- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | NONG Xingzhong, SHI Haiou, YUAN Quan, ZENG Wenqu, ZHENG Qing, DING Guofu. Review on BIM Technology Used in Urban Rail Transit Projects[J]. Journal of Southwest Jiaotong University, 2021, 56(3): 451-460. doi: 10.3969/j.issn.0258-2724.20200018

|

|
EASTMAN C M, EASTMAN C, TEICHOLZ P, et al. BIM handbook: a guide to building information modeling for owners, managers, designers, engineers and contractors[M]. 3rd edition. Hoboken: John Wiley & Sons, 2018.
|
|
清华大学BIM课题组. 中国建筑信息模型标准框架研究[M]. 北京: 中国建筑工业出版社, 2011.
|
|
尹亚辉. BIM技术在项目全生命周期的应用研究[D]. 北京: 北京建筑大学, 2015.
|
|
CEROVSEK T. A review and outlook for a ‘Building Information Model’ (BIM):a multi-standpoint framework for technological development[J]. Advanced Engineering Informatics, 2011, 25(2): 224-244. doi: 10.1016/j.aei.2010.06.003
|
|
纪博雅,戚振强. 国内BIM技术研究现状[J]. 科技管理研究,2015,35(6): 184-190. doi: 10.3969/j.issn.1000-7695.2015.06.035
JI Boya, QI Zhenqiang. BIM technology research status in China[J]. Science and Technology Management Research, 2015, 35(6): 184-190. doi: 10.3969/j.issn.1000-7695.2015.06.035
|
|
张建平,王洪钧. 建筑施工4D++模型与4D项目管理系统的研究[J]. 土木工程学报,2003,36(3): 70-78. doi: 10.3321/j.issn:1000-131X.2003.03.014
ZHANG Jianping, WANG Hongjun. A 4D++ site model and 4D management system for construction projects[J]. China Civil Engineering Journal, 2003, 36(3): 70-78. doi: 10.3321/j.issn:1000-131X.2003.03.014
|
|
LI Y F, WANG H C, ZHAO X F, et al. Research on BIM technology application in the construction of a subway station[J]. Applied Mechanics and Materials, 2013, 405/406/407/408: 3396-3400. doi: 10.4028/www.scientific.net/AMM.405-408.3396
|
|
杨永平,边颜东,周晓勤,等. 我国城市轨道交通存在的主要问题及发展对策[J]. 城市轨道交通研究,2013,16(10): 1-6.
YANG Yongping, BIAN Yandong, ZHOU Xiaoqin, et al. Problems and development strategy of urban railtransit in China[J]. Urban Mass Transit, 2013, 16(10): 1-6.
|
|
郭杰. 城市轨道交通工程接口管理研究[D]. 北京: 中国铁道科学研究院, 2011.
|
|
张金伟,刘志广,路清泉,等. 城市轨道交通工程BIM技术应用推广实施方法研究[J]. 现代隧道技术,2019,56(3): 45-52,71.
ZHANG Jinwei, LIU Zhiguang, LU Qingquan, et al. On application and promotion of BIM technique in urban rail transit engineering[J]. Modern Tunnelling Technology, 2019, 56(3): 45-52,71.
|
|
LI R J, SHAN R L, LIAO Q L, et al. New developments and applications in rail transit construction technology[J]. Applied Mechanics and Materials, 2014, 580/581/582/583: 1065-1071. doi: 10.4028/www.scientific.net/AMM.580-583.1065
|
|
LAAKSO M, KIVINIEMI A. The IFC standard − a review of history,development,and standardization[J]. Journal of Information Technology in Construction, 2012, 17(9): 134-161.
|
|
中国建筑科学研究院, 中国标准化研究院, 清华大学, 等. 工业基础类平台规范: GB/T 25507—2010[S]. 北京: 中国标准出版社, 2010.
|
|
ZHANG L, el-GOHARY N M. Automated IFC-based building information modelling and extraction for supporting value analysis of buildings[J]. International Journal of Construction Management, 2020, 20(4): 269-288. doi: 10.1080/15623599.2018.1484850
|
|
林佳瑞,张建平. 基于IFC的绿色性能分析数据转换与共享[J]. 清华大学学报(自然科学版),2016,56(9): 997-1002.
LIN Jiarui, ZHANG Jianping. Data conversion and sharing for building performance analyses based on IFC[J]. Journal of Tsinghua University (Science and Technology), 2016, 56(9): 997-1002.
|
|
李浩,赵国堂,范丁元,等. 面向GIS应用的铁路工程三维信息模型数据交换方法[J]. 西南交通大学学报,2018,53(1): 197-205. doi: 10.3969/j.issn.0258-2724.2018.01.024
LI Hao, ZHAO Guotang, FAN Dingyuan, et al. Data exchange method of railway engineering information model for GIS applications[J]. Journal of Southwest Jiaotong University, 2018, 53(1): 197-205. doi: 10.3969/j.issn.0258-2724.2018.01.024
|
|
赵铁柱. 城市轨道交通站台门参数化三维建模软件开发与应用[J]. 城市轨道交通研究,2017,20(5): 147-152.
ZHAO Tiezhu. Development and application of 3D parametric modeling software for urban rail transit platform screen door system[J]. Urban Mass Transit, 2017, 20(5): 147-152.
|
|
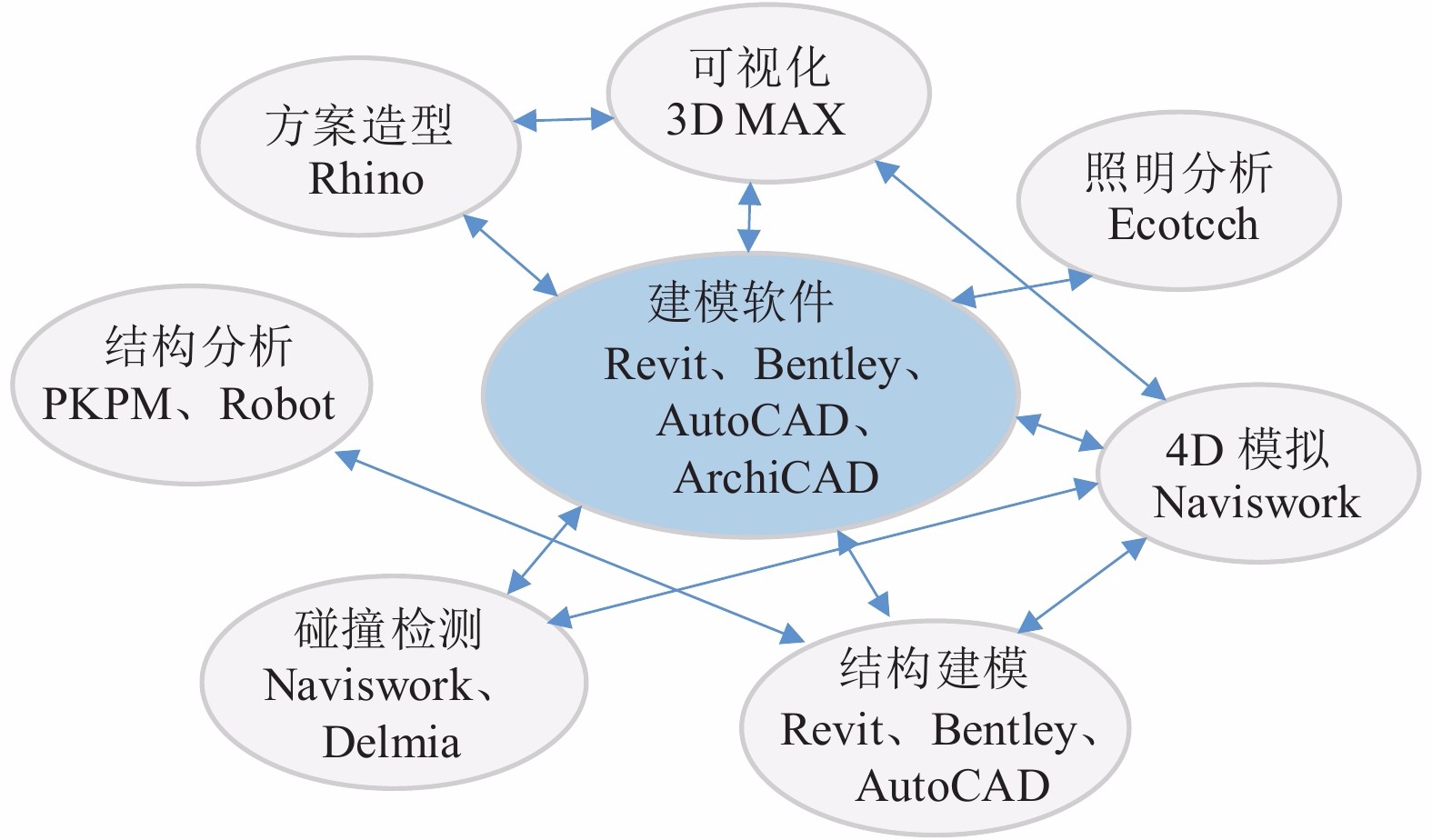
邓雪原. CAD、BIM与协同研究[J]. 土木建筑工程信息技术,2013,5(5): 20-25.
DENG Xueyuan. The study of CAD, BIM and collaboration[J]. Journal of Information Technology in Civil Engineering and Architecture, 2013, 5(5): 20-25.
|
|
韩亮亮. 基于3D EXPERIENCE平台的铁路设备BIM模型轻量化技术研究[J]. 科技创新与应用,2020(5): 19-22.
HAN Liangliang. Research on lightweight technology of railway equipment BIM model based on 3D EXPERIENCE platform[J]. Technology Innovation and Application, 2020(5): 19-22.
|
|
吕婧,金浩然,谭军,等. glTF在BIM模型轻量化中的应用[J]. 科技创新与应用,2020(6): 174-176.
|
|
王巧雯,张加万,牛志斌. 基于建筑信息模型的建筑多专业协同设计流程分析[J]. 同济大学学报(自然科学版),2018,46(8): 1155-1160.
WANG Qiaowen, ZHANG Jiawan, NIU Zhibin. Architecture multi-disciplinary collaborative design process based on building information model[J]. Journal of Tongji University (Natural Science), 2018, 46(8): 1155-1160.
|
|
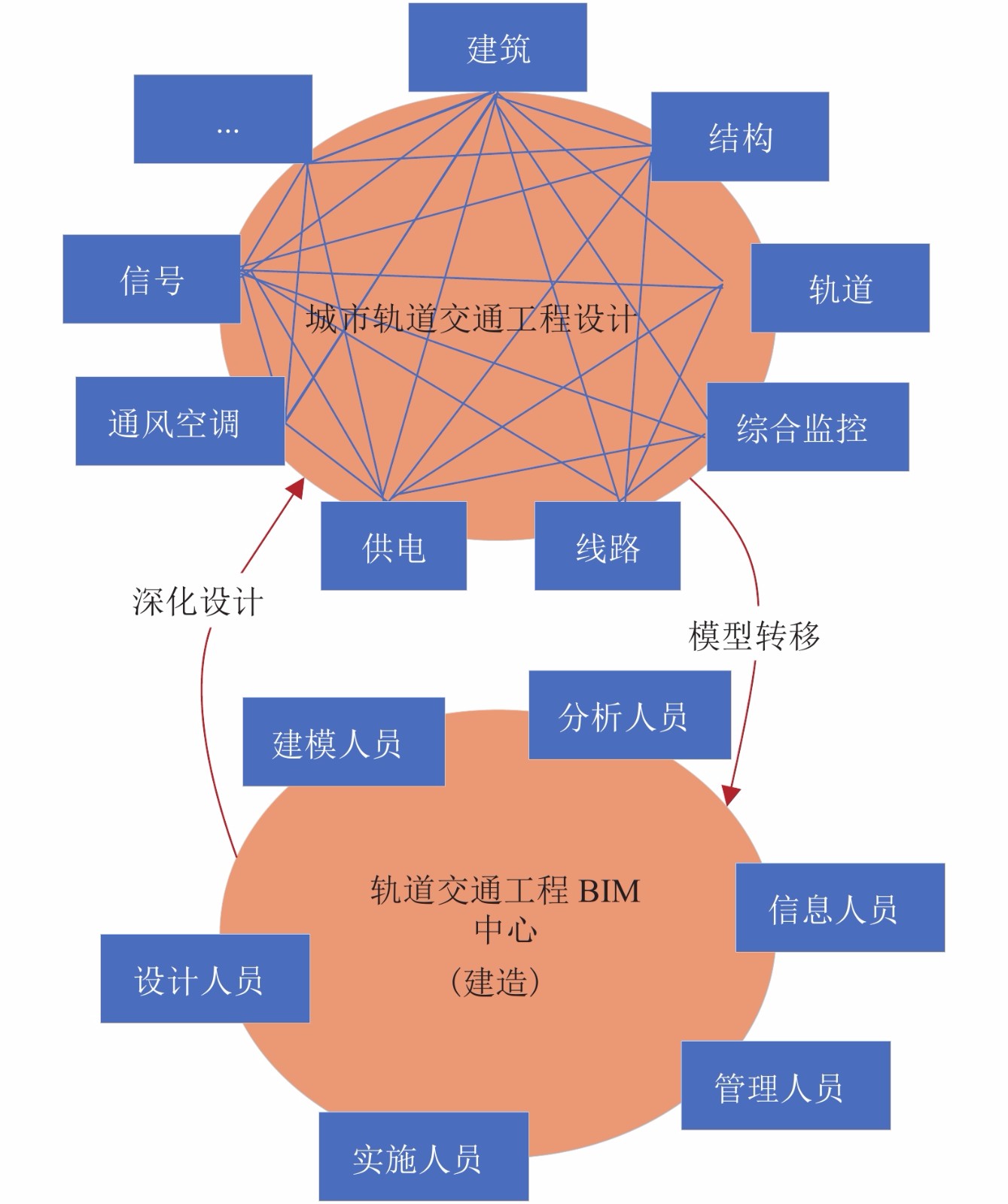
史海欧,袁泉,张耘琳,等. 基于BIM交互与数据驱动的多专业正向协同设计技术[J]. 西南交通大学学报,2021,56(1): 176-181.
SHI Haiou, YUAN Quan, ZHANG Yunlin, et al. Multi-discipline forward collaborative design technology based on BIM interaction and data-driven[J]. Journal of Southwest Jiaotong University, 2021, 56(1): 176-181.
|
|
高云. 高层建筑火灾烟雾颗粒物扩散路径监测方法研究[J]. 环境科学与管理,2020,45(1): 131-135. doi: 10.3969/j.issn.1673-1212.2020.01.026
GAO Yun. Research on monitoring method of smoke particles diffusion path in high-rise building fire[J]. Environmental Science and Management, 2020, 45(1): 131-135. doi: 10.3969/j.issn.1673-1212.2020.01.026
|
|
EL-DIRABY T, KRIJNEN T, PAPAGELIS M. BIM-based collaborative design and socio-technical analytics of green buildings[J]. Automation in Construction, 2017, 82: 59-74. doi: 10.1016/j.autcon.2017.06.004
|
|
王勇,李久林,张建平. 建筑协同设计中的BIM模型管理机制探索[J]. 土木建筑工程信息技术,2014,6(6): 64-69. doi: 10.3969/j.issn.1674-7461.2014.06.012
WANG Yong, LI Jiulin, ZHANG Jianping. Exploration of BIM management mechanism in collaborative design[J]. Journal of Information Technology in Civil Engineering and Architecture, 2014, 6(6): 64-69. doi: 10.3969/j.issn.1674-7461.2014.06.012
|
|
YANG T, LU Y Q, QIN H Y. Catia-based BIM technology in highway tunnel design[J]. Stavební Obzor:Civil Engineering Journal, 2019, 28(3): 469-482.
|
|
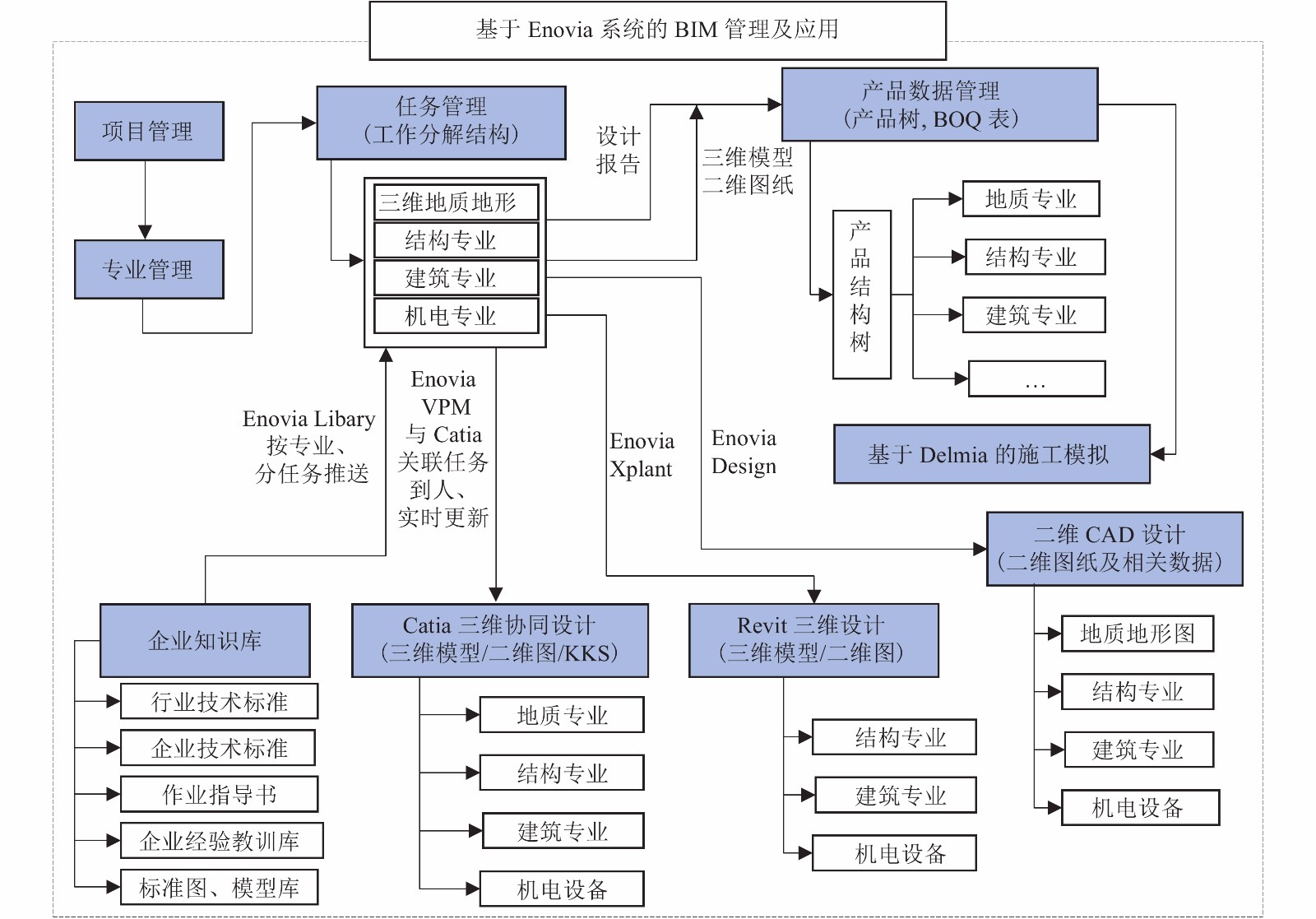
陈宇,庞艳婷,朱嘉. ENOVIAVPM系统平台在城市轨道车辆协同设计中的应用[J]. 电子技术与软件工程,2016(21): 75.
|
|
YANG H X. Integration model of construction management of BIM construction project based on IFC[J]. Journal of Computational and Theoretical Nanoscience, 2016, 13(12): 9368-9372. doi: 10.1166/jctn.2016.5849
|
|
HU Z Z, ZHANG J P. BIM- and 4D-based integrated solution of analysis and management for conflicts and structural safety problems during construction:2. development and site trials[J]. Automation in Construction, 2011, 20(2): 167-180. doi: 10.1016/j.autcon.2010.09.014
|
|
LI X, XU J, ZHANG Q. Research on construction schedule management based on BIM technology[J]. Procedia Engineering, 2017, 174: 657-667. doi: 10.1016/j.proeng.2017.01.214
|
|
张飞涟,郭三伟,杨中杰. 基于BIM的建造工程项目全寿命期集成管理研究[J]. 铁道科学与工程学报,2015,12(3): 702-708. doi: 10.3969/j.issn.1672-7029.2015.03.038
ZHANG Feilian, GUO Sanwei, YANG Zhongjie. Research on the life cycle integrated management of construction projects based on BIM[J]. Journal of Railway Science and Engineering, 2015, 12(3): 702-708. doi: 10.3969/j.issn.1672-7029.2015.03.038
|
|
广州地铁集团有限公司. 城市轨道交通建筑信息模型(BIM)建模与交付标准: DBJ/T 15-160—2019[S]. 广州: 广东省住房和城乡建造厅, 2019.
|
|
广州地铁设计研究院有限公司. 城市轨道交通BIM模型交付标准: Q/GZDTSJY-QEOB-045—2015[S]. 广州: 广州地铁设计研究院有限公司, 2015.
|
|
PAZLAR T, TURK Ž. Interoperability in practice:geometric data exchance using the IFC standard[J]. Journal of Information Technology in Construction, 2008, 13: 362-380.
|
|
WON J, LEE G, CHO C. No-schema algorithm for extracting a partial model from an IFC instance model[J]. Journal of Computing in Civil Engineering, 2013, 27(6): 585-592. doi: 10.1061/(ASCE)CP.1943-5487.0000320
|
|
BIRGING E. Integration of BIM in the construction phase a study of a Swedish construction project based on interviews[D]. Göteborg: Chalmers University of Technology, 2014.
|
|
杨新,焦柯,鲁恒,等. 基于BIM的建筑正向协同设计平台模式研究[J]. 土木建筑工程信息技术,2019,11(4): 28-32.
YANG Xin, JIAO Ke, LU Heng, et al. Research on forward collaborative design platform of buildings based on BIM[J]. Journal of Information Technology in Civil Engineering and Architecture, 2019, 11(4): 28-32.
|
|
张洋. 基于BIM的建筑工程信息集成与管理研究[D]. 北京: 清华大学, 2009.
|
|
SUN C L, LIU C, SHI D. Construction and application of integration under IFC standard based on BIM database[J]. Advanced Materials Research, 2014(5): 1894-1897.
|
|
施平望,林良帆,邓雪原. 基于IFC标准的建筑构件表达与管理方法研究[J]. 图学学报,2016,37(2): 249-256.
SHI Pingwang, LIN Liangfan, DENG Xueyuan. Research on representation and management of IFC-based building components[J]. Journal of Graphics, 2016, 37(2): 249-256.
|
|
何志红,孙会龙,刘贞,等. 基于BIM + VR技术的装配式建筑远程协同平台设计[J]. 重庆理工大学学报(自然科学),2019,33(10): 96-102.
HE Zhihong, SUN Huilong, LIU Zhen, et al. Design of remote collaborative platform for prefabricated construction based on BIM + VR technology[J]. Journal of Chongqing University of Technology (Natural Science), 2019, 33(10): 96-102.
|
|
卫星, 邹建豪, 肖林, 等. 基于BIM的钢桁梁桥裂纹病害信息数字化管理[J/OL]. 西南交通大学学报, 2019: 1-9. (2019-10-13)[2020-01-13]. http://kns.cnki.net/kcms/detail/51.1277.U.20191023.1121.013.html.
WEI Xing, ZOU Jianhao, XIAO Lin, et al. Digital management of crack disease information in steel struss bridges based on BIM[J/OL]. Journal of Southwest Jiaotong University, 2019: 1-9. (2019-10-13)[2020-01-13]. http://kns.cnki.net/kcms/detail/51.1277.U.20191023.1121.013.html.
|

Figures(5) / Tables(2)


 DownLoad:
DownLoad: