- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | MA Liang, HU Chenhan, JIN Fucai, DONG Wei. Double-Layer and Multi-objective Constraint Optimization Model for Transportation Scheduling of Molten Iron[J]. Journal of Southwest Jiaotong University, 2023, 58(2): 357-366, 397. doi: 10.3969/j.issn.0258-2724.20220008

|
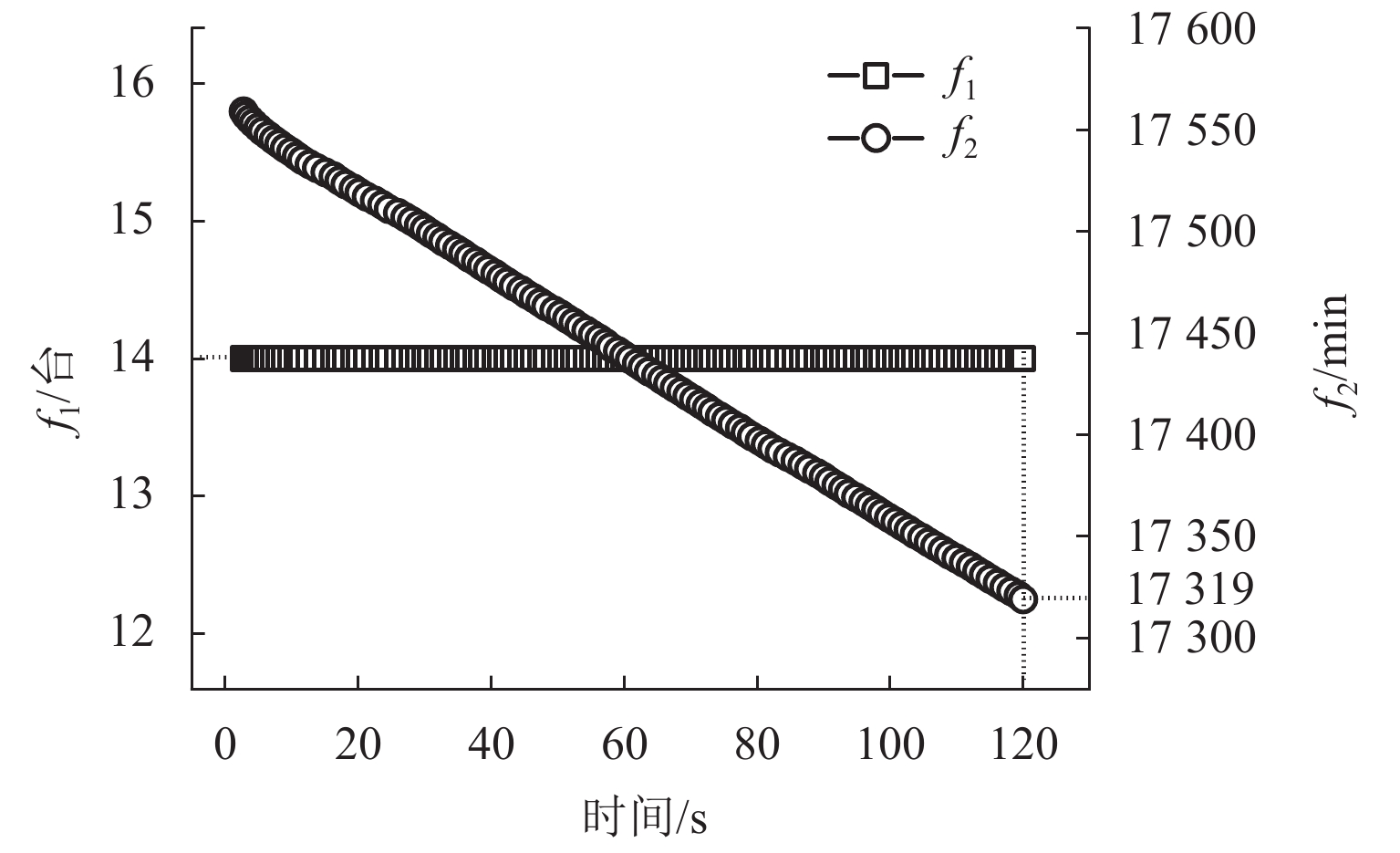
In order to realize the collaborative optimization of operation scheduling and resource allocation in molten iron transportation, based on the theory of the cumulative scheduling with constraint programming and lexicographic multi-objective optimization, a double-layer and multi-objective constraint optimization method is explored for the transportation scheduling of molten iron. Firstly, setting the highest turnover rate of molten iron tanks and the highest operation efficiency as two lexicographic objectives, the upper-level constraint optimization model is built for molten iron transportation operation. In the model, the constraints are involved, such as operation sequence, operation implementation logic, time limit of molten iron cooling, limited operation times of molten iron tank, resource capacity limit, and resource pool of the molten iron tanks. Secondly, with the highest resource utilization balance, the lower-level constrained optimization model is established for resource allocation in molten iron transportation, in which the uniqueness of operation implementation and resource capacity are taken as constraints. Finally, the hybrid algorithm of constraint propagation and multi-point constructive search is developed to solve the whole model iteratively. The case study shows that, the turnover rate target and transportation efficiency target obtained by the hybrid algorithm are 14.29% and 60.53% higher than those obtained by the basic depth first backtracking algorithm respectively. Compared with weighted and single objective models, lexicographical multi-objective model improves the efficiency and quality of solution by 20.3% and 11.11%, respectively.

| [1] |
李维刚,叶欣,赵云涛. 铁水运输调度系统仿真[J]. 计算机应用,2019,39(增2): 206-210.
LI Weigang, YE Xin, ZHAO Yuntao. Simulation of iron melt transportation dispatching system[J]. Journal of Computer Applications, 2019, 39(S2): 206-210.
|
| [2] |
卢绍文,罗小川. “起重机 + 过跨车”铁水物流多场景仿真[J]. 系统仿真学报,2017,29(10): 2549-2555.
LU Shaowen, LUO Xiaochuan. Design of multi-scenario simulation of molten iron logistics system with cranes and cross-train AGVs[J]. Journal of System Simulation, 2017, 29(10): 2549-2555.
|
| [3] |
赵业清. 基于时间影响网络的铁水运输系统时间Petri网建模[J]. 冶金自动化,2015,39(2): 35-40. doi: 10.3969/j.issn.1000-7059.2015.02.007
ZHAO Yeqing. Modeling of molten iron transportation system in the steel enterprise based on time influence net and time Petri net[J]. Metallurgical Industry Automation, 2015, 39(2): 35-40. doi: 10.3969/j.issn.1000-7059.2015.02.007
|
| [4] |
TANG L, JING G, HU G. Steelmaking and refining coordinated scheduling problem with waiting time and transportation consideration[J]. Computers & Industrial Engineering, 2010, 58(2): 239-248.
|
| [5] |
范波,蔡乐才. “一罐制”铁水调度优化模型的研究[J]. 四川理工学院学报(自然科学版),2014,27(1): 49-52.
FAN Bo, CAI Lecai. Research on scheduling optimization model of hot metal can of system[J]. Journal of Sichuan University of Science & Engineering (Natural Science Edition), 2014, 27(1): 49-52.
|
| [6] |
杨小燕,崔炳谋. 钢铁企业铁水运输调度优化与仿真[J]. 计算机应用,2013,33(10): 2977-2980. doi: 10.3724/SP.J.1087.2013.02977
YANG Xiaoyan, CUI Bingmou. Molten iron transportation scheduling optimization and simulation of iron and steel enterprises[J]. Journal of Computer Applications, 2013, 33(10): 2977-2980. doi: 10.3724/SP.J.1087.2013.02977
|
| [7] |
陈在根,李子阳,卢敏,等. 大型钢铁企业铁水物流动态平衡与实时调度技术研究[J]. 计算机应用与软件,2012,29(8): 115-117,179. doi: 10.3969/j.issn.1000-386X.2012.08.030
CHEN Zaigen, LI Ziyang, LU Min, et al. Research on dynamic balance and real-time scheduling of HM logistics in large steel enterprise[J]. Computer Applications and Software, 2012, 29(8): 115-117,179. doi: 10.3969/j.issn.1000-386X.2012.08.030
|
| [8] |
庞新富,黄辉,姜迎春,等. 面向鱼雷罐车运输模式的铁水生产罐次调度方法及应用[J]. 计算机集成制造系统,2018,24(6): 1468-1482.
PANG Xinfu, HUANG Hui, JIANG Yingchun, et al. Hot metal production scheduling method for torpedo car transportation[J]. Computer Integrated Manufacturing Systems, 2018, 24(6): 1468-1482.
|
| [9] |
黄辉,柴天佑,郑秉霖,等. 铁水调度仿真系统的设计与实现[J]. 系统仿真学报,2012,24(6): 1192-1199.
HUANG Hui, CHAI Tianyou, ZHENG Binglin, et al. Design and development of molten iron scheduling simulation system[J]. Journal of System Simulation, 2012, 24(6): 1192-1199.
|
| [10] |
黄辉,罗小川,郑秉霖,等. 炼铁-炼钢区间铁水重调度方法及其应用[J]. 系统工程学报,2013,28(2): 234-247.
HUANG Hui, LUO Xiaochuan, ZHENG Binglin, et al. Hot metal rescheduling method and its application between the iron-making and steel-making stages[J]. Journal of Systems Engineering, 2013, 28(2): 234-247.
|
| [11] |
ROSSI F, VAN BEEK P, WALSH T. Handbook of constraint programming[M]. Amsterdam: Elsevier, 2006
|
| [12] |
马亮,郭进,陈光伟. 编组站静态配流的约束传播和启发式回溯算法[J]. 西南交通大学学报,2014,49(6): 1116-1122.
MA Liang, GUO Jin, CHEN Guangwei. Constraint propagation and heuristics backtracking algorithm for static wagon-flow allocation at a marshalling station[J]. Journal of Southwest Jiaotong University, 2014, 49(6): 1116-1122.
|
| [13] |
OJHA A K, BISWAL K K. Lexicographic multi-objective geometric programming problems[J]. International Journal of Computer Science Issues, 2009, 6(2): 20-24.
|
| [14] |
BECK J C. Solution-guided multi-point constructive search for job shop scheduling[J]. Journal of Artificial Intelligence Research, 2007, 29: 49-77. doi: 10.1613/jair.2169
|
| [15] |
马亮,郭进,陈光伟,等. 铁路编组站动态配流的约束传播和多点构建性搜索的混合算法[J]. 信息与控制,2015,44(2): 230-237. doi: 10.13976/j.cnki.xk.2015.0230
MA Liang, GUO Jin, CHEN Guangwei, et al. Hybrid algorithm of constraint propagation and multi-point constructive search for the dynamic wagon-flow allocation problem at a railway marshalling station[J]. Information and Control, 2015, 44(2): 230-237. doi: 10.13976/j.cnki.xk.2015.0230
|

Figures(7) / Tables(5)


 DownLoad:
DownLoad: