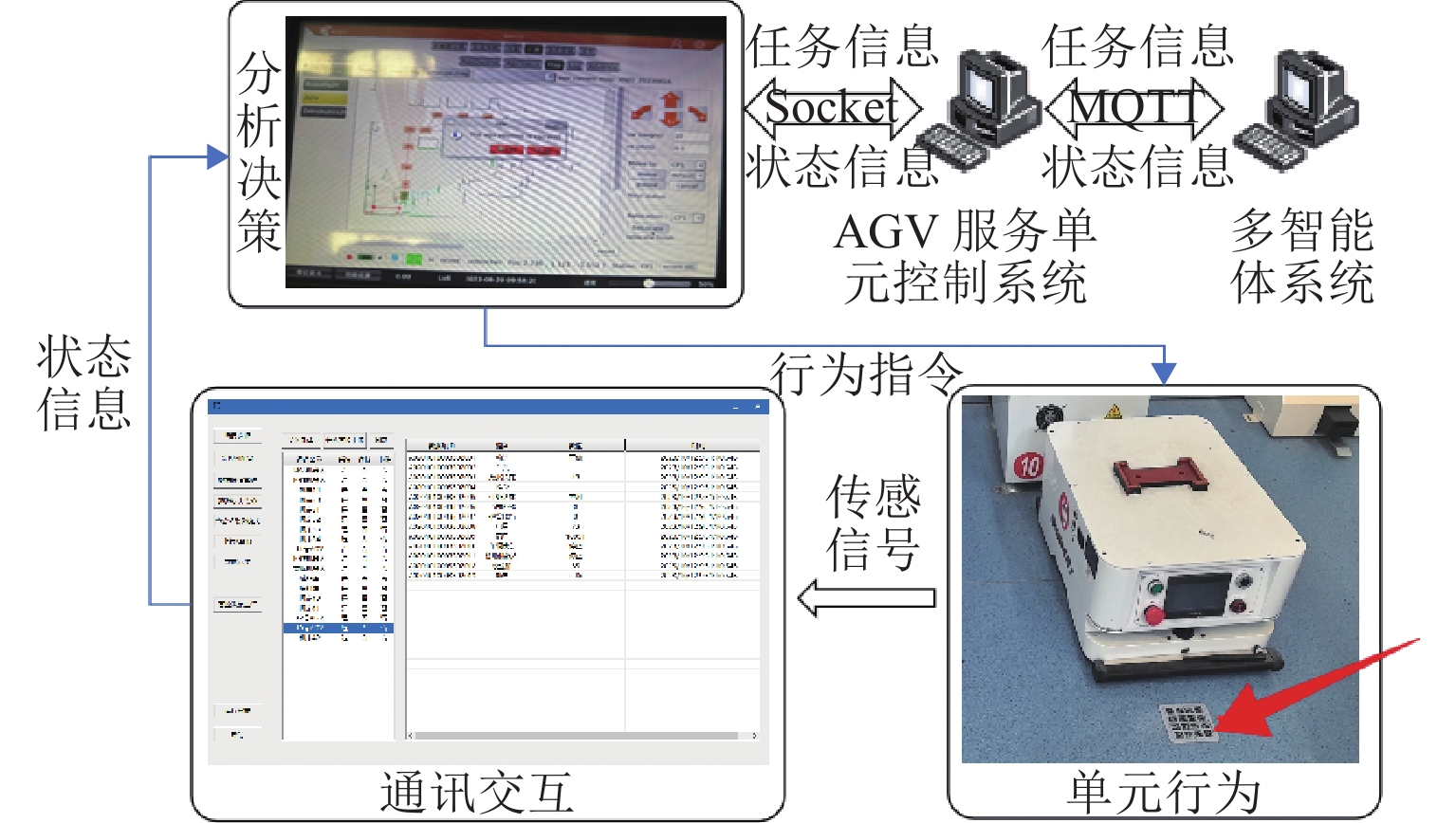
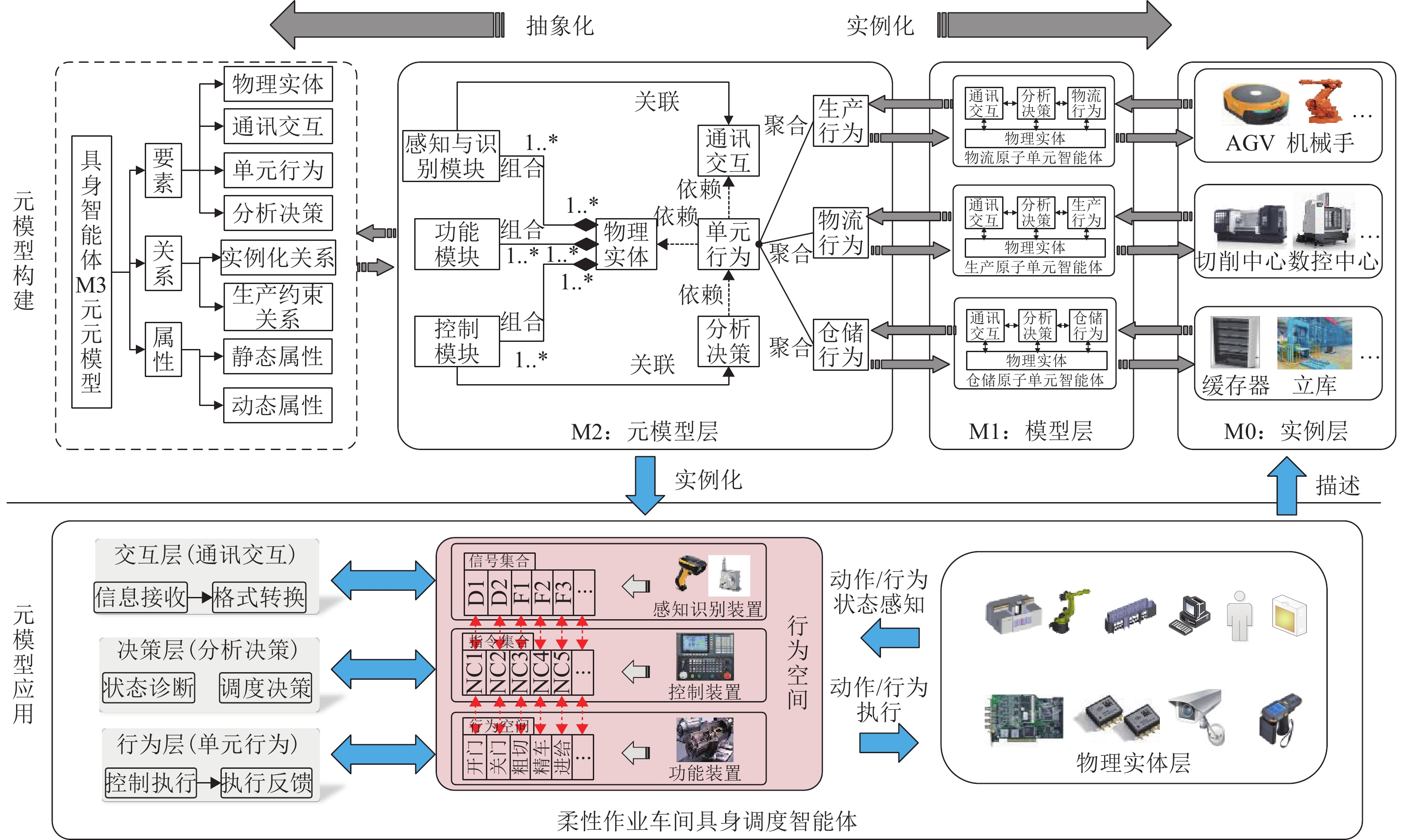
To develop a multi-agent scheduling method for flexible job shops based on embodied agents and to enhance the stability and responsiveness of the system during disruptive events, a metamodel-driven approach for constructing embodied agents in flexible job shops was proposed. By instantiating this model, a scheduling system with a unified structure of embodied agents was achieved. First, to enable agents to perform autonomous decision-making and real-time dynamic adjustments, the concept of embodied intelligence was applied. Based on the existing interaction layer, decision layer, and adaptation layer of job shop scheduling agents, their instruction sets, behavior spaces, and sensory signal sets were associated and encapsulated to form embodied agents with physical bodies and behavioral spaces. Based on the resource composition characteristics of flexible job shops, the elements, relationships, and attributes of embodied agents were analyzed and abstracted. A metamodel for embodied agents in flexible job shops was proposed, enabling the unified modeling of embodied scheduling agents and providing a foundational model for their collaborative scheduling. Second, through instantiation operations such as inheritance, composition, aggregation, dependency, and association applied to the metamodel, a distributed multi-agent scheduling system with a unified structure and self-organizing collaborative operation capability was developed. Finally, a set of distributed multi-agent scheduling strategies was designed based on the different functions of different agents and the different information they can obtain. By integrating these strategies with a Q-game negotiation mechanism, collaborative scheduling among multiple agents was realized, thereby improving the stability of the scheduling method and enhancing its responsiveness to disruptions. This scheduling system, based on embodied agents, enabled the adjustment of scheduling strategies at the individual level when disruptive events occur. This approach effectively reduced the number of information exchanges during the scheduling process, improving the stability of the multi-agent system and enhancing its scheduling optimization capabilities in the face of disruptions.
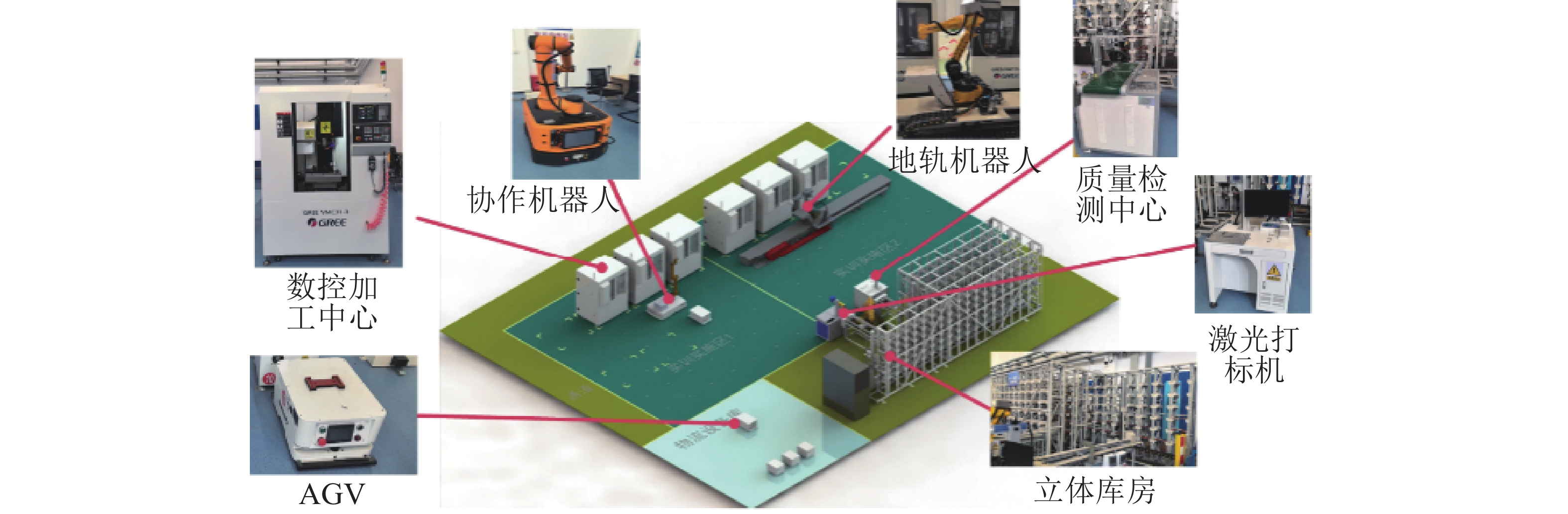
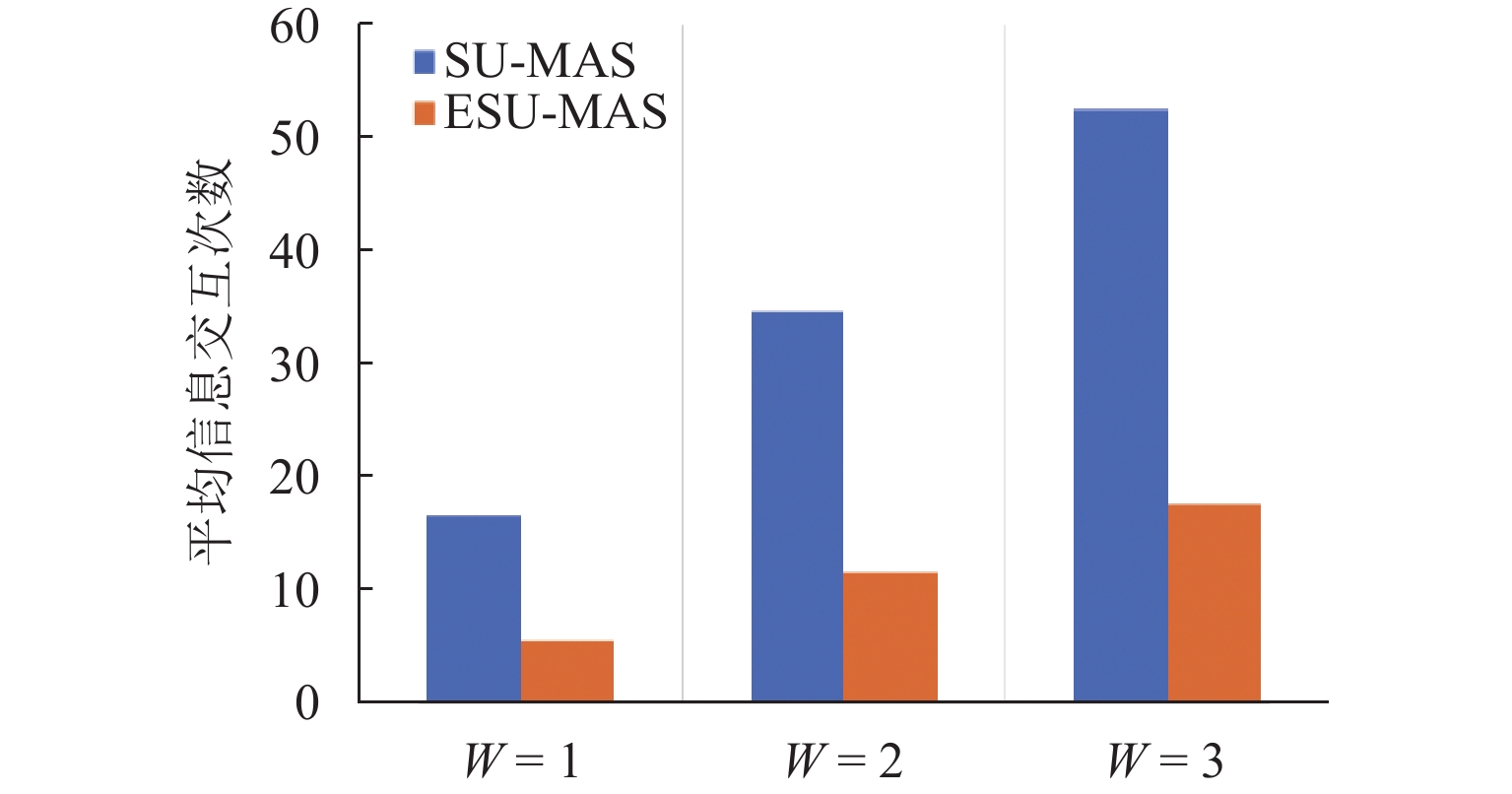
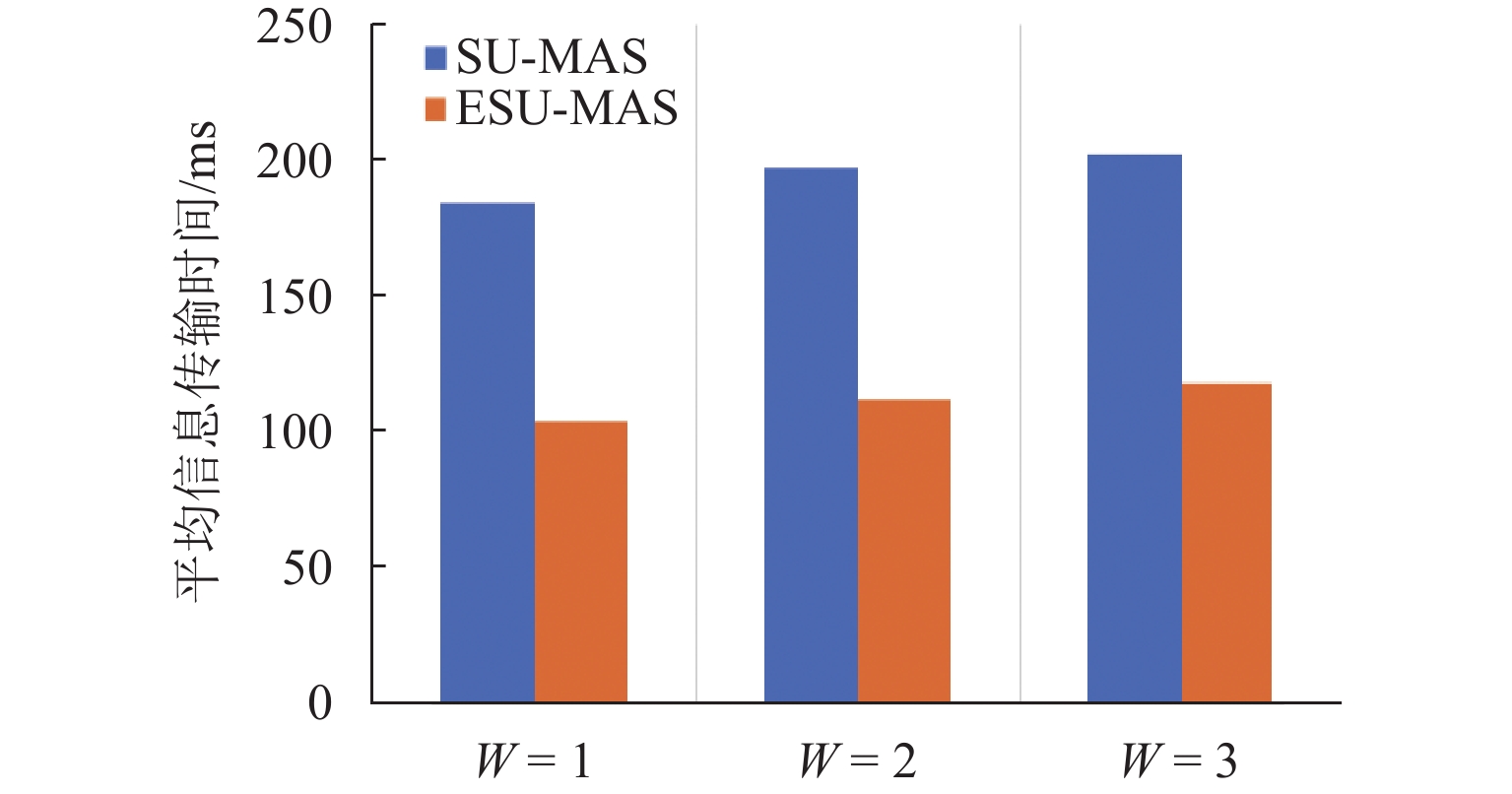
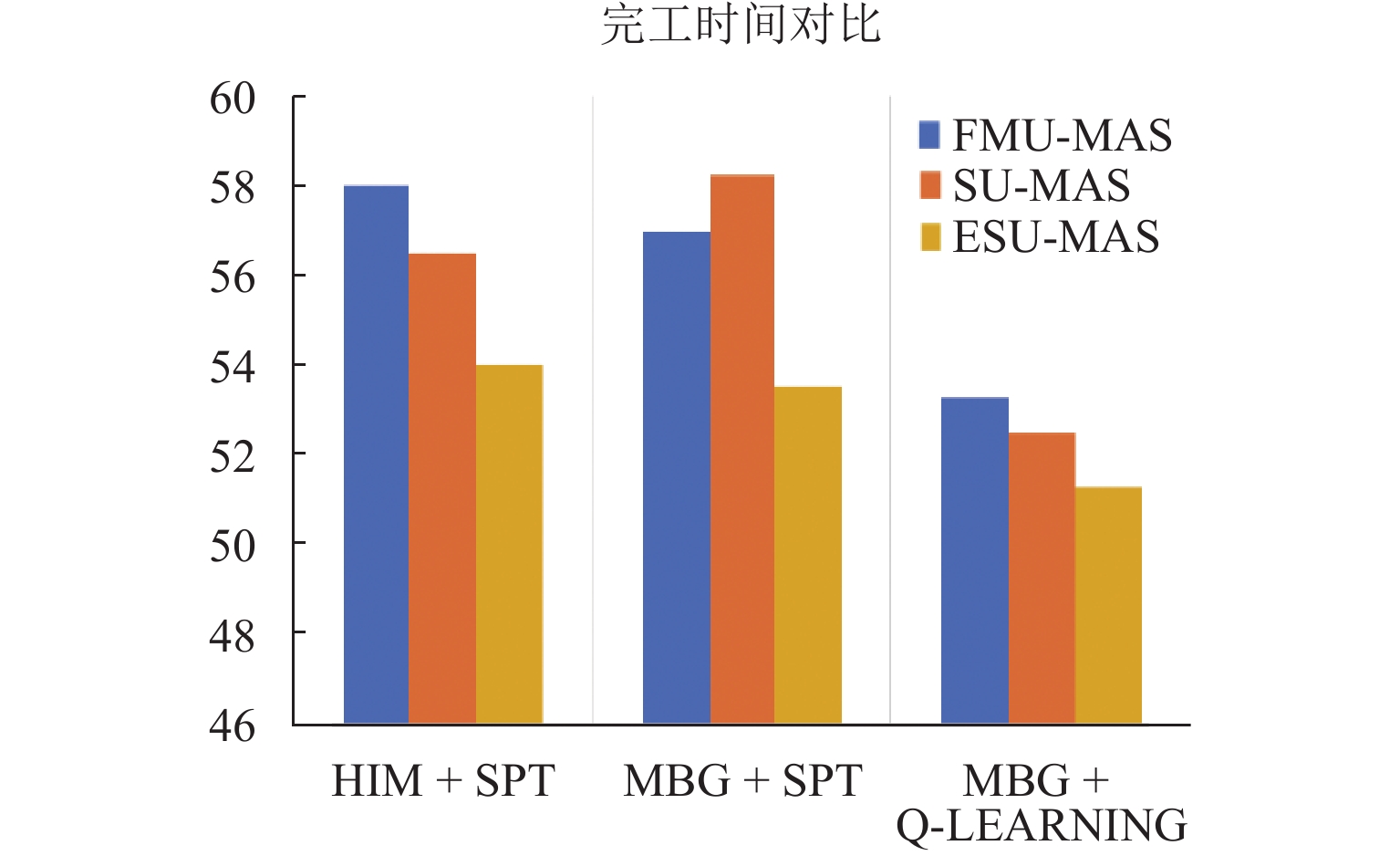
To validate the advantages of the proposed embodied scheduling agent modeling method and the multi-agent scheduling system, two small-scale manufacturing workshops producing structural components were used as case studies. The proposed method was compared with existing approaches in three aspects: embodied agent modeling, collaborative operation, and scheduling optimization. Experimental results demonstrate that the embodied agent modeling method proposed in this paper ensures model structure consistency, guaranteeing that the model adheres to predefined specifications and rules, thereby providing a unified modeling foundation for the collaborative scheduling of multi-agents. In the embodied multi-agent scheduling system, each agent generates a complete set of feasible individual strategies after evaluating all possible actions. Negotiation and interaction among agents are conducted based on these strategy sets. The number of interactions remains independent of the number of actions selected by the agents, resulting in an average reduction of 60.4% in communication volume and a 32.78% average decrease in computational response time. In terms of scheduling optimization performance, agents enhance the diversity of scheduling strategies during the negotiation process by adjusting their individual scheduling strategies, thereby improving the system’s global optimization capability. Compared to existing methods, the proposed approach achieves an improvement of more than 22.6%.
In summary, the proposed multi-agent scheduling method based on embodied agents not only improves system responsiveness and stability in handling disruptive events but also significantly enhances global optimization performance. This provides an efficient and robust solution for scheduling optimization in flexible job shops and offers new research directions and technical support for intelligent scheduling and collaboration in future manufacturing systems. In the future, further research could focus on applying the proposed method to larger and more complex manufacturing scenarios, integrating real-time sensing technologies and advanced machine learning algorithms to further enhance the adaptability and intelligence of the scheduling system.

| [1] |
庄存波, 刘检华, 熊辉. 分布式自主协同制造: 一种智能车间运行新模式[J]. 计算机集成制造系统, 2019, 25(8): 1865-1874.
ZHUANG Cunbo, LIU Jianhua, XIONG Hui. Distributed initiative and collaborative manufacturing: new paradigm for intelligent shop-floor[J]. Computer Integrated Manufacturing Systems, 2019, 25(8): 1865-1874.
|
| [2] |
ZHANG J, DING G F, ZOU Y S, et al. Review of job shop scheduling research and its new perspectives under Industry 4.0[J]. Journal of Intelligent Manufacturing, 2019, 30(4): 1809-1830. doi: 10.1007/s10845-017-1350-2
|
| [3] |
PAL M, MITTAL M L, SONI G, et al. A multi-agent system for FJSP with setup and transportation times[J]. Expert Systems with Applications, 2023, 216: 119474. doi: 10.1016/j.eswa.2022.119474
|
| [4] |
ZHANG J, DENG T M, JIANG H F, et al. Bi-level dynamic scheduling architecture based on service unit digital twin agents[J]. Journal of Manufacturing Systems, 2021, 60: 59-79. doi: 10.1016/j.jmsy.2021.05.007
|
| [5] |
WANG J, LIU Y, REN S, et al. Evolutionary game based real-time scheduling for energy-efficient distributed and flexible job shop[J]. Journal of Cleaner Production, 2021, 293: 126093. doi: 10.1016/j.jclepro.2021.126093
|
| [6] |
杨博见, 杜丽, 郭景仁. 基于多Agent的柔性作业车间动态调度方法研究[J]. 航空制造技术, 2023, 66(6): 99-107.
YANG Bojian, DU Li, GUO Jingren. Research on dynamic scheduling of flexible job-shop based on multi-agent[J]. Aeronautical Manufacturing Technology, 2023, 66(6): 99-107.
|
| [7] |
周毅君. 基于多智体的多资源约束车间调度技术与系统研究[D]. 武汉: 华中科技大学, 2021.
|
| [8] |
GU W B, LIU S Q, ZHANG Z Q, et al. A distributed physical architecture and data-based scheduling method for smart factory based on intelligent agents[J]. Journal of Manufacturing Systems, 2022, 65: 785-801. doi: 10.1016/j.jmsy.2022.11.006
|
| [9] |
李浩, 邢志远, 李琳利, 等. 基于多智能体的工业数字孪生系统云边端架构与关键技术[J]. 计算机集成制造系统, 2024, 30(11): 3755-3770.
LI Hao, XING Zhiyuan, LI Linli, et al. Cloud-edge-device system architecture and key technologies of industrial digital twin system based on multi-agent[J]. Computer Integrated Manufacturing Systems, 2024, 30(11): 3755-3770.
|
| [10] |
江海凡, 丁国富, 肖通, 等. 数字孪生演进模型及其在智能制造中的应用[J]. 西南交通大学学报, 2022, 57(6): 1386-1394.
JIANG Haifan, DING Guofu, XIAO Tong, et al. Digital twin evolution model and its applications in intelligent manufacturing[J]. Journal of Southwest Jiaotong University, 2022, 57(6): 1386-1394.
|
| [11] |
ZHAO Z K, WU Q X, WANG J, et al. Exploring embodied intelligence in soft robotics: a review[J]. Biomimetics, 2024, 9(4): 248. doi: 10.3390/biomimetics9040248
|
| [12] |
丁国富, 刘名远, 谢家翔, 等. 数字孪生制造装备高可用运行协同的计算方法[J]. 西南交通大学学报, 2025, 60(1): 194-204.
DING Guofu, LIU Mingyuan, XIE Jiaxiang, et al. Collaborative computing method for highly available operation of digital twin manufacturing equipment[J]. Journal of Southwest Jiaotong University, 2025, 60(1): 194-204.
|
| [13] |
邓三鹏, 张香玲, 王凯, 等. 具身智能机器人关键技术及发展趋势研究[J]. 装备制造技术, 2024(6): 2-10.
DENG Sanpeng, ZHANG Xiangling, WANG Kai, et al. Research on key technologies and development trend of intelligent robot with body[J]. Equipment Manufacturing Technology, 2024(6): 2-10.
|
| [14] |
YANG X L, LIU X M, ZHANG H, et al. Meta-model-based shop-floor digital twin architecture, modeling and application[J]. Robotics and Computer-Integrated Manufacturing, 2023, 84: 102595. doi: 10.1016/j.rcim.2023.102595
|
| [15] |
白辰甲, 许华哲, 李学龙. 大模型驱动的具身智能: 发展与挑战[J]. 中国科学: 信息科学, 2024, 54(9): 2035-2082. doi: 10.1360/SSI-2024-0076
BAI Chenjia, XU Huazhe, LI Xuelong. Embodied-AI with large models: research and challenges[J]. Scientia Sinica (Informationis), 2024, 54(9): 2035-2082. doi: 10.1360/SSI-2024-0076
|
| [16] |
ZHANG Y, ZHU H H, TANG D B, et al. Dynamic job shop scheduling based on deep reinforcement learning for multi-agent manufacturing systems[J]. Robotics and Computer-Integrated Manufacturing, 2022, 78: 102412. doi: 10.1016/j.rcim.2022.102412
|
| [17] |
ZHAO F Q, DI S L, WANG L. A hyperheuristic with Q-learning for the multiobjective energy-efficient distributed blocking flow shop scheduling problem[J]. IEEE Transactions on Cybernetics, 2023, 53(5): 3337-3350. doi: 10.1109/TCYB.2022.3192112
|
| [18] |
WEI L X, HE J X, GUO Z Y, et al. A multi-objective migrating birds optimization algorithm based on game theory for dynamic flexible job shop scheduling problem[J]. Expert Systems with Applications, 2023, 227: 120268. doi: 10.1016/j.eswa.2023.120268
|
| [19] |
李奇, 艾钰璇, 孙彩, 等. 非合作博弈背景下基于BSA的配电网优化重构[J]. 西南交通大学学报, 2024, 59(2): 438-446.
LI Qi, AI Yuxuan, SUN Cai, et al. Optimal reconfiguration of distribution network based on backtracking search algorithm under the background of non-cooperative game theory[J]. Journal of Southwest Jiaotong University, 2024, 59(2): 438-446.
|
| [20] |
陈鸣, 朱海华, 张泽群, 等. 基于信息素的多Agent车间调度策略[J]. 中国机械工程, 2018, 29(22): 2659-2665.
CHEN Ming, ZHU Haihua, ZHANG Zequn, et al. Multi-agent job shop scheduling strategy based on pheromone[J]. China Mechanical Engineering, 2018, 29(22): 2659-2665.
|
| [21] |
BRANDIMARTE P. Routing and scheduling in a flexible job shop by tabu search[J]. Annals of Operations Research, 1993, 41(3): 157-183. doi: 10.1007/BF02023073
|
| [22] |
KACEM I, HAMMADI S, BORNE P. Pareto-optimality approach for flexible job-shop scheduling problems: hybridization of evolutionary algorithms and fuzzy logic[J]. Mathematics and Computers in Simulation, 2002, 60(3/4/5): 245-276.
|
| [23] |
NOURI H E, BELKAHLA DRISS O, GHÉDIRA K. Solving the flexible job shop problem by hybrid metaheuristics-based multiagent model[J]. Journal of Industrial Engineering International, 2018, 14(1): 1-14. doi: 10.1007/s40092-017-0204-z
|
Figures(10) / Tables(9)


 DownLoad:
DownLoad: