- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | ZHAO Jianhui, CHEN Wenfei, YANG Guichun, CHEN Jingyan. Simulation Research on Coupling Relationship Between Energy Distribution and Dynamic Response of High-Speed Solenoid Valves[J]. Journal of Southwest Jiaotong University, 2024, 59(6): 1398-1405. doi: 10.3969/j.issn.0258-2724.20220452

|
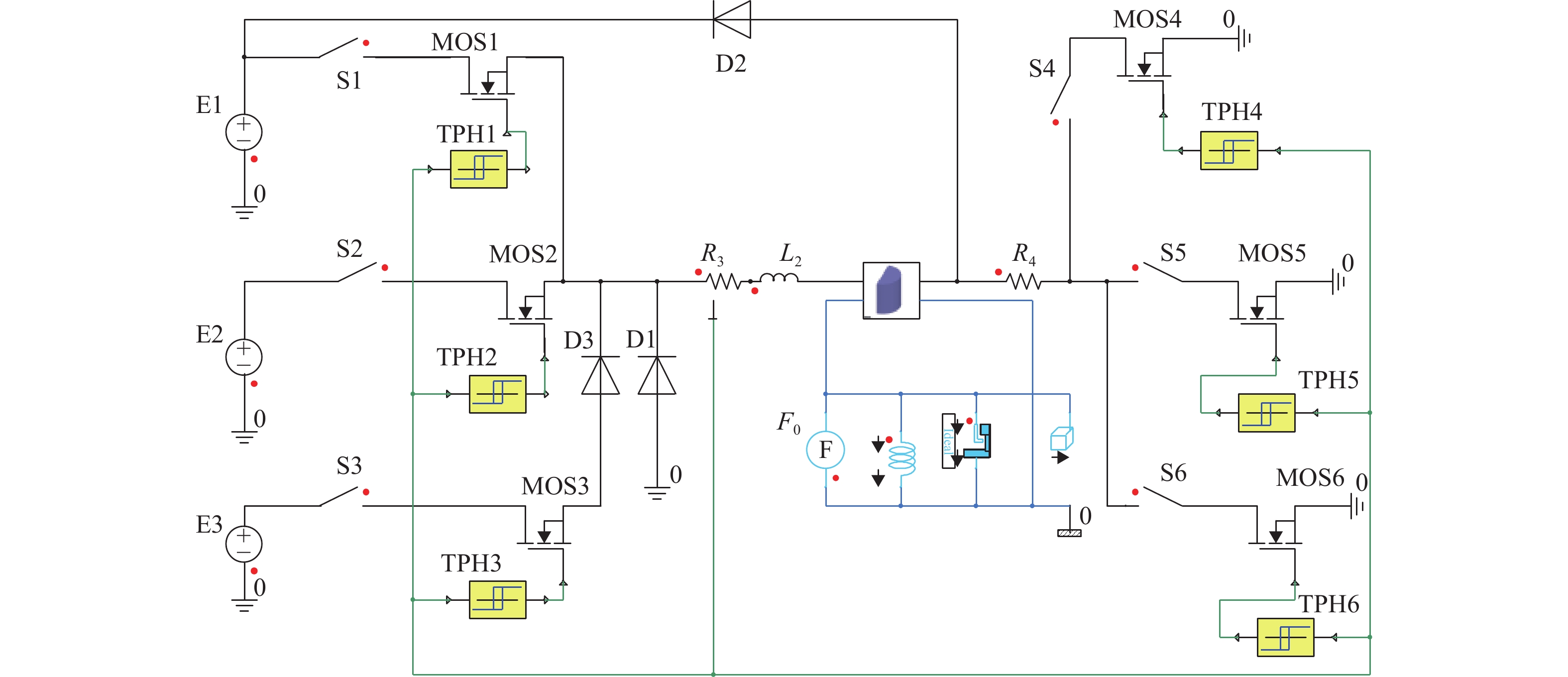
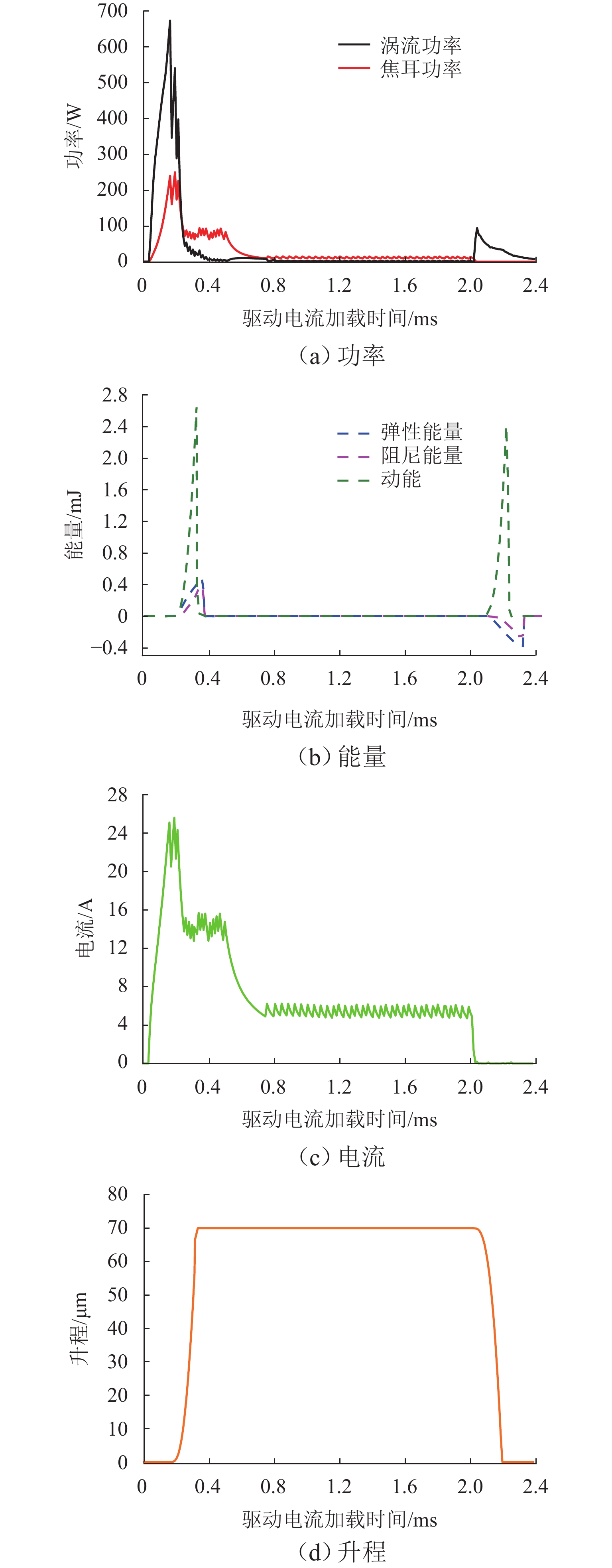
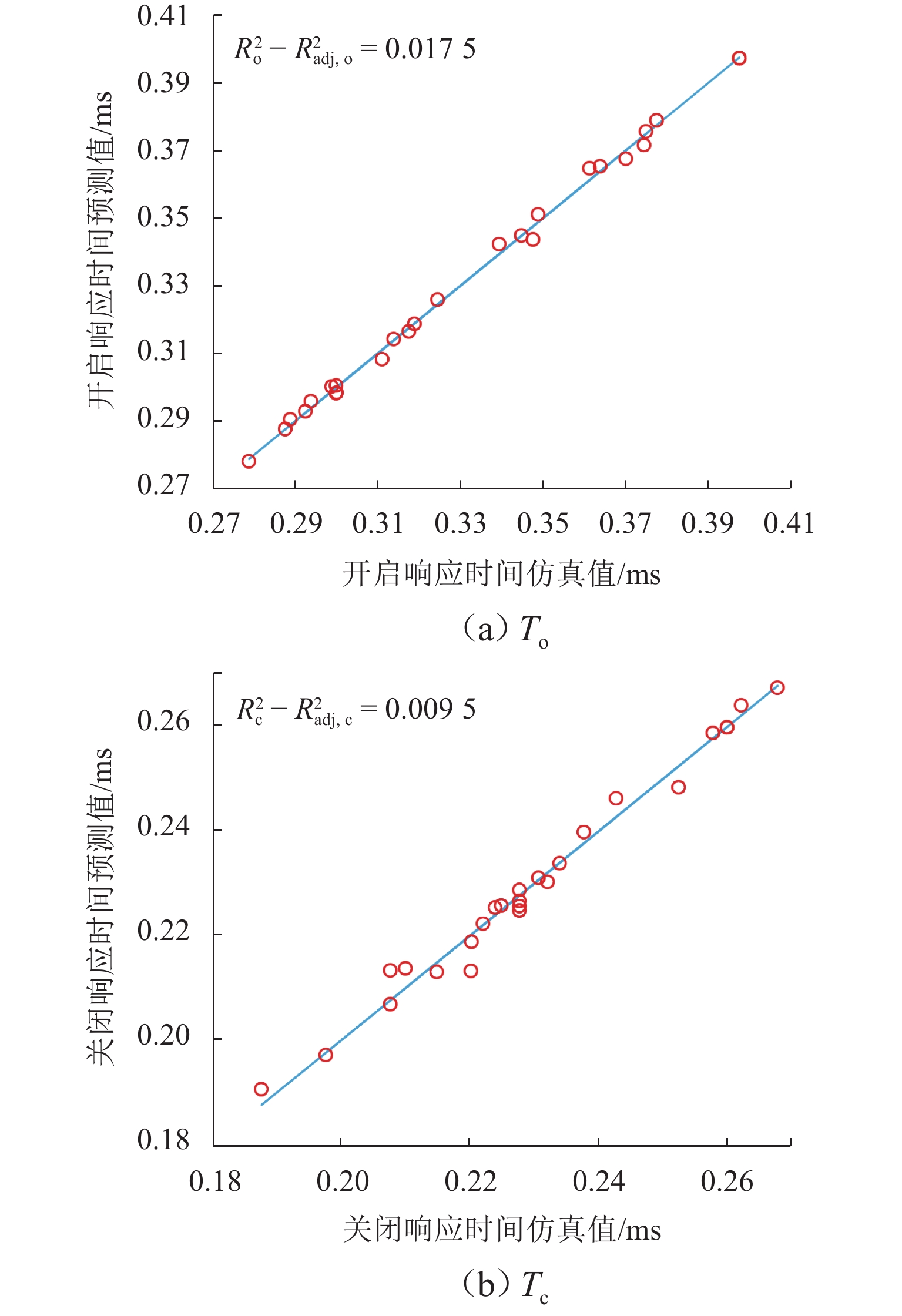
In order to study the energy distribution inside the high-speed solenoid valve and the coupling relationship between the energy parameters and the dynamic response, the performance of the high-speed solenoid valve was optimized. Firstly, the dynamic model of the high-speed solenoid valve was established based on the finite element method, and the accuracy of the model was validated through the experimental data. Secondly, based on the D-optimal design of experiments and the method of least squares, the response surface prediction model of the solenoid valve’s dynamic response characteristics was constructed, with the energy parameters as the factors. Finally, based on the meta-analysis method, the simulation analysis of the dynamic response of the high-speed solenoid valve with significant energy parameters and parameter interactions was carried out. The results show that the eddy energy

| [1] |
GU Y Q, FAN L Y, ZHANG J Y, et al. Multi-objective optimization of high-speed solenoid valve for biodiesel electronic unit pump[J]. Current Chinese Science, 2022, 1(1): 38-47.
|
| [2] |
TAO G, CHEN H Y, J Y Y, et al. Optimal design of the magnetic field of a high-speed response solenoid valve[J]. Journal of Materials Processing Technology, 2002, 129(1/2/3): 555-558.
|
| [3] |
WANG Q L, YANG F Y, YANG Q, et al. Experimental analysis of new high-speed powerful digital solenoid valves[J]. Energy Conversion and Management, 2011, 52(5): 2309-2313. doi: 10.1016/j.enconman.2010.12.032
|
| [4] |
SUN Z Y, LI G X, WANG L, et al. Effects of structure parameters on the static electromagnetic characteristics of solenoid valve for an electronic unit pump[J]. Energy Conversion and Management, 2016, 113: 119-130. doi: 10.1016/j.enconman.2016.01.031
|
| [5] |
ZHAO J H, WANG M L, WANG Z J, et al. Different boost voltage effects on the dynamic response and energy losses of high-speed solenoid valves[J]. Applied Thermal Engineering, 2017, 123: 1494-1503. doi: 10.1016/j.applthermaleng.2017.05.117
|
| [6] |
BREIDI F, HELMUS T, LUMKES J. The impact of peak-and-hold and reverse current solenoid driving strategies on the dynamic performance of commercial cartridge valves in a digital pump/motor[J]. International Journal of Fluid Power, 2016, 17(1): 37-47. doi: 10.1080/14399776.2015.1120138
|
| [7] |
EBRAHIMI N, SCHIMPF P, JAFARI A. Design optimization of a solenoid-based electromagnetic soft actuator with permanent magnet core[J]. Sensors and Actuators A: Physical, 2018, 284: 276-285. doi: 10.1016/j.sna.2018.10.026
|
| [8] |
ZHAO J H, YUE P F, GREKHOV L, et al. Hold current effects on the power losses of high-speed solenoid valve for common-rail injector[J]. Applied Thermal Engineering, 2018, 128: 1579-1587. doi: 10.1016/j.applthermaleng.2017.09.123
|
| [9] |
LAN Q, BAI Y, FAN L Y, et al. Investigation on fuel injection quantity of low-speed diesel engine fuel system based on response surface prediction model[J]. Energy, 2020, 211: 118946.1-118946.11.
|
| [10] |
MÄKELÄ M. Experimental design and response surface methodology in energy applications: a tutorial review[J]. Energy Conversion and Management, 2017, 151: 630-640. doi: 10.1016/j.enconman.2017.09.021
|
| [11] |
VITALI R. Response surface methods for high-dimensional structural design problems[M]. Florida: University of Florida, 2000: 270-289.
|
| [12] |
GE Q, MENENDEZ M. Extending Morris method for qualitative global sensitivity analysis of models with dependent inputs[J]. Reliability Engineering & System Safety, 2017, 162: 28-39.
|
| [13] |
FENG K X, LU Z Z, XIAO S N. A new global sensitivity measure based on the elementary effects method[J]. Computers & Structures, 2020, 229: 106183.1-106183.12.
|
| [14] |
FENG K X, LU Z Z, YANG C Q. Enhanced Morris method for global sensitivity analysis: good proxy of Sobol’ index[J]. Structural and Multidisciplinary Optimization, 2019, 59(2): 373-387. doi: 10.1007/s00158-018-2071-7
|

Figures(10) / Tables(4)


 DownLoad:
DownLoad: