- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | MA Qinglu, FU Binglin, FENG Min. Trajectory Planning Methods for Bus Autonomous Parking with Vehicle Occupancy in Station[J]. Journal of Southwest Jiaotong University, 2022, 57(1): 74-82. doi: 10.3969/j.issn.0258-2724.20200628

|
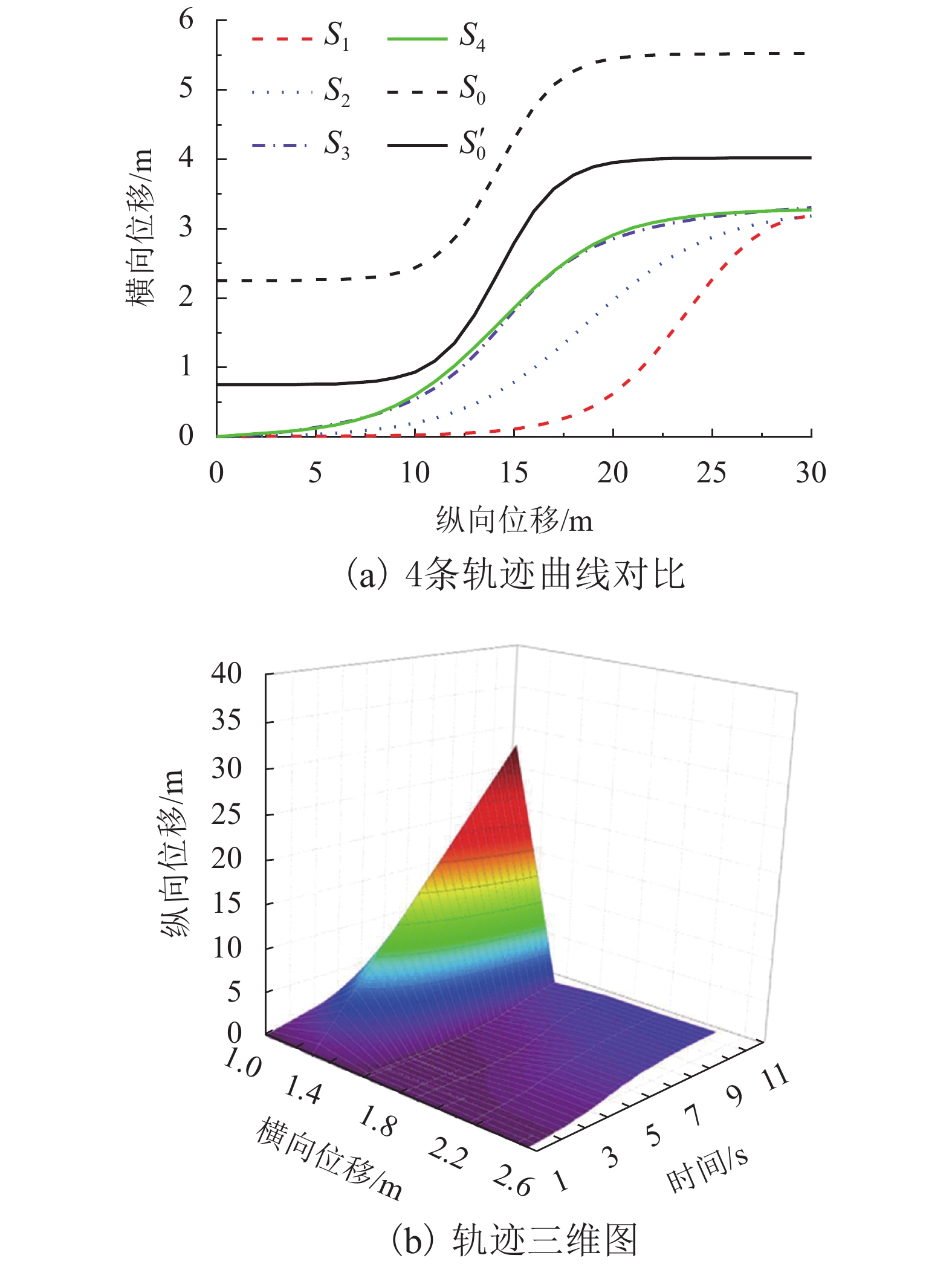
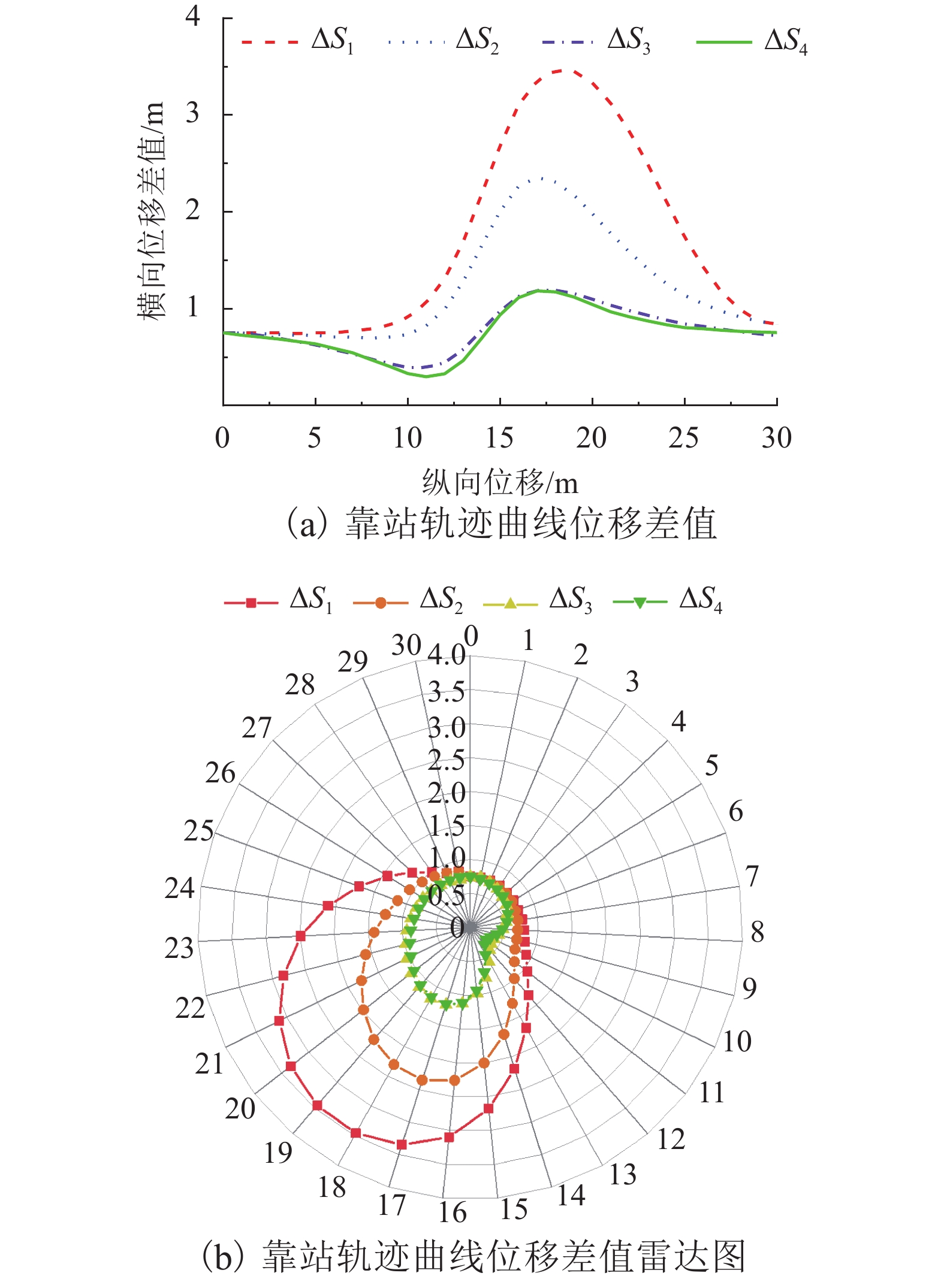
For automatic and safe parking of buses in public transportation environment, the safety constraints such as the degree of fitness with the platform geometry, the influence of vehicle occupancy, and the driving continuity are explored. The nonlinear constraint optimization function is used to calculate the continuous curvature of the arrival trajectory. A trajectory planning model for bus autonomous parking is built, and the Sigmoid function, cubic spline interpolation, arc-tangent function and improved arc-tangent function are used to simulate and analyze the parking trajectory of the bus under the restriction of the preceding vehicle. The experimental results show that the average disparity of 0.41 of the improved arc-tangent curve is much smaller than that of Sigmoid curve, cubic spline interpolation, and arc-tangent curve, which are 1.49, 1.051, and 0.52, respectively. Therefore, when there is vehicle occupancy in station, for the path planning of bus autonomous parking, the improved arc-tangent function is better than the other three methods. It has smoother trajectory curve, which is convenient for passengers to get on and off, and improves the vehicle operation efficiency .

| [1] |
马庆禄,冯敏,乔娅. 基于自动寻迹的港湾式公交站台停靠路径研究[J]. 交通运输系统工程与信息,2019,19(2): 108-115.
MA Qinglu, FENG Min, QIAO Ya. Parking path of harbourbus platform based on automatic tracking[J]. Journal of Transportation Systems Engineering and Information Technology, 2019, 19(2): 108-115.
|
| [2] |
罗文慧,董宝田,王泽胜. 基于车路协同的车辆定位算法研究[J]. 西南交通大学学报,2018,53(5): 1072-1077,1086. doi: 10.3969/j.issn.0258-2724.2018.05.026
LUO Wenhui, DONG Baotian, WANG Zesheng. Algorithm based on cooperative vehicle infrastructure systems[J]. Journal of Southwest Jiaotong University, 2018, 53(5): 1072-1077,1086. doi: 10.3969/j.issn.0258-2724.2018.05.026
|
| [3] |
潘亚嘉,聂哲俊,李锋,等. 无人驾驶快速公交车辆仿真分析[J]. 机械设计与制造,2019(12): 247-250. doi: 10.3969/j.issn.1001-3997.2019.12.060
PAN Yajia, NIE Zhejun, LI Feng, et al. Simulation analysis on unmanned bus rapid transit[J]. Machinery Design & Manufacture, 2019(12): 247-250. doi: 10.3969/j.issn.1001-3997.2019.12.060
|
| [4] |
李茂月,陈月,徐光岐. 基于入位基准线的避死区自动泊车路径规划[J]. 中国机械工程,2019,30(1): 53-63.
LI Maoyue, CHEN Yue, XU Guangqi. Automatic parking path planning for dead zone avoidance based on entrybaselines[J]. China Mechanical Engineering, 2019, 30(1): 53-63.
|
| [5] |
张家旭,赵健,施正堂,等. 采用HP自适应伪谱法的全自动泊车系统轨迹规划与跟踪控制[J]. 西安交通大学学报,2020,54(6): 176-184.
ZHANG Jiaxu, ZHAO Jian, SHI Zhengtang, et al. A trajectory planning and tracking control method forfully-automatic parking system using HP-adaptive pseudospectral method[J]. Journal of Xi’an Jiaotong University, 2020, 54(6): 176-184.
|
| [6] |
黄江,魏德奎,秦良艳,等. 自动泊车系统路径规划与跟踪控制方法研究[J]. 汽车技术,2019(8): 39-45.
HUANG Jiang, WEI Dekui, QIN Liangyan, et al. Research on path planning and tracking control method of automatic parking system[J]. Automobile Technology, 2019(8): 39-45.
|
| [7] |
钱立军,胡伟龙,刘庆,等. 多段式自动泊车路径规划及其关键技术[J]. 吉林大学学报(工学版),2016,46(3): 785-791.
QIAN Lijun, HU Weilong, LIU Qing, et al. Multiple segment method for automatic parking path planning and its key technology[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(3): 785-791.
|
| [8] |
UPADHYAY S, RATNOO A. Continuous-curvature path planning with obstacle avoidance using four parameter logistic curves[J]. IEEE Robotics and Automation Letters, 2016, 1(2): 609-616. doi: 10.1109/LRA.2016.2521165
|
| [9] |
WANG A, JASOUR A, WILLIAMS B. Non-Gaussian chance-constrained trajectory planning for autonomous vehicles in the presence of uncertain agents[J]. IEEE Robotics and Automation Letters, 2020, 5(4): 6041-6048. doi: 10.1109/LRA.2020.3010755
|
| [10] |
ZHU Z Y, LI N, SUN R Y, et al. Off-road autonomous vehicles traversability analysis and trajectory planning based on deep inverse reinforcement learning[C]//Proceedings of IEEE Intelligent Vehicles Symposium: IEEE, 2020: 971-977.
|
| [11] |
李红,郭孔辉,宋晓琳,等. 基于MATLAB的多约束自动平行泊车轨迹规划[J]. 中南大学学报(自然科学版),2013,44(1): 101-107.
LI Hong, GUO Konghui, SONG Xiaolin, et al. Trajectory planning of automatic parallel parking with multi-constraints based on MATLAB[J]. Journal of Central South University (Science and Technology), 2013, 44(1): 101-107.
|
| [12] |
李红,王文军,李克强. 基于B样条理论的平行泊车路径规划[J]. 中国公路学报,2016,29(9): 143-151. doi: 10.3969/j.issn.1001-7372.2016.09.019
LI Hong, WANG Wenjun, LI Keqiang. Path planning for parallel parking based on B spline theory[J]. China Journal of Highway and Transport, 2016, 29(9): 143-151. doi: 10.3969/j.issn.1001-7372.2016.09.019
|
Figures(8)



 DownLoad:
DownLoad: