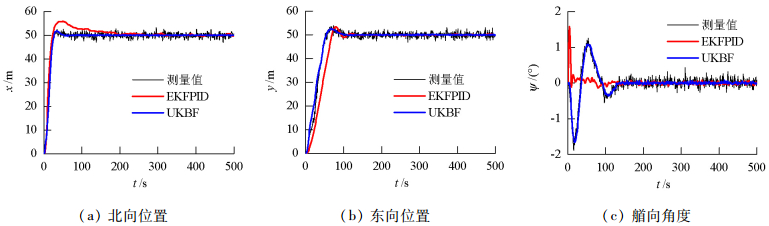
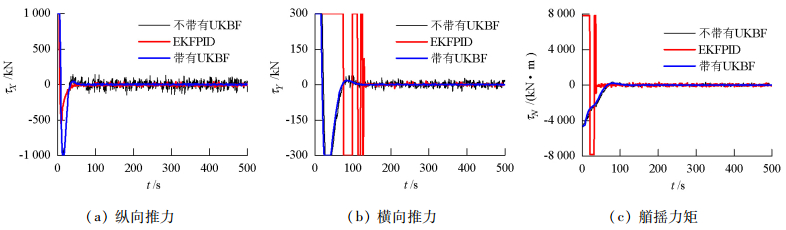
For surface vessel dynamic positioning (DP) system controls, a design method for predictive controllers is proposed based on the unscented Kalman-Bucy filtering (UKBF) algorithm and on a non-switching analytical model predictive control (NSAMPC) method. To avoid linearization and discretization errors in the model, the UKBF algorithm was applied to determine motion-state estimates of the ship. On the basis of the relative degree concept and non-linear ship motion models, an NSAMPC controller was designed in order to maintain a floating vessel at a specific position. The proposed method was verified by performing simulations on a marine supply vessel. The simulation results exhibit a smoother output of the designed controller, which is helpful for reducing the wear on the propeller. Moreover, the proposed controller results in a settling time of less than 40 s for the north position of the vessel with an overshoot of less than 5%. Likewise, the controller results in an east-position settling time of less than 60 s with an overshoot of less than 5%. In addition, the maximum offset of the vessel heading angle is less than 1.5°. The proposed controller allows the ship to reach the specific position quickly.
GRIMBLE M J, PATTON R J, WISE D A. The design of dynamic ship positioning control systems using extended Kalman filtering techniques[C]//OCEANS'79.[S.l.]: IEEE, 1979: 488-497.
JIANG Yilin, ZHANG Fangyuan. Clock synchroniza-tion algorithm based on particle swarm optimization with natural selection[J]. Journal of Southwest Jiaotong University, 2017, 52(3):593-599. doi: 10.3969/j.issn.0258-2724.2017.03.021
GGERSIMO G R. Sensor fusion-based dynamic positioning of ships using extended Kalman and particle filtering[J]. Robotica, 2013, 31(3):389-403. doi: 10.1017/S0263574712000409
WANG Xiaofei, ZOU Zaojian, WANG Yang, et al. Path following control of underactuated ships based on unscented Kalman filter[J]. Journal of Shanghai Jiaotong University, 2010, 15(1):108-113. doi: 10.1007/s12204-010-8707-4
JAYASIRI A, NANDAN A, IMTIAZ S, et al. Dynamic positioning of vessels using a UKF-based observer and an NMPC-based controller[J]. IEEE Transactions on Automation Science & Engineering, 2017, 14(4):1778-1785. http://ieeexplore.ieee.org/document/7947197/
HU X, DU J, SHI J. Adaptive fuzzy controller design for dynamic positioning system of vessels[J]. Applied Ocean Research, 2015, 53:46-53. doi: 10.1016/j.apor.2015.07.005
NGONGI W E, DU J, WANG R. Robust fuzzy controller design for dynamic positioning system of ships[J]. International Journal of Control, Automation and Systems, 2015, 13(5):1294-1305. doi: 10.1007/s12555-014-0239-5
ZHANG Jinlong, XU Hui, LIU Jingnan, et a1. PID control based on fuzzy neural network for precision angular alignment[J]. Chinese Journal of Scientific Instrument, 2012, 33(3):549-554. doi: 10.3969/j.issn.0254-3087.2012.03.010
ZHANG Guoyin, YANG Zhi, TAN Hongzhou. Research on non-switch analytic nonlinear model predictive control method for a class of nonlinear systems[J]. Acta Automatic Sinica, 2008, 34(9):1147-1156. http://d.old.wanfangdata.com.cn/Periodical/zdhxb200809016



 下载:
下载:









 DownLoad:
DownLoad: