- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | WANG Hengli, WANG Ruitian, GAO Shan, JIE Guisheng. Three-Phase Isolated Inverter with Wide-Voltage Input, High Power Density and Low Noise[J]. Journal of Southwest Jiaotong University, 2022, 57(6): 1358-1367. doi: 10.3969/j.issn.0258-2724.20210326

|
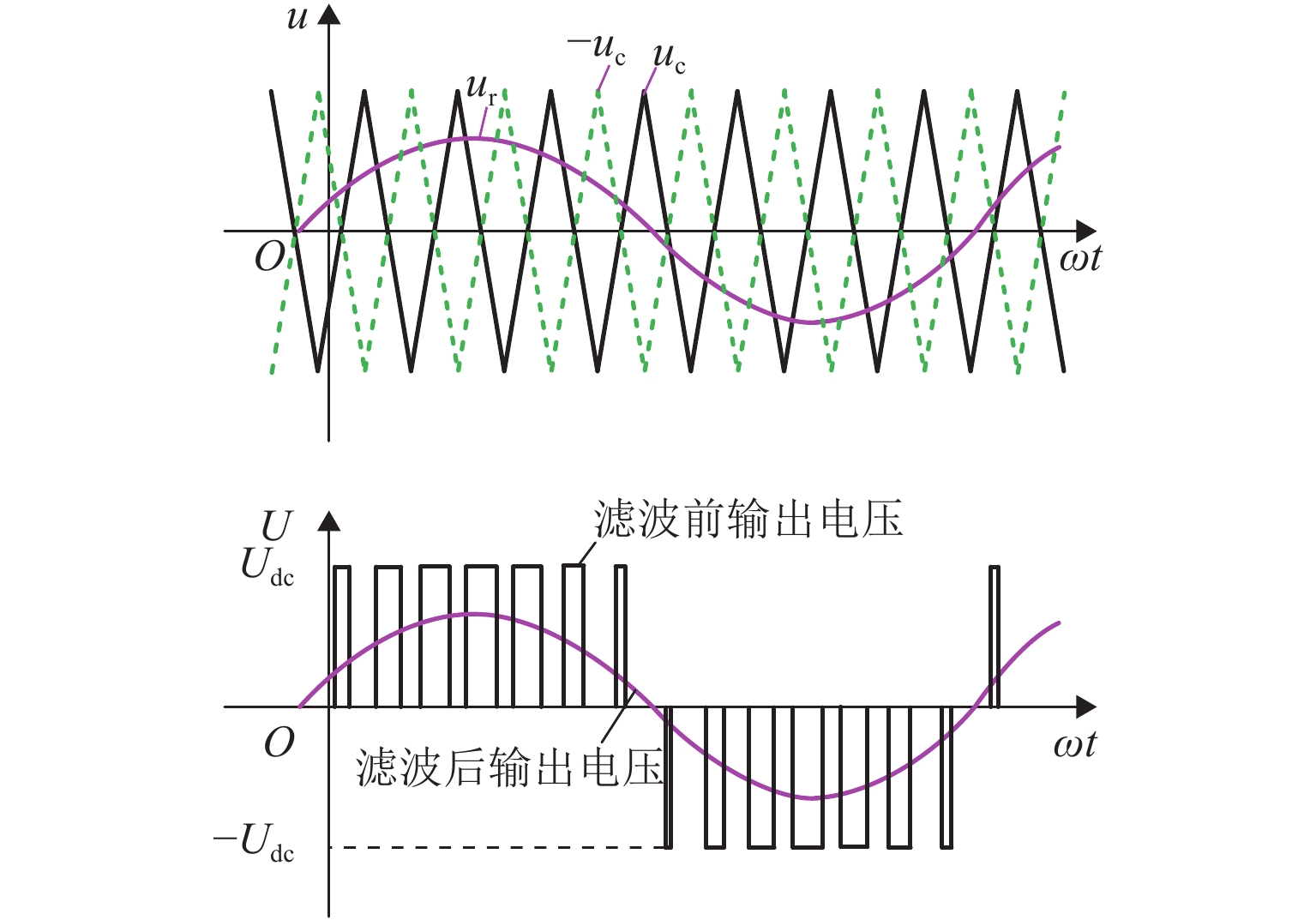
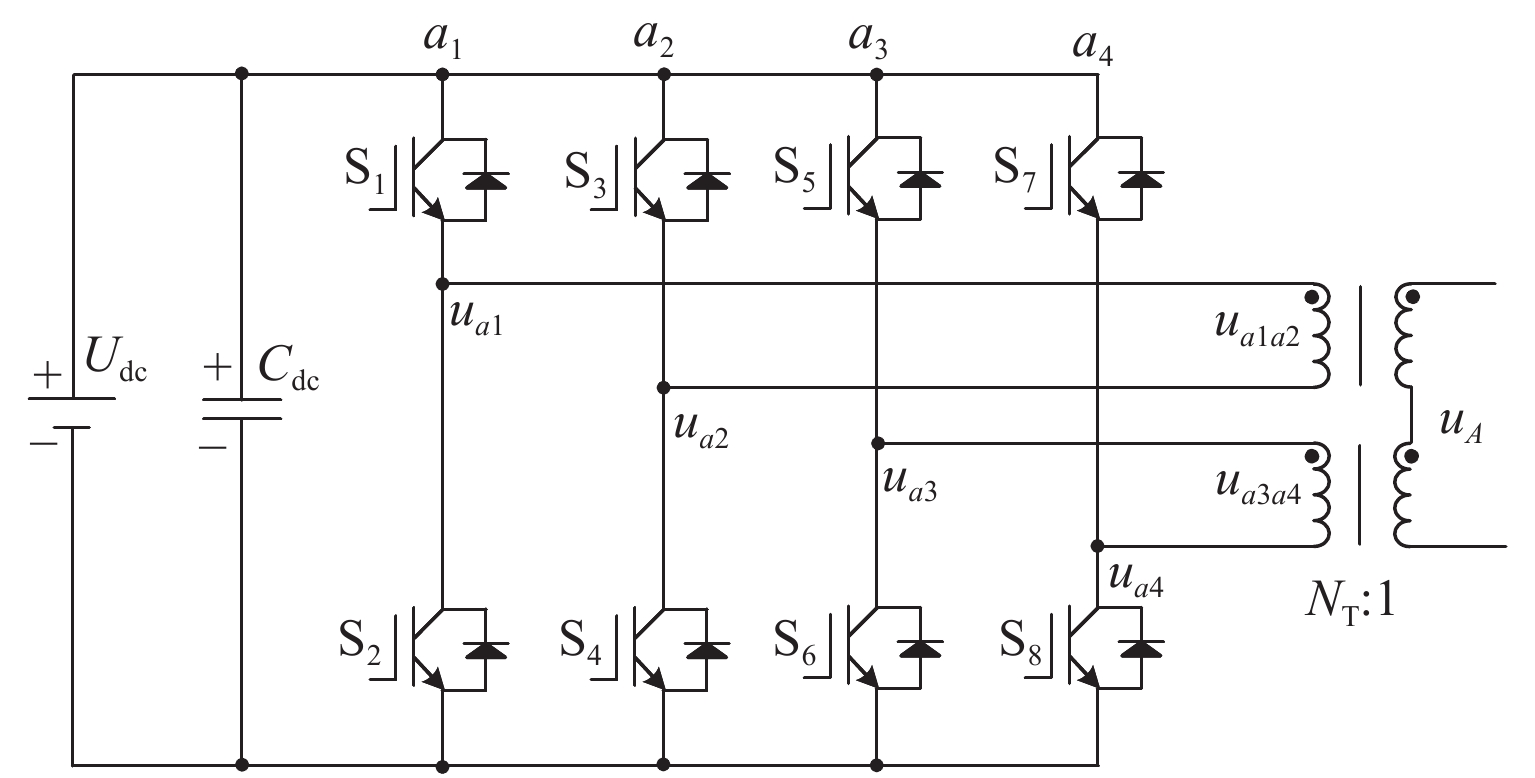
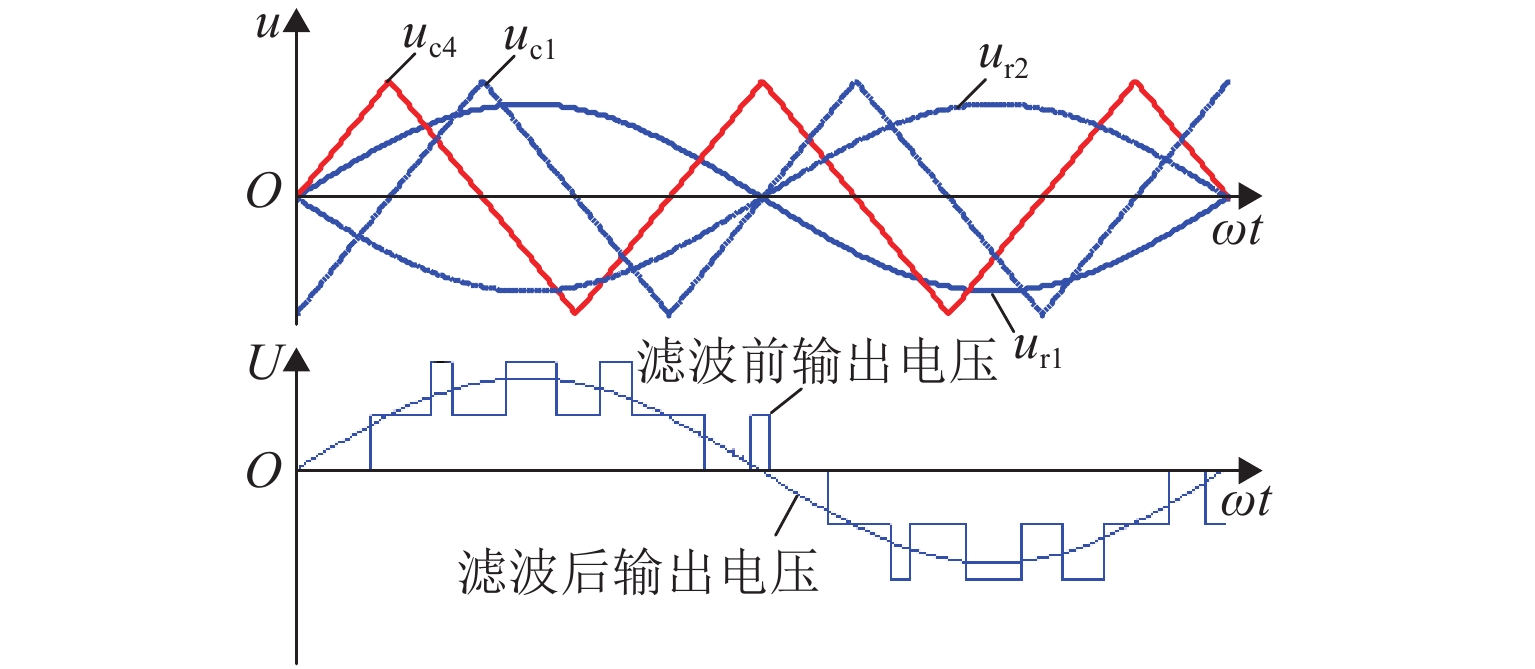
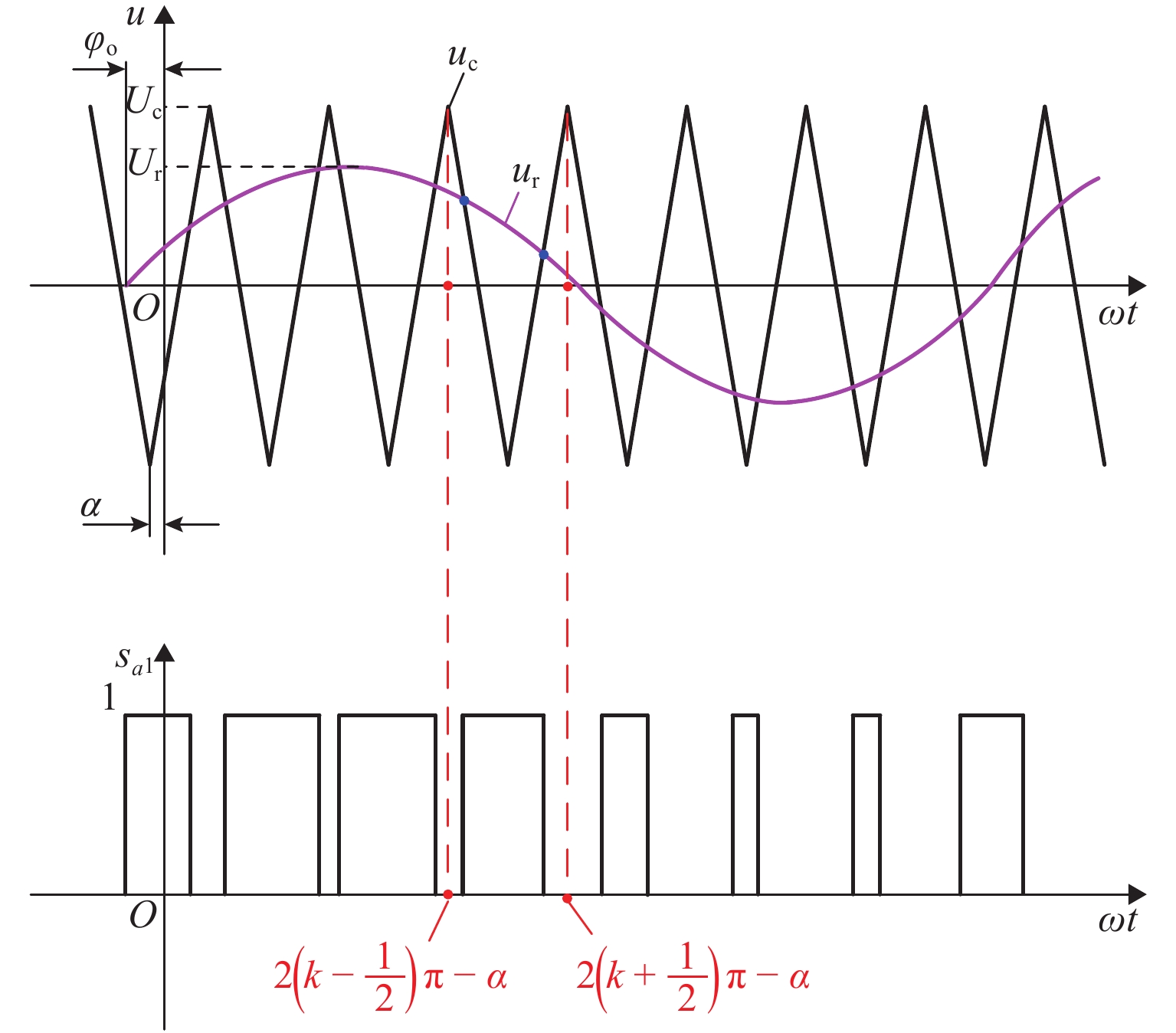
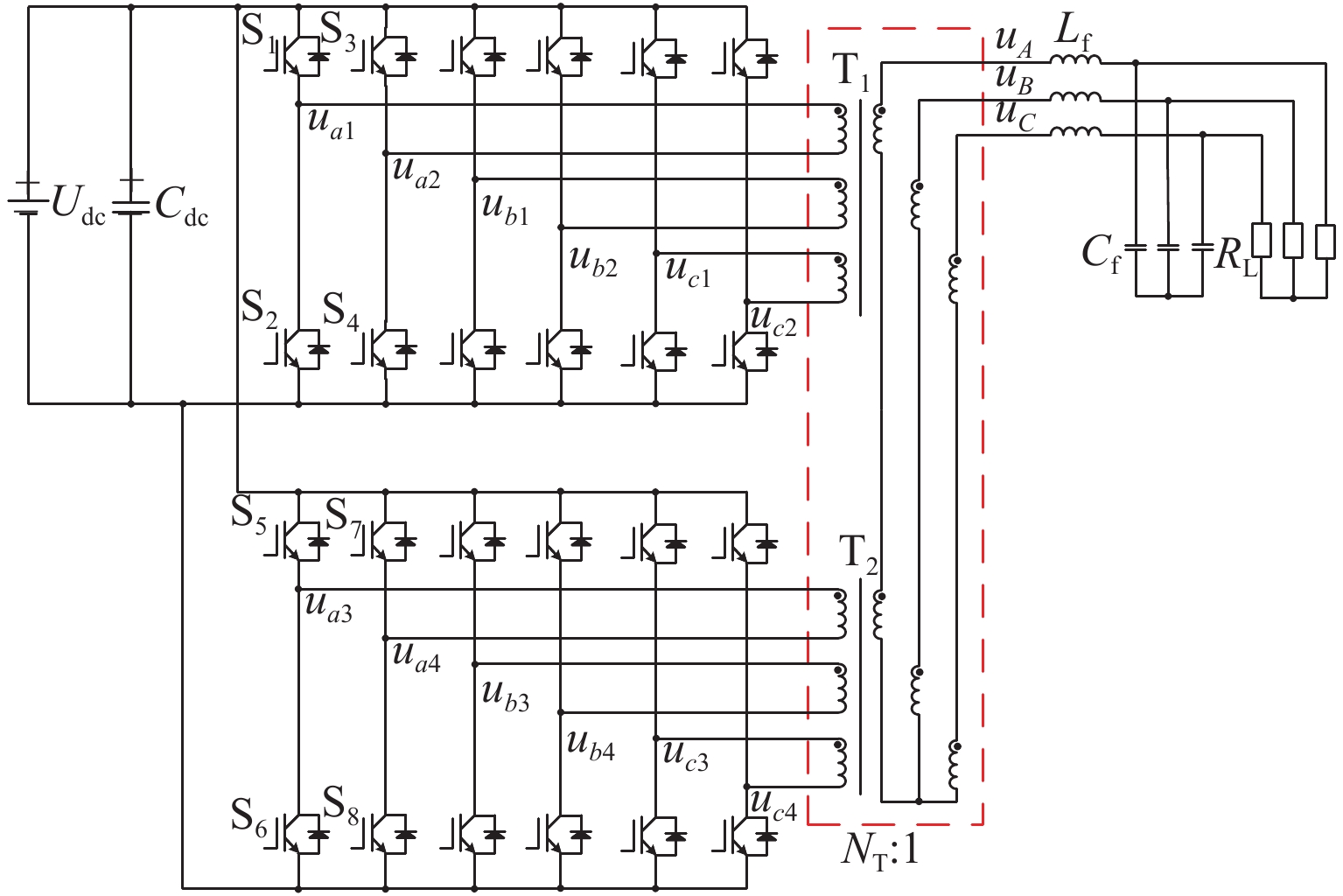
With the continuous development in miniaturization, lightness, high efficiency and invisibility for shipboard integrated power systems, the energy storage component gradually become an important part of power systems. For the three-phase isolated inverter in the power distribution system, the challenges of wide DC voltage range and high AC power quality arise, resulting the need to increase power density as much as possible and reduce noise. A three-phase dual inverter isolated of line frequency topology is proposed, which possesses high power density and low noise. Firstly, the use of multiple technologies significantly increases the equivalent switching frequency to achieve the effects of four times the phase voltage and five levels, which reduces acoustic noise, vibration noise, and the volume and weight of the vibration isolation and noise reduction device. Secondly, the phase-shift modulation strategy on carriers reduces the common-mode electromagnetic noise and the volume and weight of the EMI (electromagnetic interference) filter. Finally, the use of magnetic integration technology and the three-dimensional wound core structure reduces the volume and weight of the isolation transformer and output filter inductor. The experimental results show that compared with the traditional topology, the acoustic noise of the new topology is reduced by 8 dBA, and the vibration noise in whole frequency band is lower than the traditional topology. The volume power density reaches 136 kW/m3, the weight power density reaches 116 kW/t, and the overall efficiency reaches 93.5 %.

| [1] |
马伟明. 舰船综合电力系统中的机电能量转换技术[J]. 电气工程学报,2015,10(4): 1-10. doi: 10.11985/JEE.2015.04.001
Ma Weiming. Electromechanical power conversion technologies in vessel integrated power system[J]. Journal of Electrical Engineering, 2015, 10(4): 1-10. doi: 10.11985/JEE.2015.04.001
|
| [2] |
蒋栋,沈泽微,刘自程,等. 电力推进系统电力电子噪声的主动抑制技术进展[J]. 中国电机工程学报,2020,40(16): 5291-5301.
JIANG Dong, SHEN Zewei, LIU Zicheng, et al. Progress in active mitigation technologies of power electronics noise for electrical propulsion system[J]. Proceedings of the CSEE, 2020, 40(16): 5291-5301.
|
| [3] |
PINDORIYA R M, MISHRA A K, RAJPUROHIT B S, et al. An analysis of vibration and acoustic noise of BLDC motor drive[C]//2018 IEEE Power & Energy Society General Meeting(PESGM). Portland: IEEE, 2018: 1-5.
|
| [4] |
HUANG Y L, XU Y X, LI Y, et al. PWM frequency voltage noise cancelation in three-phase VSI using the novel SVPWM strategy[J]. IEEE Transactions on Power Electronics, 2018, 33(10): 8596-8606. doi: 10.1109/TPEL.2017.2778709
|
| [5] |
MIYAMA Y, ISHIZUKA M, KOMETANI H, et al. Vibration reduction by applying carrier phase-shift PWM on dual three-phase winding permanent magnet synchronous motor[J]. IEEE Transactions on Industry Applications, 2018, 54(6): 5998-6004. doi: 10.1109/TIA.2018.2862392
|
| [6] |
张逸成,叶尚斌,张佳佳,等. 电力电子设备传导噪声抑制措施研究综述[J]. 电工技术学报,2017,32(14): 77-86.
ZHANG Yicheng, YE Shangbin, ZHANG Jiajia, et al. Review of conducted noise suppression method for power electronic and electrical equipment[J]. Transactions of China Electrotechnical Society, 2017, 32(14): 77-86.
|
| [7] |
陈国呈,曹大鹏,张 翼,等. 一种三相三重化串联型电压源逆变器的谐波特性[J]. 电工技术学报,2007,22(7): 58-62. doi: 10.3321/j.issn:1000-6753.2007.07.010
CHEN Guocheng, CAO Dapeng, ZHANG Yi, et al. Harmonic characteristic analysis based on a three-phase tripled series-connected voltage source inverter[J]. Transactions of China Electrotechnical Society, 2007, 22(7): 58-62. doi: 10.3321/j.issn:1000-6753.2007.07.010
|
| [8] |
杨律,张俊洪,王铁军,等. 一种用于多重叠加逆变的圆形移相变压器[J]. 电力电子技术,2017,51(1): 99-101.
YANG Lü, HANG Junhong, WANG Tiejun, et al. A round shape phase-shift transformer applied in multi-module inverter[J]. Power Electronics, 2017, 51(1): 99-101.
|
| [9] |
窦祥,徐宁博,孙德. H桥逆变电路的并联移相SPWM多重化技术研究[J]. 国外电子测量技术,2018,37(8): 52-56.
DOU Xiang, XU Ningbo, SUN De. Research on parallel phase shifted SPWM multiplex technology for H bridge inverter circuit[J]. Foreign Electronic Measurement Technology, 2018, 37(8): 52-56.
|
| [10] |
赵镜红,马远征,孙盼. 基于直线式移相变压器的多重叠加逆变系统[J]. 电力自动化设备,2019,39(12): 183-187.
ZHAO Jinghong, MA Yuanzheng, SUN Pan. Multi-module inverter system based on linear phase-shifting transformer[J]. Electric Power Automation Equipment, 2019, 39(12): 183-187.
|
| [11] |
CHA W J, KIM K T, CHO Y W, et al. Evaluation and analysis of transformerless photovoltaic inverter topology for efficiency improvement and reduction of leakage current[J]. IET Power Electronics, 2015, 8(2): 255-267. doi: 10.1049/iet-pel.2014.0401
|
| [12] |
王恒利,付立军,揭贵生,等. 采用比例谐振和状态反馈的三相逆变器最优控制[J]. 西安交通大学学报,2013,47(8): 127-132.
WANG Hengli, FU Lijun, JIE Guisheng, et al. Optimal control of three-phase inverter based on state-feedback with proportional-resonant control[J]. Journal of Xi’an Jiaotong University, 2013, 47(8): 127-132.
|
| [13] |
王恒利,付立军,肖飞,等. 三相逆变器不平衡负载条件下双环控制策略[J]. 电网技术,2013,37(2): 398-404.
WANG Hengli, FU Lijun, XIAO Fei, et al. A double-loop control strategy for three-phase inverter with unbalanced load[J]. Power System Technology, 2013, 37(2): 398-404.
|
| [14] |
樊可钰,王政. 基于多载波实现光伏并网逆变器漏电流抑制研究[J]. 电力电容器与无功补偿,2016,37(2): 79-83.
FAN Keyu, WANG Zheng. Study on suppressing leakage current of photovoltaic grid-connection inverter based on multicarrier[J]. Power Capacitor & Reactive Power Compensation, 2016, 37(2): 79-83.
|
| [15] |
KUMAR A, CHATTERJEE D. A survey on space vector pulse width modulation technique for a two-level inverter[C]//8th National Power Electronics Conference. [S.l.]: IEEE, 2017: 78-83.
|
| [16] |
JACOB B J, BAIJU M R. A new space vector modulation scheme for multilevel inverters which directly vector quantize the reference space vector[J]. IEEE Transactions on Industrial Electronics, 2015, 62(1): 88-95. doi: 10.1109/TIE.2014.2326998
|
| [17] |
LI Y, WANG Y, LI B Q. Generalized theory of phase-shifted carrier PWM for cascaded H-bridge converters and modular multilevel converters[J]. IEEE Transactions on Power Electronics, 2016, 4(2): 589-605.
|
| [18] |
KIM S M, LEE J S, LEE K B. A modified level-shifted PWM strategy for fault tolerant cascaded multilevel inverters with improved power distribution[J]. IEEE Transactions on Industrial Electronics, 2016, 63(11): 7264-7274. doi: 10.1109/TIE.2016.2547917
|
| [19] |
KO Y, ANDRSEN M, BUTICCHI G, et al. Modulation strategy for highly reliable cascade H-bridge inverter based on discontinuous PMW[C]//IEEE Applied Power Electronics Conference and Exposition. [S.l.]: IEEE, 2017: 3241-3246.
|
Figures(15) / Tables(2)


 DownLoad:
DownLoad: