- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

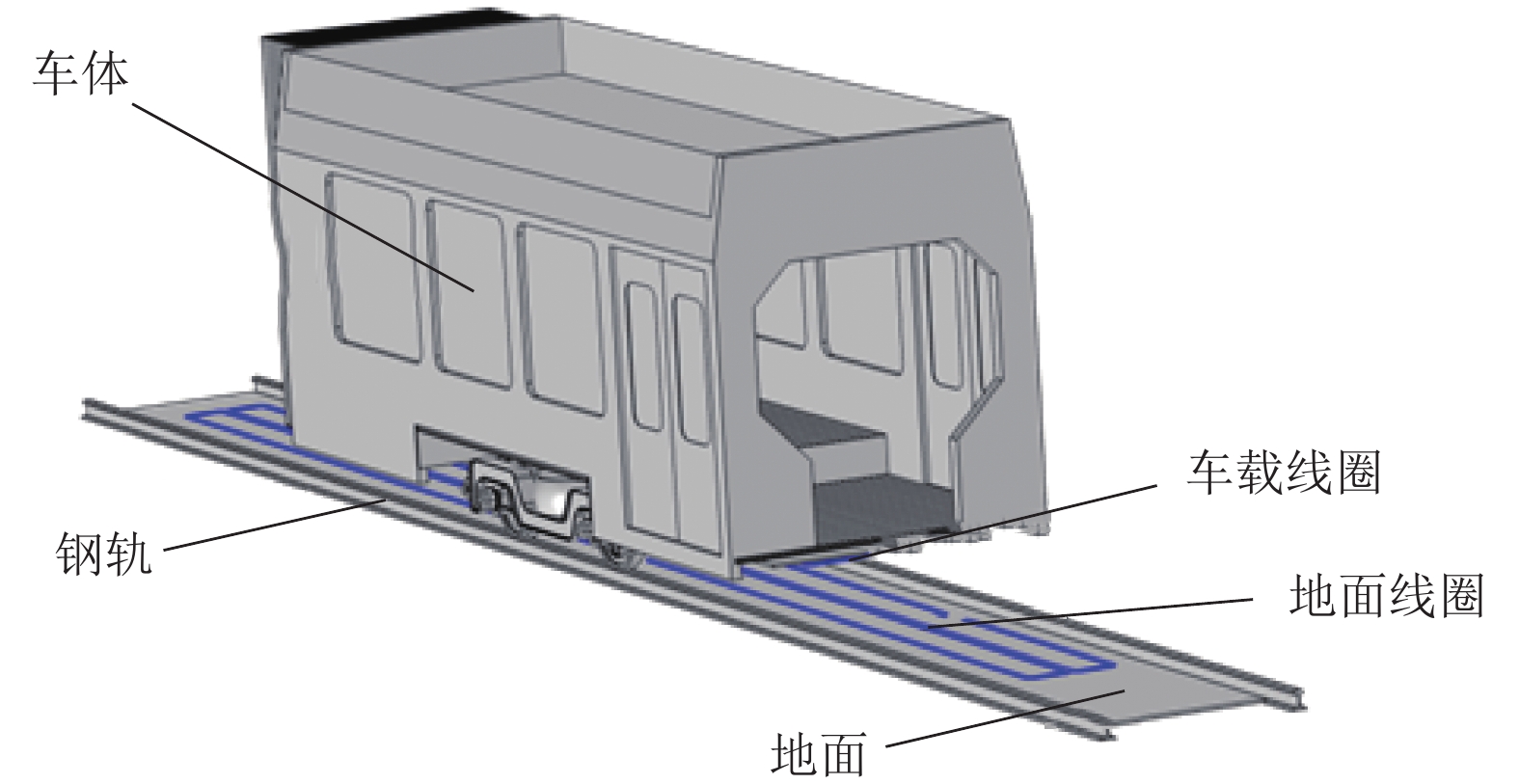
| Citation: | WANG Yanqin, ZHANG Qiumin, LIN Feihong, DONG Liang. Electromagnetic-Thermal Field Coupling Calculation of Contactless Power Transfer Vehicle[J]. Journal of Southwest Jiaotong University, 2020, 55(3): 545-551. doi: 10.3969/j.issn.0258-2724.20191123

|

|
LIU C, HU A P, WANG B, et al. A capacitively-coupled contactless matrix charging platform with softswitched transformer control[J]. IEEE Transactions on Industrial Electronics, 2013, 60(1): 249-260. doi: 10.1109/TIE.2011.2172174
|
|
陈琛,黄学良,谭林林,等. 电动汽车无线充电时的电磁环境和安全评估[J]. 电工技术学报,2015,30(19): 61-67. doi: 10.3969/j.issn.1000-6753.2015.19.010
CHEN Chen, HUANG Xueliang, TAN Linlin, et al. Electromagnetic environment and security evaluation for wireless charging of electric vehicles[J]. Transactions of China Electrotechnical Society, 2015, 30(19): 61-67. doi: 10.3969/j.issn.1000-6753.2015.19.010
|
|
武瑛. 新型无接触供电系统的研究[D]. 北京: 中国科学院电工研究所, 2004.
|
|
THEODORIDIS M P. Effective capacitive power transfer[J]. IEEE Transactions on Power Electronics, 2012, 27(12): 4906-4913. doi: 10.1109/TPEL.2012.2192502
|
|
LI Xiangyu, ZHA Junwei, WANG Sijiao, et al. Effect of high-thermal conductivity epoxy resin on heat dissipation performance of saturated reactor[J]. IEEE Transactions on Dielectrics and Electrical Insulation, 2017, 24(6): 3898-3905. doi: 10.1109/TDEI.2017.006873
|
|
姜志鹏,文习山,王羽,等. 特高压干式空心平波电抗器温度场耦合计算与试验[J]. 中国电机工程学报,2015,35(20): 5344-5350.
JIANG Zhipeng, WEN Xishan, WANG Yu, et al. Test and coupling calculation of temperature field for UHV dry-type air-core smoothing reactor[J]. Proceedings of the CSEE, 2015, 35(20): 5344-5350.
|
|
刘志刚,耿英三,王建华,等. 基于流场-温度场耦合计算的新型空心电抗器设计与分析[J]. 电工技术学报,2003,18(6): 59-63. doi: 10.3321/j.issn:1000-6753.2003.06.012
LIU Zhigang, GENG Yingsan, WANG Jianhua, et al. Design and analysis of new type air-core reactor based on coupled fluid thermal field calculation[J]. Transactions of China Electrotechnical Society, 2003, 18(6): 59-63. doi: 10.3321/j.issn:1000-6753.2003.06.012
|
|
VERSTEEG H K, MALALASEKERA W. An introduction to compu-tational fluid dynamics: the finite volume method[M]. London: Pearson Education, 2007: 10-17.
|
|
邰永,刘赵淼. 感应电机全域三维瞬态温度场分析[J]. 中国电机工程学报,2010,30(30): 114-120.
TAI Yong, LIU Zhaomiao. Analysis on three-dimensional transient temperature field of induction motor[J]. Proceedings of the CSEE, 2010, 30(30): 114-120.
|
|
丁树业,孟繁东,葛云中. 核主泵屏蔽电机温度场研究[J]. 中国电机工程学报,2012,32(36): 149-155.
DING Shuye, MENG Fandong, GE Yunzhong. Temperature field investigation of canned primary pump motors in nuclear power stations[J]. Proceedings of the Chinese Society for Electrical Engineering, 2012, 32(36): 149-155.
|
Figures(14) / Tables(6)


 DownLoad:
DownLoad: