- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | XU Shaoguang, XIONG Yongliang, ZHANG Wenhao, WANG Dejun. Undifferenced Precise GPS Processing Software PLAOD and Its Performance Analysis[J]. Journal of Southwest Jiaotong University, 2023, 58(1): 159-166. doi: 10.3969/j.issn.0258-2724.20210596

|
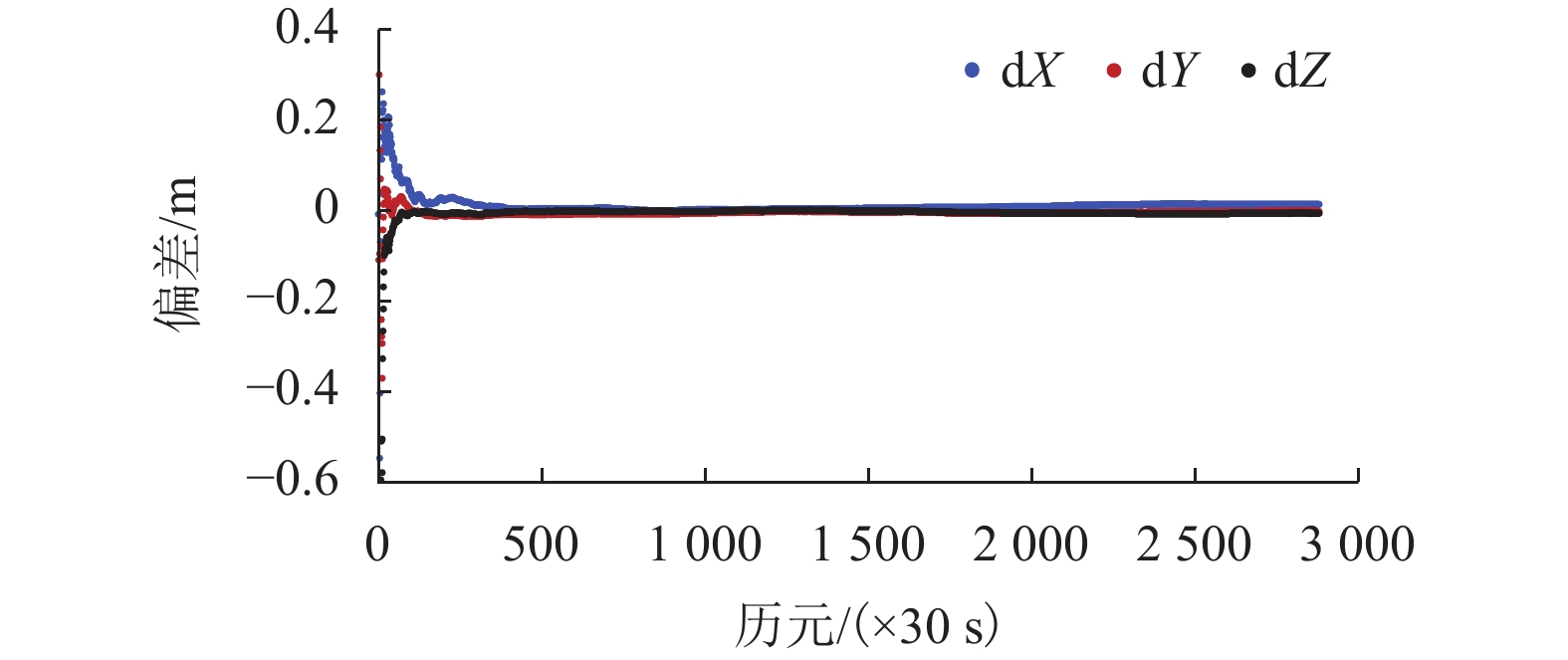
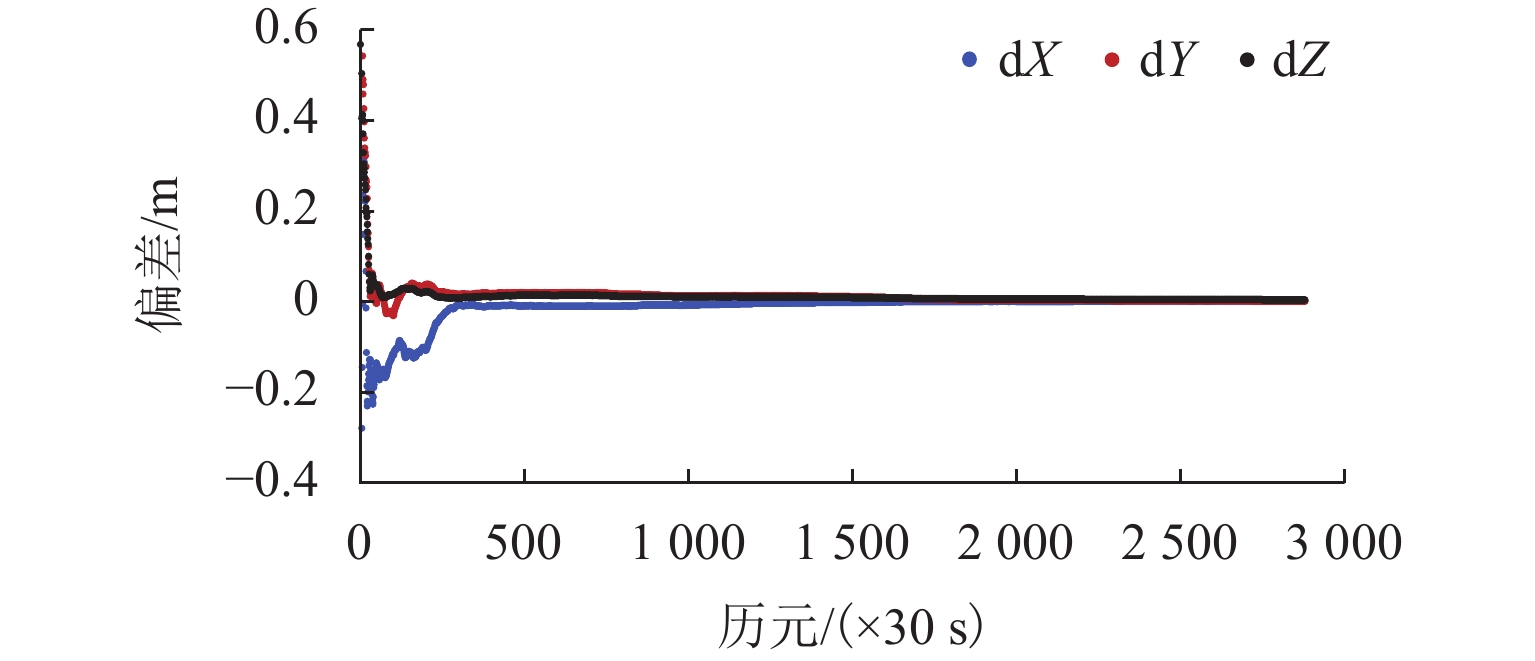
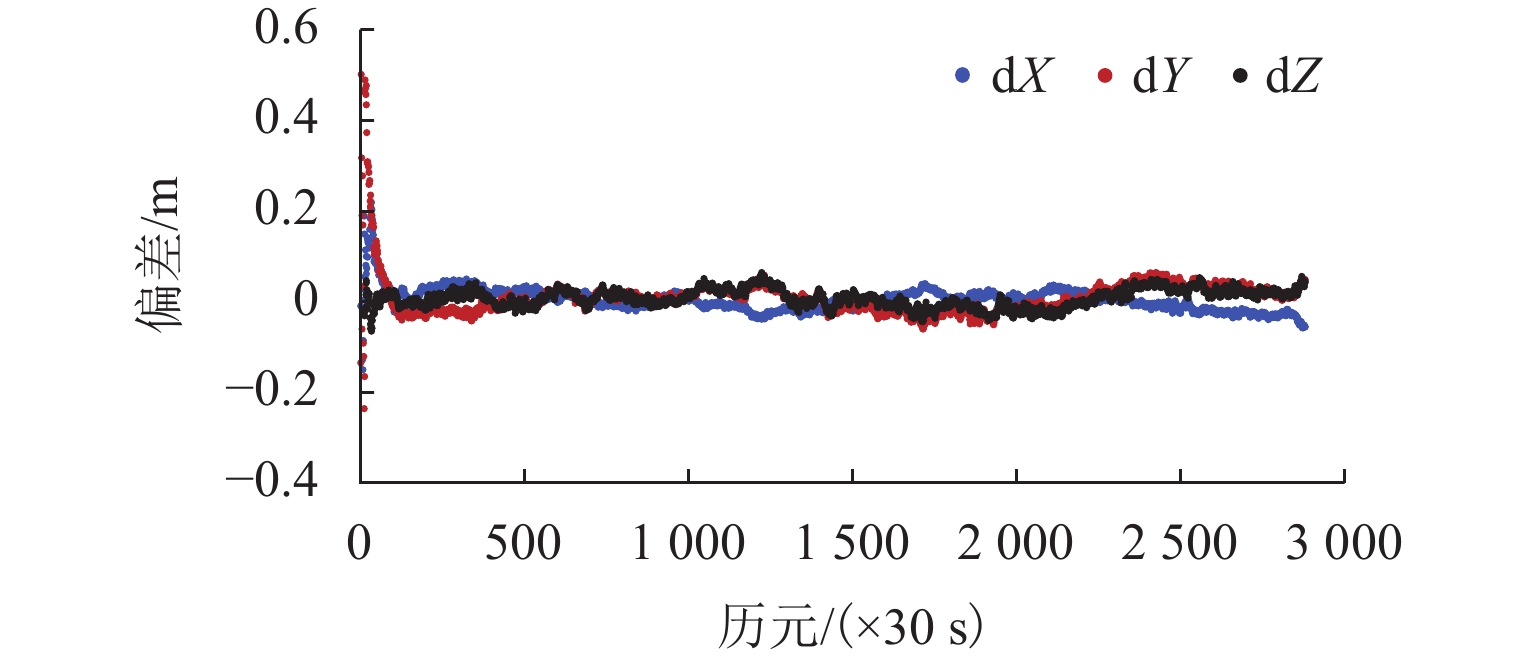
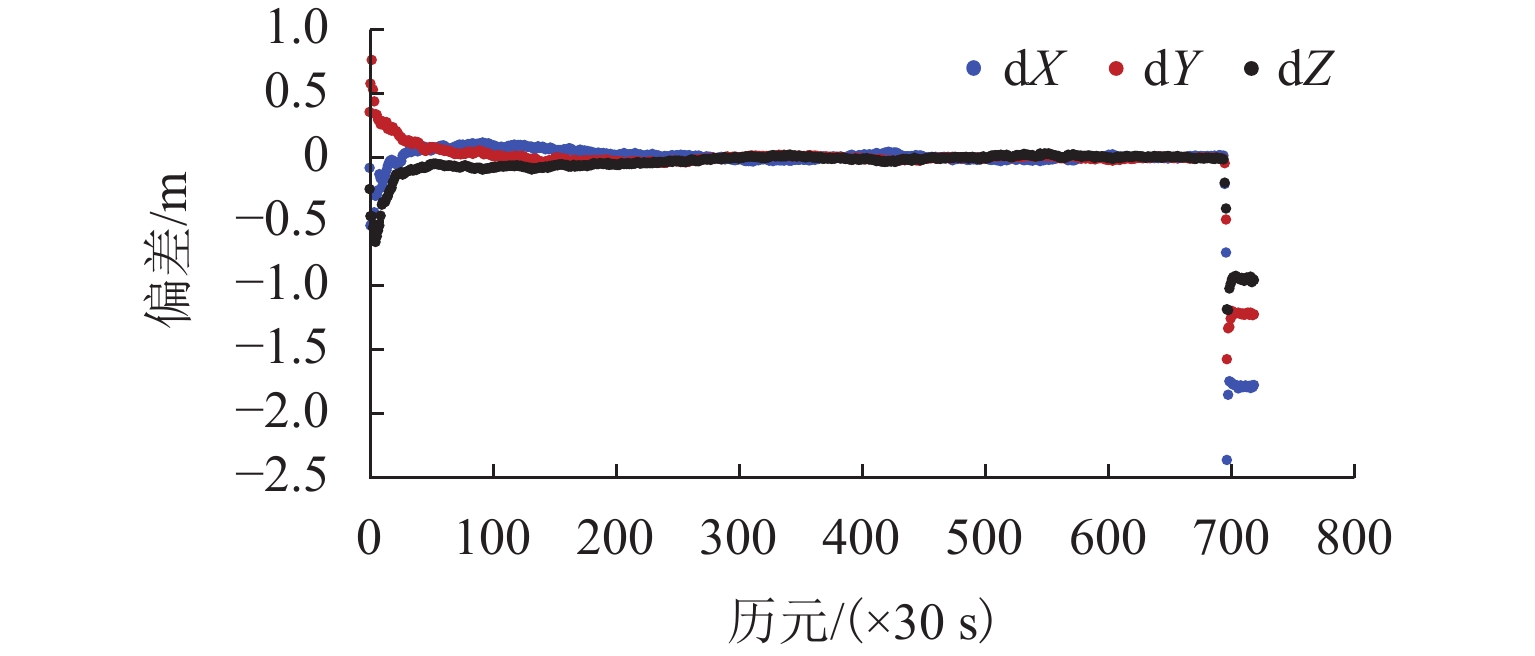
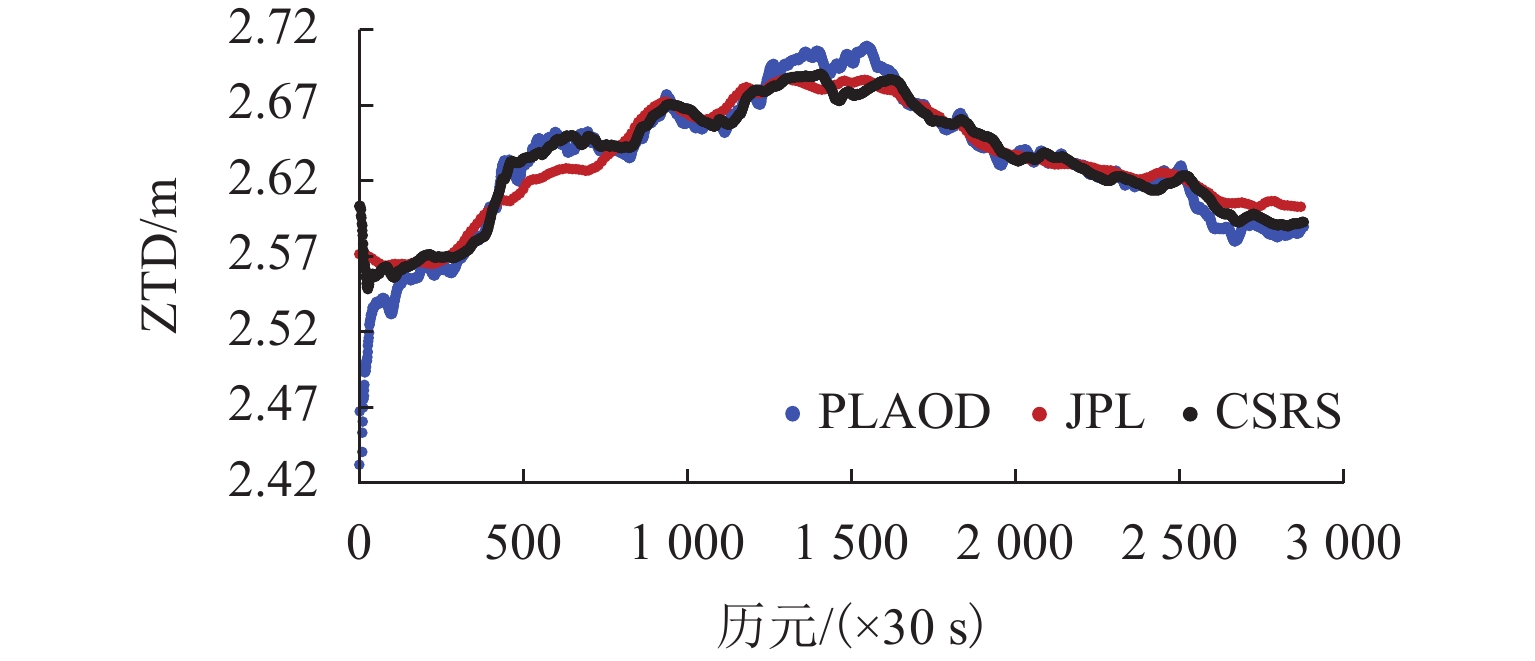
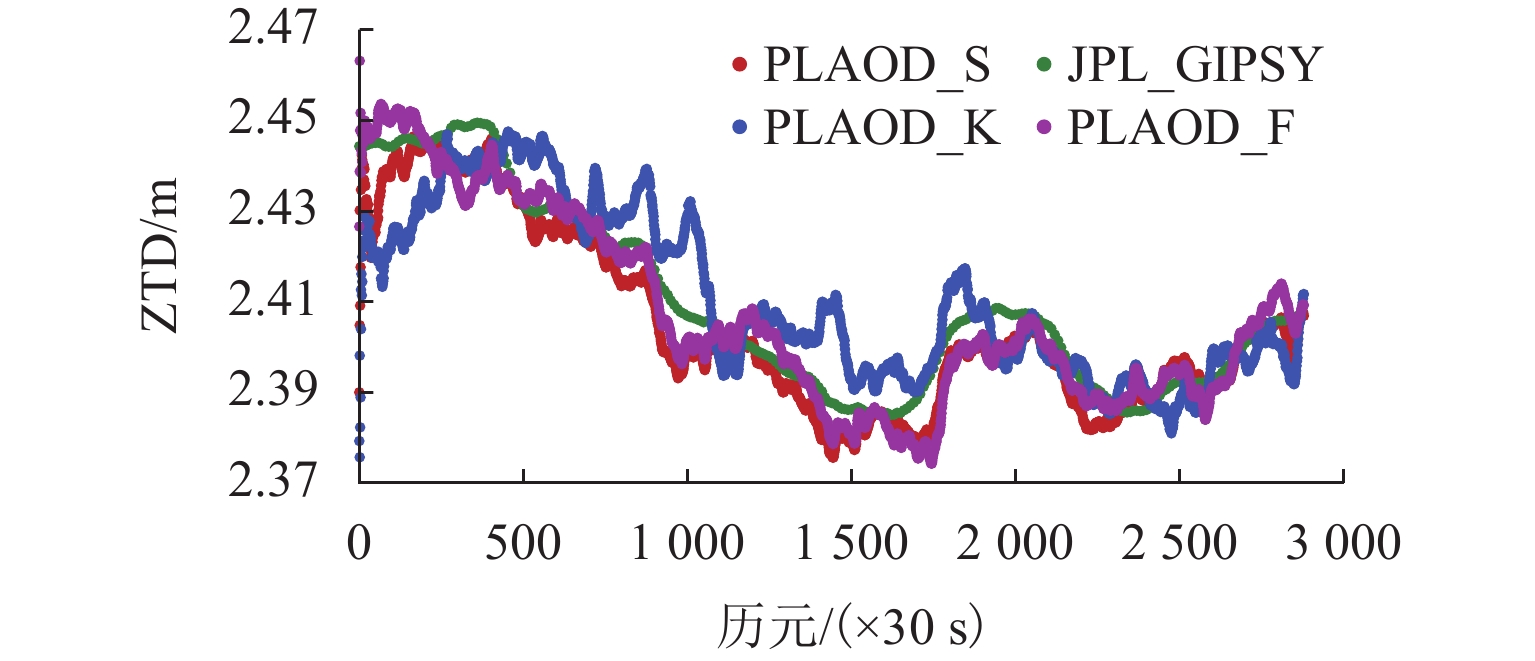
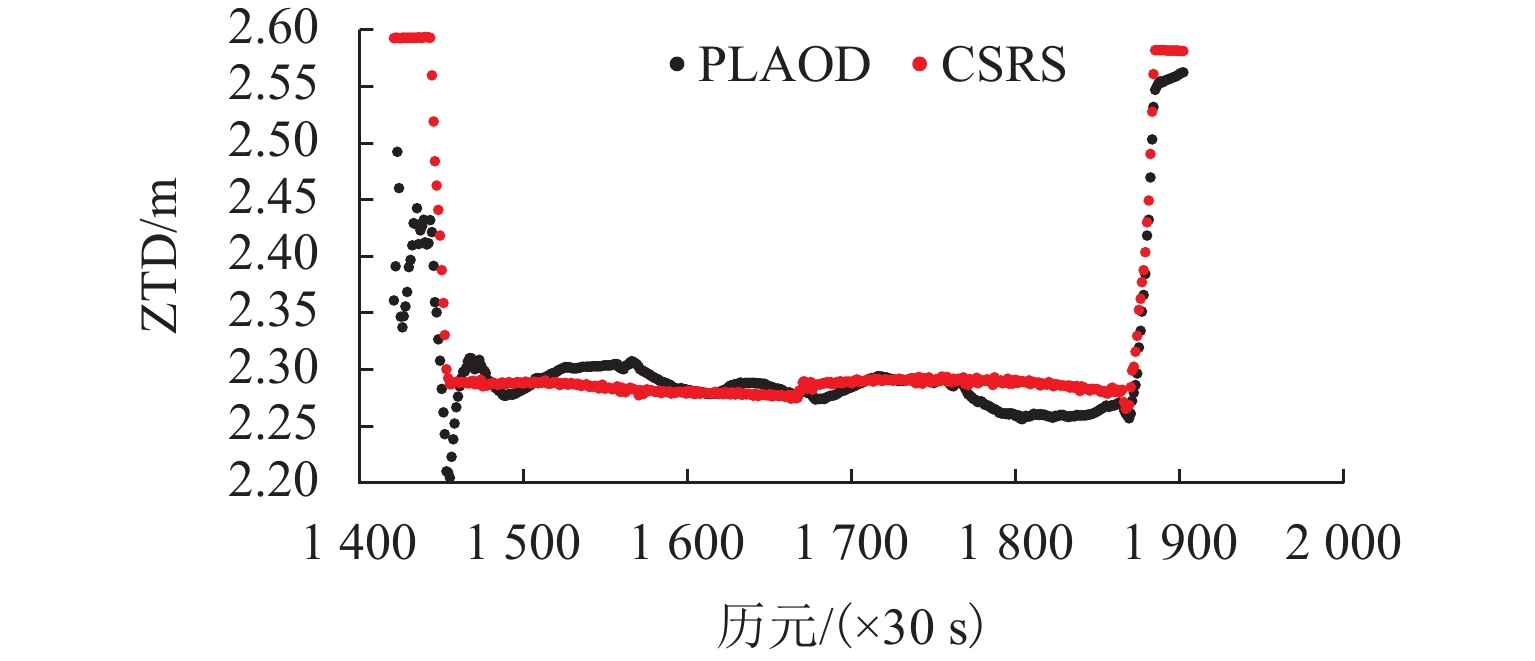
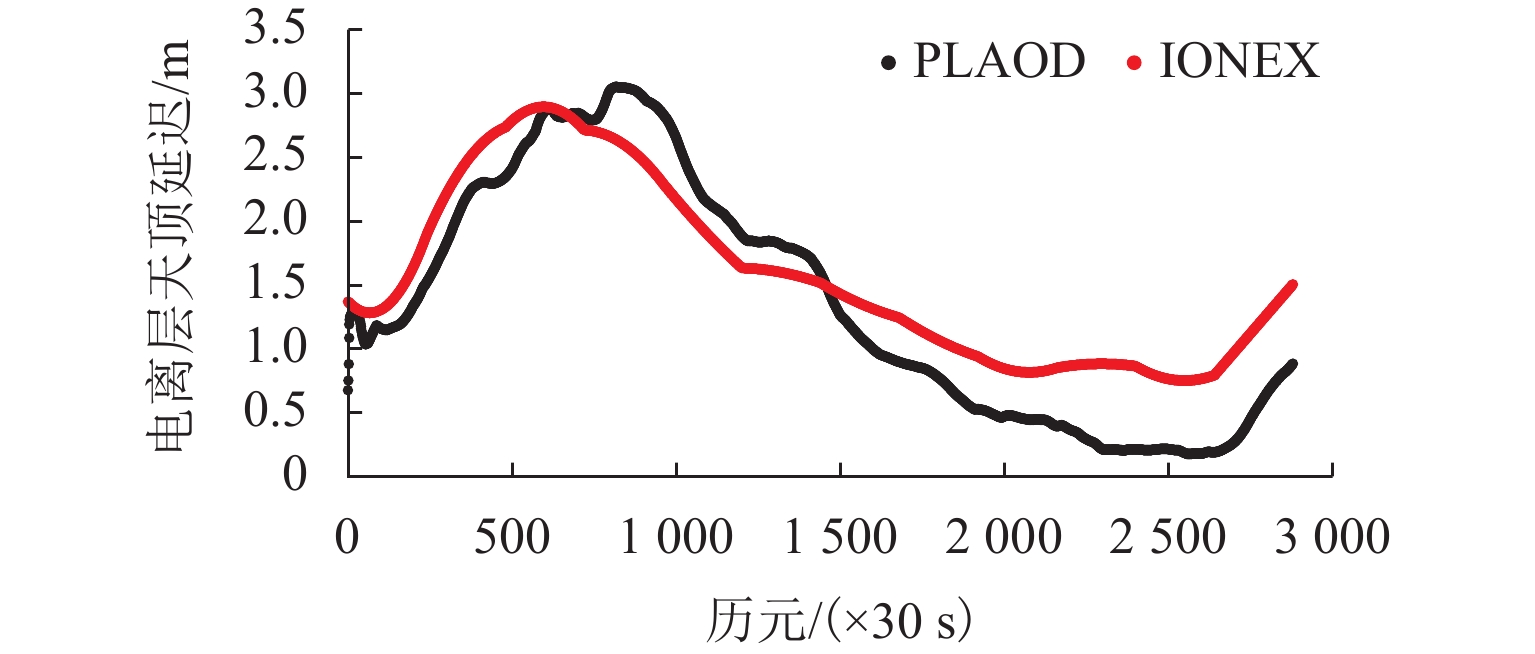
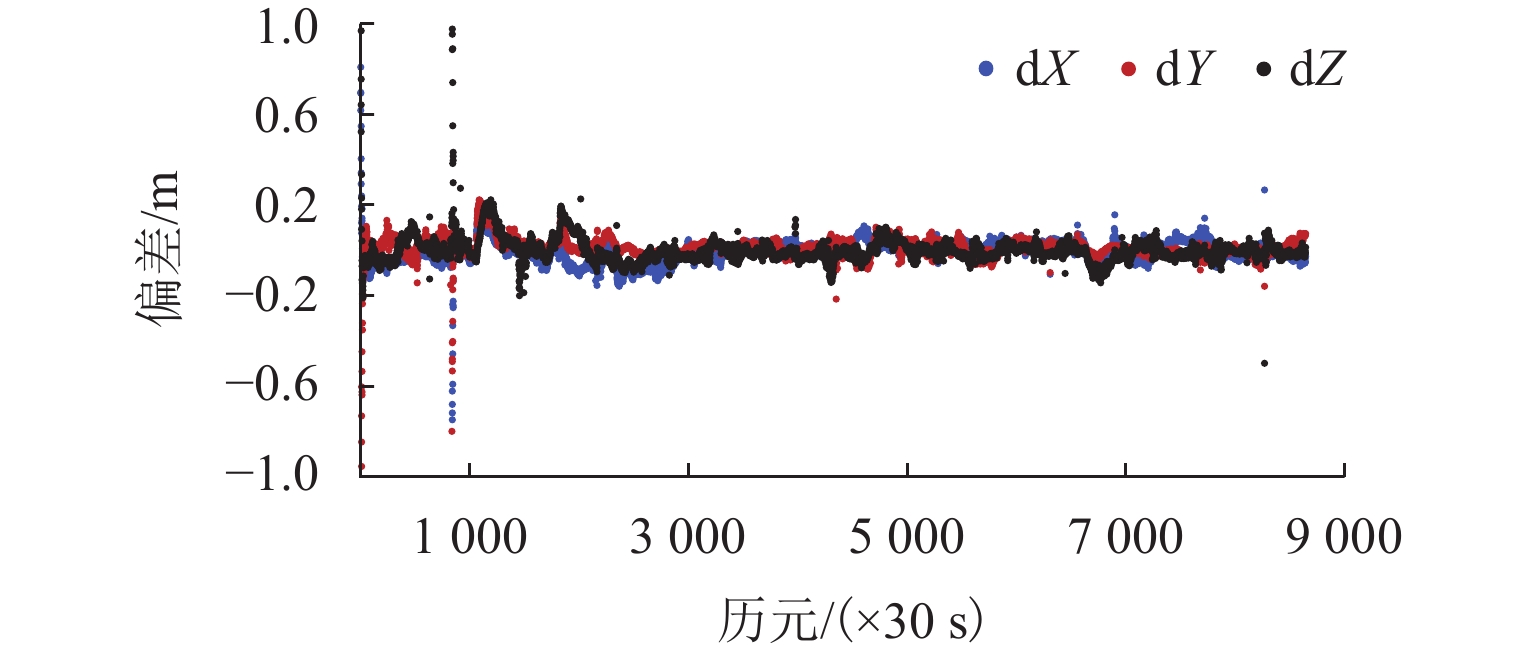
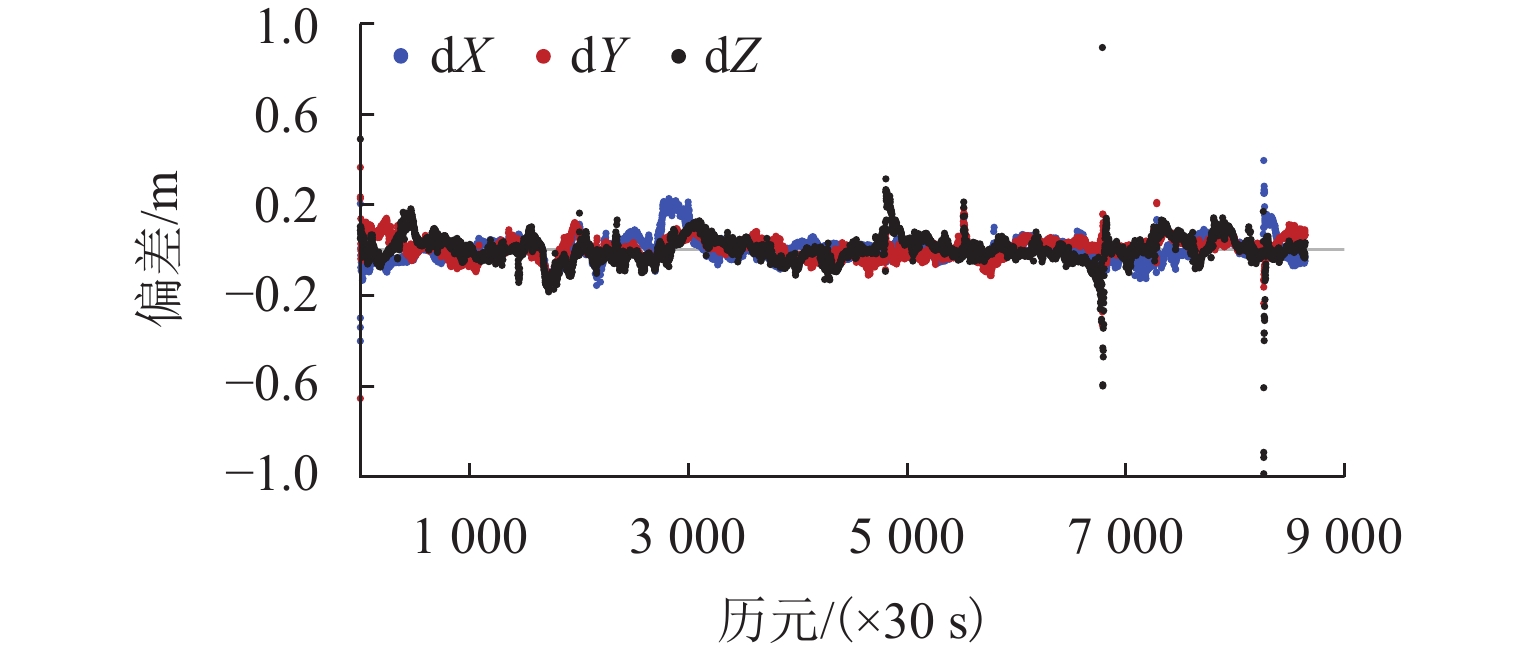
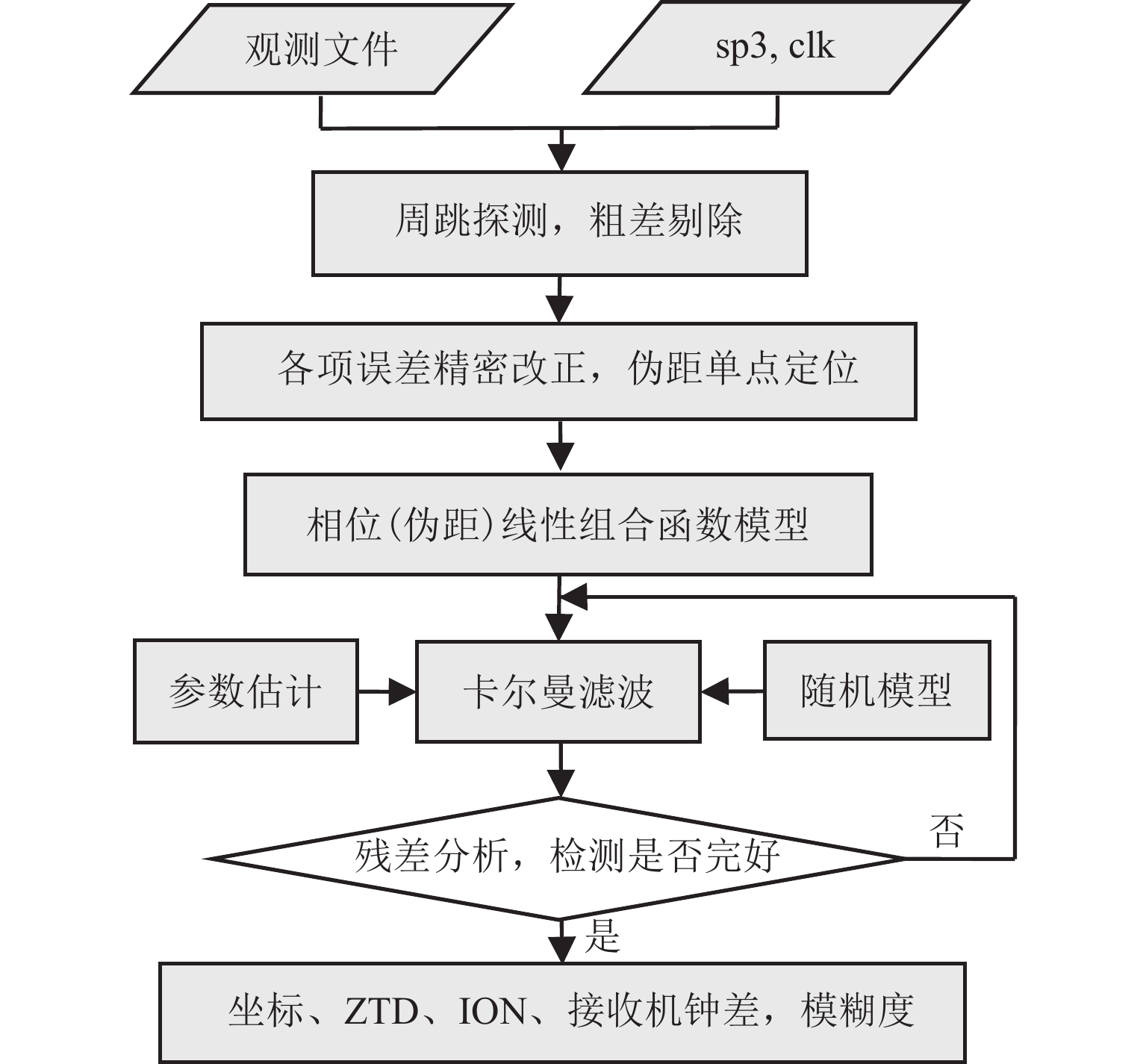
PLAOD (precise location and orbit determination) is an undifferenced precise GPS data processing software for positioning and orbit determination fully developed by Southwest Jiaotong University. Currently, the software can process GPS observation data, and has the functions of precise positioning, atmospheric inversion and orbit determination for low earth obiter. Following the introduction to basic theory of PLAOD, its performance is focused. Multiple sets of GPS observation data were tested. Compared with the precise product provided by IGS (international GNSS service) and other institutes, PLAOD has shown following features. The static positioning accuracy can reach millimeter level, the kinematic positioning accuracy can reach centimeter level, the estimation precision of the tropospheric zenith delay in static mode is usually better than 1 cm, and the one in kinematic mode is better than 2 cm. There is a high consistence between the ionospheric zenith delay results from PLAOD and the IONEX (ionosphere exchange) product of IGS. In comparison with the reduced dynamic orbit of low earth orbiter provided by JPL (jet propulsion laboratory), the accuracy of orbit determined by geometry method is usually at the centimeter level.

| [1] |
ZUMBERGE J F, HEFLIN M B, JEFFERSON D C, et al. Precise point positioning for the efficient and robust analysis of GPS data from large networks[J]. Journal of Geophysical Research, 1997, 102(B3): 5005-5017. doi: 10.1029/96JB03860
|
| [2] |
KOUBA J, HÉROUX P. Precise point positioning using IGS orbit and clock products[J]. GPS Solutions, 2001, 5(2): 12-28. doi: 10.1007/PL00012883
|
| [3] |
GAO, Y, SHEN, X. A new method for carrier phase based precise point positioning[J]. Navigation, 2002, 49(2): 109-116. doi: 10.1002/j.2161-4296.2002.tb00260.x
|
| [4] |
张小红,李星星,李盼. GNSS精密单点定位技术及应用进展[J]. 测绘学报,2017,46(10): 1399-1407. doi: 10.11947/j.AGCS.2017.20170327
ZHANG Xiaohong, LI Xingxing, LI Pan. Review of GNSS PPP and its application[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(10): 1399-1407. doi: 10.11947/j.AGCS.2017.20170327
|
| [5] |
GENG Jianghui. Rapid integer ambiguity resolution in GPS precise point positioning[D]. Nottingham: University of Nottingham, 2010.
|
| [6] |
SIMON B, RICHARD B. L, MARCELO C. S. The precise point positioning software centre: an insight into online PPP services[R]. Buenos Aires: IAG, 2009.
|
| [7] |
IBANEZ D, ROVIRA G A, SANZ J, et al. The GNSS laboratory tool suite (gLAB) updates: SBAS, DGNSS and global monitoring system[C]//9th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing. Noordwijk: IEEE, 2018: 1-11.
|
| [8] |
TAKASU T. RTKLIB: open source program Package for RTK-GPS[R]. Tokyo: Tokyo University of Marine Science and Technology, 2009.
|
| [9] |
GENG J H, CHEN X Y, PAN Y X, et al. PRIDE PPP-AR: an open-source software for GPS PPP ambiguity resolution[J]. GPS Solutions, 2019, 23(4): 1-10.
|
| [10] |
BANVILLE S, GENG J H, LOYER S, et al. On the interoperability of IGS products for precise point positioning with ambiguity resolution[J]. Journal of Geodesy, 2020, 94(1): 1-15. doi: 10.1007/s00190-019-01332-z
|
| [11] |
ASHBY N. Relativity in the global positioning system[J]. Living Reviews in Relativity, 2003, 6(1): 1-42. doi: 10.12942/lrr-2003-1
|
| [12] |
PETIT G, LUZUM B. IERS Conventions (2010) [EB/OL]. [2021-7-26]. https://www.iers.org/IERS/EN/Publications/TechnicalNotes/tn36.html.
|
| [13] |
WU J T, WU S C, HAJJ G A, et al. Effects of antenna orientation on GPS carrier phase[J]. Manuscripta Geodaetica, 1993, 18(2): 91-98.
|
| [14] |
WELCH G, BISHOP G. An introduction to the Kalman filter[EB/OL]. [2021-07-26]. https://www.cs.unc.edu/~welch/media/pdf/kalman_intro.pdf
|
| [15] |
GUO J Y, YUAN Y D, KONG Q L, et al. Deformation caused by the 2011 eastern Japan great earthquake monitored using the GPS single-epoch precise point positioning technique[J]. Applied Geophysics, 2012, 9(4): 483-493. doi: 10.1007/s11770-012-0360-2
|
| [16] |
KOUBA J. Implementation and testing of the gridded Vienna mapping function 1 (VMF1)[J]. Journal of Geodesy, 2008, 82(4/5): 193-205.
|
| [17] |
BOEHM J, NIELL A, TREGONING P, et al. Global mapping function: a new empirical mapping function based on numerical weather model data[J]. Geophysical Research Letters, 2006, 33(7): 304-317.
|
| [18] |
BOEHM J, HEINKELMANN R, SCHUH H. Short note: a global model of pressure and temperature for geodetic applications[J]. Journal of Geodesy, 2007, 81(10): 679-683. doi: 10.1007/s00190-007-0135-3
|
Figures(11) / Tables(4)


 DownLoad:
DownLoad: