- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | SUN Yougang, XU Junqi, HE Zhenyu, LI Fengxing, CHEN Chen, LIN Guobin. Sliding Mode Cooperative Control of Multi-Electromagnet Suspension System Based on Error Cross Coupling[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 558-565. doi: 10.3969/j.issn.0258-2724.20210924

|
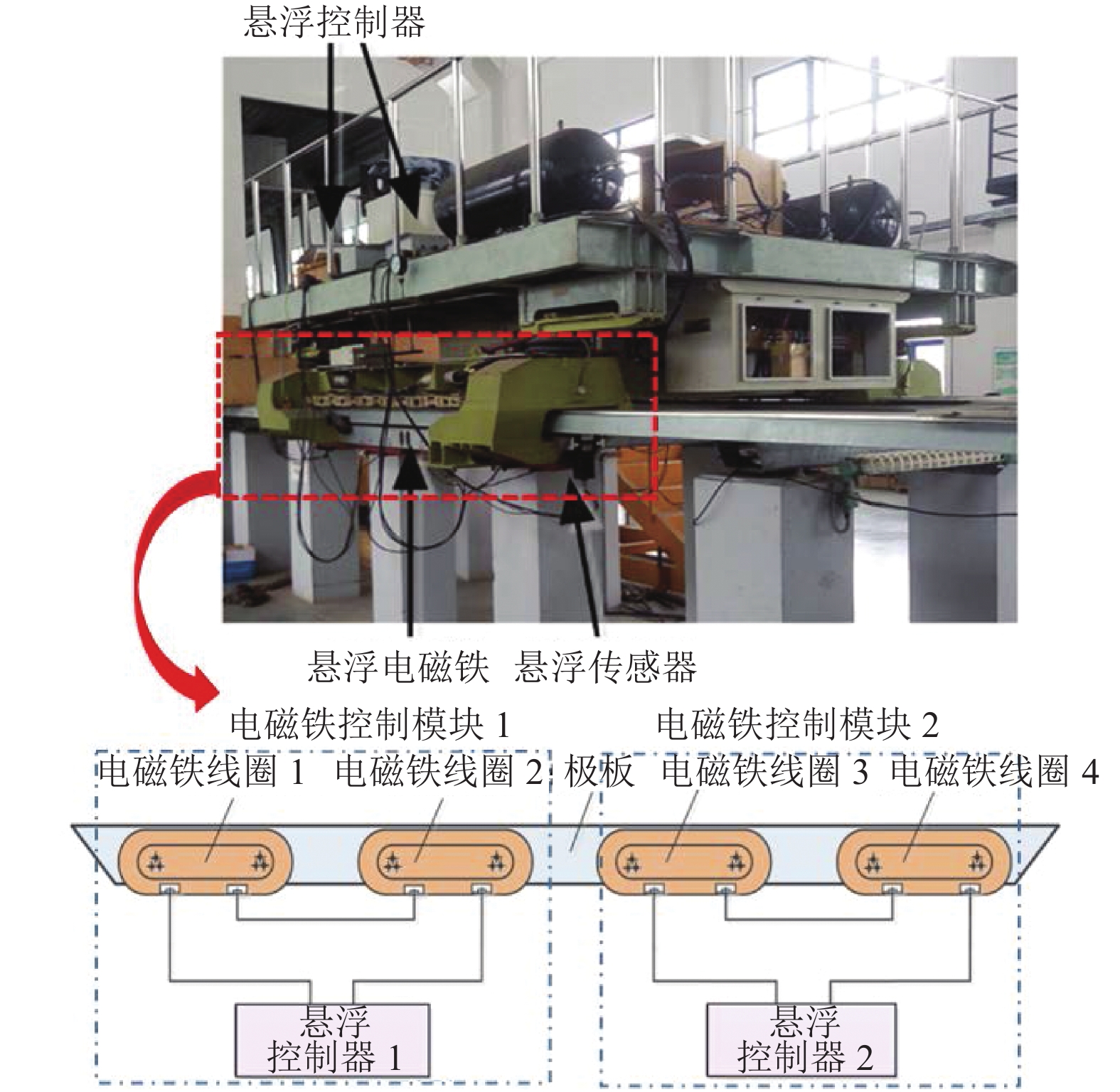
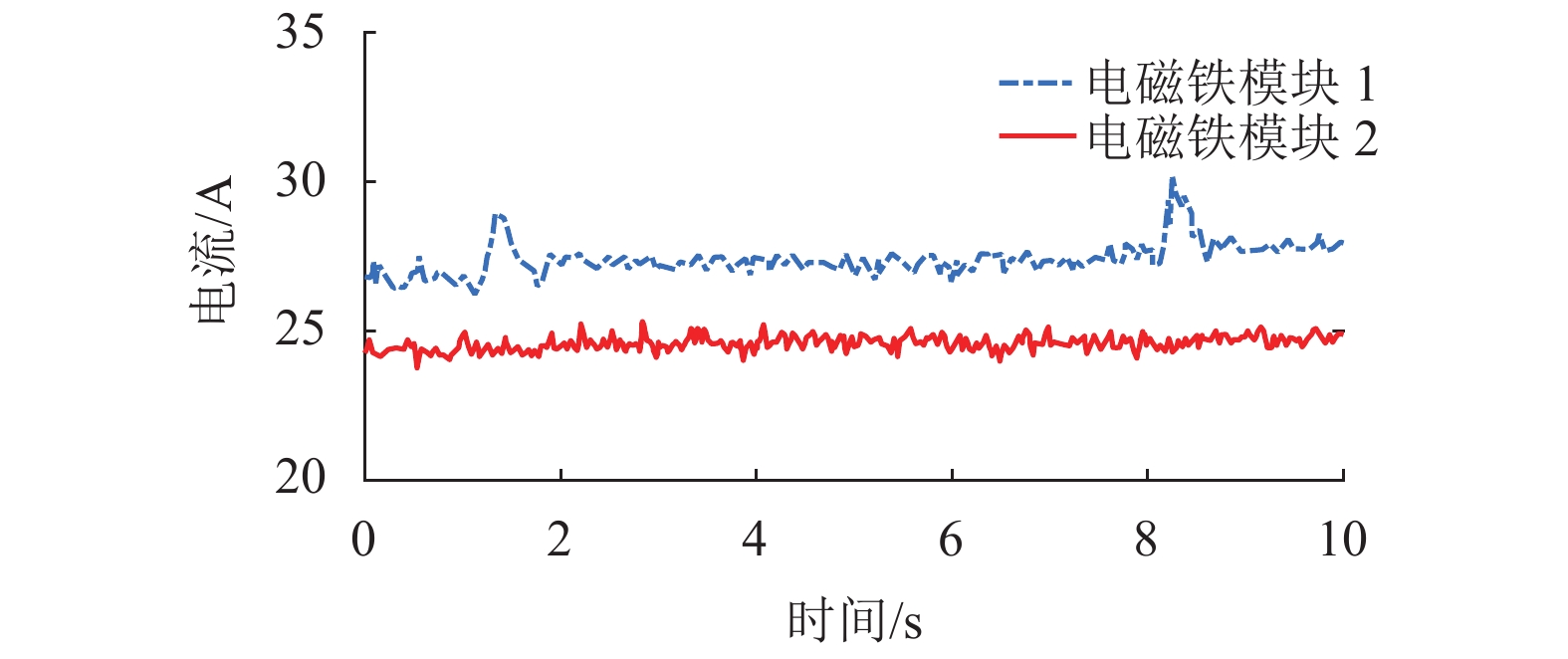
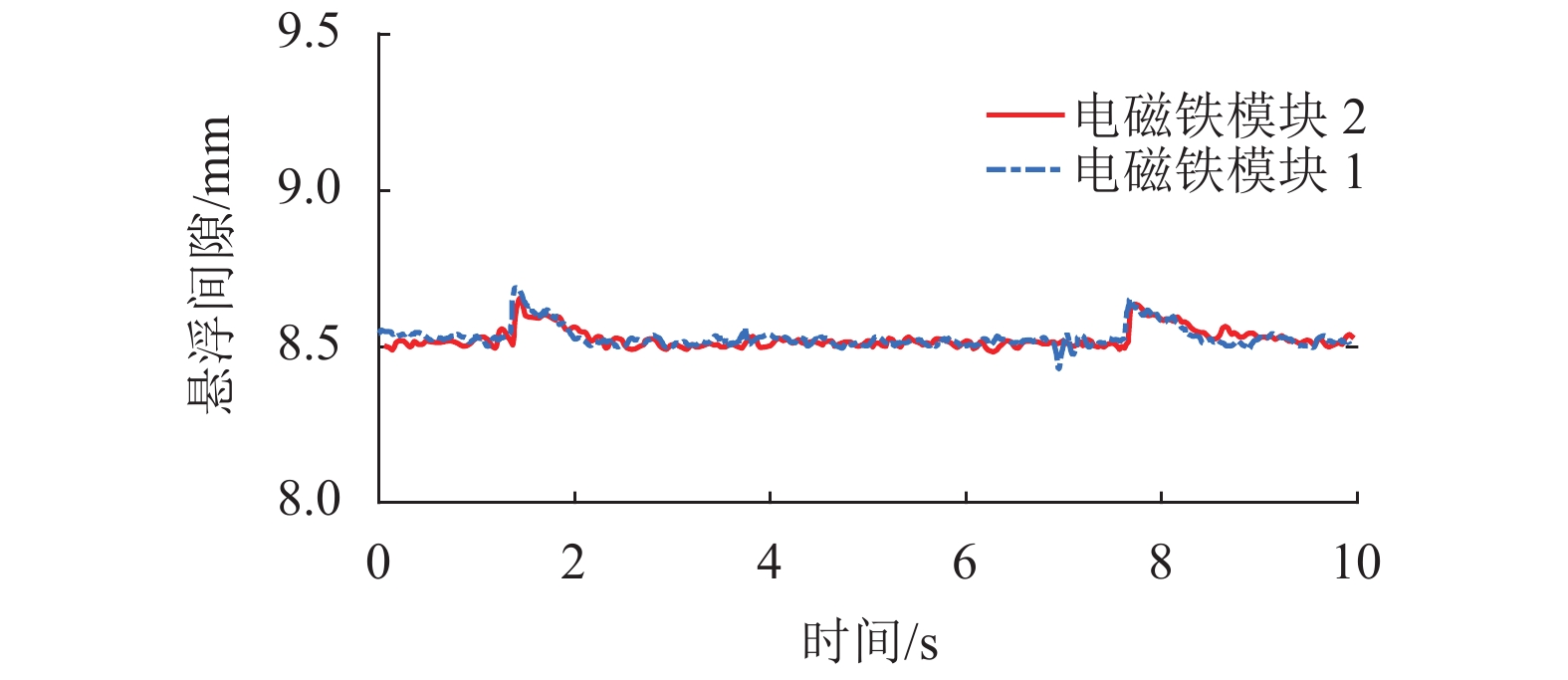
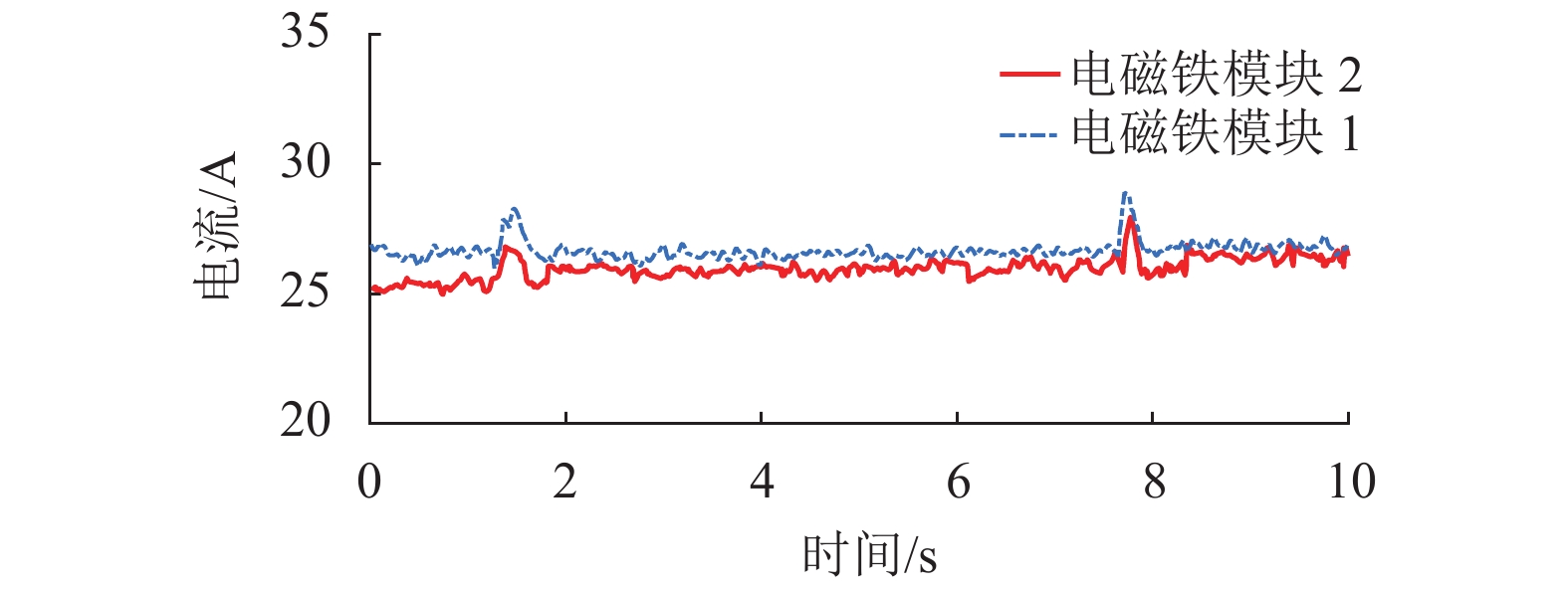
As to the problem that traditional signal point suspension control method of maglev train lacks consideration of coordination and synchronization of multiple electromagnets, a novel coordination control method is developed through tracking error cross-coupling. The novel method can reduce tracking error and synchronization error of multiple points suspension system and enhance anti-disturbance ability at the same time. Firstly, through dynamic analysis, the dynamic equations of four electro magnets (two control modules) suspension system considering unknown disturbance are established. Secondly, in order to estimate and compensate the unknown disturbance of the system, a disturbance observer is introduced. Next, considering the coupling dynamic characteristics of adjacent electromagnet control modules, a sliding mode coordinated controller of error cross coupling is designed. Finally, the asymptotic stability of the closed-loop system is proved without linearization. The experiments show that the presented control method can compensate the coordination relationship of electromagnet modules, suppress the effect of disturbance, reduce the synchronization error by 40%, and inhibit the coupling disturbance between electro magnets significantly.

| [1] |
BOLDEA I, TUTELEA L N, XU W, et al. Linear electric machines, drives, and MAGLEVs: an overview[J]. IEEE Transactions on Industrial Electronics, 2018, 65(9): 7504-7515. doi: 10.1109/TIE.2017.2733492
|
| [2] |
马卫华,罗世辉,张敏,等. 中低速磁浮车辆研究综述[J]. 交通运输工程学报,2021,21(1): 199-216.
MA Weihua, LUO Shihui, ZHANG Min, et al. Research review on medium and low speed maglev vehicle[J]. Journal of Traffic and Transportation Engineering, 2021, 21(1): 199-216.
|
| [3] |
翟婉明,赵春发. 磁浮车辆/轨道系统动力学(I): 磁/轨相互作用及稳定性[J]. 机械工程学报,2005,41(7): 1-10. doi: 10.3321/j.issn:0577-6686.2005.07.001
ZHAI Wanming, ZHAO Chunfa. Dynamics of maglev vehicle/guideway systems(I): magnet/rail interaction and system stability[J]. Chinese Journal of Mechanical Engineering, 2005, 41(7): 1-10. doi: 10.3321/j.issn:0577-6686.2005.07.001
|
| [4] |
赵春发,翟婉明. 磁浮车辆/轨道系统动力学(Ⅱ): 建模与仿真[J]. 机械工程学报,2005,41(8): 163-175. doi: 10.3321/j.issn:0577-6686.2005.08.029
ZHAO Chunfa, ZHAI Wanming. Dynamics of maglev vehicle/guideway systems(Ⅱ): modeling and simulation[J]. Chinese Journal of Mechanical Engineering, 2005, 41(8): 163-175. doi: 10.3321/j.issn:0577-6686.2005.08.029
|
| [5] |
蒋启龙,张昆仑,李熹. 单磁铁悬浮系统的数字控制[J]. 铁道学报,1999,21(5): 45-48.
JIANG Qilong, ZHANG Kunlun, LI Xi. Digital control for single-magnet suspension system[J]. Journal of the China Railway Society, 1999, 21(5): 45-48.
|
| [6] |
龙志强,洪华杰,周晓兵. 磁浮列车的非线性控制问题研究[J]. 控制理论与应用,2003,20(3): 399-402. doi: 10.3969/j.issn.1000-8152.2003.03.016
LONG Zhiqiang, HONG Huajie, ZHOU Xiaobing. Research of nonlinear control for maglev train[J]. Control Theory & Applications, 2003, 20(3): 399-402. doi: 10.3969/j.issn.1000-8152.2003.03.016
|
| [7] |
汪科任,罗世辉,张继业. 磁悬浮控制器设计及静悬浮稳定性分析[J]. 西南交通大学学报,2017,52(1): 118-126. doi: 10.3969/j.issn.0258-2724.2017.01.017
WANG Keren, LUO Shihui, ZHANG Jiye. Design of magnetic levitation controller and static stability analysis[J]. Journal of Southwest Jiaotong University, 2017, 52(1): 118-126. doi: 10.3969/j.issn.0258-2724.2017.01.017
|
| [8] |
王亮,王立德,王永翔. 多点悬浮系统的解耦及控制系统设计[J]. 自动化技术与应用,2004,23(1): 12-15. doi: 10.3969/j.issn.1003-7241.2004.01.004
WANG Liang, WANG Lide, WANG Yongxiang. Decoupling of multispot suspension system and its control design[J]. Techniques of Automation and Applications, 2004, 23(1): 12-15. doi: 10.3969/j.issn.1003-7241.2004.01.004
|
| [9] |
李奇南,徐德鸿. 四电磁铁支撑钢板磁悬浮系统气隙交叉耦合控制[J]. 中国电机工程学报,2010,30(33): 129-134.
LI Qinan, XU Dehong. Gap cross-coupling control for 4-electromagnet supported steel plate magnetic suspension system[J]. Proceedings of the CSEE, 2010, 30(33): 129-134.
|
| [10] |
徐俊起,林国斌,陈琛,等. 负载扰动下磁浮车辆多点悬浮建模与控制[J]. 同济大学学报(自然科学版),2020,48(9): 1353-1363. doi: 10.11908/j.issn.0253-374x.20103
XU Junqi, LIN Guobin, CHEN Chen, et al. Modeling and control of multi-point levitation of maglev vehicle under loading disturbance[J]. Journal of Tongji University (Natural Science), 2020, 48(9): 1353-1363. doi: 10.11908/j.issn.0253-374x.20103
|
| [11] |
赵伟. 磁浮列车多点悬浮系统的无模型自适应控制器模块化设计方法研究[D]. 北京: 北京交通大学, 2020.
|
| [12] |
徐秀栋,黄攀峰,孟中杰. 空间绳系机器人逼近目标协调控制方法[J]. 航空学报,2013,34(5): 1222-1231.
XU Xiudong, HUANG Panfeng, MENG Zhongjie. Coordinated control method of space tethered robot for approaching targets[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(5): 1222-1231.
|
| [13] |
褚文博,罗禹贡,韩云武,等. 基于规则的分布式电驱动车辆驱动系统失效控制[J]. 机械工程学报,2012,48(10): 90-95,102. doi: 10.3901/JME.2012.10.090
CHU Wenbo, LUO Yugong, HAN Yunwu, et al. Rule-based traction system failure control of distributed electric drive vehicle[J]. Journal of Mechanical Engineering, 2012, 48(10): 90-95,102. doi: 10.3901/JME.2012.10.090
|
| [14] |
张昭遂,孙元章,李国杰,等. 超速与变桨协调的双馈风电机组频率控制[J]. 电力系统自动化,2011,35(17): 20-25,43.
ZHANG Zhaosui, SUN Yuanzhang, LI Guojie, et al. Frequency regulation by doubly fed induction generator wind turbines based on coordinated overspeed control and pitch control[J]. Automation of Electric Power Systems, 2011, 35(17): 20-25,43.
|
| [15] |
王树宏,孙友刚,董达善. 基于观测器和输出受限的磁浮列车悬浮控制[J]. 控制工程,2020,27(8): 1440-1444.
WANG Shuhong, SUN Yougang, DONG Dashan. Suspension control for maglev train systems based on state observer and output constraints[J]. Control Engineering of China, 2020, 27(8): 1440-1444.
|
| [16] |
张敏,马卫华,李铁,等. 线圈串接方式对悬浮控制性能的影响仿真[J]. 机械工程学报,2019,55(12): 149-156. doi: 10.3901/JME.2019.12.149
ZHANG Min, MA Weihua, LI Tie, et al. Simulation of the influence of coil connectionmode on levitation control performance[J]. Journal of Mechanical Engineering, 2019, 55(12): 149-156. doi: 10.3901/JME.2019.12.149
|
| [17] |
孙友刚,李万莉,林国斌,等. 低速磁浮列车悬浮系统动力学建模及非线性控制[J]. 同济大学学报(自然科学版),2017,45(5): 741-749.
SUN Yougang, LI Wanli, LIN Guobin, et al. Dynamic modeling and nonlinear control research on magnetic suspension systems of low-speed maglev train[J]. Journal of Tongji University (Natural Science), 2017, 45(5): 741-749.
|

Figures(8) / Tables(1)



 DownLoad:
DownLoad: